Embed Size (px)
Citation preview

IRRIGATION AND DRAINAGE
Irrig. and Drain. (2011)
Published online in Wiley Online Library (wileyonlinelibrary.com) DOI: 10.1002/ird.654
A SIMPLIFIED MULTI-OBJECTIVE GENETIC ALGORITHM OPTIMIZATION MODELFOR CANAL SCHEDULING†
S. Z. PENG1, Y. WANG1*, S. KHAN2, T. RANA3 and Y. F. LUO1
1State Key Laboratory of Hydrology-Water Resources and Hydraulic Engineering, Hohai University, Nanjing, China2UNESCO Division of Water Sciences, Paris, France
3Cooperative Research Centre for Irrigation Futures, Darling Heights, Australia
ABSTRACT
A simplified Multi-Objective Genetic Algorithm Optimization Model (MOM-GA) for canal scheduling under unequal flowrates of distributary canals is presented in this paper. This MOM-GA was designed for dynamic rotational scheduling withtwo objectives: to reduce fluctuations of flow rates of superior canals, and to reduce seepage losses of canal systems. Thismodel was programmed in MATLAB using its genetic algorithm functions. Application of this model was demonstrated witha case study of the Nanguan Main Canal system (NMC) in the Gaoyou Irrigation Area, China. The results demonstrated thatthe MOM-GA is an effective model for optimizing canal scheduling. NMC keeps running under a relatively steady range, andthe seepage losses are reduced by around half that under current and binary optimized scheduling. The MOM-GA is alsosufficiently flexible to be applied to different levels in canal systems as a simplified approach for canal scheduling designand operation. The optimization results given by MOM-GA can assist irrigators to make better canal scheduling decisionsin each irrigation event. Copyright © 2011 John Wiley & Sons, Ltd.
key words: canal scheduling; multi-objective; non-linear; unequal flow rates; genetic algorithm; optimization
Received 21 January 2010; Revised 19 July 2011; Accepted 20 July 2011
RÉSUMÉ
Ce papier traite d’un modèle d’optimisation faisant appel à un algorithme génétique multi objectif simplifié (abréviationen anglais MOM-GA) qui est utilisé pour programmer un canal qui alimente différentes branches sous des régimes inégauxde débit. Ce MOM-GA a été établi pour la programmation dynamique et rotatoire avec le double objectif de diminuer lesfluctuations de débit du canal supérieur et de réduire les pertes par infiltration du système de canaux. Le modèle a étéprogrammé dans MATHLAB en utilisant ses fonctions d’algorithme génétique. Le modèle a été appliqué dans le canalprincipal de Nanguam dans le système irrigué de Gaoyou, en Chine. Les résultats démontrent que MOM-GA est adapté pouroptimiser la programmation du canal, qui fonctionne ainsi dans une gamme relative stable avec des pertes par lessivage réduitesde moitié, en utilisant la programmation actuelle ou binaire optimisée. Le MOM-GA est également suffisamment flexible etpeut être appliqué à différents niveaux des systèmes de canaux et constitue une approche simplifiée pour sa programmationet son fonctionnement. Les résultats d’optimisation donnés par MOM-GA peuvent aider les irrigants à prendre de meilleuresdécisions de programmation du canal pour chaque épisode d’irrigation.
mots clés: programmation d’un canal; débits inégaux; multi-objectifs; non-linéaires algorithme génétique; optimisation
* Correspondence to: Y. Wang, Hohai University - State Key Laboratory ofHydrology-Water Resources and Hydraulic Engineering, Hohai University,1 Xikang Road Nanjing Jiangsu 210098, China.E-mail: [email protected]†Une version simplifiée d'un modèle d'optimisation utilisant un algorithmegénétique multi-objectif pour la programmation d'un canal.
Copyright © 2011 John Wiley & Sons, Ltd.
INTRODUCTION
Increasing competition between domestic, industrial andagricultural water uses has threatened the sustainability ofwater resources (Khan et al., 2006). Agriculture consumesabout 50% of total water supplies in developed countrieson average, and around 70% in China. In addition, irrigation

S. Z. PENG ET AL.
efficiency is around 70% in developed countries, but only30–40% in China (Liu, 2006). There are 402 irrigation areasover 3000 km2 in China, which have a great potential to savewater. Effective utilization of irrigation water can alleviatethe pressure on irrigation availability. Large irrigationschemes usually consist of a regional conveyance, on-farmdistribution and on-field application (Paydar et al., 2009).Canal scheduling is a conveyance component and it isthe key activity influencing irrigation system performancecompared with other irrigation activities (Chambers, 1988).
CLASSIFICATIONS
There are three principal canal scheduling methods: con-tinuous, rotational, and on-demand (Bhadra et al., 2010).Continuous scheduling means a constant or variable flow rateis maintained without interruption throughout an irrigationperiod. Continuous canal scheduling is commonly used inthe main and branch canals of large irrigation areas. Thisscheduling is suitable for canals whose feeder canal has suffi-cient flow rates to satisfy distributary canals at the same time.
Rotational scheduling means a constant or variable flowrate is given by a fixed or variable irrigation duration, orfrequency, which can be interrupted. Rotational canalscheduling is commonly used in tertiary and tail canals,and branch canals with small irrigation areas. An advantageof rotational canal scheduling is that the irrigation periodcan be reduced due to greater distributary flow rates com-pared with the flow rates of continuous canal scheduling.In this way, crop water requirements are more easilysatisfied on schedule, especially when the superior canalflow rate is not adequate to supply water to all the distribu-tary canals simultaneously. Rotational scheduling can bedivided into two categories: fixed and dynamic. Fixedrotational scheduling is rotated with a predeterminedirrigation duration, end time, and flow rate based onirrigation or planted areas (Mateos et al., 2002). Fixedrotational scheduling is popular in irrigation areas world-wide due to its easy scheduling and operation. But whenflow rates of distributary canals are different, this methodmay not satisfy crop water requirements on schedule, maycause flooding, or may result in large volumes of wateroversupply. Dynamic rotational scheduling is rotated witha dynamic irrigation time, irrigation end time or flow rate.Dynamic rotational scheduling is adapted to distributarycanals with unequal flow rates. The irrigation time changeswith the variable flow rate within an irrigation period tosatisfy one or multiple objective functions.
On-demand scheduling means flow rate, duration, andfrequency may all be changed during an irrigation seasonin order to meet a particular goal such as crop water require-ment or water availability. On-demand scheduling is the
Copyright © 2011 John Wiley & Sons, Ltd.
best way to supply water to crops on time, but it isdifficult to achieve operationally without monitoring soilmoisture, and automatic control of gates. Most on-demandscheduling follows the semi-demand method, instead ofon-demand (Pulido-Calvo et al., 2003; Arif et al., 2006).Semi-demand scheduling is based on farmers’ experienceand irrigation availability limitations, which are not solelydetermined by crop water requirements. However, semi-demand scheduling is still not easy to operate comparedwith rotational scheduling. That is because an irrigationsystem needs to be regarded as a whole system witheffective management by adopting advanced technology.In summary, rotation canal scheduling is a good option formost irrigation areas.
MODEL REVIEWS
Distributary canals commonly have different lengths andirrigated areas. They run at different flow rates, whichrequire different irrigation durations and end times. As aresult, rotational canal scheduling becomes a complexprocess. However, rotational canal scheduling is difficultto determine by experience, especially for large numbersof distributary canals. The disadvantages of experience-baseddecisions in rotational scheduling have been mentionedby many researchers (Santhi and Pundarikanthan, 2000;Mishra et al., 2002). Many useful models for rotational canalscheduling have been developed.
