Embed Size (px)
Citation preview

Algèbre linéaire - 2année universitaire 2018-2019
Université de Lorraine
Pierre-Emmanuel Chaput

2
Ce polycopié est très largement inspiré du polycopié utilisé par mon prédecesseur J.F. Gros-jean, que je remercie pour son travail de rédaction.

Table des matières
1 Déterminants 51.1 Permutations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.1.1 Définitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.1.2 Signature d’une permutation . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.2 Applications multilinéaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.2.1 Définitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.2.2 Applications multilinéaires alternées . . . . . . . . . . . . . . . . . . . . . 8
1.3 Définition du déterminant et premières propriétés . . . . . . . . . . . . . . . . . . 111.3.1 Déterminant d’une famille de n-vecteurs . . . . . . . . . . . . . . . . . . . 111.3.2 Déterminant d’un endomorphisme . . . . . . . . . . . . . . . . . . . . . . 121.3.3 Déterminant d’une matrice . . . . . . . . . . . . . . . . . . . . . . . . . . 141.3.4 Déterminant des matrices carrées 2× 2 . . . . . . . . . . . . . . . . . . . . 151.3.5 Matrices transposées . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161.3.6 Opérations sur les lignes et les colonnes . . . . . . . . . . . . . . . . . . . 17
1.4 Développement d’un déterminant . . . . . . . . . . . . . . . . . . . . . . . . . . . 181.4.1 Cofacteurs et comatrices . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181.4.2 Matrices triangulaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211.4.3 Matrices inverses et déterminant . . . . . . . . . . . . . . . . . . . . . . . 22
1.5 Formules de Cramer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241.6 Rang d’une matrice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2 Réduction des endomorphismes 272.1 Sous-espaces propres et diagonalisation . . . . . . . . . . . . . . . . . . . . . . . . 27
2.1.1 Valeurs propres, vecteurs propres . . . . . . . . . . . . . . . . . . . . . . . 272.1.2 Sous-espaces propres . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 312.1.3 Endomorphismes et matrices diagonalisables . . . . . . . . . . . . . . . . . 322.1.4 Calcul des puissances d’une matrice . . . . . . . . . . . . . . . . . . . . . 35
2.2 Trigonalisation et théorème de Cayley-Hamilton . . . . . . . . . . . . . . . . . . . 352.2.1 Endomorphismes trigonalisables . . . . . . . . . . . . . . . . . . . . . . . . 352.2.2 Polynômes d’endomorphismes . . . . . . . . . . . . . . . . . . . . . . . . . 392.2.3 Théorème de Cayley-Hamilton . . . . . . . . . . . . . . . . . . . . . . . . 40
2.3 Polynôme minimal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 422.3.1 Théorème de décomposition des noyaux . . . . . . . . . . . . . . . . . . . 42
3

4 TABLE DES MATIÈRES
2.3.2 Polynômes annulateurs, polynôme minimal . . . . . . . . . . . . . . . . . 432.4 Projecteurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 472.5 Sous-espaces caractéristiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
2.5.1 Indice d’un endomorphisme et endomorphismes nilpotents . . . . . . . . . 502.5.2 Sous-espaces caractéristiques . . . . . . . . . . . . . . . . . . . . . . . . . 532.5.3 Décomposition de Dunford-Jordan . . . . . . . . . . . . . . . . . . . . . . 55
2.6 Applications et exemples : suites récurrentes . . . . . . . . . . . . . . . . . . . . . 572.6.1 Calcul des puissances d’un endomorphisme . . . . . . . . . . . . . . . . . 572.6.2 Une méthode de trigonalisation . . . . . . . . . . . . . . . . . . . . . . . . 582.6.3 Suites récurrentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
3 Systèmes différentiels linéaires 633.1 Exponentielle d’une matrice ou d’un endomorphisme . . . . . . . . . . . . . . . . 63
3.1.1 Espaces vectoriels normés . . . . . . . . . . . . . . . . . . . . . . . . . . . 633.1.2 Norme sur l’espace des endomorphismes et sur les matrices . . . . . . . . 653.1.3 Dérivabilité et intégration des fonctions à variable réelle et à valeurs dans
un espace vectoriel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 673.1.4 Exponentielle d’une matrice . . . . . . . . . . . . . . . . . . . . . . . . . . 68
3.2 Calcul pratique de l’exponentielle d’une matrice . . . . . . . . . . . . . . . . . . . 723.3 Systèmes différentiels linéaires à coefficients constants . . . . . . . . . . . . . . . 74
3.3.1 Système différentiel linéaire homogène . . . . . . . . . . . . . . . . . . . . 753.3.2 Système différentiel linéaire non homogène . . . . . . . . . . . . . . . . . . 77
3.4 Équations différentielles linéaires . . . . . . . . . . . . . . . . . . . . . . . . . . . 78

Chapitre 1
Déterminants
1.1 Permutations
1.1.1 Définitions
Définition 1.1 Une permutation de l’ensemble Fn = {1, ..., n} est une bijection de Fn sur Fn.
On notera Sn l’ensemble des permutations.
Remarque 1.2 La donnée d’un élément σ de Sn est définie par les données successives deσ(1) ∈ Fn, σ(2) ∈ Fn \ {σ(1)}, · · · , σ(n) ∈ Fn \ {σ(1), · · · , σ(n− 1)}.
On en déduit que card (Sn) = n!.
Exercice de cours 1.1 Combien y a-t-il d’éléments dans S3 ? Donner la liste des éléments deS3.
Remarque 1.3 Sn muni de la loi de composition ◦ est un groupe. En effet ◦ est une loi interne.En effet si (σ, σ′) ∈ S2
n, alors σ ◦ σ′ ∈ Sn car la composée de deux bijections est une bijection.La loi ◦ est associative. En effet si (σ, σ′, σ′′) ∈ S3
n, alors on a évidemment (σ ◦ σ′) ◦ σ′′ =σ ◦ (σ′ ◦ σ′′).
L’application identité notée id (id(k) = k pour tout k ∈ Fn) est une permutation de Fn et estl’élément neutre pour ◦. Pour tout σ ∈ Sn on a σ ◦ Id = Id ◦ σ = σ.
Tout élément σ de Sn admet un inverse qui n’est rien d’autre que la bijection réciproque σ−1.
Définition 1.4 Sn muni de la loi ◦ s’appelle le groupe des permutations ou groupe sy-métrique.
Exemples de permutations: Soit F4 = {1, 2, 3, 4} et soit σ ∈ S4 définie par : σ(1) = 4,σ(2) = 3, σ(3) = 1 et σ(4) = 2. On écrira alors :
σ =
(1 2 3 44 3 1 2
)
5

6 CHAPITRE 1. DÉTERMINANTS
Définition 1.5 On suppose que n > 2. Pour tout (i, j) ∈ F 2n tel que i < j, on appelle transpo-
sition échangeant i et j et on note τij la permutation de Fn définie par τij(i) = j, τij(j) = i etτij(k) = k, pour tout k ∈ Fn \ {i, j}.
On écrira aussi τij = (i, j).
Exemple 1.6 τ =
(1 2 3 44 2 3 1
)est une transposition et on a τ = (1, 4).
Nous admettons maintenant le théorème suivant qui nous sera utile par la suite.
prod Théorème 1.7 Tout élément de Sn est produit de transpositions.
1.1.2 Signature d’une permutation
Définition 1.8 Soient σ ∈ Sn et (i, j) ∈ F 2n . On dit que le couple (i, j) présente une inversion
pour σ (ou est une inversion de σ) si : i < j et σ(i) > σ(j).
Le nombre d’inversions d’une permutation σ est noté `(σ).
perm-l5 Exemple 1.9 Considérons σ =
(1 2 3 44 3 1 2
). Les couples (1, 2), (1, 3), (1, 4), (2, 3), (2, 4),
sont des inversions de σ. En revanche (3, 4) n’est pas une inversion. Donc `(σ) = 5.
Remarque 1.10 La permutation Id ne possédant aucune inversion, on a `(Id) = 0.
Exercice de cours 1.2 Montrer que pour tout σ ∈ S4, on a `(σ) ≤ 6. Existe-t-il une permuta-tion σ ∈ S4 telle que `(σ) = 6 ? Les trouver toutes.
Exercice de cours 1.3 Soit σ la permutation de l’exempleperm-l51.9. Vérifier le Théorème
prod1.7 pour
σ en écrivant σ comme produit de cinq transpositions de la forme (i, i+ 1) avec i ∈ {1, 2, 3}.On pourra utiliser le fait que pour toute permutation σ′, si σ′(i) > σ′(i+1), alors `(σ′ ◦ (i, i+
1)) = `(σ′) − 1, et trouver ainsi des entiers i1, i2, i3, i4, i5 tels que `(σ ◦ (i1, i1 + 1)) = `(σ) − 1,`(σ ◦ (i1, i1 + 1) ◦ (i2, i2 + 1)) = `(σ ◦ (i1, i1 + 1)) − 1, et ainsi de suite. On observera alors queσ◦(i1, i1+1)◦(i2, i2+1)◦(i3, i3+1)◦(i4, i4+1)◦(i5, i5+1) est de longueur 0, donc est l’élémentneutre.
Pour les plus courageux, on pourra démontrer l’affirmation selon laquelle si σ′(i) > σ′(i+ 1),alors `(σ′ ◦ (i, i+ 1)) = `(σ′)− 1.
Définition 1.11 On appelle signature de σ ∈ Sn, le nombre ε(σ) = (−1)`(σ).
Remarque 1.12 ε(σ) ∈ {−1, 1}.
Définition 1.13 Soit σ ∈ Sn. On dit que σ est paire si ε(σ) = 1 et σ est impaire si ε(σ) = −1.

1.2. APPLICATIONS MULTILINÉAIRES 7
perm Théorème 1.14 Soient σ, σ′ ∈ Sn. Alors :1. ε(σ ◦ σ′) = ε(σ)ε(σ′).2. ε(σ−1) = ε(σ).
Proposition 1.15 Soit τ une transposition de Sn. Alors τ est impaire.
Exercice de cours 1.4 Montrer que la transposition (2, 4), dans S5, est de longueur 3, doncque cette transposition est bien impaire.
1.2 Applications multilinéaires
Dans toute la suite, K désigne le corps des réels ou des complexes.
1.2.1 Définitions
Définition 1.16 Soient E et F deux espaces vectoriels sur K. On dit que l’application :
f : Ep = E × · · · × E −→ F(x1, · · · , xp) 7−→ f(x1, · · · , xp)
est une application multilinéaire ou p-linéaire si pour tout i compris entre 1 et p et pourtous vecteurs x1,...,xi−1, xi+1,...,xp fixés, l’application :
x 7−→ f(x1, · · · , xi−1, x, xi+1, · · · , xp)
est une application linéaire de E dans F . Si de plus F = K, on dit que f est une forme p-linéaire.
Autrement dit on a pour tous vecteurs x et y de E :f(x1, · · · , xi−1, λx+ µy, xi+1, · · · , xp) =
λf(x1, · · · , xi−1, x, xi+1, · · · , xp) + µf(x1, · · · , xi−1, y, xi+1, · · · , xp)
Exercice de cours 1.5 Soit E = R2 et F = R3, et soit p = 2. Montrer que l’application
f : E2 = R2 × R2 −→ R3
((x1, y1), (x2, y2)) 7−→ (0, x1y2 − y1x2, 0)(1.1) equa:f
est bilinéaire, mais pas celle définie de façon similaire par le vecteur (0, x1y1 − x2y2, 0).
multi Remarque 1.17 Notons Lp(E,F ) l’ensemble des applications p-linéaires de E dans F . Étantdonné λ ∈ K, f, g ∈ Lp(E,F ), on peut définir les deux opérations suivantes :
1. (f + g)(x1, · · · , xp) = f(x1, · · · , xp) + g(x1, · · · , xp).2. (λf)(x1, · · · , xp) = λf(x1, · · · , xp).
Alors il est facile de vérifier que Lp(E,F ) muni de ces deux opérations est unsagemath weyl groupelements espace vectoriel sur K.

8 CHAPITRE 1. DÉTERMINANTS
1.2.2 Applications multilinéaires alternées
alter Définition 1.18 Soient E et F deux espaces vectoriels sur K et v : Ep = E × · · · × E −→ Fune application multilinéaire. On dit que v est alternée si pour tout couple (i, j) ∈ F 2
p tel quei 6= j et pour tout (x1, · · ·xp) ∈ Ep :
xi = xj implique v(x1, · · · , xp) = 0
Exercice de cours 1.6 Montrer que l’application f définie par (equa:f1.1) est alternée.
alterne Proposition 1.19 Si v : Ep = E × · · · × E −→ F est une application multilinéaire alternée,alors pour tout couple (i, j) ∈ {1, . . . , p}2 tel que i < j, on a :
v(x1, . . . , xi, . . . , xj , . . . , xp) = −v(x1, . . . , xj , . . . , xi, . . . , xp)
Preuve: Comme v est multilinéaire et alternée on a :
0 =v(x1, . . . , xi + xj , . . . , xi + xj , . . . , xp)
= v(x1, . . . , xi, . . . , xi, . . . , xp) + v(x1, . . . , xi, . . . , xj , . . . , xp)
+ v(x1, . . . , xj , . . . , xi, . . . , xp) + v(x1, . . . , xj , . . . , xj , . . . , xp)
= v(x1, . . . , xi, . . . , xj , . . . , xp) + v(x1, . . . , xj , . . . , xi, . . . , xp)
d’où le résultat.
Exercice de cours 1.7 Montrer que le produit vectoriel sur R3 est une application bilinéairealternée. On pourra utiliser la formule qui définit ce produit vectoriel, (x1, y1, z1) ∧ (x2, y2, z2) =(y1z2 − y2z1, z1x2 − z2x1, x1y2 − x2y1), ou la règle des trois doigts de Maxwell.
Remarque 1.20 L’ensemble Λp(E,F ) des applications multilinéaires alternées de E dans F estun sous-espace vectoriel de Lp(E,F ) pour les opérations définies dans la remarque
multi1.17.
Remarque 1.21 De la propositionalterne1.19, on déduit immédiatement que si τ est une transposition
de Sp, v(x1, · · · , xp) = ε(τ)v(xτ(1), · · · , xτ(p)).
Cette remarque nous conduit à la proposition suivante :
formperm Proposition 1.22 Soit v : Ep = E × · · · × E −→ F une application multilinéaire alternée etsoit σ ∈ Sp. Alors pour tout vecteur (x1, · · · , xp) ∈ Ep, on a :
v(x1, · · · , xp) = ε(σ)v(xσ(1), · · · , xσ(p))

1.2. APPLICATIONS MULTILINÉAIRES 9
Preuve: La preuve résulte d’une application directe du théorèmeprod1.7. En effet toute permutation
s’écrivant comme un produit de transpositions, il existe des transpositions τ1, ..., τk telles queσ = τ1 ◦ · · · ◦ τk. De la remarque ci-dessus, il découle que :
v(x1, · · · , xp) = ε(τk)v(xτk(1), · · · , xτk(p))= ε(τk−1)ε(τk)v(xτk−1◦τk(1), · · · , xτk−1◦τk(p))
= · · · · · · · · · · · · · · ·= ε(τ1)ε(τ2) · · · ε(τk)v(xτ1◦τ2◦···◦τk(1), · · · , xτ1◦τ2◦···◦τk(p))= ε(τ1)ε(τ2) · · · ε(τk)v(xσ(1), · · · , xσ(p))
et utilisant la propriété 2. du théorèmeperm1.14, on déduit que ε(τ1)ε(τ2) · · · ε(τk) = ε(τ1 ◦ τ2 ◦ · · · ◦
τk) = ε(σ), d’où le résultat recherché.
formvol Proposition 1.23 Soit E un espace vectoriel de dimension n sur K.
1. Soit B = (e1, . . . , en) une base de E. Pour tous vecteurs x1,...,xn de E, on note
x11...xn1
,...,
x1n...xnn
leurs coordonnées respectives dans la base B. Définissons ω par :
ω : En −→ K
(x1, . . . xn) 7−→ ω(x1, . . . , xn) =∑σ∈Sn
ε(σ)n∏i=1
xσ(i),i.
Alors ω est l’unique forme n-linéaire alternée En → K vérifiant ω(e1, . . . , en) = 1.
2. ∀v ∈ Λn(E,K) on a v = v(e1, . . . , en)ω.
3. dim(Λn(E,K)) = 1.
Exercice de cours 1.8 Supposer que n = 2. Calculer ω((
12
),
(34
)).
Exercice de cours 1.9 Supposer que n = 3. Montrer que ω
123
,
234
,
357
= 0.
Preuve de la proposition : Montrons que ω est une n-forme linéaire alternée. Soit x′i ∈ E
de coordonnées
x′1i...x′ni
dans (e1, · · · , en) et soient λ, µ ∈ K. Alors :

10 CHAPITRE 1. DÉTERMINANTS
ω(x1, · · · , λxi + µx′i, · · · , xn) =∑σ∈Sn
ε(σ)xσ(1)1 · · · (λxσ(i)i + µx′σ(i)i) · · ·xσ(n)n
= λ∑σ∈Sn
ε(σ)xσ(1)1 · · ·xσ(i)i · · ·xσ(n)n
+ µ∑σ∈Sn
ε(σ)xσ(1)1 · · ·x′σ(i)i · · ·xσ(n)n
= λω(x1, · · · , xi, · · · , xn) + µω(x1, · · · , x′i, · · · , xn)
Donc ω est multilinéaire. Montrons maintenant que ω est alternée. Soit (i, j) ∈ {1, . . . , p}2 telque i < j. Supposons que xi = xj . Considérons τ = (i, j) la transposition qui échange i et j.Alors :
ω(x1, · · · , xi, · · · , xj , · · · , xn) = ω(xτ(1), · · · , xτ(n))
=∑σ∈Sn
ε(σ)xσ(1)τ(1) · · ·xσ(n)τ(n)
=∑σ∈Sn
ε(σ)xσ(τ(1))τ(τ(1)) · · ·xσ(τ(n))τ(τ(n)).
La dernière égalité provient de l’égalité
n∏j=1
xσ(j),τ(j) =n∏k=1
xσ(k),τ(k) =n∏j=1
xσ(τ(j)),τ(τ(j)).
Or τ ◦ τ = id, donc :
ω(x1, · · · , xi, · · · , xj , · · · , xn) =∑σ∈Sn
ε(σ)xσ◦τ(1)1 · · ·xσ◦τ(n)n
= −∑σ∈Sn
ε(σ ◦ τ)xσ◦τ(1)1 · · ·xσ◦τ(n)n
car ε(σ ◦ τ) = ε(σ)ε(τ) = −ε(σ) et ε(τ) = −1. Comme σ 7−→ σ ◦ τ est une bijection de Sn surlui-même, on déduit que :
ω(x1, · · · , xi, · · · , xj , · · · , xn) = −∑σ∈Sn
ε(σ)xσ(1)1 · · ·xσ(n)n
= −ω(x1, · · · , xi, · · · , xj , · · · , xn)
Donc 2ω(x1, · · · , xi, · · · , xj , · · · , xn) = 0 et comme K est R ou C, on déduit que
ω(x1, · · · , xi, · · · , xj , · · · , xn) = 0.