Some models are based on a water balance model andsoil moisture simulation to estimate water deliveries totertiary and secondary canals. Rajput and Michael (1989)used a daily soil moisture and water balance equation tooperate canals. This model was set up for a four-branchcanal system. Vedula et al. (1993) used dynamic prog-ramming to optimize allocation of water during differentseasons for a single crop, considering soil moistureimpacts. Li and Yuan (1994) developed a canal rotationalscheduling system according to soil moisture calculations.Wang et al. (1995) optimized scheduling to maximizeprofits by coordinating the timing and volume of irrigationwater. These models have operational difficulties due tothe overheads of collecting soil moisture data across thewhole irrigation area, and some limitations caused by impre-cise assumptions.
Models focusing on flow rate, duration, and frequency ofirrigation have been developed. The early models werenormally linear, single objective models with many assump-tions. Suryavanshi and Reddy (1986) developed a binarymodel using stream tubes to simulate the canal system,with an assumption of equal discharge from each outletto minimize the total number of stream tubes used. Reddyet al. (1999) developed a rotational canal scheduling
Irrig. and Drain. (2011)

MULTI-OBJECTIVE CANAL SCHEDULING OPTIMIZATION
optimization model to minimize the differences between theactual and required supply capacity. Similar research hasbeen done by Vyas and Sarma (1992) and by Mandaviaand Acharya (1995). Anwar and Clarke (2001) developedtwo canal scheduling models by using a mixed-integer linearprogramming method. These two models minimized thesum for all outlets of the difference between the scheduledstart time and the required target start times set by farmers,assuming canals ran at fixed flow rates. Haq and Anwar(2010) established two multi-objective optimization models:a stream tube model and a time block model. The streamtube model minimized the number of stream tubes and thetotal earliness/tardiness of outlets. The time block modelminimized the earliness/tardiness and discharge channelcapacity. One of the limitations of all of these models is thatequal delivery of flow rates at the head of distributary canalsis required.
Canal systems with unequal flow rates are much morecommon in irrigation areas. Ma et al. (2006) consideredseepage loss minimization as an objective function ofscheduling for an unequal flow rate canal system. Li et al.(2007) established an optimization model to keep theirrigation flow rate as a constant. Wardlaw and Bhaktikul(2004a) optimized the utilization of water resources inrotational irrigation systems. Santhi and Pundarikanthan (2000)developed a multi-objective (equity, adequacy and timeliness)model for rotational canal scheduling on a weight basis.
i
Solution approaches
Linear single objective models were often solved by usinga branch-and-bound optimization technique. Many commer-cial programs can easily solve this problem, such as LINGOand LINDO. However, this approach is not effective insolving non-linear multiple objective models.
A genetic algorithm (GA) is a global optimizationtechnique that uses a random searching method. It learnsfrom natural selection in the biosphere and genetic mechan-isms (Nathalie and Désidéri, 1999; Alvarez, 2000). It isdifficult to guarantee finding the global optimum usingGA, but it can be converged quickly to a near-optimalsolution (Farmani et al., 2007). GA has been successfullyapplied in the optimization of irrigation water management(Ma et al., 2006; Li et al., 2007; Haq and Anwar, 2010).Wardlaw and Bhaktikul (2004b) compared GA with linearand integer programming. It has been demonstrated thatGA is a robust and efficient approach to solving distributarycanal scheduling problems.
The Multi-objective Optimization Model (MOM) of canalscheduling has rarely been reported. Scheduling modelsdeveloped by Santhi and Pundarikanthan (2000) andHaq and Anwar (2010) were all solved using weightsmethods. But objectives were often constrained by each
Copyright © 2011 John Wiley & Sons, Ltd.
other. There are many mathematical approaches to solvingMOM (Hwang et al., 1979; Czyzak and Jaszkiewicz,1998; Chen et al., 2010). The basic concept in MOM isthe Pareto front. MOM problems always have more thanone efficient solution, rather than the one solution ofsingle objective optimization models. A set of choices aregiven by the Pareto front, which is particularly useful fordecision making.
Goal
The purpose of this study was to develop a multi-objectiveoptimization model (MOM-GA) for dynamic rotationalcanal scheduling under unequal distributary flow rates,which reports multiple solutions using the Pareto front.The MOM-GA is aimed at minimizing the flow rate fluctua-tions of the superior canal and seepage loss from all canalsin the canal system.
MODEL DESCRIPTION
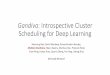
MOM-GA was developed based on certain operationalconditions. Firstly, if an outlet is opened it will stay openuntil its turn is over within a rotation period. Secondly, theflow rates of distributary canals are unequal, and changewithin permitted ranges of the designed discharge. Objectivefunctions and constraints were described to represent thisoptimization process of canal scheduling as a mathematicalprogram. The canal scheduling is described in an X–Y–Zplane in Figure 1. Distributary canals run at different flowrates. Their running time shifts within a rotational periodwith different start and end times. The optimization processcontinues by generating the population of children.
Objective functions
There are two objectives in MOM-GA. The first one is tominimize the flow rate fluctuations of the superior canal.The variance of flow rate at different times was selected toassess the fluctuation (Equation (1)):
Min Z1 ¼ min1
T � 1�XTi¼1
Qsi � Qs
� �2( )
i ¼ 1; 2; . . . ;T
(1)
where
T
= rotation period (h); Qs = the net flow rate of the superior canal at the ithtime, which equals the sum of the flow rates of thedistributary canals (m3 s�¹);
Qs
= the mean of all Qsiwithin a rotation period (m3 s�¹).Irrig. and Drain. (2011)
Z
IG
LG
T0 X
t0j t2j
q j*
t1j
i
Qsi
j
1
N
Y
2
N-1
Irrigation duration
Figure 1. Canal scheduling description: IG = initial generation, LG = last generation
S. Z. PENG ET AL.
Qsi was calculated using Equation (2):
M
Copy
Qsi ¼XNj¼1
q�j �fij xð Þ i ¼ 1; 2; . . . ;T (2)
where
q�j
r
= the flow rate of the jth distributary canal (m3 s‾¹);
N = the number of branch canals in a rotation group.fij(x) is a state variable expressed as Equation (3):
fij xð Þ ¼0;1;0;
i≤t0j;t0j < i≤t2j;i > t2j;
8<: (3)
where
t0j
= the irrigation starting time (h); t2j = the irrigation end time (h).fij(x) is a continuous function to guarantee the canals keeprunning within their rotation periods, once started. fij(x) is1 if i is bigger than t0j and smaller than t2j or equal to t2j.Otherwise, fij(x) is zero.
The second objective is to minimize the seepage losses ofthe superior canal and distributary canals:
inZ2 ¼ Vs þ Vd
¼XTi¼1
Wsi� 1� �sð Þ
þXNj¼1
W�dj� 1� �dj
� �= 1þ 1� �dj
� �h in o(4)
where
ight © 2011 John Wiley & Sons, Ltd.
Vs andVd
= the seepage loss of the superior canal anddistributary canals, respectively (m3)
Wsi
= the net discharge of the superior canal (m3) Wdj�
= the gross discharge to the jth distributary canalfrom the superior canal (m3)�s
= the conveyance efficiency of the superior canalsystem�dj
= the conveyance efficiency of the jth distributarycanal system.Constraints
The multiple objective functions have four constraints—irrigation continuity constraints, discharge constraints, flowrate constraints, and water availability constraints:
(1) Irrigation continuity constraints: The irrigation timeshould be within a rotation period. Meanwhile, theirrigation starting time is greater than zero. Irrigationstarting time plus irrigation time equals irrigationend time:
0≤ t0j≤T j ¼ 1; 2; . . . ;N (5)
t2j≤T j ¼ 1; 2; . . . ;N (6)
t0j þ t1j ¼ t2j j ¼ 1; 2; . . . ;N (7)
where t1j is the irrigation time.
(2) Discharge constraints: The discharge equals flowrate multiplied by irrigation time:
Irrig. and Drain. (2011)
MULTI-OBJECTIVE CANAL SCHEDULING OPTIMIZATION
Copy
Wsi ¼ Qsi�ts�60�60 (8)
W�dj ¼ q�j �t1j�60�60 (9)
where ts is the time step of i. In this study, ts equals 1 h.
(3) Flow rate constraints: The flow rate of each canalshould be close to its designed flow rate to reducedelivery time and satisfy crop water requirementson time. The flow rate of the superior canal shouldnot exceed the maximum capacity flow rate.
a�qj≤q�j ≤b�qj j ¼ 1; 2; . . . ;N (10)
Qsi≤c�Qsd (11)
where
q�j
right © 201
= the designed flow rate of the jth distributarycanal (m3 s‾¹)
Qsd
= the designed flow rate of the superiorcanal (m3 s‾¹)a, b and c are parameters of determining permittedflow rates.
(4) Water availability constraints: The discharge of thesuperior canal should be within the water availabilityfrom the water source:
Wai≥Wsi=�s i ¼ 1; 2; . . . ;T (12)
where
Wai
1
= water availability (m3)
Wsi/�s
= the gross discharge of the superior canal(m3).
Decision variables
Decision variables of MOM-GA include irrigation endtimes (t2j) and flow rates (q�j ) of distributary canals in eachrotation group.
MODEL SOLUTIONS
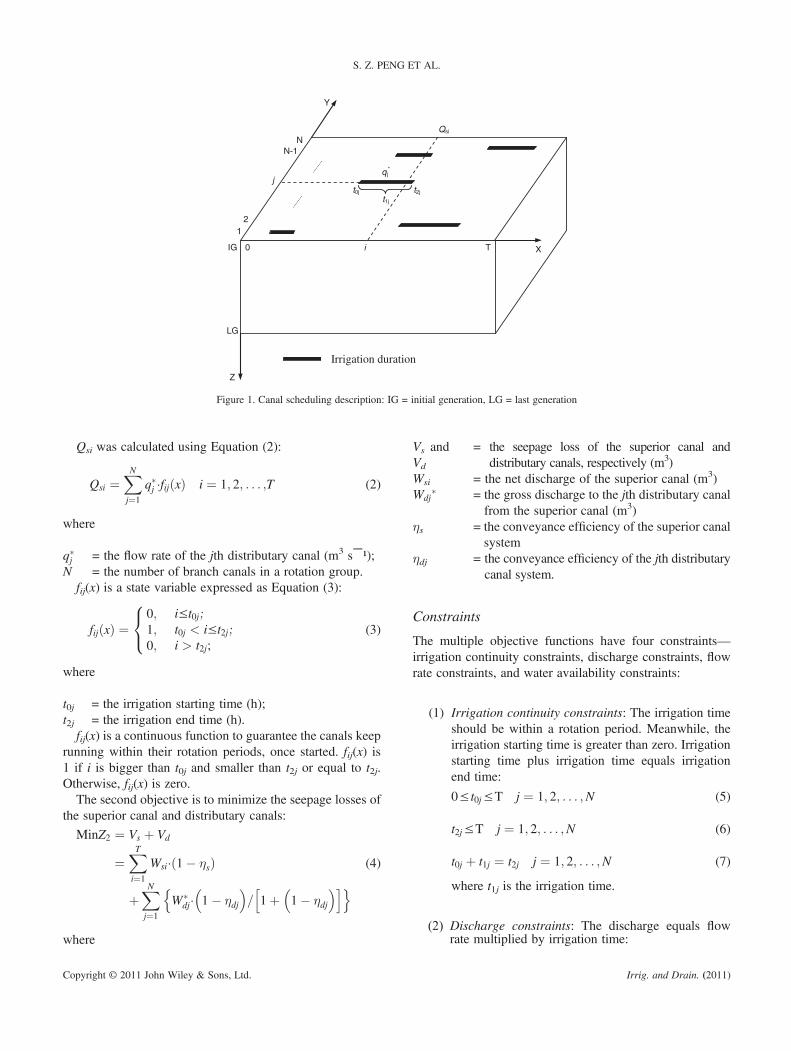
MOM-GA was solved by searching Pareto fronts. Thelogical structure of solutions is presented in Figure 2. Themain program obtains Pareto fronts based on the GAmethod. The main program has a subprogram (known as
Multi-objective functions Penalty function
Fitness function
Figure 2. Logical structure o
John Wiley & Sons, Ltd.
the fitness function), and this function gives feedback tothe main program after fitness estimation. Fitness functionis an estimation function for the generated population. Thehighest fitness brings the greatest chance of contributing tofuture generations, while the lowest level of fitness is madeobsolete, based on the natural selection process of survivalof the fittest. The fitness function was set up based onmulti-objective functions. A penalty function was used fordescribing constraints. Equation (11) was treated as a pen-alty function. Individuals who did not obey this constraintwere assigned a large number (9999) to avoid their traitsbeing inherited by the next generation; otherwise, the fitnessfunction would equal the objective function. Populationswhich do not satisfy the constraints have no chance of beingselected for the next generation. Hence, the penalty functionis an effective way to reduce the unfit population andimprove the searching speed.