1.3. DÉFINITION DU DÉTERMINANT ET PREMIÈRES PROPRIÉTÉS 11
Donc ω est alternée.D’autre part si les vecteurs x1,...,xn sont les vecteurs e1,...,en de la base canonique alors
xij = 0 si i 6= j et xii = 1. Donc xσ(1)1 · · ·xσ(n)n 6= 0 si et seulement si σ(i) = i pour tout icompris entre 1 et n c’est-à-dire si et seulement si σ = id. Donc :
ω(e1, · · · , en) = x11 · · ·xnn = 1
Faire la preuve de la réciproque uniquement dans le cas n = 2. Soit maintenant v une formen-linéaire alternée. Alors :
v(x1, · · · , xn) = v
(n∑
i1=1
xi11ei1 ,
n∑i2=1
xi22ei2 , · · · ,n∑
in=1
xinnein
)
=
n∑i1=1
n∑i2=1
· · ·n∑
in=1
xi11xi22 · · ·xinnv(ei1 , · · · , ein)
Comme v est multilinéaire alternée, dès que pour k 6= l on a ik = il, alors v(ei1 , · · · , ein) = 0.Donc on ne va considérer que les termes où tous les ij sont différents. Cela revient à dire quel’application j 7−→ ij qui va de {1, · · · , n} dans lui-même est une bijection donc une permutationσ de Sn. Donc en réécrivant ij = σ(j), on a :
v(x1, · · · , xn) =∑σ∈Sn
xσ(1)1 · · ·xσ(n)nv(eσ(1), · · · , eσ(n))
=∑σ∈Sn
ε(σ)xσ(1)1 · · ·xσ(n)nv(e1, · · · , en)
où dans cette dernière égalité on a appliqué la propositionformperm1.22. Donc v = v(e1, . . . , en)ω.
En particulier, si v est une forme n-linéaire alternée telle que v(e1, . . . , en) = 1, on obtientv = ω, ce qui montre l’unicité de ω affirmée au premier point.
Enfin comme v = v(e1, . . . , en)ω, il est facile de voir que ω est l’unique n-forme alternée telleque ω(e1, . . . , en) = 1.
1.3 Définition du déterminant et premières propriétés
1.3.1 Déterminant d’une famille de n-vecteurs
Notation 1.24 D’après la proposition précédente si E est un K-espace vectoriel de dimensionn muni d’une base B = (e1, · · · , en), alors il existe une unique n-forme linéaire alternée ω telleque ω(e1, · · · , en) = 1. Notons detB = ω.
Définition 1.25 Soit E un espace vectoriel de dimension n muni d’une base B = (e1, . . . , en).Alors pour toute famille de n vecteurs (u1, . . . , un) le scalaire detB(u1, . . . , un) s’appelle le dé-terminant de la famille (u1, . . . , un) dans la base B.

12 CHAPITRE 1. DÉTERMINANTS
rem:det Remarque 1.26 De la propositionformvol1.23 on déduit immédiatement que :
∀v ∈ Λn(E,K), ∀(u1, · · · , un) ∈ En, v(u1, · · · , un) = v(e1, · · · , en)detB(u1, · · · , un)
Faire la preuve.
caracliee Proposition 1.27 Soit (u1, · · · , un) ∈ En. Alors la famille (u1, · · · , un) est liée si et seulementsi detB(u1, · · · , un) = 0.
Preuve: Supposons que (u1, · · · , un) est liée. Alors il existe des scalaires λ1, · · · , λn non tousnuls tels que :
λ1u1 + · · ·+ λnun = 0
Comme λ1, · · · , λn non tous nuls, il existe i ∈ {1, · · · , n} tel que λi 6= 0. Donc :
ui = −∑
16j6nj 6=i
λjλiuj =
∑16j6nj 6=i
αjuj
etdetB(u1, · · · , un) =
∑16j6nj 6=i
αjdetB(u1, · · · , ui−1, uj , ui−1, · · · , un) = 0
Réciproquement si detB(u1, · · · , un) = 0. Supposons par l’absurde que (u1, · · · , un) est libre.Comme E est de dimension n, B′ = (u1, · · · , un) est une base de E. Donc, d’après la Remarquerem:det1.26 appliquée à v = detB′ :
detB′(u1, · · · , un) = detB′(e1, · · · , en)detB(u1, · · · , un) = 0
Ceci contredit le fait que detB′(u1, · · · , un) = 1 donc (u1, · · · , un) est liée.
Exercice de cours 1.10 Montrer que les calculs de déterminants effectués dans les deux exer-cices suivant la Proposition
formvol1.23 sont en accord avec la Proposition
caracliee1.27.
1.3.2 Déterminant d’un endomorphisme
Proposition et définition 1.28 Soit E un espace vectoriel sur K de dimension finie n, f unendomorphisme de E et v : En −→ K une forme n-linéaire alternée non nulle. Soit f?(v)l’application de En dans K définie pour tous x1, · · · , xn par :
f?(v)(x1, · · · , xn) = v(f(x1), · · · , f(xn))
Alors f?(v) est une forme n-linéaire alternée et f?(v) = λv. De plus λ ne dépend pas du choixde v et s’appelle le déterminant de f . On note λ = det(f).

1.3. DÉFINITION DU DÉTERMINANT ET PREMIÈRES PROPRIÉTÉS 13
Preuve: La preuve du fait que f?(v) est multilinéaire alternée est laissée au lecteur. La pro-position
formvol1.23 nous disant que l’espace des formes multilinéaires alternées est un espace vectoriel
de dimension 1, il s’ensuit que v étant non nul est une base de cet espace et donc f?(v) = λv.Maintenant si v′ est une autre forme n-linéaire alternée non nulle, alors v′ = µv et on en déduitfacilement que f?(v′) = λv′ ce qui prouve l’unicité de λ.
Exercice de cours 1.11 Soit ω : R2 × R2 → R la forme bilinéaire alternée définie par laformule ω((x1, y1), (x2, y2)) = x1y2 − x2y1 et soit f1, f2, f3 : R2 → R2 définies par f1(x, y) =(2y, 3x), f2(x, y) = (x+ 2y, y) et f3(x, y) = (2x+ y, 4x+ 2y). Calculer f?1ω, f
?2ω et f?3ω.
reldetfdetb Proposition 1.29 Soit E un espace vectoriel de dimension n muni d’une base B = (e1, . . . , en)et soit f ∈ L(E). Alors :
det(f) = detB(f(e1), . . . , f(en))
Preuve: D’après la définition de det(f) on a
detB(f(e1), . . . , f(en)) = f?(detB)(e1, . . . , en) = det(f)detB(e1, . . . , en) = det(f)
lambdan Proposition 1.30 Soit E un espace vectoriel de dimension finie n sur K. Alors pour tout en-domorphisme f de E et tout λ ∈ K on a :
det(λf) = λndet(f)
Preuve: Soit B = (e1, · · · , en) une base de E alors :
det(λf) = detB((λf)(e1), · · · , (λf)(en)) = detB(λf(e1), · · · , λf(en))
= λndetB(f(e1), · · · , f(en))
Cette dernière égalité provenant du fait que detB est une forme linéaire. On en déduit donc lerésultat recherché.
produit Proposition 1.31 Soit E un espace vectoriel de dimension finie n sur K. Soient f et g deuxendomorphismes de E. Alors :
det(f ◦ g) = det(f)det(g)
Preuve: Soit v une forme n-linéaire alternée non nulle. Alors :
((f ◦ g)?v)(x1, · · · , xn) = v((f ◦ g)(x1), · · · , (f ◦ g)(xn)
= v(f(g(x1)), · · · , f(g(xn)))
= det(f)v(g(x1), · · · , g(xn))
= det(f)det(g)v(x1, · · · , xn)
Ceci permet de conclure que (f◦g)?(v) = det(f)det(g)v. Mais d’autre part, on a aussi (f◦g)?(v) =det(f ◦ g)v, d’où le résultat.

14 CHAPITRE 1. DÉTERMINANTS
Exercice de cours 1.12 Pour les fonctions f1, f2, f3 de l’exercice précédent, calculer f1 ◦ f2, etdet(f1 ◦ f2) de deux manières différentes.
inverse Proposition 1.32 Soit E un espace vectoriel de dimension finie n.
1. Alors det(IdE) = 1.
2. Un endomorphisme f de E est un automorphisme de E si et seulement si det(f) 6= 0. Si
f est un automorphisme alors : det(f−1) =1
det(f).
Preuve: Étant donné v une forme n-linéaire alternée non nulle on a de manière immédiateId?Ev = v, donc det(IdE) = 1 ce qui montre le point 1.
Supposons maintenant que f est un automorphisme. Alors d’après la propositionproduit1.31 on a :
det(f ◦ f−1) = det(f)det(f−1) = det(IdE) = 1
Ce qui montre que det(f) 6= 0 ainsi que la relation demandée.Réciproquement supposons que det(f) 6= 0. Soit B = (e1, . . . , en) une base de E. Alors
det(f) = detB(f(e1), . . . , f(en))
Comme det(f) 6= 0, d’après la propositioncaracliee1.27 (f(e1), . . . , f(en)) est une famille libre de E, donc
une base de E. Il s’ensuit que f est surjective et comme les espaces de départ et d’arrivée sontde même dimension, f est un automorphisme.
formuledetf Proposition 1.33 Soit E un espace vectoriel de dimension n sur K muni d’une base B =(e1, . . . , en). Soient f ∈ L(E) et A = (aij)16i,j6n la matrice de f dans B. Alors
det(f) =∑σ∈Sn
ε(σ)n∏i=1
aσ(i)i
Preuve: D’après la propositionreldetfdetb1.29 det(f) = detB(f(e1), . . . , f(en)). D’autre part la j-ième
colonne de A n’étant rien d’autre que les coordonnées dans la base B de f(ej), on déduit dupoint 1. de la proposition
formvol1.23 la relation souhaitée.
1.3.3 Déterminant d’une matrice
Soit A ∈Mn,n(K). On note A =
a11 · · · a1n...
...an1 · · · ann
.
dfi:detA Définition 1.34 On note fA : Kn → Kn l’application linéaire définie par : fA(X) = AX. Ledéterminant de A est alors défini par la formule
det(A) = det(fA). (1.2) equa:detA

1.3. DÉFINITION DU DÉTERMINANT ET PREMIÈRES PROPRIÉTÉS 15
Remarque 1.35— On a évidemment det(In) = 1. En effet :
det(In) = det(IKn) = 1
— D’autre part, la Propositionformuledetf1.33 donne det(A) =
∑σ∈Sn
ε(σ)
n∏i=1
aσ(i)i.
Comme corollaire de la Définitiondfi:detA1.34 et des propositions
lambdan1.30,
produit1.31 et
inverse1.32 on a les théorèmes
suivants :
Théorème 1.36 Soit A ∈Mn(K) et λ ∈ K. Alors :
det(λA) = λndet(A)
Théorème 1.37 Soient A,B ∈Mn(K). Alors det(AB) = det(A)det(B).
inversemat Théorème 1.38 Soit A ∈ Mn(K). Alors A est inversible si et seulement si det(A) 6= 0. Si A
est inversible alors : det(A−1) =1
det(A).
Nous verrons dans la partie 4.2 que l’on peut retrouver ce résultat de manière différente.
Proposition 1.39 Soit E un espace vectoriel de dimension n sur un corps K muni d’une baseB et soit (u1, · · · , un) une famille de n vecteurs. Soit P la matrice de (u1, · · · , un) dans B. Alors
detB(u1, · · · , un) = det(P )
Preuve: La matrice P est en effet la matrice, dans la base B, de l’application linéaire quienvoie les vecteurs de la base B sur les vecteurs u1, · · · , un. Or, par définition, le déterminantd’une matrice est le déterminant de l’application linéaire qui lui est associée.
1.3.4 Déterminant des matrices carrées 2× 2
Soit A =
(a11 a12a21 a22
), alors det(A) =
∑σ∈S2
ε(σ)aσ(1)1aσ(2)2. Il n’y a que deux permutations
dans S2, les permutations id =
(1 21 2
)et τ =
(1 22 1
). On a alors ε(id) = 1 et ε(τ) = −1.
Donc :
Proposition 1.40 Soit A =
(a11 a12a21 a22
), alors
det(A) = a11a22 − a21a12.

16 CHAPITRE 1. DÉTERMINANTS
1.3.5 Matrices transposées
dfi:transpose-matrice Définition 1.41 Soit A = (aij)16i,j6n. La transposée tA de A est la matrice dont les coefficientssont les ai,j, avec aij = aji.
Exercice de cours 1.13 Soit A =
(a bc d
)∈M2,2(K). Montrer que det( tA) = det(A).
Proposition 1.42 Soit A ∈Mn(K), alors det( tA) = det(A).
Preuve: Soit A = (aij)16i,j6n, on a tA = (aij)16i,j6n avec aij = aji. Donc :
det( tA) =∑σ∈Sn
ε(σ)aσ(1)1 · · · aσ(n)n
=∑σ∈Sn
ε(σ)a1σ(1) · · · anσ(n)
On peut permuter les facteurs a1σ(1),..., anσ(n). On a alors :
a1σ(1) · · · anσ(n) = aσ′(1)σ(σ′(1)) · · · aσ′(n)σ(σ′(n))
pour tout σ′ ∈ Sn. C’est en particulier vrai si on prend σ′ = σ−1. On a donc :
det( tA) =∑σ∈Sn
ε(σ)aσ−1(1)1 · · · aσ−1(n)n
mais ε(σ) = ε(σ−1), donc
det( tA) =∑σ∈Sn
ε(σ−1)aσ−1(1)1 · · · aσ−1(n)n
Or l’application σ 7−→ σ−1 est une bijection de Sn dans lui-même. Donc finalement,
det( tA) =∑σ∈Sn
ε(σ)aσ(1)1 · · · aσ(n)n = det(A)
Remarque 1.43 Le fait que det( tA) = det(A) a pour conséquence que toutes les propriétés dudéterminant démontrées sur les colonnes restent vraies sur les lignes et vice versa.
1.3. DÉFINITION DU DÉTERMINANT ET PREMIÈRES PROPRIÉTÉS 17
1.3.6 Opérations sur les lignes et les colonnes
Soit A =
a11 · · · a1n...
...an1 · · · ann
∈Mn(K).
On notera par la suite :
C1(A) =
a11...an1
, · · · , Cn(A) =
a1n...ann
les colonnes de A et :
L1(A), · · · , Ln(A)
les lignes de A.Alors det(A) = detC(C1(A), · · · , Cn(A)) = det( tA) = detC( tL1(A), · · · , tLn(A)). Les deux
propositions qui suivent sont des conséquences immédiates du fait que detC est multilinéairealternée.
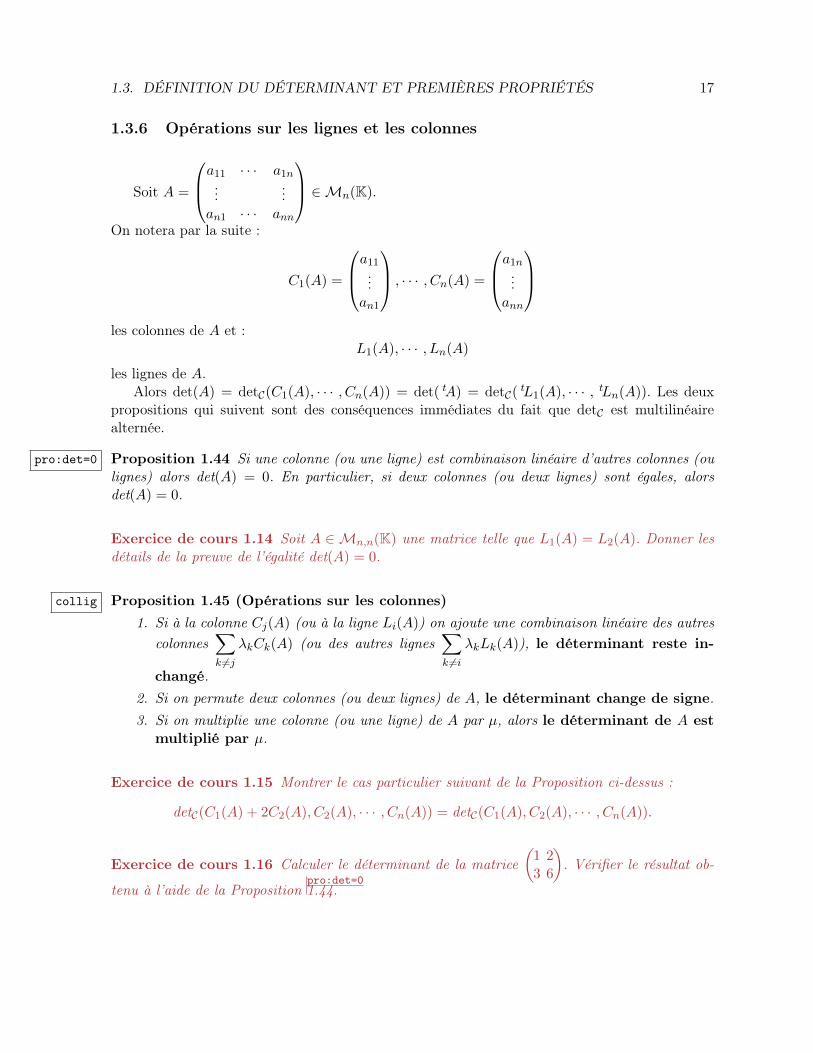
pro:det=0 Proposition 1.44 Si une colonne (ou une ligne) est combinaison linéaire d’autres colonnes (oulignes) alors det(A) = 0. En particulier, si deux colonnes (ou deux lignes) sont égales, alorsdet(A) = 0.
Exercice de cours 1.14 Soit A ∈ Mn,n(K) une matrice telle que L1(A) = L2(A). Donner lesdétails de la preuve de l’égalité det(A) = 0.
collig Proposition 1.45 (Opérations sur les colonnes)1. Si à la colonne Cj(A) (ou à la ligne Li(A)) on ajoute une combinaison linéaire des autres
colonnes∑k 6=j
λkCk(A) (ou des autres lignes∑k 6=i
λkLk(A)), le déterminant reste in-
changé.2. Si on permute deux colonnes (ou deux lignes) de A, le déterminant change de signe.3. Si on multiplie une colonne (ou une ligne) de A par µ, alors le déterminant de A est
multiplié par µ.
Exercice de cours 1.15 Montrer le cas particulier suivant de la Proposition ci-dessus :
detC(C1(A) + 2C2(A), C2(A), · · · , Cn(A)) = detC(C1(A), C2(A), · · · , Cn(A)).
Exercice de cours 1.16 Calculer le déterminant de la matrice(
1 23 6
). Vérifier le résultat ob-
tenu à l’aide de la Propositionpro:det=01.44.
18 CHAPITRE 1. DÉTERMINANTS
1.4 Développement d’un déterminant suivant une ligne ou unecolonne
1.4.1 Cofacteurs et comatrices
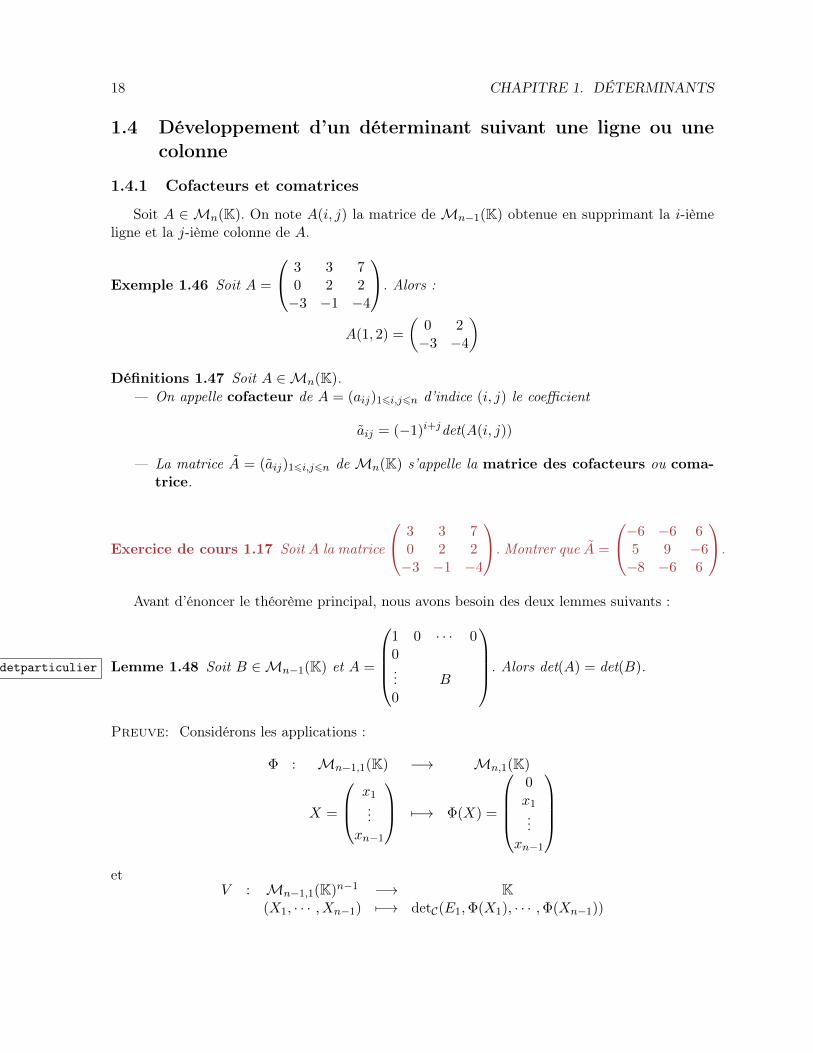
Soit A ∈ Mn(K). On note A(i, j) la matrice deMn−1(K) obtenue en supprimant la i-ièmeligne et la j-ième colonne de A.
Exemple 1.46 Soit A =
3 3 70 2 2−3 −1 −4
. Alors :
A(1, 2) =
(0 2−3 −4
)Définitions 1.47 Soit A ∈Mn(K).
— On appelle cofacteur de A = (aij)16i,j6n d’indice (i, j) le coefficient
aij = (−1)i+jdet(A(i, j))
— La matrice A = (aij)16i,j6n de Mn(K) s’appelle la matrice des cofacteurs ou coma-trice.
Exercice de cours 1.17 Soit A la matrice
3 3 70 2 2−3 −1 −4
. Montrer que A =
−6 −6 65 9 −6−8 −6 6
.
Avant d’énoncer le théorème principal, nous avons besoin des deux lemmes suivants :
detparticulier Lemme 1.48 Soit B ∈Mn−1(K) et A =
1 0 · · · 00... B0
. Alors det(A) = det(B).
Preuve: Considérons les applications :
Φ : Mn−1,1(K) −→ Mn,1(K)
X =
x1...
xn−1
7−→ Φ(X) =
0x1...
xn−1
et
V : Mn−1,1(K)n−1 −→ K(X1, · · · , Xn−1) 7−→ detC(E1,Φ(X1), · · · ,Φ(Xn−1))