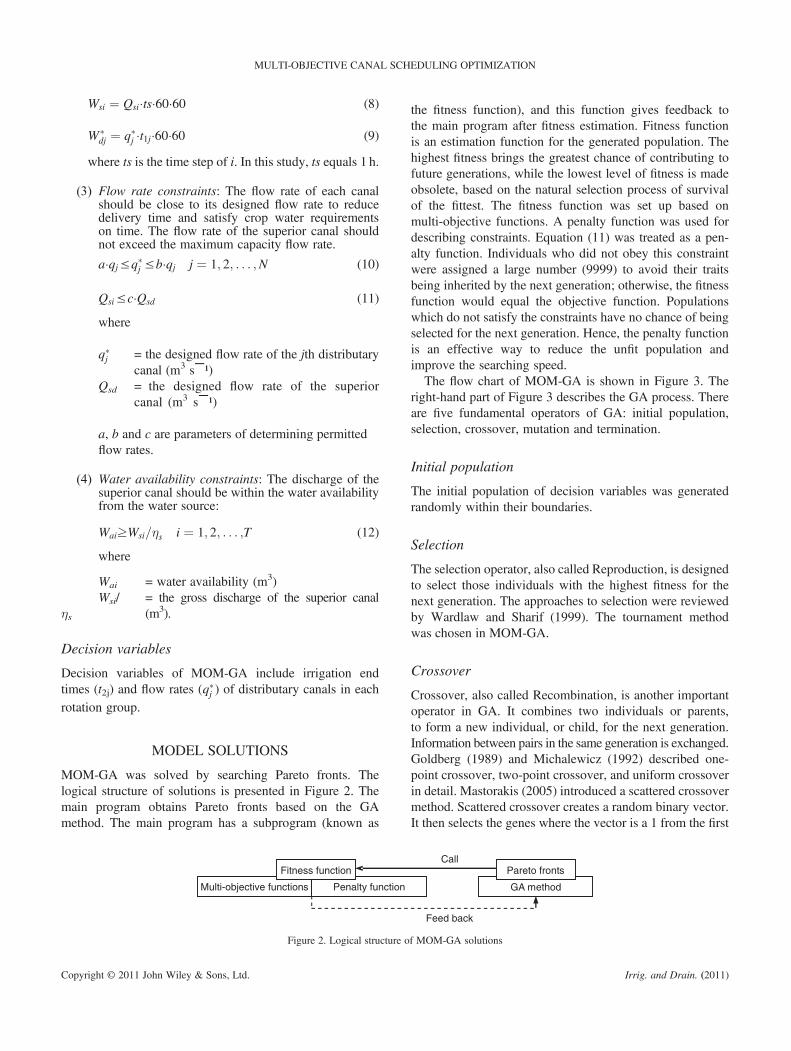
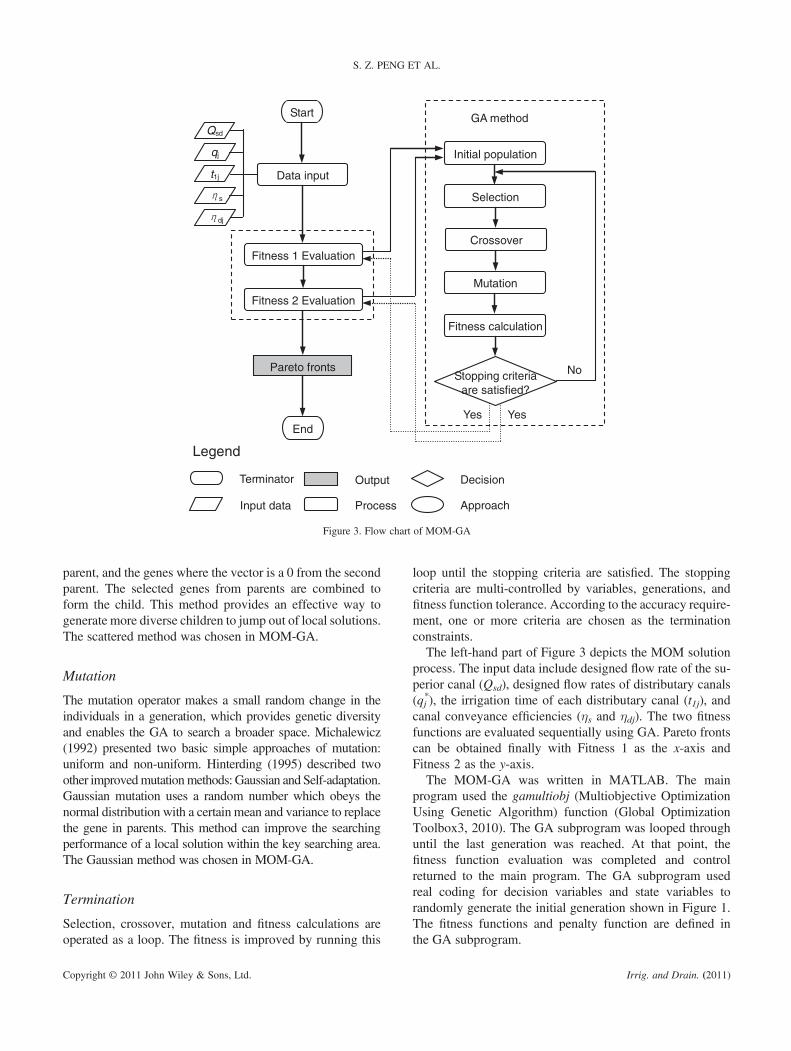
The flow chart of MOM-GA is shown in Figure 3. Theright-hand part of Figure 3 describes the GA process. Thereare five fundamental operators of GA: initial population,selection, crossover, mutation and termination.
Initial population
The initial population of decision variables was generatedrandomly within their boundaries.
Selection
The selection operator, also called Reproduction, is designedto select those individuals with the highest fitness for thenext generation. The approaches to selection were reviewedby Wardlaw and Sharif (1999). The tournament methodwas chosen in MOM-GA.
Crossover
Crossover, also called Recombination, is another importantoperator in GA. It combines two individuals or parents,to form a new individual, or child, for the next generation.Information between pairs in the same generation is exchanged.Goldberg (1989) and Michalewicz (1992) described one-point crossover, two-point crossover, and uniform crossoverin detail. Mastorakis (2005) introduced a scattered crossovermethod. Scattered crossover creates a random binary vector.It then selects the genes where the vector is a 1 from the first
GA method
Pareto frontsCall
Feed back
f MOM-GA solutions
Irrig. and Drain. (2011)
Input data
Terminator
Process
Decision
Legend
Output
Approach
End
Start
Pareto fronts
Fitness 1 Evaluation
Fitness 2 Evaluation
Data input
Qsd
t1j
dj
qj
s
Initial population
Selection
Crossover
Mutation
Fitness calculation
Stopping criteriaare satisfied?
No
GA method
YesYes
Figure 3. Flow chart of MOM-GA
S. Z. PENG ET AL.
parent, and the genes where the vector is a 0 from the secondparent. The selected genes from parents are combined toform the child. This method provides an effective way togenerate more diverse children to jump out of local solutions.The scattered method was chosen in MOM-GA.
Mutation
The mutation operator makes a small random change in theindividuals in a generation, which provides genetic diversityand enables the GA to search a broader space. Michalewicz(1992) presented two basic simple approaches of mutation:uniform and non-uniform. Hinterding (1995) described twoother improvedmutationmethods: Gaussian and Self-adaptation.Gaussian mutation uses a random number which obeys thenormal distribution with a certain mean and variance to replacethe gene in parents. This method can improve the searchingperformance of a local solution within the key searching area.The Gaussian method was chosen in MOM-GA.
Termination
Selection, crossover, mutation and fitness calculations areoperated as a loop. The fitness is improved by running this
Copyright © 2011 John Wiley & Sons, Ltd.
loop until the stopping criteria are satisfied. The stoppingcriteria are multi-controlled by variables, generations, andfitness function tolerance. According to the accuracy require-ment, one or more criteria are chosen as the terminationconstraints.
The left-hand part of Figure 3 depicts the MOM solutionprocess. The input data include designed flow rate of the su-perior canal (Qsd), designed flow rates of distributary canals(qj
*), the irrigation time of each distributary canal (t1j), andcanal conveyance efficiencies (�s and �dj). The two fitnessfunctions are evaluated sequentially using GA. Pareto frontscan be obtained finally with Fitness 1 as the x-axis andFitness 2 as the y-axis.
The MOM-GA was written in MATLAB. The mainprogram used the gamultiobj (Multiobjective OptimizationUsing Genetic Algorithm) function (Global OptimizationToolbox3, 2010). The GA subprogram was looped throughuntil the last generation was reached. At that point, thefitness function evaluation was completed and controlreturned to the main program. The GA subprogram usedreal coding for decision variables and state variables torandomly generate the initial generation shown in Figure 1.The fitness functions and penalty function are defined inthe GA subprogram.