1.4. DÉVELOPPEMENT D’UN DÉTERMINANT 19
Alors Φ est une application linéaire et de manière immédiate, V est une forme n − 1-linéairealternée. Soit C′ = (E′1, · · · , E′n−1) la base canonique deMn−1,1(K). Alors
V (E′1, · · · , E′n−1) = detC(E1,Φ(E′1), · · · ,Φ(E′n−1)) = detC(E1, · · · , En) = 1
D’après la propositionformvol1.23, il existe une unique n − 1-forme alternée sur Mn−1,1(K) vérifiant
V (E′1, . . . , E′n−1) = 1. Donc V = detC′ et on a :
det(B) = detC′(C1(B), · · · , Cn−1(B))
= detC [E1,Φ(C1(A)), · · · ,Φ(Cn−1(A))]
=
∣∣∣∣∣∣∣∣∣1 0 · · · 00... B0
∣∣∣∣∣∣∣∣∣ce qui achève la preuve.
technic Lemme 1.49 Soit A(j) =
a11 · · · a1j−1 0 a1j+1 · · · a1n...
......
......
ai−11 · · · ai−1j−1 0 ai−1j+1 · · · ai−1nai1 · · · aij−1 1 aij+1 · · · ainai+11 · · · ai+1j−1 0 ai+1j+1 · · · ai+1n...
......
......
an1 · · · anj−1 0 anj+1 · · · ann
.
Alors det(A(j)) = (−1)i+jdet(A(i, j)).
Preuve: Après avoir échangé la ligne i avec la ligne i−1, puis la ligne i−1 avec la ligne i−2, etainsi de suite jusqu’à la première ligne, et après avoir fait de même avec les colonnes, on obtientd’après les règles de la Proposition
collig1.45 :
det(A(j)) = (−1)i+j
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
1 ai1 · · · aij−1 aij+1 · · · ain0 a11 · · · a1j−1 a1j+1 · · · a1n...
......
......
0 ai−11 · · · ai−1j−1 ai−1j+1 · · · ai−1n0 ai+11 · · · ai+1j−1 ai+1j+1 · · · ai+1n...
......
......
0 an1 · · · anj−1 anj+1 · · · ann
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
= (−1)i+j
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
1 ai1 · · · aij−1 aij+1 · · · ain0...... A(i, j)...0
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣

20 CHAPITRE 1. DÉTERMINANTS
= (−1)i+j
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
1 0 · · · · · · · · · · · · 00...... A(i, j)...0
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣= (−1)i+jdet(A(i, j))
d’après le lemme précédent.Nous sommes maintenant en mesure d’énoncer un théorème fondamental sur le calcul des
déterminants qui sert constamment.
develop Théorème 1.50 Soit A = (aij) ∈Mn(K) et k un entier tel que 1 6 k 6 n. Alors :
1. det(A) =n∑i=1
(−1)i+kaikdet(A(i, k)) =n∑i=1
aikaik. On dit qu’on développe suivant la
colonne k.
2. det(A) =n∑j=1
(−1)k+jakjdet(A(k, j)) =n∑j=1
akj akj. On dit qu’on développe suivant la
ligne k.
Exemple 1.51 Calculons det(A) =
∣∣∣∣∣∣3 3 70 2 2−3 −1 −4
∣∣∣∣∣∣. Nous allons développer ce déterminant sui-
vant la deuxième colonne. Pour cela affectons chaque coefficients aij de la matrice, du signe(−1)i+j. On a alors :
∣∣∣∣∣∣3 3 70 2 2−3 −1 −4
∣∣∣∣∣∣ =
∣∣∣∣∣∣3+ 3− 7+
0− 2+ 2−
−3+ −1− −4+
∣∣∣∣∣∣= −3
∣∣∣∣ 0 2−3 −4
∣∣∣∣+2
∣∣∣∣ 3 7−3 −4
∣∣∣∣−(−1)
∣∣∣∣3 70 2
∣∣∣∣où∣∣∣∣ 0 2−3 −4
∣∣∣∣ a été obtenue en supprimant la première ligne et la deuxième colonne,∣∣∣∣ 3 7−3 −4
∣∣∣∣ ensupprimant la deuxième ligne et la deuxième colonne et
∣∣∣∣3 70 2
∣∣∣∣ la troisième ligne et la deuxième
colonne.D’où det(A) = −3 · 6 + 2 · 9 + 1 · 6 = 6.
Preuve du théorèmedevelop1.50: Montrons le 1. du théorème. La k-ième colonne de A peut sécrire :
a1k...ank
= a1k
10...0
+ · · ·+ ank
0...01

1.4. DÉVELOPPEMENT D’UN DÉTERMINANT 21
comme le déterminant est multilinéaire, on a immédiatement,
det(A) =n∑i=1
aik
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
a11 · · · a1k−1 0 a1k+1 · · · a1n...
......
......
ai−11 · · · ai−1k−1 0 ai−1k+1 · · · ai−1nai1 · · · aik−1 1 aik+1 · · · ainai+11 · · · ai+1k−1 0 ai+1k+1 · · · ai+1n...
......
......
an1 · · · ank−1 0 ank+1 · · · ann
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣Et d’après le lemme
technic1.49, on a :
det(A) =n∑i=1
(−1)i+kaikdet(A(i, k)).
D’autre part, comme det( tA) = det(A), on obtient immédiatement l’assertion 2.
Proposition 1.52 (Règle de Sarrus) On a :∣∣∣∣∣∣a11 a12 a13a21 a22 a23a31 a32 a33
∣∣∣∣∣∣ = a11a22a33 + a21a32a13 + a31a12a23
− (a13a22a31 + a23a32a11 + a33a12a21)
La preuve s’obtient en développant par rapport à n’importe quelle ligne ou colonne.
Remarque 1.53 On obtient facilement le résultat en écrivant :
∣∣∣∣∣∣∣∣a11 a12 a13a21 a22 a23a31 a32 a33
∣∣∣∣∣∣∣∣a11 a12 a13a21 a22 a23
= a11a22a33 + a21a32a13 + a31a12a23
− (a13a22a31 + a23a32a11 + a33a12a21)
Attention ! La règle de Sarrus fonctionne uniquement pour les matrices (3, 3).
1.4.2 Matrices triangulaires
Définition 1.54 Une matrice A = (ai,j) est dite triangulaire si elle est triangulaire inférieure(ie i < j ⇒ ai,j = 0) ou triangulaire supérieure (ie i > j ⇒ ai,j = 0).

22 CHAPITRE 1. DÉTERMINANTS
dettriang Proposition 1.55 Soit A = (aij)16i,j6n une matrice triangulaire. Alors det(A) = a11 · · · ann.
Preuve: On démontre le résultat par récurrence sur n pour les matrices triangulaires supé-rieures. La relation est vraie pour n = 1. Supposons maintenant qu’elle est vraie pour les matricesdeMn(K) pour un entier n > 1 et montrons qu’elle reste vraie pour les matrices deMn+1(K).Soit A une matrice triangulaire supérieure deMn+1(K). Alors
A =
a11 a12 · · · · · · a1n
0 a22...
... 0. . .
......
.... . .
...0 0 · · · 0 an+1 n+1
En développant suivant la dernière ligne on a :
det(A) = an+1 n+1
∣∣∣∣∣∣∣∣∣∣∣∣∣
a11 a12 · · · · · · a1n
0 a22...
... 0. . .
......
.... . .
...0 0 · · · 0 ann
∣∣∣∣∣∣∣∣∣∣∣∣∣Par hypothèse de récurrence le résultat étant vrai pour les matrices de Mn(K) on obtient lerésultat voulu.
D’autre part, comme pour toute matrice carrée A, det(A) = det( tA), la proposition restevraie pour les matrices triangulaires inférieures.
Exercice de cours 1.18 Calculer le déterminant de la matrice
1 2 30 2 30 0 3
.
1.4.3 Matrices inverses et déterminant
theo:comatrice Théorème 1.56 Pour tout A ∈Mn(K), on a :
A tA = tAA = det(A)In
Preuve: Posons A = (aij) et tA = (bjk). Alors bjk = akjSoit C = A tA. Montrons que C = det(A)In. Pour cela posons C = (cik).

1.4. DÉVELOPPEMENT D’UN DÉTERMINANT 23
Soit D(i, k) la matrice
a11 · · · · · · · · · · · · · · · · · · a1n...
...ai1 · · · · · · · · · · · · · · · · · · ain...
...ak−11 · · · · · · · · · · · · · · · · · · ak−1nai1 · · · · · · · · · · · · · · · · · · ainak+11 · · · · · · · · · · · · · · · · · · ak+1n
......
an1 · · · · · · · · · · · · · · · · · · ann
D’après le 1. du théorème
develop1.50, on a
det(D(i, k)) =n∑j=1
(−1)k+jaijdet(A(k, j)) =n∑j=1
aij akj
=n∑j=1
aijbjk = ci,k
Si i = k, alors D(i, k) = A, donc cii = det(A). Si i 6= k, les lignes k et i de D(i, k) sont lesmêmes. Donc ci,k = 0. On en déduit donc que C = det(A)In.
Exercice de cours 1.19 Soit A la matrice
3 3 70 2 2−3 −1 −4
. Montrer par le calcul que
A tA = tAA = det(A)I3.
On en déduit alors immédiatement le corollaire suivant :
Corollaire 1.57 Soit A ∈Mn(K). Alors A est inversible si et seulement si det(A) 6= 0 (résultat
déjà énoncé dans le théorèmeinversemat1.38). Si A est inversible, A−1 =
tA
det(A).
Exercice de cours 1.20 Soit A la matrice
− 3 2 − 13 1 22 0 1
. Calculer det(A). Monter que
A est inversible, et que son inverse a des coefficients entiers. Calculer A−1 par deux méthodesdifférentes.

24 CHAPITRE 1. DÉTERMINANTS
1.5 Formules de Cramer
On rappelle que si A ∈Mn(K) et (S) : AX = Y est le système de n équations à n inconnuesassocié, alors les propriétés suivantes sont équivalentes :
— (S) est un système de Cramer.— (S) admet une solution et une seule.— rg(A) = n.— A est inversible.— det(A) 6= 0.
Si (S) est de Cramer, la solution est donnée par X = A−1Y =tAY
det(A). Si on note X =
x1...xn
et Y =
y1...yn
, on a alors la proposition suivante :
Proposition 1.58 (Formules de Cramer) Si (S) est de Cramer, alors :
xi =
∣∣∣∣∣∣∣a11 · · · a1i−1 y1 a1i+1 · · · a1n...
......
......
an1 · · · ani−1 yn ani+1 · · · ann
∣∣∣∣∣∣∣det(A)
Preuve: Posons A = (aij). On a vu que X =tAY
det(A), donc :x1...
xn
=1
det(A)
a11 · · · an1...
...a1n · · · ann
y1...yn
Donc
1
det(A)
∣∣∣∣∣∣∣a11 · · · a1i−1 y1 a1i+1 · · · a1n...
......
......
an1 · · · ani−1 yn ani+1 · · · ann
∣∣∣∣∣∣∣=
1
det(A)
n∑j=1
yj(−1)i+jdet(A(j, i))
=1
det(A)
n∑j=1
yj aji = xi

1.6. RANG D’UNE MATRICE 25
1.6 Rang d’une matrice
Définition 1.59 (Matrice extraite) Soit A ∈ Mp,q(K), A = (aij). Soit r 6 p et s 6 q. Ondit que A′ ∈Mr,s(K) est une matrice extraite de A si A′ est de la forme A′ = (aikjl)16k6r
16l6soù
1 6 i1 < · · · < ir 6 p et 1 6 j1 < · · · < js 6 q.
Exemple 1.60 Soit A =
4 −1 3 6 72 1 5 −1 03 6 8 2 41 1 2 −1 1
Alors la matrice A′ =
(4 3 63 8 2
)est une matrice extraite de A.
theo:rang Théorème 1.61 Soit A ∈Mp,q(K). Alors A est de rang r si et seulement si :
1. Il existe une matrice carrée A′ extraite de A de format (r, r) telle que det(A′) 6= 0.
2. Pour tout s > r, toute matrice carrée A′′ de format (s, s) extraite de A vérifie det(A′′) = 0.
Preuve:
1. Montrons tout d’abord que si A est une matrice deMp,q(K) de rang r, alors il existe unematrice carrée A′ extraite de A de format (r, r) telle que det(A′) 6= 0 :Comme rg(A) = rg(C1(A), . . . , Cq(A)) = r, on peut extraire de (C1(A), . . . , Cq(A)) unefamille libre (Cj1(A), . . . , Cjr(A)) de r vecteurs (j1 < · · · < jr).Notons A′ la matrice deMp,r(K) dont la `-ième colonne est Cj`(A). Alors :
r = rg(A′) = rg( tA′) = rg(L1(A′), · · · , Lp(A′))
Donc on peut extraire de la famille (L1(A′), · · · , Lp(A′)) une famille libre de r vecteurs
(Li1(A′), · · · , Lir(A′)) (i1 < · · · < ir). Soit A′′ la matrice deMr(K) dont la k-ième ligneest Lik(A′). En fait A′′ = (aikj`)16k,`6r et rg(A′′) = r. Donc det(A′′) 6= 0.
2. Montrons maintenant que s’il existe une matrice carrée A′ ∈ Ms(K) extraite de A telleque det(A′) 6= 0 alors rg(A) > s :Tout d’abord A′ = (aikj`)16k,`6s avec i1 < · · · < is et j1 < · · · < js.Puisque det(A′) 6= 0 rg(A′) = s et (C1(A
′), · · · , Cs(A′)) est une famille libre. Mais celaimplique que la famille (Cj1(A), · · · , Cjs(A)) est libre. Donc rg(A) > s.
Des points 1. et 2. on déduit de manière immédiate le théorème.
Exemple 1.62 Soit A =
2 3 5 4−1 0 −1 11 2 3 3
. 2L1 + L2 − 3L3 = 0. Alors :∣∣∣∣∣∣2 3 5−1 0 −11 2 3
∣∣∣∣∣∣ =
∣∣∣∣∣∣3 5 40 −1 12 3 3
∣∣∣∣∣∣ =
∣∣∣∣∣∣2 3 4−1 0 11 2 3
∣∣∣∣∣∣ =
∣∣∣∣∣∣2 5 4−1 −1 11 3 3
∣∣∣∣∣∣ = 0

26 CHAPITRE 1. DÉTERMINANTS
Donc tous les déterminants de matrices (3, 3) extraites de A sont nuls, donc rg(A) < 3.Pour montrer que A est de rang 2, il suffit de trouver une matrice (2, 2) extraite de détermi-
nant non nul. Or ∣∣∣∣ 2 3−1 0
∣∣∣∣ 6= 0
donc rg(A) = 2.
Chapitre 2
Réduction des endomorphismes
Dans toute la suite, K désigne le corps R ou C et E est un espace vectoriel sur K de dimensionfinie n D’autre part L(E) désigne le K-espace vectoriel des endomorphismes de E.
2.1 Sous-espaces propres et diagonalisation
Étant donné un espace vectoriel E sur un corps K de dimension finie, les endomorphismesles plus simples sont les homothéties f = λIdE . La matrice de ces endomorphismes est la mêmedans toutes les bases de E. C’est une matrice diagonale avec des λ sur la diagonale et des 0partout ailleurs. Autrement dit il n’y a pas de direction privilégiée.
Étant donné maintenant un endomorphisme u quelconque, on va essayer dans ce chapitre dele "dévisser" en "cassant" l’espace E en une somme directe de sous-espaces stables (précisémentles sous-espaces propres) sur lesquels u se comportera comme une homothétie. Si cela est possibleen prenant une base dans chacun de ces ous-espaces et en les réunissant, on obtiendra une basede E dans laquelle la matrice de u sera diagonale.
2.1.1 Valeurs propres, vecteurs propres
Définition 2.1 Soient u ∈ L(E) et λ ∈ K. S’il existe un vecteur non nul x de E tel queu(x) = λx, alors on dit que :
1. λ est une valeur propre de u.
2. x est un vecteur propre de u associé à λ.
On appelle spectre de u et on note Sp(u) l’ensemble des valeurs propres de u.
Ker Remarque 2.2 1. Il résulte de la définition qu’un vecteur propre n’est jamais nul.
2. λ est une valeur propre de u si et seulement si Ker(u− λIdE) 6= {0}.
En effet λ est une valeur propre de u si et seulement si il existe un vecteur non nul x de E telque u(x) = λx. Or 0 = u(x)− λx = (u− λIdE)(x). Il s’ensuit que λ est une valeur propre de usi et seulement si Ker(u− λIdE) 6= {0}.
27

28 CHAPITRE 2. RÉDUCTION DES ENDOMORPHISMES
Définition 2.3 Soient A ∈ Mn(K) et λ ∈ K. S’il existe un vecteur colonne non nul X deMn,1(K) tel que AX = λX, alors on dit que :
1. λ est une valeur propre de A.
2. X est un vecteur propre de A associé à λ.
On appelle spectre de A et on note Sp(A) l’ensemble des valeurs propres de A.
exo:matA Exercice de cours 2.1 Soit A =
(3 2−4 −3
). Déterminer le spectre de A. On pourra résoudre
le système {3x+ 2y = λx−4x− 3y = λy ,
dépendant du paramètre λ.
equivAu Remarque 2.4 Soient B une base de E, u ∈ L(E) et A = MatB(u). Alors Sp(u) = Sp(A). Plusprécisément :
1. λ est une valeur propre de u si et seulement si λ est une valeur propre de A.
2. x est un vecteur propre de u si et seulement si X = MatB(x) est un vecteur propre de A.
Définition 2.5 Soit A = (aij)16i,j6n une matrice carrée de Mn(K). On appelle trace de A lescalaire :
tr(A) :=
n∑i=1
aii
Proposition 2.6 Soient (A,B) ∈Mn(K)2. Alors tr(AB) = tr(BA).
Exercice de cours 2.2 Donner une preuve de ce résultat. En cas de difficulté, commencer parle cas où n = 2.
trace Proposition et définition 2.7 Soient u ∈ L(E) et B une base de E. Alors le scalaire tr(MatB(u))ne dépend pas de la base choisie et s’appelle la trace de u. On le note tr(u).
Preuve: Soit B′ une autre base, et soit P la matrice de passage de B à B′. Soient A = MatB(u)et A′ = MatB′(u). On a A′ = P−1AP , donc tr(A′) = tr(P−1AP ) = tr(APP−1) = tr(A).
exo:pol-car Exercice de cours 2.3 Soit A la matrice de l’exerciceexo:matA2.1, A =
(3 2−4 −3
)et soit x un réel.
Montrer que det(A− xI2) = x2 − 1.

2.1. SOUS-ESPACES PROPRES ET DIAGONALISATION 29
polycarendo Proposition et définition 2.8 Soit u ∈ L(E). La fonction
χu : K −→ Kx 7−→ det(u− xIdE)
est une fonction polynomiale de degré n. De plus :
χu(X) = (−1)nXn + (−1)n−1tr(u)Xn−1 + · · ·+ det(u)
χu s’appelle le polynôme caractéristique de u.
polycarmat Proposition et définition 2.9 Soit A ∈Mn(K). La fonction
χA : K −→ Kx 7−→ det(A− xIn)
est une fonction polynomiale de degré n. De plus :
χA(X) = (−1)nXn + (−1)n−1tr(A)Xn−1 + · · ·+ det(A)
χA s’appelle le polynôme caractéristique de A.
polycar Remarques 2.10— Soient B une base de E, u ∈ L(E) et A = MatB(u). Alors χA = χu.— Dans le cas n = 2, observer que χu est déterminé par tr(u) et det(u).
Exercice de cours 2.4 Vérifier que ces énoncés sont compatibles avec le calcul que vous avezfait dans l’exercice
exo:pol-car2.3.
Preuve des énoncéspolycarendo2.8 et
polycarmat2.9 : Soit A = (aij)16i,j6n. Alors :
χA(x) = det(A− xIn) =∑σ∈Sn
ε(σ)n∏i=1
(aσ(i)i − xδσ(i)i)
Chacun des produitsn∏i=1
(aσ(i)i − xδσ(i)i) est une fonction polynomiale en x de degré inférieur ou
égal à n. Il en est de même de leur somme et χA est un polynôme de degré au plus n. Or :
χA(x) =∑
σ∈Sn\{Id}
ε(σ)n∏i=1
(aσ(i)i − xδσ(i)i) +n∏i=1
(aii − x)
Remarquons que si σ ∈ Sn \ {Id}, alors il existe j ∈ {1, · · · , n} tel que σ(j) 6= j. En posantk = σ−1(j), on a k 6= j et σ(k) 6= k. Donc δσ(j)j = δσ(k)k = 0. Ainsi :
n∏i=1
(aσ(i)i − xδσ(i)i) = aσ(j)jaσ(k)k
n∏i=1i 6=j,k
(aσ(i)i − xδσ(i)i)

30 CHAPITRE 2. RÉDUCTION DES ENDOMORPHISMES
et donc pour chaque σ ∈ Sn \ {Id},n∏i=1
(aσ(i)i−xδσ(i)i) est une fonction polynomiale de degré au
plus n− 2 et il en est de même de∑
σ∈Sn\{Id}
ε(σ)
n∏i=1
(aσ(i)i − xδσ(i)i). Or commen∏i=1
(aii − x) est
de degré n il s’ensuit que χA est de degré n et que les coefficients de xn et xn−1 dans χu sont
les coefficients de xn et xn−1 dansn∏i=1
(aii − x). Donc les coefficients de xn et xn−1 dans χA sont
respectivement (−1)n et (−1)n−1n∑i=1
aii = (−1)n−1tr(A).
Le terme constant de χA est χA(0) = det(A). Ceci prouve l’énoncépolycarmat2.9. La preuve de
polycarendo2.8 est
une conséquence immédiate de la remarquepolycar2.10 et de la proposition et définition
trace2.7.
En raison des remarquesequivAu2.4 et
polycar2.10, on se contentera dans la majorité des cas d’énoncer les
résultats dans le cadre des endomorphismes.
Proposition 2.11 Soit u ∈ L(E). Alors λ ∈ Sp(u) si et seulement si λ est racine de χu.
Preuve: On a vu d’après la remarqueKer2.2 que λ est valeur propre de u si et seulement si
Ker(u− λIdE) 6= {0}. Or les 4 assertions ci-dessous sont équivalentes :1. Ker(u− λIdE) 6= {0}2. u− λIdE n’est pas injective.3. u− λIdE n’est pas un isomorphisme.4. det(u− λIdE) = 0 (voir proposition
inverse1.32).
Donc λ est valeur propre de u si et seulement si χu(λ) = 0.
Exercice de cours 2.5 Résoudre à nouveau l’exerciceexo:matA2.1 en utilisant le polynôme caractéris-
tique de A.
Corollaire 2.12 Tout endomorphisme u de E a au plus n valeurs propres.
Définition 2.13 Soient u ∈ L(E) et λ une valeur propre de u. On dira que λ est une valeurpropre d’ordre m si λ est une racine d’ordre m de χu. L’entier m s’appelle la multiplicité de λet sera noté m(λ).
exo:matBC Exercice de cours 2.6 Déterminer le spectre et la multiplicité des valeurs propres des matrices
suivantes : B =
3 1 21 2 1− 2 − 1 − 1
et C =
0 − 1 02 3 0− 3 − 3 1
.
χB(X) = χC(X) = (X − 1)2(X − 2). La matrice B n’est pas diagonalisable et C est diagonali-sable.

2.1. SOUS-ESPACES PROPRES ET DIAGONALISATION 31
2.1.2 Sous-espaces propres
Définition 2.14 Soient u ∈ L(E) et λ une valeur propre de u. Le sous-espace vectoriel Eλ(u) :=Ker(u− λIdE) s’appelle le sous-espace propre associé à la valeur propre λ.
Remarque 2.15
1. Si λ est une valeur propre de u, on a toujours Eλ(u) 6= {0}.2. Eλ(u) \ {0} est l’ensemble des vecteurs propres de u.
3. Les sous-espaces propres de u sont stables par u (pour toute valeur propre λ, u(Eλ(u)) ⊂Eλ(u)).
Définition 2.16 Soit A ∈Mn(K) et λ une valeur propre de A. Le sous-espace vectorielMλ(A) :=Ker(A− λIn) deM1,n(K) s’appelle le sous-espace propre associé à la valeur propre λ.
exo:espaces-propres Exercice de cours 2.7 Calculer les sous-espaces propres des matrices A,B et C des exercicesexo:matA2.1 et
exo:matBC2.6.
Exercice de cours 2.8 Montrer que u(Eλ(u)) ⊂ Eλ(u) pour toute valeur propre λ de u.
pro:inegalite-esp-propre Proposition 2.17 Soient u ∈ L(E) et λ une valeur propre de u. Alors :
1 6 dim(Eλ(u)) 6 m(λ)
Preuve: Posons p = dim(Eλ(u)). Soit (e1, · · · , ep) une base de Eλ(u) que l’on complète parep+1, · · · , en pour obtenir une base B de E. Dans ce cas on a :
MatB(u) =
λ 0 · · · 0 a1 p+1 · · · a1n
0. . . . . .
......
......
. . . . . . 0...
...0 · · · 0 λ ap p+1 · · · apn0 · · · · · · 0 ap+1 p+1 · · · ap+1 n...
......
...0 · · · · · · 0 an p+1 · · · ann
Le polynôme caractéristique s’écrit donc :
χu(x) = (λ− x)pχM (x)
où M = (aij)p+16i,j6n. Donc (λ− x)p divise χu et p 6 m(λ).
sommedirecte Théorème 2.18 Soit u ∈ L(E). Alors les sous-espaces propres de u sont en somme directe.

32 CHAPITRE 2. RÉDUCTION DES ENDOMORPHISMES
Preuve: Soient λ1, · · · , λr les valeurs propres de u. Le but est de montrer que si (v1, · · · , vr) ∈Eλ1(u)× · · · × Eλr(u) et v1 + · · ·+ vr = 0 alors vi = 0 pour tout i ∈ {1, · · · , r}.
On va procéder par récurrence en montrant que Eλ1(u), · · · , Eλj (u) sont en somme directepour tout j ∈ {1, · · · , r}.
Pour j = 1, la propriété est vraie.On suppose maintenant la propriété vraie au rang j ∈ {1, · · · , r − 1}. Montrons qu’elle est
vraie au rang j + 1.
Soit (v1, · · · , vj+1) ∈ Eλ1(u)× · · · × Eλj+1(u) tel que
j+1∑i=1
vi = 0. Alors :
u
(j+1∑i=1
vi
)=
j+1∑i=1
u(vi) =
j+1∑i=1
λivi = 0
Donc :
0 =
j+1∑i=1
λivi − λj+1
j+1∑i=1
vi =
j+1∑i=1
(λi − λj+1)vi =
j∑i=1
(λi − λj+1)vi
Or pour tout i ∈ {1, · · · , j}, (λi − λj+1)vi ∈ Eλi(u). Comme par hypothèse de récurrence,Eλ1(u), · · · , Eλj (u) sont en somme directe, il s’ensuit que pour tout i ∈ {1, · · · , j}, (λi−λj+1)vi =0. De plus λi − λj+1 6= 0 pour tout i ∈ {1, · · · , j}. Donc :
v1 = · · · = vj = 0
etj+1∑i=1
vi = vj+1 = 0. Donc Eλ1(u), · · · , Eλj+1(u) sont en somme directe. Par récurrence sur j la
propriété est vraie pour tout j ∈ {1, · · · , r}.
Exercice de cours 2.9 Vérifier que les espaces propres obtenus pour A,B et C dans l’exerciceexo:espaces-propres2.7 sont en somme directe.
2.1.3 Endomorphismes et matrices diagonalisables
criterediag Théorème 2.19 Soit u ∈ L(E). Alors les propositions suivantes sont équivalentes :1. Il existe une base B de E telle que MatB(u) soit diagonale.2. Il existe une base B de E constituée de vecteurs propres de u.3. E est la somme directe des sous-espaces propres de u.4. χu est scindé sur K (i.e. χu a toute ses racines dans K) et pour toute valeur propre de u,
dim(Eλ(u)) = m(λ).
Preuve: 1⇒ 2. Il existe une base B = (e1, · · · , en) de E telle que :
MatB(u) =
α1 0. . .
0 αn

2.1. SOUS-ESPACES PROPRES ET DIAGONALISATION 33
Par définition de la matrice d’un endomorphisme dans une base, on a pour tout i ∈ {1, · · · , n},u(ei) = αiei ce qui prouve 2.
2⇒ 3. Soit B = (e1, · · · , en) une base formée de vecteurs propres de u. D’après le théorèmesommedirecte2.18 les sous-espaces propres sont en somme directe et B = (e1, · · · , en) est une famille libre der⊕i=1
Eλi(u). Donc :
dim
(r⊕i=1
Eλi(u)
)> n = dim(E)
et E =r⊕i=1
Eλi(u).
3 ⇒ 1 et 3 ⇒ 4. Soient λ1, · · · , λr les valeurs propres de u. Posons ni = dim(Eλi(u)).Soient B1, · · · ,Br des bases respectivement de Eλ1(u), · · · , Eλr(u). Comme par hypothèse E =r⊕i=1
Eλi(u), B =
r⋃i=1
Bi est une base de E constituée de vecteurs propres. Donc :
MatB(u) =
λ1 0 · · · · · · · · · · · · 0
0. . . . . .
......
. . . λ1. . .
......
. . . . . . . . ....
.... . . λr
. . ....
.... . . . . . 0
0 · · · · · · · · · · · · 0 λr
ce qui prouve 1.
D’autre part χu(x) = (λ1 − x)n1 · · · (λr − x)nr . Il s’ensuit que le polynôme est scindé et quela multiplicité des valeurs propres vérifie m(λi) = ni = dim(Eλi(u)) ce qui prouve 4.
4⇒ 3 On suppose que χu est scindé sur K et que pour toute valeur propre de u, dim(Eλ(u)) =m(λ). Donc :
χu(x) =r∏i=1
(λi − x)m(λi)
et dim(Eλi(u)) = m(λi). On a donc :
dim
(r⊕i=1
Eλi(u)
)=
r∑i=1
dim(Eλi) =r∑i=1
m(λi) = n
Par conséquentr⊕i=1
Eλi(u) = E.
exo:critere-diago Exercice de cours 2.10 Pour les matrices A,B,C ci-dessus et pour chaque valeur propre λ,déterminer dimEλ et m(λ).
34 CHAPITRE 2. RÉDUCTION DES ENDOMORPHISMES
Définition 2.20 Soit u ∈ L(E). On dit que u est diagonalisable si l’une des 4 conditionséquivalentes du théorème
criterediag2.19 est vérifiée.
exo:ABCdiago Exercice de cours 2.11 Les endomorphismes de Kn associés aux matrices A,B et C ci-dessussont-ils diagonalisables ?
Définition 2.21 Soit A ∈ Mn(K). On dit que A est diagonalisable si A est semblable à unematrice diagonale. Autrement dit A est diagonalisable s’il existe une matrice P ∈ GLn(K) et unematrice diagonale D ∈Mn(K) telles que : D = P−1AP .
rem:corps Remarque 2.22 Lorsqu’on voudra insister sur le fait que la matrice P est à coefficients dansK, on précisera que A est diagonalisable sur K. Ainsi, par exemple, une matrice à coefficientsdans R pourra être diagonalisable sur C mais non sur R : ceci signifie qu’il existe P ∈ GLn(C)telle que P−1AP est une matrice diagonale à coefficients complexes, mais qu’il n’existe pas dematrice P ∈ GLn(R) telle que P−1AP est une matrice diagonale à coefficients réels.
exo:diago-sur-R Exercice de cours 2.12 Donner un exemple d’une matrice carrée d’ordre 2 à coefficients réelsdont les valeurs propres sont deux nombres complexes non réels (on pourra d’abord choisir unpolynôme χ ayant deux racines complexes, puis une matrice dont le polynôme caractéristique estχ). Montrer que cette matrice est diagonalisable sur C mais pas sur R.
Exercice de cours 2.13 (Exercice facultatif) Soit A une matrice à coefficients réels et λune valeur propre réelle de A. Montrer que les espaces propres réel et complexe de A pour lavaleur propre λ ont la même dimension.
Soit A ∈Mn(R) de polynôme caractéristique scindé sur R. Montrer que A est diagonalisablesur R si et seulement si elle est diagonalisable sur C.
diagmatendo Remarque 2.231. Soient B une base de E, u ∈ L(E) et A = MatB(u). Alors u est diagonalisable si et
seulement si A est diagonalisable.2. Si A est diagonalisable alors il existe P ∈ GLn(K) telle que D = P−1AP est diagonale.
Dans ce cas (C1(P ), · · · , Cn(P )) est une base de Mn,1(K) constituée de vecteurs propresde A.
Corollaire 2.24 Soit u ∈ L(E). Alors si χu est scindé sur K et si toutes les racines de χu sontsimples alors u est diagonalisable.
Exercice de cours 2.14 Donner un exemple d’endomorphisme u diagonalisable mais tel queles racines de χu ne sont pas simples.

2.2. TRIGONALISATION ET THÉORÈME DE CAYLEY-HAMILTON 35
2.1.4 Calcul des puissances d’une matrice
Soit A ∈Mk(K). Si A est diagonalisable alors il existe une matrice diagonale D ∈Mk(K) et
P ∈ GLk(K) telles que D = P−1AP . Or on sait calculer Dn. En effet si D =
α1 0. . .
0 αk
,
alors Dn =
αn1 0
. . .0 αnk
. D’autre part on peut montrer par récurrence que :
Dn = (P−1AP )n = P−1AnP
d’où :An = PDnP−1
Exercice de cours 2.15 Calculer les puissances de la matrice A de l’exerciceexo:matA2.1.
2.2 Trigonalisation et théorème de Cayley-Hamilton
2.2.1 Endomorphismes trigonalisables
Définition 2.25 Soit u ∈ L(E). On dit que u est trigonalisable s’il existe une base B de Etelle que MatB(u) est triangulaire supérieure.
Définition 2.26 Soit A ∈ Mn(K). On dit que A est trigonalisable s’il existe P ∈ GLn(K)telle que P−1AP soit triangulaire supérieure.
Remarque 2.27 Soient B une base de E, u ∈ L(E) et A = MatB(u). Alors u est trigonalisablesi et seulement si A est trigonalisable.
theo:trigo-pol-scinde Théorème 2.28 Soit u ∈ L(E). Alors u est trigonalisable si et seulement si χu est scindé dansK[X] (i.e. χu se décompose en un produit de polynômes du premier degré).
Preuve:— (⇒) Si u est trigonalisable alors il existe une base B telle que :
MatB(u) =
a11 · · · · · · a1n
0. . .
......
. . ....
0 · · · 0 ann
Notant T = MatB(u), on en déduit immédiatement que χu(x) = det(T−xIn) =
n∏i=1
(aii−x)
ce qui signifie que χu est scindé.
36 CHAPITRE 2. RÉDUCTION DES ENDOMORPHISMES
— (⇐) On suppose que χu est scindé et on veut montrer que u est trigonalisable.Nous allons raisonner par récurrence sur n = dim(E). Si n = 1 l’affirmation est immédiate.En supposant que pour n > 2 l’affirmation est vraie quand dim(E) = n − 1, montronsqu’elle est encore vraie quand dim(E) = n.Donc soit E un K-espace vectoriel de dimension n et soit u ∈ L(E) tel que χu soitscindé. Cela entraîne que Sp(u) 6= ∅. Soit λ ∈ Sp(u) et soit e1 un vecteur propre associé.Complétons e1 par des vecteurs e2, · · · , en pour que B = (e1, · · · , en) soit une base de E.Alors :
MatB(u) = M =
λ m12 · · · · · · · · · m1n
0...... M1...0
Donc χu(x) = (λ − x)det(M1 − xIn−1). D’autre part on a E = Ke1 ⊕ F où F =Vect(e2, · · · , en). Soit g l’endomorphisme de E défini par :
MatB(g) =
0 0 · · · · · · · · · 00...... M1...0
Remarquons que pour tout i ∈ {2, · · · , n} :
u(ei) = m1ie1 + g(ei)
Ainsi pour tout v ∈ F il existe a ∈ K tel que :
u(v) = ae1 + g(v)
D’autre part on a évidemment g(F ) ⊂ F . Donc g|F ∈ L(F ) et Mat{e2,··· ,en}(g|F ) = M1.Or χu(x) = (λ − x)det(M1 − xIn−1) = (λ − x)χM1(x). Comme χu est scindé, il s’ensuitque χM1 est scindé et on peut appliquer l’hypothèse de récurrence. Il existe une base(f2, · · · , fn) de F telle que :
Mat{f2,··· ,fn}(g|F ) =
α22 α23 · · · α2n
0 α33 · · · α3n...
. . . . . ....
0 · · · 0 αnn