Irrig. and Drain. (2011)
MULTI-OBJECTIVE CANAL SCHEDULING OPTIMIZATION
MODEL APPLICATION
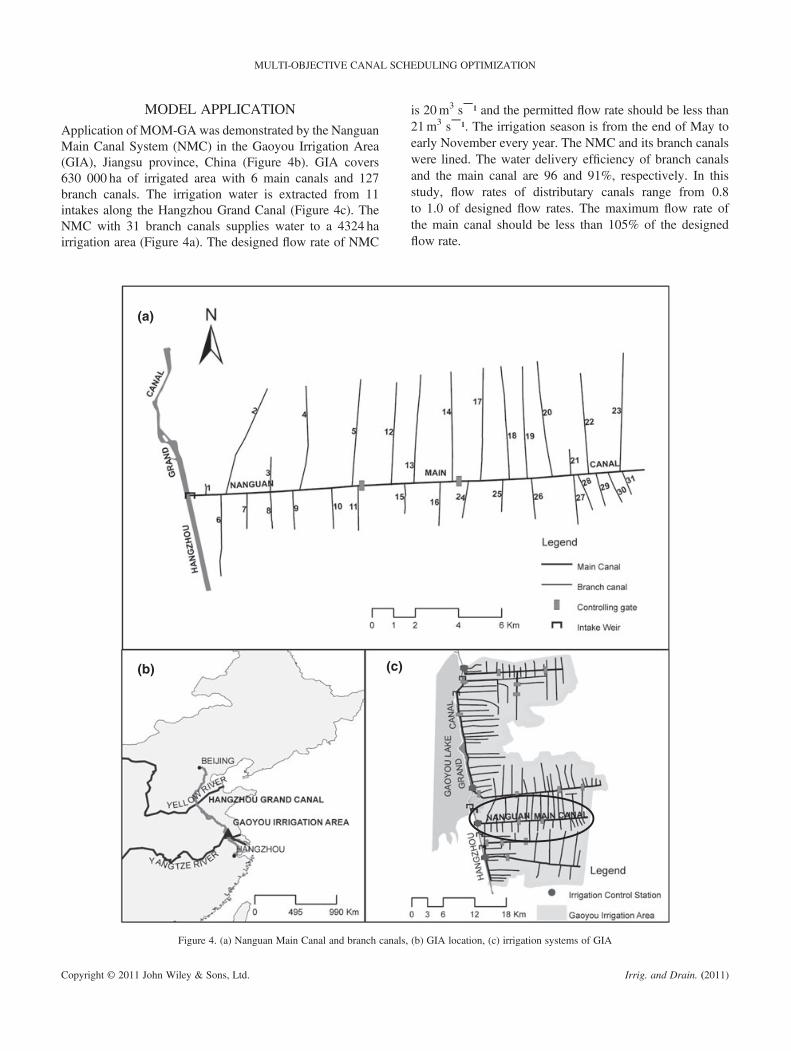
Application of MOM-GA was demonstrated by the NanguanMain Canal System (NMC) in the Gaoyou Irrigation Area(GIA), Jiangsu province, China (Figure 4b). GIA covers630 000 ha of irrigated area with 6 main canals and 127branch canals. The irrigation water is extracted from 11intakes along the Hangzhou Grand Canal (Figure 4c). TheNMC with 31 branch canals supplies water to a 4324 hairrigation area (Figure 4a). The designed flow rate of NMC
(b) (c)
(a)
Figure 4. (a) Nanguan Main Canal and branch canals,
Copyright © 2011 John Wiley & Sons, Ltd.
is 20m3 s‾¹ and the permitted flow rate should be less than21m3 s‾¹. The irrigation season is from the end of May toearly November every year. The NMC and its branch canalswere lined. The water delivery efficiency of branch canalsand the main canal are 96 and 91%, respectively. In thisstudy, flow rates of distributary canals range from 0.8to 1.0 of designed flow rates. The maximum flow rate ofthe main canal should be less than 105% of the designedflow rate.
(b) GIA location, (c) irrigation systems of GIA
Irrig. and Drain. (2011)
S. Z. PENG ET AL.
The fitness functions of MOM-GA are shown in Equations(13) and (14):
Table
Varia
CN*
*CN
Figur
Copy
Fitness 1 ¼ 1T � 1
�XTi¼1
Qsi � �Qs½ �2( )
i ¼ 1; 2; . . . ;T
(13)
Fitness 2 ¼XTi¼1
Qsi i ¼ 1; 2; . . . ;T (14)
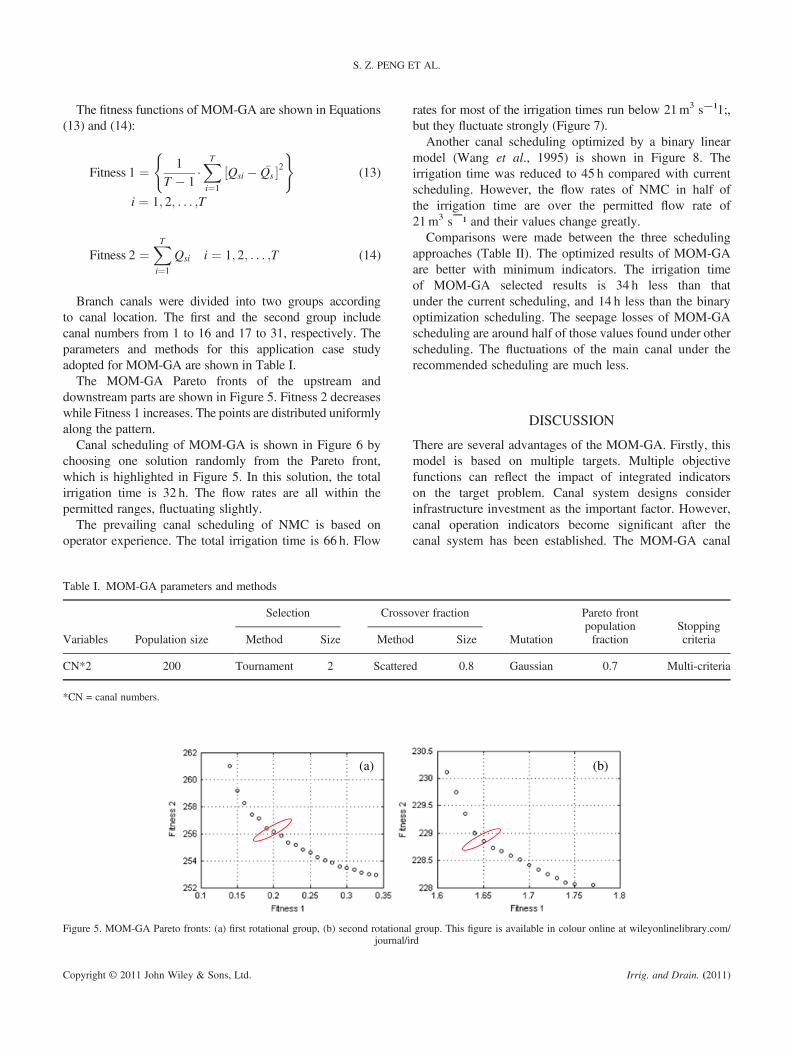
Branch canals were divided into two groups accordingto canal location. The first and the second group includecanal numbers from 1 to 16 and 17 to 31, respectively. Theparameters and methods for this application case studyadopted for MOM-GA are shown in Table I.