2.2. TRIGONALISATION ET THÉORÈME DE CAYLEY-HAMILTON 37
Comme E = Ke1 ⊕ F , B′ = {e1, f2, · · · , fn} est une base de E. Pour tout j ∈ {2, · · · , n}il existe a1j ∈ K tel que :
u(fj) = a1je1 + g(fj) = a1je1 +
j∑i=2
αijfi
Il s’ensuit que MatB′(u) est triangulaire supérieure.
On donne une autre preuve de l’implication χu scindé ⇒ u trigonalisable.
Définition 2.29 (Espace vectoriel quotient) Soit E un K-espace vectoriel et F ⊂ E unsous-espace vectoriel. Il existe une unique structure d’espace vectoriel sur le groupe quotient E/Ftelle que π : E → E/F soit une application linéaire.
Preuve: En effet, on a nécessairement
λ · v = λv (2.1) equa:quotient
si π est linéaire. Réciproquement, la formule (equa:quotient2.1) définit une structure d’espace vectoriel sur
E/F .
pro:quotient Proposition 2.30 (Passage au quotient) Soit f : E → G une application linéaire et F ⊂ E
un sous-espace vectoriel. On peut former un diagramme commutatif Ef //
π��
G
E/Ff
==si et seulement
si f(F ) = {0}. Dans ce cas, il existe une unique application f : E/F → G telle que ce diagrammecommute.
Preuve: Si on peut définir f , alors pour v ∈ F , on a f(v) = f(π(v)) = f(0) = 0.Réciproquement, si f(F ) = {0}, alors la formule f(v) = f(v) définit bien une application
f : E/F → G, et c’est la seule qui fait commuter le diagramme.Soit donc u : E → E telle que χu est scindé. Soit λ ∈ K tel que χu(λ) = 0. Alors λ est une
valeur propre de u, soit donc v ∈ E tel que u(v) = λv. On définit F = K · v et on forme lediagramme E
u //
u′ !!
E .
π��
E/F
Comme u(v) = λv, on a u(F ) ⊂ F et donc u′(F ) = 0. D’après le Propositionpro:quotient2.30, on obtient un
diagramme Eu′ //
π
��
E/F
E/F
u
;;
En mettant ensemble les deux diagrammes précédent, on obtient
38 CHAPITRE 2. RÉDUCTION DES ENDOMORPHISMES
E
π��
u //
u′ ##
E
π��
E/Fu// E/F
On a alors le lemme suivant, qui relie la matrice de u à celle de u :
lem:u-barre Lemme 2.31 Soit B = (e1, · · · , en) une base de E avec e1 = v. Alors B = (e2, · · · , en) est unebase de E/F . En particulier, dim(E/F ) = dim(E)− dim(F ).
De plus, MatB(u) est la matrice extraite de MatB(u) obtenue en supprimant la première ligneet la première colonne.
Preuve: Soit η ∈ E/F et soit w ∈ E tel que w = η. Alors il existe des scalaires λi tels quew =
∑i≥1 λiei. On en déduit que w =
∑i≥2 λiei. Ainsi η =
∑i≥2 λiei. Donc (e2, · · · , en) est une
famille génératrice de E/F .Par ailleurs, si on a une relation
∑i≥2 λiei = 0, alors on en déduit que
∑i≥2 λiei ∈ F par
définition de E/F , donc il existe λ1 tel que∑
i≥2 λiei = −λ1e1, et donc∑
i≥1 λiei = 0, et donctous les λi sont nuls, puisque B est une famille libre.
Ceci démontre que B est une base. Par le diagramme commutatif définissant u, si u(ej) =∑i ai,jei, alors u(ej) =
∑i≥2 ai,jei. Ceci montre que la matrice de u est la matrice extraite
annoncée.
On termine alors la preuve du théorème comme suit : d’après le Lemmelem:u-barre2.31, la matrice de
u dans la base B s’écrit
MatB(u) =
λ a12 · · · · · · · · · a1n0...... MatB(u)...0
(2.2) equa:mat-u
En développant le déterminant de MatB(u) − xIn par rapport à la première colonne, on endéduit que χu(x) = (λ− x)χu(x). Comme χu est scindé, si on note µi ses racines comptées avecmultiplicités, de sorte que χu(x) =
∏i(µi − x), on a
∏i(µi − λ) = 0. On en déduit l’existence
d’un entier i tel que µi = λ. Alors, χu(x) =∏j 6=i(µj − x). En particulier, χu est scindé.
On a dim(E/F ) = dim(E) − 1 ; en argumentant par récurrence sur dim(E), on peut doncsupposer qu’il existe une base B′ = (e′2, · · · , e′n) de E/F telle que MatB′(u) soit triangulairesupérieure. D’après la relation (
equa:mat-u2.2) appliquée avec B′, la matrice de u dans la base (e1, e
′2, · · · , e′n)
est triangulaire supérieure.
Exercice de cours 2.16 Soit A une matrice carrée d’ordre 2 à coefficients réels et soit χA sonpolynôme caractéristique. Soit ∆ le discriminant de χA.
1. Si ∆ < 0, montrer que A est diagonalisable sur C mais pas sur R.

2.2. TRIGONALISATION ET THÉORÈME DE CAYLEY-HAMILTON 39
2. Si ∆ = 0, montrer que A est trigonalisable sur R. Donner un exemple où A n’est pasdiagonalisable sur R.
3. Si ∆ > 0, montrer que A est diagonalisable sur R.
Corollaire 2.32 Soit E un espace vectoriel sur C de dimension finie. Alors tout endomorphismede E est trigonalisable.
Preuve: C’est une conséquence du fait que C est algébriquement clos (i.e. tout polynôme àcoefficients dans C est scindé).
Remarque 2.33 Si un endomorphisme u est trigonalisable alors sa matrice dans une base ap-propriée est triangulaire supérieure et sur la diagonale principale figurent les valeurs propres deu, chacune d’elle y figurant autant de fois que son ordre de multiplicité dans χu.
Corollaire 2.34 Si χu est scindé, c’est-à-dire si χu(x) =
n∏i=1
(λi − x) alors tr(u) =n∑i=1
λi et
det(u) =n∏i=1
λi.
2.2.2 Polynômes d’endomorphismes
Soit u un endomorphisme de E. On rappelle que pour tout i ∈ N?, ui est défini par récurrencede la façon suivante :
1. u0 = IdE .2. Pour tout entier i > 1, ui = u ◦ ui−1.
On a alors les propriétés suivantes, pour tout (p, q) ∈ N on a :1. up ◦ uq = up+q = uq ◦ up.2. (up)q = upq = (uq)p
Définition 2.35 Soit u un endomorphisme de E. On appelle polynôme de l’endomorphisme utout endomorphisme de la forme :
P (u) =k∑i=0
aiui
où P (X) =
k∑i=0
aiXi est un polynôme de K[X].
Remarque 2.36 De même si A est une matrice de Mn(K) et P (X) =k∑i=0
aiXi un polynôme
de K[X], on pose :
P (A) =
k∑i=0
aiAi

40 CHAPITRE 2. RÉDUCTION DES ENDOMORPHISMES
Exercice de cours 2.17 Calculer P (A), P (B) et P (C) pour P (X) = X2 + X + 1, lorsqueA,B,C sont les matrices des exercices
exo:matA2.1 et
exo:matBC2.6.
Proposition 2.37 Soient u et v deux endomorphismes de E, P et Q deux polynômes de K[X]et (λ, µ) ∈ K2. Alors :
1. (λP + µQ)(u) = λP (u) + µQ(u).2. (PQ)(u) = P (u) ◦Q(u) = Q(u) ◦ P (u) = (QP )(u).3. Si B est une base de E, alors MatB(P (u)) = P (MatB(u)).
Remarque 2.38 Cette proposition ne dit rien d’autre que pour tout u ∈ L(E) l’application :
Φu : K[X] −→ L(E)P (X) 7−→ P (u)
est un morphisme de K-algèbres. Plus précisément cela signifie que :— Φu est une application linéaire du K-espace vectoriel K[X] dans le K-espace vectorielL(E).
— ∀(P,Q) ∈ K[X]2 , Φu(PQ) = Φu(P ) ◦ Φu(Q).— Φu(1) = u0 = IdE.
D’autre part, le point 2. de la proposition dit que si P (X) = (X − a1)α1 · · · (X − ar)αr alors :
P (u) = (u− a1IdE)α1 ◦ · · · ◦ (u− arIdE)αr
2.2.3 Théorème de Cayley-Hamilton
theo:cayley-hamilton Théorème 2.39 (Cayley-Hamilton) Soit u un endomorphisme de E, alors :
χu(u) = 0
Commençons par traiter un exemple : soit M la matrice ayant tous les coefficients nuls sauf surla sur-diagonale, où ils sont égaux à 1 : M = (ai,j) avec ai,i+1 = 1 et ai,j = 0 pour j 6= i+ 1. Ona alors χM (x) = (−x)n. Montrons que Mn = 0. Pour cela, soit Vi ⊂ Kn le sous-espace vectorielengendré par e1, · · · , ei, avec la convention V0 = {0}. On a M · ei = ei−1 donc M ·Vi ⊂ Vi−1. Onen déduit que
Mn · Vn ⊂Mn−1 · Vn−1 ⊂Mn−2 · Vn−2 ⊂ · · · ,de telle sorte que finalement Mn · Vn = {0} et donc Mn = 0.
Preuve: Comme Mn(R) ⊂ Mn(C), il suffit de montrer le théorème dans le cas où K = C.Ainsi u est trigonalisable. Donc soit B = {e1, · · · , en} une base dans laquelle T = MatB(u) esttriangulaire supérieure. Notons λ1, · · · , λn, les valeurs propres de u telles que :
T =
λ1O . . .λn
Posons V0 = {0} et pour tout k ∈ {1, · · · , n} soit Vk := Vect(e1, · · · , ek). Alors on a le lemme
suivant :

2.2. TRIGONALISATION ET THÉORÈME DE CAYLEY-HAMILTON 41
Lemme 2.40 Pour tout k ∈ {1, · · · , n}, (u− λkIdE )(Vk) ⊂ Vk−1.
Preuve: Soit k ∈ {1, · · · , n} et j ∈ {1, · · · , k}. Comme T est triangulaire supérieure il existedes scalaires α1j , · · · , αjj tels que :
(u− λkIdE )(ej) =
j∑i=1
αijei − λkej
Si j < k, alors (u−λkIdE )(ej) ∈ Vk−1. Si j = k, comme αkk = λk, on a aussi (u−λkIdE )(ej) ∈Vk−1.
Poursuivons maintenant la preuve du théorème. Soit maintenant x ∈ E = Vn. Alors d’aprèsle lemme précédent :
(u− λnIdE )(x) ∈ Vn−1 , (u− λn−1IdE ) ◦ (u− λnIdE )(x) ∈ Vn−2 , · · · ,(u− λ2IdE ) ◦ · · · ◦ (u− λnIdE )(x) ∈ V1
Comme V1 n’est rien d’autre que le sous-espace propre associé à λ1, on a :
(u− λ1IdE ) ◦ · · · ◦ (u− λnIdE )(x) = 0
et comme χu(u)(x) = (−1)n(u− λ1IdE ) ◦ · · · ◦ (u− λnIdE )(x), il s’ensuit que χu(u) = 0.
exem:UV Exemple 2.41 On considère deux exemples pour illustrer ce théorème et la théorie du polynôme
minimal. Soit U =
(2 10 2
)et V =
(2 00 2
). Come ces matrices sont triangulaires supérieures, on
calcul facilement leurs polynômes caractéristiques : χU (X) = χV (X) = (X − 2)2. On vérifie
le théorème de Cayley-Hamilton : U − 2I2 =
(0 10 0
)et V − 2I2 =
(0 00 0
). On a donc bien
(U − 2I2)2 = 0 et (V − 2I2)
2 = 0.
Exercice de cours 2.18 Vérifier le théorème de Cayley-Hamilton pour les matrices A,B,Cci-dessus.
exo:matM Exercice de cours 2.19 Soit M la matrice
M =
2 1 1 2 04 4 3 5 −20 0 1 1 0−2 −1 −1 −1 1
2 2 2 4 1
Montrer que χM (X) = (X − 1)3(X − 2)2. Vérifier que χM (M) = 0 (pour cela garder la formefactorisée de χM !).
42 CHAPITRE 2. RÉDUCTION DES ENDOMORPHISMES
2.3 Polynôme minimal
2.3.1 Théorème de décomposition des noyaux
decompnoyau Théorème 2.42 Soient u ∈ L(E), P1, · · · , Pk des polynômes de K[X] premiers entre eux deux
à deux et P =k∏i=1
Pi. Alors :
Ker(P (u)) =k⊕i=1
Ker(Pi(u))
Preuve: Si k = 1, le résultat est évident.Si k = 2, alors P = P1P2 et P1 et P2 sont premiers entre eux. D’après le théorème de Bezout,
il existe deux polynômes U1 et U2 tels que :
1 = U1P1 + U2P2
Il s’ensuit que :IdE = U1(u) ◦ P1(u) + U2(u) ◦ P2(u)
Soit x ∈ Ker(P1(u)) ∩Ker(P2(u)). Alors la relation précédente entraîne que :
x = U1(u)(P1(u)(x)) + U2(u)(P2(u)(x)) = 0
Donc Ker(P1(u)) et Ker(P2(u)) sont en somme directe.Montrons maintenant que Ker(P (u)) ⊂ Ker(P1(u)) + Ker(P2(u)) :Soit x ∈ Ker(P (u)), alors :
x = U1(u)(P1(u)(x)) + U2(u)(P2(u)(x))
Or :P2(u)(U1(u)(P1(u)(x))) = U1(u)(P (u)(x)) = 0
Donc U1(u)(P1(u)(x)) ∈ Ker(P2(u)). De même U2(u)(P2(u)(x)) ∈ Ker(P1(u)). Finalement x ∈Ker(P1(u)) + Ker(P2(u)).
Montrons que Ker(P1(u)) + Ker(P2(u)) ⊂ Ker(P (u)) :Soit x ∈ Ker(P1(u)), alors P (u)(x) = P2(u)(P1(u)(x)) = 0 donc x ∈ Ker(P (u)) et Ker(P1(u)) ⊂
Ker(P (u)). De même Ker(P2(u)) ⊂ Ker(P (u)). Donc Ker(P1(u)) +Ker(P2(u)) ⊂ Ker(P (u)). Ona donc montré que :
Ker(P (u)) = Ker(P1(u))⊕Ker(P2(u))
Soit k > 3 et supposons le théorème démontré au rang k − 1. Montrons que le résultat estvrai au rang k. Soient P1, · · · , Pk des polynômes de K[X] premiers entre eux deux à deux et
P =k∏i=1
Pi. Alors les polynômes P1 et P2 · · ·Pk sont premiers entre eux et d’après ce qui a été
montré précédemment on a :
Ker(P (u)) = Ker(P1(u))⊕Ker(P2 · · ·Pk)(u) =k⊕i=1
Ker(Pi(u))
2.3. POLYNÔME MINIMAL 43
exo:noyaux-M Exercice de cours 2.20 Pour la matrice M ci-dessus, déterminer les sous-espaces vectorielsKer((M − I5)3) et Ker((M − 2I5)
2). Vérifier qu’ils sont supplémentaires dans R5. Retrouver cerésultat en utilisant le théorème de décomposition des noyaux.
2.3.2 Polynômes annulateurs, polynôme minimal
Commençons par quelques rappels.
Définition 2.43 Soit (A,+,×) un anneau. Alors on dit qu’un sous-ensemble I de A est unidéal si :
1. (I,+) est un sous-groupe de (A,+).
2. ∀a ∈ A , ∀x ∈ I , ax ∈ I.Un idéal est dit principal si I est engendré par un seul élément. Autrement dit I est principals’il existe α ∈ I tel que :
I = {yα ; y ∈ A}
Un anneau principal est un anneau dont tous les idéaux sont principaux.
L’anneau des polynômes K[X] est un anneau principal. C’est une conséquence de l’algorithmed’Euclide. En effet soit I un idéal de K[X]. Alors I est non vide. Si I = {0}, le résultat estévident.
Supposons I 6= {0}. Soit P0 un polynôme non nul de I de degré minimal. Soit P ∈ I. Eneffectuant la division euclidienne de P par P0, il existe des polynômes Q et R tels que :
P (X) = Q(X)P0(X) +R(X)
où deg(R) < deg(P0). Comme (I,+) est un idéal de K[X], P (X) − Q(X)P0(X) ∈ I. DoncR(X) ∈ I. Mais comme P0 un polynôme non nul de I de degré minimal, il s’ensuit que R(X) = 0et :
I = {Q(X)P0(X) ; Q(X) ∈ K[X]}
Donc K[X] est un anneau principal et tout idéal I de K[X] est engendré par tout polynôme nonnul de I de degré minimal. De plus il n’est pas difficile de voir qu’il existe un unique polynômeunitaire (i.e. dont le terme de plus haut degré vaut 1) de I de degré minimal qui engendre I.Résumons tout ceci dans la proposition qui suit :
anneauprinc Proposition 2.44 L’anneau K[X] des polynômes est principal et tout idéal I tel que I 6= {0}est engendré par un unique polynôme unitaire de I de degré minimal.
Proposition et définition 2.45 Soit u ∈ L(E). Considérons le sous-ensemble de K[X] sui-vant :
I(u) = {P ∈ K[X] ; P (u) = 0}
Alors I(u) est un idéal de K[X] appelé idéal annulateur de u.Tout polynôme P de I(u) est appelé polynôme annulateur de u.

44 CHAPITRE 2. RÉDUCTION DES ENDOMORPHISMES
Preuve: Le polynôme nul appartient à I(u), donc I(u) 6= ∅. Soient (P,Q) ∈ (I(u))2. Alors :
(P −Q)(u) = P (u)−Q(u) = 0
Donc I(u) est un sous-groupe de (K[X],+). D’autre part pour tout A ∈ K[X] :
(AP )(u) = A(u) ◦ P (u) = 0
Donc AP ∈ I(u) et I(u) est un idéal de K[X].
exem:ideal Exemple 2.46 Soit W =
(0 10 0
). Alors Wn = 0 si n ≥ 2. Donc, pour P (X) = a0 + a1X +
a2X2 + · · · , on a P (W ) = a0I2 + a1W . L’annulateur de W est donc l’ensemble des polynômes
P (X) = a0 + a1X + a2X2 + · · · avec a = 0 = a1 = 0. On vérifiera que c’est un idéal de K[X].
On va maintenant étudier de façon similaire l’idéal annulateur des matrices U et V de l’Exempleexem:UV2.41. Pour cela, on établit un lemme préliminaire :
lem:taylor Lemme 2.47 Soit P ∈ K[X] de degré n et c ∈ K. Il existe d’uniques coefficients a0, · · · , an ∈ Ktels que
P (X) = an(X − c)n + an−1(X − c)n−1 + · · ·+ a1(X − c) + a0 (2.3) equa:taylor
Preuve: En effet, l’équationequa:taylor2.3 est équivalente à l’équation
P (X + c) = anXn + an−1X
n−1 + · · ·+ a1X + a0.
Les coefficients ai sont donc les coefficients du polynôme P (X + c).
exem:idealUV Exemple 2.48 Un polynôme P est dans l’idéal annulateur de U , resp. V , si et seulement si 2est une racine double, resp. simple de P .
Preuve: Soit P ∈ K[X] ; écrivons le à l’aide du Lemmelem:taylor2.47 sous la forme
P (X) = an(X − 2)n + an−1(X − 2)n−1 + · · ·+ a2(X − 2)2 + a1(X − 2) + a0.
On a alors
P (U) = an(U − 2I2)n + an−1(U − 2I2)
n−1 + · · ·+ a2(U − 2I2)2 + a1(U − 2I2) + a0I2.
Comme U − 2I2 =
(0 10 0
)est de carré nul, on a donc P (U) = a1(U − 2I2) + a0I2. Ainsi, P (U)
est nul si et seulement si a0 = a1 = 0, ce qui équivaut à dire que 2 est une racine double de P .Pour V , le raisonnement est similaire, à ceci près que V − 2I2 = 0. On a donc P (V ) = a0I2.
Ainsi, P (V ) est nul si et seulement si a0 = 0, ce qui équivaut à dire que 2 est une racine de P .
Proposition et définition 2.49 Soit u ∈ L(E). Alors I(u) 6= {0} et il existe un unique poly-nôme unitaire µu de I(u) de degré minimal qui engendre I(u).
Autrement dit µu est l’unique polynôme annulateur de u, unitaire de degré minimal qui divisetous les autres polynômes annulateurs de u.
µu s’appelle le polynôme minimal de u.

2.3. POLYNÔME MINIMAL 45
Preuve: D’après le théorème de Cayley-Hamilton, χu(u) = 0. Comme degχu = n, χu estun polynôme non nul et I(u) 6= {0}. D’après la proposition
anneauprinc2.44 il existe un unique polynôme
unitaire µu de I(u) de degré minimal qui engendre I(u). Cela revient à dire que :
I(u) = {P (X)µu(X) ;P (X) ∈ K[X]}
Exercice de cours 2.21 Soit N ∈ M2(R) une matrice telle que N2 = I2. Montrer qu’on atrois possibilités pour µN : soit µN (X) = X − 1, soit µN (X) = X + 1, soit µN (X) = X2 − 1.
Remarque 2.50 Le degré m du polynôme minimal vérifie toujours m > 1.
Exemple 2.51 L’exempleexem:ideal2.46 montre que l’idéal annulateur de W est l’ensemble des multiples
de X2. Ainsi, µW (X) = X2. De façon similaire, l’exempleexem:idealUV2.48 montre que l’idéal annulateur de
U resp. V est l’ensemble des multiples de (X − 2)2 resp. X − 2. On a donc µU (X) = (X − 2)2
et µV (X) = X − 2.
Exercice de cours 2.22 Soit A la matrice de l’exerciceexo:matA2.1 et soit µA son polynôme minimal.
1. Montrer que µA divise (X + 1)(X − 1).Il y a donc trois cas de figure possible : µA est un des trois polynômes (X + 1), (X − 1) et(X + 1)(X − 1).
2. Les polynômes X − 1 et X + 1 annulent-ils A ?
3. En déduire que µA(X) = (X + 1)(X − 1).
On remarque que l’unique racine de χW et µW est 0, et que l’unique racine de χU , χV , µU et µVest 2.
Proposition 2.52 Le polynôme minimal et le polynôme caractéristique ont exactement les mêmesracines.
Preuve: Soit λ une racine de χu. Alors λ est une valeur propre de u. Soit x un vecteurpropre de u associé à λ. Il est facile de voir que pour tout entier i > 0 : ui(x) = λix. Donc si
µu(X) =
k∑i=0
aiXi, alors :
0 = µu(u)(x) =k∑i=0
aiui(x) =
(k∑i=0
aiλi
)x = µu(λ)x
Comme x est non nul car x est un vecteur propre, µu(λ) = 0 et λ est une racine de µu.Réciproquement, comme µu divise χu, les racines de µu sont des racines de χu.
Fin de la séance du 18/10/2018

46 CHAPITRE 2. RÉDUCTION DES ENDOMORPHISMES
Exercice de cours 2.23 Pour les matrices B et C de l’exerciceexo:matBC2.6, montrer qu’on a
µB(X) = (X − 2)(X − 1)2 ; µC(X) = (X − 2)(X − 1).
Pour cela, on pourra utiliser la relation µB|χB, et la proposition précédante.
Exercice de cours 2.24 Soit M la matrice de l’exerciceexo:matM2.19. Montrer que
µM (X) = χM (X) = (X − 1)3(X − 2)2.
Exercice de cours 2.25 Soit N ∈ M2(R) une matrice telle que N2 = I2. Montrer que lesracines de χN appartiennent à {−1, 1}.
Observons que µU (X) = (X−2)2, µV (X) = X−2 et µW (X) = X2. Par ailleurs, V est diagonale,U et W sont triangulaires supérieures. Les matrices U et W ne sont pas diagonalisables car leurunique espace propre est de dimension 1 (en effet U − 2I2 et W sont de rang 1). Ceci illustre lecritère de diagonalisabilité suivant :
caracdiagpolymini Théorème 2.53 Soit u ∈ L(E). Alors u est diagonalisable si et seulement si son polynômeminimal est scindé et si toutes ses racines sont simples.
Preuve:— (⇒) Supposons que u est diagonalisable. Soient λ1, · · · , λr les valeurs propres de u (comp-
tées sans multiplicité - autrement dit λ1, · · · , λr sont distincts). Considérons le polynôme :
M(X) = (X − λ1) · · · (X − λr)
Comme u est diagonalisable,E =r⊕i=1
Eλi(u). Donc soit x ∈ E, alors il existe (x1, · · · , xr) ∈
Eλ1(u)× · · · × Eλr(u) tel que :x = x1 + · · ·+ xr
Or :
M(u)(xi) =
∏16j6rj 6=i
(u− λjIdE)
((u− λiIdE)(xi)) = 0
DoncM(u)(x) = 0 pour tout x ∈ E etM(u) = 0. DoncM est un polynôme annulateur deu et µu diviseM . Comme les racines de µu sont exactement les valeurs propres λ1, · · · , λr,il s’ensuit que µu = M et µu est scindé et n’a que des racines simples.
— (⇐) Supposons que µu est scindé et n’a que des racines simples. Alors :
µu(X) = (X − λ1) · · · (X − λr)

2.4. PROJECTEURS 47
et λ1, · · · , λr sont les valeurs propres de u. D’après le théorèmedecompnoyau2.42 :
E = Ker(µu(u)) =r⊕i=1
Ker(u− λiIdE) =r⊕i=1
Eλi(u)
Donc E est la somme directe des sous-espaces propres de u ce qui signifie que u estdiagonalisable.
Corollaire 2.54 Soit u ∈ L(E). Alors u est diagonalisable si et seulement si il existe un poly-nôme annulateur de u qui est scindé et qui n’admet que des racines simples.
Preuve:— (⇒) On suppose que u est diagonalisable. Alors d’après le théorème précédent µu est
scindé et n’a que des racines simples. De plus c’est un polynôme annulateur.— (⇐) Réciproquement supposons qu’il existe un polynôme annulateur P de u qui est scindé
et qui n’admet que des racines simples. Comme µu divise P , il s’ensuit que µu est scindéet n’a que des racines simples ce qui implique d’après le théorème précédent que u estdiagonalisable.
Exercice de cours 2.26 Soit N ∈ M2(R) une matrice telle que N2 = I2. Montrer que N estdiagonalisable. Quelles peuvent être les valeurs propres de N ? Montrer que la trace de N vaut−2, 0 ou 2.
2.4 Projecteurs
Soient F et G deux sous-espaces vectoriels supplémentaires dans E : E = F ⊕G. Pour toutx de E il existe un unique couple (p(x), q(x)) ∈ F ×G tel que x = p(x) + q(x).
Proposition 2.55 Les applications p et q sont des endomorphismes de E. p s’appelle le pro-jecteur sur F parallèlement à G et q s’appelle le projecteur sur G parallèlement à F .
Remarque 2.56 On a p+ q = IdE.
Proposition 2.571. Soient F et G deux sous-espaces vectoriels de E supplémentaires dans E et p le projecteur
sur F parallèlement à G. Alors on a : p ◦ p = p, Im(p) = F et Ker(p) = G.De plus si q est le projecteur sur G parallèlement à F , alors p ◦ q = q ◦ p = 0.
2. Réciproquement, soit p ∈ L(E) tel que p ◦ p = p. Alors :
E = Im(p)⊕Ker(p)
et p est le projecteur sur Im(p) parallèlement à Ker(p).

48 CHAPITRE 2. RÉDUCTION DES ENDOMORPHISMES
Preuve: Prouvons d’abord le point 1). Soit x ∈ E. Alors p(x) = p(x) + 0 et (p(x), 0) ∈ F ×G.Donc par unicité de la décomposition p(p(x)) = p(x) et p ◦ p = p.
Déterminons Im(p). Comme pour tout x ∈ E, p(x) ∈ F , il est évident que Im(p) ⊂ F .D’autre part pour tout x dans F , on a x = x + 0 et (x, 0) ∈ F × G. Donc x = p(x) ∈ Im(p).Ainsi Im(p) = F .
Déterminons Ker(p). Pour tout x de G, x = 0 + x et (0, x) ∈ F × G, donc p(x) = 0, d’oùG ⊂ Ker(p). Réciproquement soit x ∈ G, alors x = p(x) + q(x) = 0 + x et par unicité de ladécomposition p(x) = 0. Donc Ker(p) ⊂ G. Ainsi Ker(p) = G.
Montrons maintenant le point 2). Soit x ∈ Ker(p) ∩ Im(p). Alors p(x) = 0 et il existe y ∈ Etel que p(y) = x. D’où :
0 = p(x) = p(p(y)) = (p ◦ p)(y) = p(y) = x
Ceci montre que Im(p) ∩ Ker(p) = {0} et donc Im(p) et Ker(p) sont en somme directe. Soitx ∈ E. Alors x = p(x) + (x − p(x)). Or p(x − p(x)) = p(x) − (p ◦ p)(x) = 0. Donc x − p(x) ∈Ker(p). Ceci montre que E = Im(p) +Ker(p). Nous avons donc montré que Im(p) et Ker(p) sontsupplémentaires dans E.
Puisque pour tout x ∈ E, x = p(x) + (x − p(x)) avec p(x) ∈ Im(p) et x − p(x) ∈ Ker(p), pest le projecteur sur Im(p) parallèlement à Ker(p).
Exercice de cours 2.27 Soit, dans R2, les sous-espaces vectoriels F et G engendrés respec-tivement par (1, 1) et (1,−1). Ecrire les matrices P resp. Q des projections sur F (resp. G)parallèlement à G (resp. F ). Vérifier que P +Q = I2, P
2 = P,Q2 = Q.
Remarque 2.58 L’application linéaire q = IdE − p est le projecteur sur Ker(p) parallèlement àIm(p), Ker(q) = Im(p) et Im(q) = Ker(p).
Proposition et définition 2.59 Soient F1, . . . , Fk des sous-espaces vectoriels de E tels que
E =
k⊕i=1
Fi. Alors pour tout x ∈ E, il existe un unique k-uplet (p1(x), . . . , pk(x)) ∈ F1× . . .×Fk
tel que : x =k∑i=1
pi(x).
Les applications pi sont des endomorphismes et (pi)16i6k s’appelle famille de projecteurs
de E associée à la décomposition E =k⊕i=1
Fi.
Proposition 2.60
1. Soit (pi)16i6k une famille de projecteurs de E associée à la décomposition E =k⊕i=1
Fi.
Alors : pour tout (i, j) ∈ {1, . . . , k}2 :
— (i) IdE =k∑i=1
pi.

2.4. PROJECTEURS 49
— (ii) pi ◦ pi = pi.— (iii) pi ◦ pj = 0 si i 6= j.
De plus Im(pi) = Fi et Ker(pi) =k⊕j=1j 6=i
Fj pour tout i ∈ {1, . . . , k}.
2. Réciproquement soit (pi)16i6k une famille d’endomorphismes de E vérifiant les propriétés
(i), (ii) et (iii). Alors E =
k⊕i=1
Im(pi) et (pi)16i6k est la famille de projecteurs associés à
cette décomposition.
Remarque 2.61 Soit E =r⊕i=1
Fi et (pi)16i6r la famille de projecteurs associée à (Fi)16i6r. Pour
v un endomorphisme tel que pour tout i ∈ {1, · · · , r}, Fi est stable par v, on a v ◦ pi = pi ◦ v.
Preuve: Pour montrer l’égalité des applications linéaires v ◦ pi et pi ◦ v, il suffit de montrerque pour x ∈ Fj avec 1 ≤ j ≤ r, on a v ◦ pi(x) = pi ◦ v(x). Or, si j 6= i, on a pi(Vj) = {0}, doncv ◦ pi(x) = pi ◦ v(x) = 0. Si j = i, on a v ◦ pi(x) = pi ◦ v(x) = v(x).
prodiag Proposition 2.62 Soit u ∈ L(E). Alors u est diagonalisable si et seulement si il existe desscalaires λ1, · · · , λr et une famille de sous-espaces vectoriels (Fi)16i6r tels que :
E =r⊕i=1
Fi et u =r∑i=1
λipi
où (pi)16i6r est la famille de projecteurs associée à (Fi)16i6r. Dans ce cas Sp(u) = {λ1, · · · , λr}et Fi = Eλi(u) pour tout i ∈ {1, · · · , r}.
Preuve: Supposons que u est diagonalisable. Par le théorèmecriterediag2.19, E est somme directe de ses
sous-espaces propres :E =
⊕i
Eλi(u) .
Si on note Fi = Eλi(u) et (pi) la famille de projecteurs associée à cette décomposisition, il resteà montrer que u =
∑i λipi. Pour montrer que pour tout x de E, u(x) =
∑i λipi(x), on peut,
par linéarité, supposer qu’il existe i tel que x ∈ Fi. Alors, on a u(x) = λix et∑
j λjpj(x) = λix.Donc l’égalité est établie.
Supposons maintenant qu’il existe (Fi) et (λi) tels que{E =
⊕i Fi
p =∑
i λipi
Alors, on vérifie comme ci-dessus que pour x ∈ Fi, on a∑
j λjpj(x) = λix, de sorte que Fi ⊂Eλi(u). On raisonne sur les dimensions pour en déduire que Fi = Eλi(u) : l’inclusion déjà établiedonne dim(Fi) ≤ dim(Eλi(u)). D’où dimE =
∑dim(Fi) ≤
∑dim(Eλi(u)) ≤ dimE, de sorte
que toutes ces inégalités sont des égalités, et donc Fi = Eλi(u). On en déduit E =⊕Eλi(u), et
donc que u est diagonalisable.Fin de la séance du 26/10/2018

50 CHAPITRE 2. RÉDUCTION DES ENDOMORPHISMES
Exercice de cours 2.28 Soit F ⊂ R3 le sous-espace vectoriel engendré par (1,−2, 3), et soit Gle sous-espace vectoriel engendré par (1,−1, 0) et (0, 0, 1). Calculer la matrice P de la projectionsur F parallèlement à G et la matrice Q de la projection sur G parallèlement à F . Calculer2P + Q et comparer le résultat à la matrice C de l’exercice
exo:matBC2.6. Pouvez vous expliquer ce que
vous constatez ?
Remarque 2.63projitere
— Si E =r⊕i=1
Fi et u =r∑i=1
λipi où (pi)16i6r est la famille de projecteurs associée à
(Fi)16i6r, alors pour tout entier k > 0 :
uk =
r∑i=1
λki pi
— Plus généralement si (u1, · · · , ur) ∈ L(E)r et si pour tout i ∈ {1, · · · , r} les sous-espaces
Fi sont stables par ui, alors l’endomorphisme u =
r∑i=1
ui◦pi vérifie pour tout entier k > 0 :
uk =r∑i=1
uki ◦ pi
Il semble que ce serait préférable de mettre cette section après le Théorèmecriterediag2.19.
2.5 Sous-espaces caractéristiques et décomposition de Dunford-Jordan
2.5.1 Indice d’un endomorphisme et endomorphismes nilpotents
noyauitere Proposition 2.64 Soit u ∈ L(E). Alors :
1. Pour tout entier k > 0, Ker(uk) ⊂ Ker(uk+1).
2. La suite (Ker(uk))k∈N est stationnaire. Autrement dit :
∃j > 0 ; ∀k > j , Ker(uj) = Ker(uk)
3. Si j est un entier tel que Ker(uj) = Ker(uj+1) alors :
∀k > j , Ker(uj) = Ker(uk)
4. Soit i0 le plus petit entier tel que Ker(ui0) = Ker(ui0+1). Alors i0 6 dim(E).
Preuve:

2.5. SOUS-ESPACES CARACTÉRISTIQUES 51
1. Soit k ∈ N et soit x ∈ Ker(uk), alors :
uk+1(x) = u(uk(x)) = u(0) = 0
Donc x ∈ Ker(uk+1) et Ker(uk) ⊂ Ker(uk+1).2. Considérons la suite (dim(Ker(uk)))k∈N. Comme Ker(uk) ⊂ Ker(uk+1) ⊂ E, dim(Ker(uk)) 6
dim(Ker(uk+1)) 6 dim(E) = n donc (dim(Ker(uk)))k∈N est une suite croissante d’entiersmajorée. Donc à partir d’un certain rang, la suite (dim(Ker(uk)))k∈N est stationnaire.Donc :
∃j > 0 ; ∀k > j , dim(Ker(uj)) = dim(Ker(uk))
Comme Ker(uj) ⊂ Ker(uk) pour tout k > j, il s’ensuit que Ker(uj) = Ker(uk) pour toutk > j.
3. Supposons que Ker(uj) = Ker(uj+1). Montrons que pour tout k > j, Ker(uk) = Ker(uk+1).Soit x ∈ Ker(uk+1), alors :
uk+1(x) = uj+1(uk−j(x)) = 0
Donc uk−j(x) ∈ Ker(uj+1), mais comme Ker(uj) = Ker(uj+1), uk−j(x) ∈ Ker(uj) et :
uj(uk−j(x)) = 0 = uk(x)
Donc x ∈ Ker(uk) et Ker(uk+1) ⊂ Ker(uk). Mais d’après le 1. on a aussi Ker(uk) ⊂Ker(uk+1). Finalement Ker(uk) = Ker(uk+1).
4. Soit i0 le plus petit entier tel que Ker(ui0) = Ker(ui0+1). Considérons l’application :
F : {0, · · · , i0} −→ {0, · · · , n}k 7−→ dim(Ker(uk))
D’après le point précédent, on a :
dim(Ker(u0)) < · · · < dim(Ker(ui0))
Donc F est injective et il s’ensuit que i0 6 n.
Définition 2.65 Soit u ∈ L(E). On appelle indice de u le plus petit entier i0 tel que Ker(ui0) =Ker(ui0+1).
Exercice de cours 2.29 Déterminer l’indice de B − I3 et celui de C − I3.
Remarque 2.66kerupnul— Si i0 > 0, alors d’après la définition de i0 et la proposition on a pour tout p > 1 :
{0} = Ker(u0) · · · Ker(ui0) = Ker(ui0+1) = · · · = Ker(ui0+p)

52 CHAPITRE 2. RÉDUCTION DES ENDOMORPHISMES
— Soit p ∈ N?. Alors Ker(up) = {0} si et seulement si Ker(u) = {0}. En effet Ker(u) ⊂Ker(up) donc l’égalité Ker(up) = {0} implique Ker(u) = {0}. Réciproquement, si Ker(u) ={0}, alors u est injective, et il en est de même de up pour tout p.
Le deuxième point résulte aussi de la Propositionnoyauitere2.64 dans le cas particulier i0 = 0.
Définition 2.67 Soit ν ∈ L(E). On dit que ν est un endomorphisme nilpotent s’il existe unentier k tel que νk = 0.
pro:nilpotent Proposition 2.68 Soit ν un endomorphisme nilpotent de E. Soit n0 l’indice de ν. Alors n0 estle plus petit entier tel que νn0 = 0 et on a n0 6 dim(E).
Preuve: Soit m le plus petit entier tel que νm = 0. Alors νm−1 6= 0 et :
Ker(νm−1) Ker(νm) = E
Il s’ensuit que Ker(νm) = Ker(νm+1) et m est l’indice de ν.
Exercice de cours 2.30 Donner un exemple d’endomorphisme nilpotent non nul.
diagnu Proposition 2.69 Soit ν un endomorphisme nilpotent de E. Alors Sp(ν) = {0}. De plus ν estdiagonalisable si et seulement si ν = 0.
Preuve: Soit n0 l’indice de ν. Alors νn0 = 0 et νn0−1 6= 0. Soit P (X) = Xn0 . Alors P est unpolynôme annulateur et comme le polynôme minimal de ν divise P , il s’ensuit que µν(X) = Xk
avec k 6 n0.D’après le théorème
caracdiagpolymini2.53, ν est diagonalisable si et seulement si µν est scindé (ce qui est
le cas) et µν n’a que des racines simples. Or µν n’a que des racines simples si et seulement siµν(X) = X. Mais dans ce cas µν(ν) = ν = 0.
Proposition 2.70 Soit d un endomorphisme diagonalisable de E. Alors d est nilpotent si etseulement si d = 0.
Exercice de cours 2.31 Soit ν un endomorphisme nilpotent de E et soit n0 son indice denilpotence.
1. Montrer que ν annule un polynôme scindé.
2. Quelles sont les valeurs propres de ν ?
3. Montrer qu’il existe une base de E dans laquelle la matrice de ν est strictement triangulairesupérieure (c’est-à-dire triangulaire supérieure avec des 0 sur la diagonale).
4. Montrer que νdim(E) = 0.
5. Retrouver le résultat de la Propositionpro:nilpotent2.68 selon lequel n0 ≤ dim(E).