The MOM-GA Pareto fronts of the upstream anddownstream parts are shown in Figure 5. Fitness 2 decreaseswhile Fitness 1 increases. The points are distributed uniformlyalong the pattern.
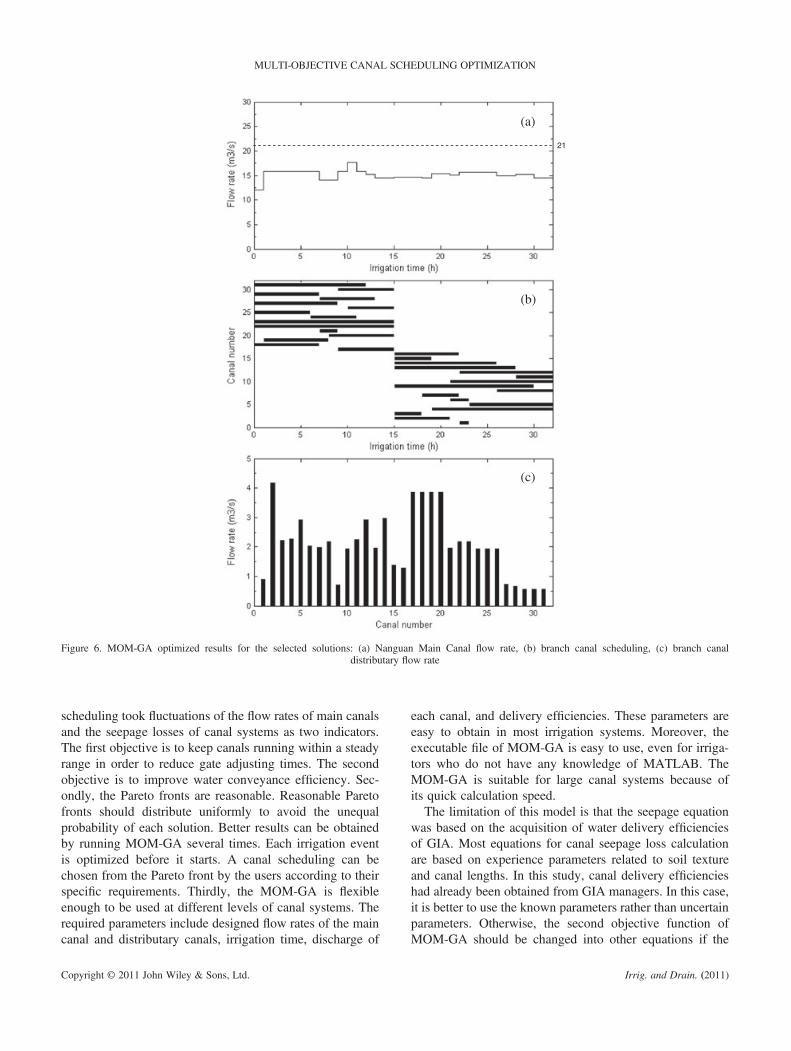
Canal scheduling of MOM-GA is shown in Figure 6 bychoosing one solution randomly from the Pareto front,which is highlighted in Figure 5. In this solution, the totalirrigation time is 32 h. The flow rates are all within thepermitted ranges, fluctuating slightly.
The prevailing canal scheduling of NMC is based onoperator experience. The total irrigation time is 66 h. Flow
I. MOM-GA parameters and methods
bles Population size
Selection Crosso
Method Size Method
2 200 Tournament 2 Scattere
= canal numbers.
(a)
e 5. MOM-GA Pareto fronts: (a) first rotational group, (b) second rotationajournal/i
right © 2011 John Wiley & Sons, Ltd.
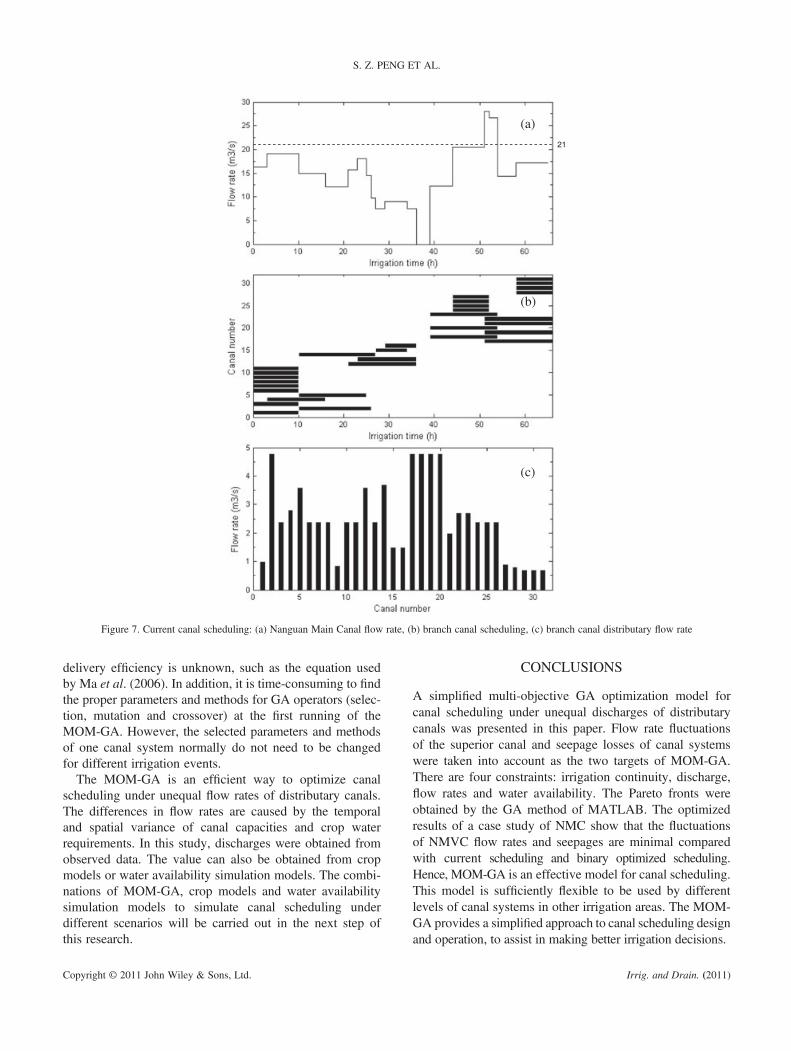
rates for most of the irrigation times run below 21m3 s�¹1;,but they fluctuate strongly (Figure 7).
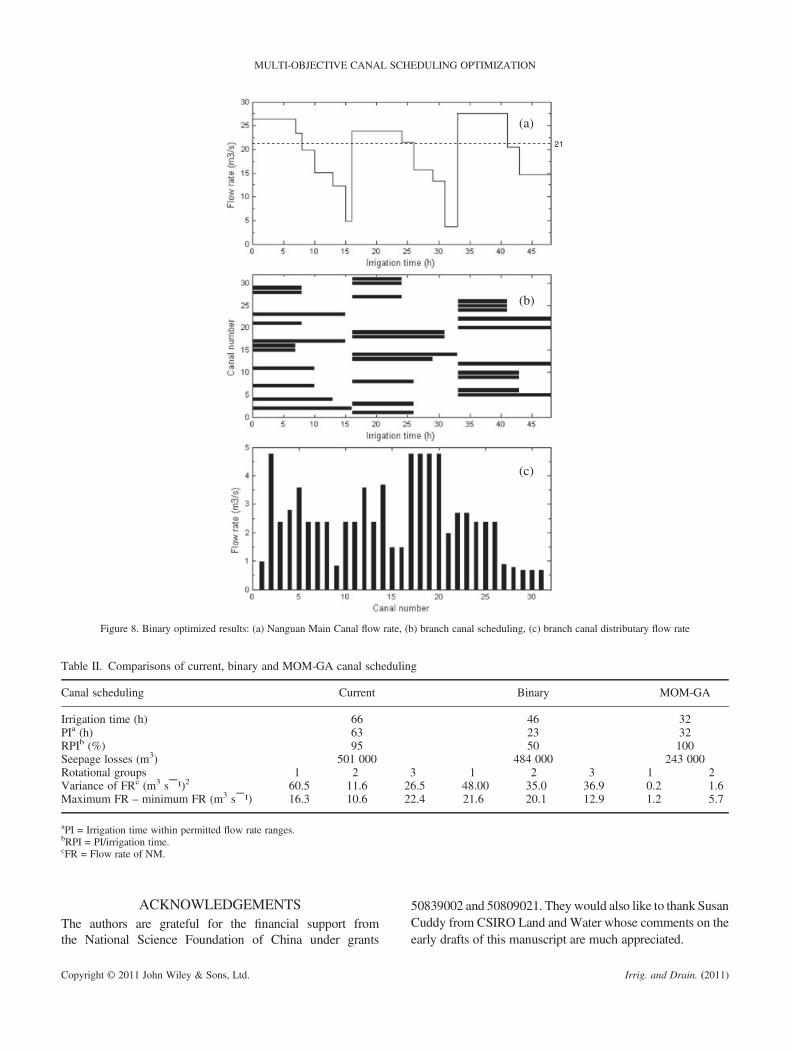
Another canal scheduling optimized by a binary linearmodel (Wang et al., 1995) is shown in Figure 8. Theirrigation time was reduced to 45 h compared with currentscheduling. However, the flow rates of NMC in half ofthe irrigation time are over the permitted flow rate of21m3 s‾¹ and their values change greatly.
Comparisons were made between the three schedulingapproaches (Table II). The optimized results of MOM-GAare better with minimum indicators. The irrigation timeof MOM-GA selected results is 34 h less than thatunder the current scheduling, and 14 h less than the binaryoptimization scheduling. The seepage losses of MOM-GAscheduling are around half of those values found under otherscheduling. The fluctuations of the main canal under therecommended scheduling are much less.
DISCUSSION
There are several advantages of the MOM-GA. Firstly, thismodel is based on multiple targets. Multiple objectivefunctions can reflect the impact of integrated indicatorson the target problem. Canal system designs considerinfrastructure investment as the important factor. However,canal operation indicators become significant after thecanal system has been established. The MOM-GA canal
ver fraction
Mutation
Pareto frontpopulationfraction
StoppingcriteriaSize
d 0.8 Gaussian 0.7 Multi-criteria
(b)
l group. This figure is available in colour online at wileyonlinelibrary.com/rd
Irrig. and Drain. (2011)
(a)
(b)
(c)
21
Figure 6. MOM-GA optimized results for the selected solutions: (a) Nanguan Main Canal flow rate, (b) branch canal scheduling, (c) branch canaldistributary flow rate
MULTI-OBJECTIVE CANAL SCHEDULING OPTIMIZATION
scheduling took fluctuations of the flow rates of main canalsand the seepage losses of canal systems as two indicators.The first objective is to keep canals running within a steadyrange in order to reduce gate adjusting times. The secondobjective is to improve water conveyance efficiency. Sec-ondly, the Pareto fronts are reasonable. Reasonable Paretofronts should distribute uniformly to avoid the unequalprobability of each solution. Better results can be obtainedby running MOM-GA several times. Each irrigation eventis optimized before it starts. A canal scheduling can bechosen from the Pareto front by the users according to theirspecific requirements. Thirdly, the MOM-GA is flexibleenough to be used at different levels of canal systems. Therequired parameters include designed flow rates of the maincanal and distributary canals, irrigation time, discharge of
Copyright © 2011 John Wiley & Sons, Ltd.
each canal, and delivery efficiencies. These parameters areeasy to obtain in most irrigation systems. Moreover, theexecutable file of MOM-GA is easy to use, even for irriga-tors who do not have any knowledge of MATLAB. TheMOM-GA is suitable for large canal systems because ofits quick calculation speed.
The limitation of this model is that the seepage equationwas based on the acquisition of water delivery efficienciesof GIA. Most equations for canal seepage loss calculationare based on experience parameters related to soil textureand canal lengths. In this study, canal delivery efficiencieshad already been obtained from GIA managers. In this case,it is better to use the known parameters rather than uncertainparameters. Otherwise, the second objective function ofMOM-GA should be changed into other equations if the
Irrig. and Drain. (2011)
21
(a)
(b)
(c)
Figure 7. Current canal scheduling: (a) Nanguan Main Canal flow rate, (b) branch canal scheduling, (c) branch canal distributary flow rate
S. Z. PENG ET AL.
delivery efficiency is unknown, such as the equation usedby Ma et al. (2006). In addition, it is time-consuming to findthe proper parameters and methods for GA operators (selec-tion, mutation and crossover) at the first running of theMOM-GA. However, the selected parameters and methodsof one canal system normally do not need to be changedfor different irrigation events.
The MOM-GA is an efficient way to optimize canalscheduling under unequal flow rates of distributary canals.The differences in flow rates are caused by the temporaland spatial variance of canal capacities and crop waterrequirements. In this study, discharges were obtained fromobserved data. The value can also be obtained from cropmodels or water availability simulation models. The combi-nations of MOM-GA, crop models and water availabilitysimulation models to simulate canal scheduling underdifferent scenarios will be carried out in the next step ofthis research.
Copyright © 2011 John Wiley & Sons, Ltd.
CONCLUSIONS
A simplified multi-objective GA optimization model forcanal scheduling under unequal discharges of distributarycanals was presented in this paper. Flow rate fluctuationsof the superior canal and seepage losses of canal systemswere taken into account as the two targets of MOM-GA.There are four constraints: irrigation continuity, discharge,flow rates and water availability. The Pareto fronts wereobtained by the GA method of MATLAB. The optimizedresults of a case study of NMC show that the fluctuationsof NMVC flow rates and seepages are minimal comparedwith current scheduling and binary optimized scheduling.Hence, MOM-GA is an effective model for canal scheduling.This model is sufficiently flexible to be used by differentlevels of canal systems in other irrigation areas. The MOM-GA provides a simplified approach to canal scheduling designand operation, to assist in making better irrigation decisions.
Irrig. and Drain. (2011)
21
(a)
(b)
(c)
Figure 8. Binary optimized results: (a) Nanguan Main Canal flow rate, (b) branch canal scheduling, (c) branch canal distributary flow rate
Table II. Comparisons of current, binary and MOM-GA canal scheduling
Canal scheduling Current Binary MOM-GA
Irrigation time (h) 66 46 32PIa (h) 63 23 32RPIb (%) 95 50 100Seepage losses (m3) 501 000 484 000 243 000Rotational groups 1 2 3 1 2 3 1 2Variance of FRc (m3 s‾¹)2 60.5 11.6 26.5 48.00 35.0 36.9 0.2 1.6Maximum FR – minimum FR (m3 s‾¹) 16.3 10.6 22.4 21.6 20.1 12.9 1.2 5.7
aPI = Irrigation time within permitted flow rate ranges.bRPI = PI/irrigation time.cFR = Flow rate of NM.