2.5. SOUS-ESPACES CARACTÉRISTIQUES 53
2.5.2 Sous-espaces caractéristiques
Dans ce paragraphe u est un endomorphisme de E tel que χu soit scindé sur K. Soientλ1, · · · , λr les valeurs propres (distinctes) de u. Alors :
χu(X) = (−1)nr∏i=1
(X − λi)αi , µu(X) =r∏i=1
(X − λi)βi
On note d’autre part :
Cλi(u) := Ker(u− λiIdE)αi et Mλi(u) := Ker(u− λiIdE)βi
On a bien entendu 1 6 βi 6 αi.
Définition 2.71 Soit i ∈ {1, · · · , r}. Le sous-espace vectoriel Cλi(u) s’appelle le sous-espacecaractéristique associé à la valeur propre λi.
exo:esp-carac Exercice de cours 2.32 Déterminer C1(A),M1(A), C−1(A),M−1(A). Déterminer aussi C1(B)et M1(B).
Remarque 2.72stab— D’après le paragraphe précédent, on a :
Eλi(u) ⊂Mλi(u) ⊂ Cλi(u)
— Mλi(u) et Cλi(u) sont stables par u (i.e. u(Mλi(u)) ⊂Mλi(u) et u(Cλi(u)) ⊂ Cλi(u)).
indice Proposition 2.73 Soit i ∈ {1, · · · , r}. L’indice de u− λiIdE est βi. En particulier on a :
Mλi(u) = Cλi(u)
Preuve: Les polynômes des ensembles {(X − λi)αi ; 1 6 i 6 r} et {(X − λi)βi ; 1 6 i 6 r}sont premiers deux à deux. Comme χu et µu sont des polynômes annulateurs on a Ker(χu(u)) =Ker(µu(u)) = E et d’après le théorème
decompnoyau2.42 on a :
E =r⊕i=1
Mλi(u) =r⊕i=1
Cλi(u)
Donc :
dim(E) =
r∑i=1
dim(Mλi(u)) =
r∑i=1
dim(Cλi(u))
Doncr∑i=1
(dim(Cλi(u)− dim(Mλi(u)) = 0

54 CHAPITRE 2. RÉDUCTION DES ENDOMORPHISMES
Comme dim(Cλi(u))−dim(Mλi(u)) > 0, On a dim(Mλi(u)) = dim(Cλi(u)) et Mλi(u) = Cλi(u).On en déduit donc que l’indice i0 de u− λiIdE vérifie i0 6 βi.
Supposons que i0 < βi. Cela signifie alors que Ker(u − λiIdE)βi−1 = Ker(u − λiIdE)βi .Considérons alors le polynôme :
Q(X) =
∏16j6rj 6=i
(X − λj)βj
(X − λi)βi−1
Soit x ∈ E. Comme E =r⊕j=1
Mλj (u), il existe (x1, · · · , xr) ∈ Mλ1(u) × · · · ×Mλr(u) tel que :
x = x1 + · · · + xr. Pour tout j ∈ {1, · · · , r} tel que j 6= i, on a (u − λjIdE)βj (xj) = 0. De pluscomme Ker(u − λiIdE)βi−1 = Ker(u − λiIdE)βi = Mλi(u) on a (u − λiIdE)βi−1(xi) = 0. Doncpour tout j ∈ {1, · · · , r} Q(u)(xj) = 0 et :
Q(u)(x) = 0
Ceci pour tout x ∈ E. Donc Q est un polynôme annulateur de u. Mais deg(Q) < deg(µu) ce quicontredit la définition de µu. Donc i0 = βi.
pro:dim-esp-caracteristique Proposition 2.74 Pour tout i ∈ {1, · · · , r} on a :
dim(Cλi(u)) = m(λi)
Preuve: On montre d’abord que dim(Cλi(u)) ≤ m(λi) par une preuve analogue à celle dela Proposition
pro:inegalite-esp-propre2.17. Posons ni = dim(Cλi(u)). Comme Cλi(u) est stable par u, la restriction
ui = u|Cλi (u)est un endomorphisme de Cλi(u). De plus on a Ker(ui − λiIdCλi (u))
αi = Cλi(u).Donc le polynôme Q(X) = (X − λi)αi est un polynôme annulateur de ui et ceci montre queλi est l’unique valeur propre de ui. Soit Bi une base de Cλi(u) dans laquelle la matrice de uiest triangulaire supérieure. On complète Bi par une famille de vecteurs L de façon à ce queB = Bi ∪ L soit une base de E. Alors :
MatB(u) =
λi a12 · · · a1ni
0. . .
......
. . . . . . ani−1,ni0 · · · 0 λi
A
O B
On en déduit alors que :
χu(X) = (λi −X)niχB(X)
et donc (λi −X)ni divise χu(X). Cela implique que ni 6 αi. On a donc :
dim(E) =
r∑i=1
dim(Cλi(u)) =
r∑i=1
ni 6r∑i=1
αi = dim(E)
On déduit que ni = αi.Fin de la séance du 09/11/2018

2.5. SOUS-ESPACES CARACTÉRISTIQUES 55
Exercice de cours 2.33 Montrer que ce résultat est compatible avec les calculs d’espaces ca-ractéristiques que vous avez faits dans l’exercice
exo:esp-carac2.32.
2.5.3 Décomposition de Dunford-Jordan
Dunford Théorème 2.75 (Décomposisition de Dunford-Jordan) Soit u ∈ L(E) tel que χu soitscindé dans K[X]. Alors il existe un unique couple (d, ν) d’endomorphismes de E tel que :
1. u = d+ ν.2. d ◦ ν = ν ◦ d.3. d est diagonalisable et ν est nilpotent.
De plus si µu(X) =r∏i=1
(X − λi)βi , alors d =r∑i=1
λipi où (pi)16i6r est la famille de projecteurs
associés à la décomposition E =r⊕i=1
Cλi(u), et l’indice de ν est N = max16i6r
(βi).
Dunford a écrit la décomposition et Jordan a trouvé la base dans laquelle le nilpotent a la matriceusuelle.
Preuve: On a E =r⊕i=1
Cλi(u). Soit (pi)16i6r la famille de projecteurs associés à cette décom-
position. Posons d =r∑i=1
λipi. Alors d est un endomorphisme diagonalisable (voir propositionprodiag2.62). Posons maintenant ν = u− d. Alors :
ν = u−r∑i=1
λipi = u ◦r∑i=1
pi −r∑i=1
λipi =
r∑i=1
(u− λiIdE) ◦ pi
Montrons que ν ◦ d = d ◦ ν.
ν ◦ d =
(r∑i=1
(u− λiIdE) ◦ pi
)◦
r∑j=1
λjpj
=∑
16i,j6r
λj(u− λiIdE) ◦ pi ◦ pj
=∑
16i,j6r
λj(u− λiIdE) ◦ pj ◦ pi
Comme pour tout couple (i, j) ∈ {1, · · · , r}2, les sous-espaces Cλj (u) sont stables par (u−λiIdE)alors (u− λiIdE) ◦ pj = pj ◦ (u− λiIdE). Donc :
ν ◦ d =∑
16i,j6r
λjpj ◦ (u− λiIdE) ◦ pi
= d ◦ ν

56 CHAPITRE 2. RÉDUCTION DES ENDOMORPHISMES
Montrons maintenant que ν est nilpotent d’indiceN = max16i6r
(βi). Comme pour tout i ∈ {1, · · · , r},les sous-espaces Cλi(u) sont stables par (u− λiIdE), on a (voir la remarque
projitere2.63) :
νN =r∑i=1
(u− λiIdE)N ◦ pi
Or N > βi pour tout i ∈ {1, · · · , r} et βi est l’indice de u − λiIdE d’après la propositionindice2.73.
Donc Ker(u− λiIdE)N = Ker(u− λiIdE)βi = Cλi(u).Soit x ∈ E. Alors pour tout i ∈ {1, · · · , r}, pi(x) ∈ Ker(u − λiIdE)N . Donc pour tout
x ∈ E, νN (x) = 0 ce qui signifie que νN = 0 et ν est nilpotent. Soit j ∈ {1, · · · , r} telque βj = N . Alors dans ce cas Ker(u − λjIdE)N−1 Ker(u − λjIdE)N = Cλj (u). Donc soitx ∈ Cλj (u) \Ker(u− λjIdE)N−1. Alors pi(x) = 0 pour tout i 6= j et :
νN−1(x) =
r∑i=1
(u− λiIdE)N−1(pi(x)) = (u− λjIdE)N−1(x) 6= 0
Donc ν est nilpotent d’indice N .Il nous reste à montrer l’unicité du couple (d, ν). Soit (d′, ν ′) vérifiant les hypothèses 1, 2 et
3 du théorème. Notons N ′ l’indice de ν ′. Soit λ′ ∈ Sp(d′) et x ∈ Eλ′(d′) \ {0}. Alors comme u etd′ commutent :
0 = ν ′N′(x) = (u− d′)N ′(x) =
N ′∑k=0
(N ′
k
)(−1)N
′−k(uk ◦ d′N ′−k)(x)
=N ′∑k=0
(N ′
k
)(−1)N
′−k(uk ◦ (λ′IdE)N′−k)(x)
= (u− λ′IdE)N′(x)
Donc Ker(u− λ′IdE)N′ 6= {0}. Il s’ensuit d’après la remarque
kerupnul2.66 que Ker(u− λ′IdE) 6= {0} et
λ′ ∈ Sp(u). Donc Sp(d′) ⊂ Sp(u). De plus on déduit de ce qui précède que :
Eλ′(d′) ⊂ Cλ′(u)
Notons Sp(d′) = {λ′1, · · · , λ′s}. Comme d′ est diagonalisable :
E =s⊕i=1
Eλ′i(d′) ⊂
s⊕i=1
Cλ′i(u)
Donc E =s⊕i=1
Cλ′i(u). On en déduit que {λ′1, · · · , λ′s} = {λ1, · · · , λr} et Sp(d′) = Sp(u). Donc
pour tout i ∈ {1, · · · , r}, Eλi(d′) = Cλi(u) et pour tout x ∈ E on a :
d′(x) =r∑i=1
d′(pi(x)) =r∑i=1
λipi(x) = d(x)
Donc d = d′ et ν = ν ′.

2.6. APPLICATIONS ET EXEMPLES : SUITES RÉCURRENTES 57
Remarque 2.76 Si u est diagonalisable, sa décomposition de Dunford-Jordan est donc u = u+0(c’est-à-dire d = u et ν = 0).
Exercice de cours 2.34
1. Déterminer la décomposition de Dunford-Jordan des matrices A et C.
2. Déterminer la décomposition de Dunford-Jordan de la matrice
1 2 30 4 50 0 6
. Attention c’est
un piège.
Remarque 2.77
1. Sp(d) = Sp(u).
2. ∀λ ∈ Sp(u) , Eλ(d) = Cλ(u).
3. ∀λ ∈ Sp(u), Cλ(u) est stable par ν et par d.
2.6 Applications et exemples : suites récurrentes
2.6.1 Calcul des puissances d’un endomorphisme
Soit u ∈ L(E) tel que χu soit scindé dans K[X]. Soient λ1, · · · , λr les valeurs propres (dis-tinctes) de u. Alors :
χu(X) = (−1)nr∏i=1
(X − λi)αi , µu(X) =
r∏i=1
(X − λi)βi
On rappelle d’autre part que :
Ker(u− λiIdE)βi−1 Ker(u− λiIdE)βi = Ker(u− λiIdE)αi = Cλi(u)
et que 1 6 βi 6 αi = dim(Cλi(u)).D’après le théorème
Dunford2.75 il existe un unique couple (d, ν) d’endomorphismes de E vérifiant les
propriétés 1,2,3 du théorème. Notons m l’indice de ν. Soit k ∈ N alors comme d et ν commutenton peut appliquer la formule du binôme de Newton ce qui donne :
uk =k∑i=0
(ki
)dk−iνi
Si k > m− 1, alors :
uk =m−1∑i=0
(ki
)dk−iνi

58 CHAPITRE 2. RÉDUCTION DES ENDOMORPHISMES
Maintenant soient des bases B1, · · · ,Br respectivement de chacun des sous-espaces caractéris-tiques Cλ1(u), · · · , Cλr(u). Considérons la base de E définie par B = B1 ∪ · · · ∪ Br. Dans ce cascomme Eλi(u) = Cλi(u) pour tout i ∈ {1, · · · , r} on a :
MatB(d) =
λ1. . .
λ1
O. . . O
λr. . .
λr
et MatB(ν) = MatB(u − d). De plus comme Cλi(u) est stable par ν, en posant A = MatB(u),D = MatB(d) et N = MatB(ν) alors A est une matrice diagonale par blocs et pour k > m − 1on a :
Ak =m−1∑i=0
(ki
)Dk−iN i
On sait calculer les puissances de D. Il reste à calculer N2, · · · , Nm−1.
2.6.2 Une méthode de trigonalisation
On peut cependant faire les choses plus finement. Pour cela pour tout i ∈ {1, · · · , r} comme :
Ker(u− λiIdE) · · · Ker(u− λiIdE)βi−1 Ker(u− λiIdE)βi
On construit des bases Bi,1, · · · ,Bi,βi respectivement de Ker(u−λiIdE), · · · ,Ker(u−λiIdE)βi detelle manière que :
Bi,1 ⊂ · · · ⊂ Bi,βiAutrement dit chaque base Bi,j−1 de Ker(u−λiIdE)j−1 est complétée par une famille libre Lj deKer(u− λiIdE)j pour obtenir une base Bi,j de Ker(u− λiIdE)j . Remarquons alors que si v ∈ Ljalors (u− λiIdE)j−1((u− λiIdE)(v)) = 0. Donc u(v)− λiv ∈ Ker(u− λiIdE)j−1 = Vect(Bi,j−1).Il s’ensuit qu’on a :
MatB(u) =
λ1 ∗ · · · · · · · · · · · · ∗. . . . . .
...
λ1. . .
...
O. . . . . .
...
λr. . .
.... . . ∗
λr
et dans cette base N est une matrice triangulaire supérieure stricte.

2.6. APPLICATIONS ET EXEMPLES : SUITES RÉCURRENTES 59
2.6.3 Suites récurrentes
Intéressons-nous maintenant au cas des suites de nombres complexes définies par une relationde récurrence du type :
un+k = ak−1un+k−1 + ak−2un+k−2 + · · ·+ a0un (2.4) equa:suite-recu
pour tout n > 0. Cette relation de récurrence est équivalente à la relation de récurrence matri-cielle :
Xn+1 = AXn
pour tout n > 0 où Xn =
un+k−1...un
∈ Mk,1(K) et A =
ak−1 ak−2 · · · · · · a0
1 0 · · · · · · 0
0 1. . .
......
. . . . . . . . ....
0 · · · 0 1 0
∈Mk(K). Un calcul facile permet de voir que pour tout n > 0, Xn = AnX0. Calculons le polynômecaractéristique χA. Alors :
χA(λ) =
∣∣∣∣∣∣∣∣∣∣∣∣
ak−1 − λ ak−2 · · · · · · a01 −λ · · · · · · 0
0 1. . .
......
. . . . . . . . ....
0 · · · 0 1 −λ
∣∣∣∣∣∣∣∣∣∣∣∣
=
∣∣∣∣∣∣∣∣∣∣∣∣
−λ 0 · · · · · · 00 −λ · · · · · · 0
0 1. . .
......
. . . . . . . . ....
0 · · · 0 1 −λ
∣∣∣∣∣∣∣∣∣∣∣∣+Dk−1 = (−λ)k +Dk−1
où :
Di =
∣∣∣∣∣∣∣∣∣∣∣∣
ai ai−1 · · · · · · a01 −λ · · · · · · 0
0 1. . .
......
. . . . . . . . ....
0 · · · 0 1 −λ
∣∣∣∣∣∣∣∣∣∣∣∣En développant suivant la première colonne on remarque que Di = (−1)iaiλ
i − Di−1 et parrécurrence on montre que :
Di = (−1)ii∑
j=0
ajλj
et :χA(λ) = (−1)k
(λk − ak−1λk−1 − · · · − a1λ− a0
)

60 CHAPITRE 2. RÉDUCTION DES ENDOMORPHISMES
Si on travaille dans C, χA est scindé.Fin de la séance du 16/11/2018
Supposons d’abord que toutes les racines de χA soient distinctes. Notons λ1, · · · , λk ces
racines. Alors pour tout i ∈ {1, · · · , k}, Vi =
λk−1i
λk−2i...λi1
est un vecteur propre associé à λi car
ak−1λki + · · ·+ a1λi + a0 = λki .
D’après la remarquediagmatendo2.23, on a D = P−1AP où P est la matrice deMk(K) dont les vecteurs
colonne Ci(P ) vérifient Ci(P ) = Vi, et :
D =
λ1 0. . .
0 λk
Donc notant P−1X0 =
c1...ck
Xn = AnX0 = PDnP−1X0 = P
λn1 0
. . .0 λnk
c1...ck
= P
c1λn1
...ckλ
nk
Donc Xn = c1λ
n1V1 + · · ·+ ckλ
nkVk d’où :
Proposition 2.78 Supposons que χA(X) = (−1)k(Xk − ak−1Xk−1 − · · · − a1X − a0
)a k ra-
cines distinctes λi, . . . , λk. Alors, les suites qui vérifient la relation de récurrence (equa:suite-recu2.4) sont les
suites définies parun = c1λ
n1 + · · ·+ ckλ
nk ,
où c1, · · · , ck sont des constantes quelconques.
Remarque 2.79 Les coefficients inconnus c1, · · · , ck sont déterminés par les k premières valeursu0, · · · , uk−1 de la suite.
Le cas où les racines ne sont pas distinctes est plus complexe. Traitons ce cas au travers d’unexemple. Considérons la suite récurrente suivante vérifiant pour tout n > 0 :
un+3 = un+2 + 8un+1 − 12un
La matrice A définie comme ci-dessus vaut :
A =
1 8 −121 0 00 1 0

2.6. APPLICATIONS ET EXEMPLES : SUITES RÉCURRENTES 61
Et d’après ce qui a été fait plus haut :
χA(λ) = −(λ3 − λ2 − 8λ+ 12) = −(λ− 2)2(λ+ 3)
Donc les valeurs propres de A sont 2 et −3 de multiplicités respectives 2 et 1.
D’autre part dim(E2(A)) = 1 et E2(A) = Vect(U) où U =
421
. De plus le système :
(A− 2I3)2
xyz
= 0
est équivalent à x − 4y + 4z = 0 d’où l’on déduit qu’en posant V =
011
, {U, V } est une base
de l’espace C2(A). De plus AV = 2V − U .
Comme E−3(A) = Vect(W ) où W =
−93−1
, (U, V,W ) est une base de R3. Donc si on pose
P =
4 0 −92 1 31 1 −1
on a :
P−1AP =
2 −1 00 2 00 0 −3
= D +N
où D =
2 0 00 2 00 0 −3
et N =
0 −1 00 0 00 0 0
. Comme N est nilpotente d’indice 2, on déduit que
pour n > 1 : un+2
un+1
un
= An
u2u1u0
= PDnP−1
u2u1u0
= P (Dn + nDn−1N)C
où C = P−1
u2u1u0
=
c1c2c3
. Donc :
un+2
un+1
un
=
4 0 −92 1 31 1 −1
2n −n2n−1 00 2n 00 0 (−3)n
c1c2c3
et
un = c12n + c2(−n2n−1 + 2n)− c3(−3)n