MULTI-OBJECTIVE CANAL SCHEDULING OPTIMIZATION
ACKNOWLEDGEMENTSThe authors are grateful for the financial support fromthe National Science Foundation of China under grants
Copyright © 2011 John Wiley & Sons, Ltd.
50839002 and 50809021. They would also like to thank SusanCuddy from CSIRO Land andWater whose comments on theearly drafts of this manuscript are much appreciated.
Irrig. and Drain. (2011)

S. Z. PENG ET AL.
REFERENCES
Alvarez LF. 2000. Design optimization based on genetic programming.PhD thesis, University of Bradford, UK.
Anwar AA, Clarke D. 2001. Irrigation scheduling using mixed-integerlinear programming. Journal of Irrigation and Drainage Engineering,ASCE 127(2): 63–69.
Arif AA, Derek C, Tonny TV. 2006. Channel capacity under arrangeddemand irrigation. Agricultural Water Management 82: 148–160.
Bhadra A, Bandyopadhyay A, Singh R, Raghuwanshi NS. 2010. Analternative rotational delivery schedule for improved performance ofreservoir-based canal irrigation system. Water Resources Management24: 3679–3700.
Chambers R. 1988. Managing Canal Irrigation: Practical Analysis fromSouth Asia. Cambridge University Press: Cambridge, England.
Chen Y, Khan S, Paydar Z. 2010. A fuzzy GIS-based spatial multi-criteriaevaluation framework for irrigated agriculture. Irrigation and Drainage59(2): 174–188.
Czyzak P, Jaszkiewicz A. 1998. Pareto simulated annealing—a metaheuristictechnique for multiple-objective combinatorial optimization. Journal ofMulti-Criteria Decision Analysis 7(1): 34–47.
Farmani R, Abadia R, Savic D. 2007. Optimum design and managementof pressurized branched irrigation networks. Journal of Irrigation andDrainage Engineering 133: 528–537.
Global Optimization Toolbox3. 2010. User’s Guide. http://www.math-works.com/help/releases/R13sp2/pdf_doc/gads/gads_tb.pdf.
Goldberg DE. 1989. Genetic Algorithms in Search Optimization andMachine Learning. Addison-Wesley: Reading, Mass.
Haq ZU, Anwar AA. 2010. Irrigation scheduling with genetic algorithms.Journal of Irrigation and Drainage Engineering 136: 704–714.
Hinterding R. 1995. Gaussian Mutation and Self-Adaptation for NumericGenetic Algorithms. IEEE: Perth, Australia; 384 pp.
Hwang CL, Masud ASM, Paidy SR. 1979. Multiple Objective DecisionMaking, Methods and Applications: a State-of-the-Art Survey. Springer:Berlin, New York.
Khan S, Rana T, Cui YL, Blackwell J. 2006. Can irrigation be sustainable?Agricultural Water Management 80(1–3): 87–99.
Li B, Jin Z, Zhai Z. 2007. Study on optimization model for unequal outletflow in irrigation channel system. Journal of Irrigation and Drainage26: 44–46, in Chinese.
Li Y, Yuan H. 1994. Real-time operation scheduling of canal system withrotational irrigation. In Proceedings International Conference on IrrigationManagement Transfer, Wuhan, China.
Liu Z. 2006. Research of optimal water delivery schedule model forirrigation canal system and its algorithm. Northwest Agriculture andForestry University, Yangling; 1 p.
Ma X, Liu Z, Gan X. 2006. Optimal water delivery scheduling model andalgorithm under unequal discharges lateral channels. Journal of Irrigationand Drainage 25(5): 17–20, in Chinese.
Mandavia AB, Acharya KD. 1995. Canal hydraulics and hydraulicsimulation by mathematical models. InWater and Energy. Central Boardof Irrigation and Power (CBIP): Delhi, India; 552–568.
Copyright © 2011 John Wiley & Sons, Ltd.
Mastorakis NE. 2005. Genetic algorithms and Nelder-Mead Methodfor the solution of boundary value problems with the collocationmethod. WSEAS Transactions on Information Science and Applications2(11): 2016–2020.
Mateos L, López-Cortijo I, Sagardoy JA. 2002. SIMIS: the FAO decisionsupport system for irrigation scheme management. Agricultural WaterManagement 56(3): 193–206.
Michalewicz Z. 1992. Genetic Algorithms + Data Structures =EvolutionPrograms. Springer: New York.
Mishra A, Singh R, Raghuwanshi NS. 2002. Alternative delivery schedulingfor improved canal system performance. Journal of Irrigation andDrainage Engineering 128: 244–248.
Nathalie MB, Désidéri JA. 1999. Numerical Solution of Optimization Test-Cases by Genetic Algorithms, Version 2. Information Automatic NationalInstitute Research: Lyon, France.
Paydar Z, Gaydon D, Chen Y. 2009. A methodology for up-scalingirrigation losses. Irrigation Science 27(5): 347–356.
Pulido-Calvo I, Roldan J, Lopez-Luque R, Gutierrez-Estrada JC. 2003.Water delivery system planning considering irrigation simultaneity.Journal of Irrigation and Drainage Engineering, ASCE 129(4):247–255.
Rajput TBS, Michael AM. 1989. Scheduling of canal deliveries I. Develop-ment of an integrated canal scheduling model. Irrigation and Power 46(2): 23–39.
Reddy JM, Wilamowski B, Cassel-Sharmasarkar FC. 1999. Optimalscheduling of irrigation for lateral canals. International Commissionon Irrigation and Drainage (ICID) Journal (Irrigation and Drainage)48(3): 1–2.
Santhi C, Pundarikanthan NV. 2000. A new planning model for canalscheduling of rotational irrigation. Agricultural Water Management43(3): 327–343.
Suryavanshi AR, Reddy JM. 1986. Optimal operation schedule of irrigationdistribution systems. Agriculture Water Management 11(1): 23–30.
Vedula S, Ramesh TSV, Mujumdar PP. 1993. Real-time irrigationscheduling. In International Conference on Environmentally SoundWater Resources Utilisation, Bangkok, Thailand; 25–31.
Vyas SK, Sarma PBS. 1992. An analytical model for estimation offlows at various locations in a canal command area. Irrigation &Power: the Journal of the Central Board of Irrigation & Power48(1): 125–137.
Wang Z, Reddy JM, Feyen J. 1995. Improved 0–1 programming model foroptimal flow scheduling in irrigation canals. Irrigation and DrainageSystems 9: 105–116.
Wardlaw R, Bhaktikul K. 2004a. Application of genetic algorithmsfor irrigation water scheduling. Irrigation and Drainage 53(4):397–414.
Wardlaw R, Bhaktikul K. 2004b. Comparison of genetic algorithm andlinear programming approaches for lateral canal scheduling. Journal ofIrrigation and Drainage Engineering, ASCE 130(4): 311–317.
Wardlaw R, Sharif M. 1999. Evaluation of genetic algorithms for optimalreservoir system operation. Journal of Water Resources Planning andManagement 125(1): 25–33.
Irrig. and Drain. (2011)