62 CHAPITRE 2. RÉDUCTION DES ENDOMORPHISMES
Chapitre 3
Systèmes différentiels linéaires àcoefficients constants
Dans toute la suite le corps K considéré est R ou C.
3.1 Exponentielle d’une matrice ou d’un endomorphisme
3.1.1 Espaces vectoriels normés
La notion d’espace vectoriel normé fait l’objet d’un cours spécifique au S4. Nous nous conten-tons ici d’énoncer les résultats de cette théorie qui nous seront utiles pour résoudre les systèmesdifférentiels.
Définition 3.1 Soit E un K-espace vectoriel. On appelle norme sur E toute application N :E −→ R+ vérifiant :
1. N(x) = 0⇔ x = 0.
2. ∀(λ, x) ∈ K× E ; N(λx) = |λ|N(x).
3. ∀(x, y) ∈ E × E ; N(x+ y) 6 N(x) +N(y).
Un espace vectoriel muni d’une norme est appelé espace vectoriel normé.
Dans la pratique on note pour tout x ∈ E, N(x) = ‖x‖ et (E, ‖ ‖) désigne l’espace vectorielnormé associé.
Exercice de cours 3.1 Soit E = R2. On note, pour (x, y) ∈ E,— ‖(x, y)‖1 = |x|+ |y| ;— ‖(x, y)‖2 =
√x2 + y2 ;
— ‖(x, y)‖∞ = sup(|x|, |y|)Montrer que ‖ ‖1, ‖ ‖2 et ‖ ‖∞ sont des normes. Quelles sont les “cercles unités” pour ces normes,définis par l’équation ‖(x, y)‖i = 1 ?
Voici maintenant quelques résultats importants pour la suite :
63

64 CHAPITRE 3. SYSTÈMES DIFFÉRENTIELS LINÉAIRES
Définition 3.2 On dit qu’une suite (xn)n∈N de E tend vers x ∈ E si ‖xn − x‖ −→ 0 quandn −→∞.
Définition 3.3 Deux normes ‖ ‖1 et ‖ ‖2 sont équivalentes s’il existe α, β > 0 tels que pourtout x ∈ E :
α‖x‖1 6 ‖x‖2 6 β‖x‖1
Les suites convergentes pour ‖ ‖1 ou ‖ ‖2 sont alors les mêmes et ont la même limite.
Théorème 3.4 Si E est de dimension finie alors toutes les normes sont équivalentes.
pro:composantes Proposition 3.5 Si E est de dimension finie muni d’une base (e1, · · · , en) alors toute suite
(xk)k∈N de E telle que xk =
n∑i=1
xk,iei pour tout k ∈ N tend vers x =
n∑i=1
xiei si et seulement si
pour tout i ∈ {1, · · · , n} :xk,i −→ xi quand k −→∞
Preuve: Il suffit de prendre la norme sup, définie par ‖∑n
i=1 xiei‖∞ = supi |xi|, pour obtenirl’équivalence indiquée.
Proposition 3.6 Si (E, ‖ ‖) est un K-espace vectoriel normé de dimension finie alors (E, ‖ ‖)est complet. Autrement dit toute suite de Cauchy dans E est convergente. On rappelle qu’unesuite (xn)n∈N est de Cauchy si :
∀ε > 0 , ∃N ; ∀p, q > N , ‖xp − xq‖ < ε
Preuve: Si on utilise la norme sup ‖ ‖∞, cela résulte de la Propositionpro:composantes3.5.
Définition 3.7 Si (E, ‖ ‖E) et (F, ‖ ‖F ) sont deux espaces vectoriels normés, alors f : E −→ Fest continue en x ∈ E si pour toute suite (xn)n∈N de E telle que lim
n−→∞xn = x pour la norme
‖ ‖E alors limn−→∞
f(xn) = f(x) pour la norme ‖ ‖F . Là encore si E et F sont de dimensionfinie l’ensemble des fonctions continues est le même quel que soit le choix des normes sur E etF .
À partir de maintenant (E, ‖ ‖) est un espace vectoriel normé de dimension finie n.
Donnons un exemple important de norme dans un espace vectoriel de dimension finie : soit
(e1, · · · , en) est une base de E. Pour tout x =
n∑i=1
xiei, posons :
‖x‖1 =n∑i=1
|xi|
Alors ‖ ‖1 est une norme sur E.

3.1. EXPONENTIELLE D’UNE MATRICE OU D’UN ENDOMORPHISME 65
Définition 3.8 Soit∑k>0
uk une série de E. On dit∑k>0
uk converge absolument si la série∑k>0
‖uk‖ converge.
Proposition 3.9 Soit∑k>0
uk une série de E qui converge absolument. Alors∑k>0
uk est conver-
gente.
Preuve: Posons SN =N∑k=0
uk. Alors pour tout p > q :
‖Sp − Sq‖ =
∥∥∥∥∥∥p∑
k=q+1
uk
∥∥∥∥∥∥ 6p∑
k=q+1
‖uk‖
Comme∑k>0
‖uk‖ est une série convergente la suite
(N∑k=0
‖uk‖
)N∈N
est de Cauchy. Alors, pour
tout ε > 0 :
∃N ; ∀p, q > N ,
p∑k=q+1
‖uk‖ < ε
Donc :∀p, q > N , ‖Sp − Sq‖ < ε
Donc (SN )N∈N est de Cauchy dans E qui est complet car de dimension finie. Donc (SN )N∈N estune suite convergente ce qui signifie que
∑k>0
uk converge.
Fin de la séance du 23/11/2018
3.1.2 Norme sur l’espace des endomorphismes et sur les matrices
Dans toute cette partie (E, ‖ ‖) est une espace vectoriel normé de dimension finie n.
Proposition 3.10 Soit u ∈ L(E). Alors il existe une constante M telle que pour tout x ∈ E :
‖u(x)‖ 6M‖x‖
De plus u est continue sur (E, ‖ ‖).
Preuve: Soit (e1, · · · , en) une base de E et x =n∑i=1
xiei alors :
‖u(x)‖ =
∥∥∥∥∥n∑i=1
xiu(ei)
∥∥∥∥∥ 6n∑i=1
|xi|‖u(ei)‖ 6 max16i6n
(‖u(ei)‖)n∑i=1
|xi| = max16i6n
(‖u(ei)‖)‖x‖1

66 CHAPITRE 3. SYSTÈMES DIFFÉRENTIELS LINÉAIRES
Or toutes les normes étant équivalentes il existe un réel β > 0 tel que pour tout x ∈ E, ‖x‖1 6β‖x‖. Donc posant M = β max
16i6n(‖u(ei)‖), on a prouvé que pour tout x ∈ E :
‖u(x)‖ 6M‖x‖
Maintenant si (xk)k∈N est une suite de E qui converge vers x, alors :
‖u(xk)− u(x)‖ = ‖u(xk − x)‖ 6M‖xk − x‖
Comme limk−→∞
‖xk − x‖ = 0, on conclut que limk−→∞
u(xk) = u(x) et u est continue.
Exemple 3.11 Soit fA : Rn → Rn l’application linéaire associée à une matrice A = (ai,j), etsoit la norme ‖ ‖1 sur Rn. On a ‖AX‖1 ≤
(∑i,j |ai,j |
)‖X‖1.
Preuve: En effet, ∑i
∑j |ai,jxj | ≤
∑i,j |ai,jxj |
=∑
i,j |ai,j | |xj |≤
(∑i,j |ai,j |
)(∑
k |xk|)
De la proposition on déduit que supx∈E‖x‖=1
‖u(x)‖ est bien défini.
normalg Proposition 3.12 Pour tout u ∈ L(E) définissons :
‖|u‖| := supx∈E‖x‖=1
‖u(x)‖
Alors ‖| ‖| est une norme sur E qui satisfait :1. ∀x ∈ E , ‖u(x)‖ 6 ‖|u‖|‖x‖.2. ∀(u, v) ∈ (L(E))2 , ‖|u ◦ v‖| 6 ‖|u‖|‖|v‖|.
‖| ‖| s’appelle norme d’algèbre.
Preuve: En effet, on déduit de la définition de ‖|u‖| que ‖u(x)‖ ≤ ‖|u‖| ‖x‖ pour tout x ∈ E.Soit maintenant x ∈ E, on a
‖u ◦ v(x)‖ ≤ ‖|u‖| ‖v(x)‖ ≤ ‖|u‖| ‖|v‖| ‖x‖ ,
en appliquant deux fois cette propriété.
Proposition 3.13 On considère l’espace vectoriel des matrices colonnes E = Mn,1(K) munid’une norme ‖ ‖. Soit A ∈Mn(K) et définissons :
‖|A‖| := supX∈E‖X‖=1
‖AX‖
Alors ‖| ‖| est une norme sur E qui satisfait :

3.1. EXPONENTIELLE D’UNE MATRICE OU D’UN ENDOMORPHISME 67
1. ∀X ∈ E , ‖AX‖ 6 ‖|A‖|‖X‖.2. ∀(A,B) ∈ (Mn(K))2 , ‖|AB‖| 6 ‖|A‖|‖|B‖|.
‖| ‖| s’appelle norme matricielle.
Preuve: Pour tout A ∈Mn(K), considérons l’application :
fA : E −→ EX 7−→ AX
Alors fA est un endomorphisme de E et ‖|A‖| = ‖|fA‖|. L’assertion 1. est évidente. Pour l’as-sertion 2. on a :
‖|AB‖| = ‖|fAB‖| = ‖|fA ◦ fB‖| 6 ‖|fA‖|‖|fB‖| = ‖|A‖|‖|B‖|
3.1.3 Dérivabilité et intégration des fonctions à variable réelle et à valeursdans un espace vectoriel
Dans toute cette partie (E, ‖ ‖) est une espace vectoriel normé de dimension finie n.
Définition 3.14 Soit I un intervalle non vide de R. On dit que la fonction f : I −→ E estdérivable en t0 ∈ I, s’il existe un vecteur de E noté f ′(t0) tel que :∥∥∥∥1
h(f(t0 + h)− f(t0))− f ′(t0)
∥∥∥∥ −→ 0
quand h −→ 0.Si f est dérivable sur I, l’application :
f ′ : I −→ Et 7−→ f ′(t)
s’appelle la dérivée de f sur I.
Proposition 3.15 Soit I un intervalle non vide de R. On suppose que E est muni d’une baseB. Soit f : I −→ E une fonction. Notons (f1, · · · , fn) les fonctions composantes de f dans la
base B (i.e. ∀t ∈ I , f(t) =n∑i=1
fi(t)ei). Alors f est dérivable en t0 ∈ I si et seulement si les
fonctions fi sont dérivables en t0 ∈ I pour tout i ∈ {1, · · · , n}.
Proposition 3.16 Soit I un intervalle non vide de R et soit f : I −→ E une fonction.
1. Soient B et B′ deux bases de E. Alors les fonctions composantes de f dans B sont inté-grables au sens de Riemann sur I si et seulement si les fonctions composantes de f dansB′ sont intégrables au sens de Riemann sur I. Si les fonctions composantes de f dans unebase sont intégrables, on dira alors que f est intégrable.

68 CHAPITRE 3. SYSTÈMES DIFFÉRENTIELS LINÉAIRES
2. Soit B = (e1, · · · , en) une base de E et (f1, · · · , fn) les composantes de f dans B. Alorsla quantité :
n∑i=1
∫I
(fi(t)dt) ei
ne dépend pas de la base choisie et est notée∫If(t)dt.
Préparer la preuve de cette proposition : bien écrire le changement de base.Désormais l’espace E = Mn,1(K) est muni d’une norme et Mn(K) est muni de la norme
matricielle associée.
Proposition 3.17 Soient :
A : I −→ Mn(K)t 7−→ A(t)
,B : I −→ Mn(K)
t 7−→ B(t)
etX : I −→ Mn,1(K)
t 7−→ X(t)
trois fonctions dérivables sur I. Alors les fonctions :
AB : I −→ Mn(K)t 7−→ A(t)B(t)
,AX : I −→ Mn,1(K)
t 7−→ A(t)X(t)
sont dérivables et :
(AB)′(t) = A′(t)B(t) +A(t)B′(t) et (AX)′(t) = A′(t)X(t) +A(t)X ′(t)
Preuve: Soit t, h ∈ R tels que [t− h, t+ h] ⊂ I. Comme A et B sont dérivables en t, on a
A(t+ h) = A(t) + hA′(t) + o(h)B(t+ h) = B(t) + hB′(t) + o(h)
On en déduit que A(t+ h)B(t+ h) = A(t)B(t) + h(A(t)B′(t) +A′(t)B(t)) + o(h). Ainsi, AB estdérivable en t et (AB)′(t) = A(t)B′(t) +A′(t)B(t).
3.1.4 Exponentielle d’une matrice
Proposition et définition 3.18 Pour tout A ∈Mn(K), la série∑k>0
1
k!Ak est convergente. Sa
somme notée eA ou exp(A) s’appelle l’exponentielle de A. De plus :
‖|eA‖| 6 e‖|A‖|

3.1. EXPONENTIELLE D’UNE MATRICE OU D’UN ENDOMORPHISME 69
Preuve:∥∥∥∥∣∣∣∣ 1
k!Ak∥∥∥∥∣∣∣∣ 6
1
k!‖|Ak‖| 6 1
k!‖|A‖|k. Or la série
∑k>0
1
k!‖|A‖|k est convergente donc
∑k>0
1
k!Ak est convergente. Posons sk =
k∑i=0
1
i!Ai. Comme :
∥∥∥∥∥∣∣∣∣∣k∑i=0
1
i!Ai
∥∥∥∥∥∣∣∣∣∣ 6
k∑i=0
∥∥∥∥∣∣∣∣ 1i!Ai∥∥∥∥∣∣∣∣ 6 k∑
i=0
1
i!‖|A‖|i 6 e‖|A‖|,
on a ‖|sk‖| ≤ e‖|A‖| pour tout k. Soit ε > 0 et soit k0 tel que ‖|eA−sk‖| ≤ ε pour tout k ≥ k0 : onen déduit que ‖|eA‖| ≤ ‖|sk + (eA− sk)‖| ≤ ‖|sk‖|+ ‖|eA− sk‖| ≤ eA + ε. Comme cette inégalitéest vraie pour tout ε, on a ‖|eA‖| 6 e‖|A‖|.Fin de la séance du 30/11/2018
Proposition 3.19 1. Soit A ∈Mn(K) et P ∈ GLn(K). Alors :
eP−1AP = P−1eAP
2. Soit (A,B) ∈Mn(K)2. Si AB = BA alors :
eAeB = eA+B = eBeA
etBeA = eAB
3. Soit A ∈Mn(K), alors eA est toujours inversible et :
(eA)−1 = e−A
Preuve:
1. Soit A ∈Mn(K) et P ∈ GLn(K). Alors :
P−1
(k∑i=0
1
i!Ai
)P =
k∑i=0
1
i!P−1AiP =
k∑i=0
1
i!(P−1AP )i
Or l’application X 7−→ P−1XP est un endomorphisme de Mn(K) qui est de dimensionfinie, donc elle est continue et :
P−1eAP = P−1
( ∞∑k=0
1
k!Ak
)P = lim
n−→∞P−1
(n∑k=0
1
k!Ak
)P = eP
−1AP
2. Pour montrer le point 2. nous avons besoin du lemme suivant :
Lemme 3.20 Soient A =∑k>0
Ak et B =∑k>0
Bk deux séries absolument convergentes de
Mn(K). Alors la série C =∑k>0
(k∑l=0
AkBk−l
)est absolument convergente et C = AB.

70 CHAPITRE 3. SYSTÈMES DIFFÉRENTIELS LINÉAIRES
Ce lemme est conséquence de la remarque suivante :
∑Nk=0
(∑kl=0 ‖|AkBk−l‖|
)≤
∑Ni=0
∑Nj=0 ‖|Ai‖| ‖|Bj‖|
≤(∑N
i=0 ‖|Ai‖|) (∑N
j=0 ‖|Bj‖|)
≤ (∑∞
i=0 ‖|Ai‖|)(∑∞
j=0 ‖|Bj‖|),
de sorte que cette somme est effectivement absolument convergente.Notons a =
∑k>0 ‖|Ak‖| et b =
∑k>0 ‖|Bk‖|. Pour montrer que C = AB, on fixe ε > 0
et on montre que ‖|C−AB‖| ≤ 2ε+ aε+ bε+ ε2. Soit N tel que ∀n ≥ N,∑
k>n ‖|Ak‖| <ε ,∑
k>n ‖|Bk‖| < ε, et∑
k>n
(∑kl=0 ‖|AkBk−l‖|
)< ε. On a : ‖|C−
∑nk=0
∑kl=0AkBk−l‖| ≤∑
k>n
(∑kl=0 ‖|AkBk−l‖|
)< ε. Par ailleurs, ‖|
∑nk=0
∑kl=0AkBk−l−
∑nk=0
∑nl=0AkBl‖| <
ε, d’où ‖|C−∑n
k=0
∑nl=0AkBl‖| < 2ε. Ecrivons maintenant A = A′+A′′ et B = B′+B′′
avec A′ =∑n
k=0Ak et B′ =∑n
k=0Bk : on a ‖|AB − A′B′‖| ≤ ‖|A′B′′‖| + ‖|A′′B′‖| +‖|B′B′′‖| ≤ aε+ bε+ ε2. On obtient donc que ‖|C −AB‖| ≤ 2ε+ aε+ bε+ ε2.
Montrons maintenant le point 2. Comme A et B commutent on peut appliquer la formuledu binôme de Newton :
1
k!(A+B)k =
1
k!
k∑i=0
(ki
)AiBk−i
=1
k!
k∑i=0
k!
i!(k − i)!AiBk−i
=k∑i=0
(1
i!Ai)(
1
(k − i)!Bk−i
)
Comme∑k>0
1
k!Ak et
∑k>0
1
k!Bk sont absolument convergentes, d’après le lemme la série
∑k>0
1
k!(A+B)k est absolument convergente et :
∞∑k=0
1
k!(A+B)k =
∞∑k=0
k∑i=0
(1
i!Ai)(
1
(k − i)!Bk−i
)=
( ∞∑k=0
1
k!Ak
)( ∞∑k=0
1
k!Bk
)
d’où le résultat.
deriv Proposition 3.21 Soit A ∈Mn(K). Alors l’application R −→Mn(K) , t 7−→ etA est de classeC∞ et (etA)′ = AetA.

3.1. EXPONENTIELLE D’UNE MATRICE OU D’UN ENDOMORPHISME 71
Preuve: Montrons d’abord que t 7−→ etA est dérivable :∥∥∥∥∣∣∣∣1h(e(t+h)A − etA)−AetA∣∣∣∣∥∥∥∥ =
∥∥∥∥∣∣∣∣etA(1
h(ehA − I)−A
)∣∣∣∣∥∥∥∥=
∥∥∥∥∥∣∣∣∣∣etA
( ∞∑k=2
hk−1
k!Ak
)∣∣∣∣∣∥∥∥∥∥
= |h|
∥∥∥∥∥∣∣∣∣∣etA
( ∞∑k=2
hk−2
k!Ak
)∣∣∣∣∣∥∥∥∥∥
Supposons |h| 6 1. Donc :∥∥∥∥∣∣∣∣1h(e(t+h)A − etA)−AetA∣∣∣∣∥∥∥∥ 6 |h|‖|etA|‖
∞∑k=2
1
k!‖|A|‖k
6 |h|‖|etA|‖e‖|A|‖ −→ 0
quand h −→ 0. Ceci montre que t 7→ etA est dérivable de dérivée t 7→ AetA.
expodiag Proposition 3.22 Soit D =
λ1 0 · · · 0
0. . . . . .
......
. . . . . . 00 · · · 0 λn
une matrice diagonale. Alors :
eD =
eλ1 0 · · · 0
0. . . . . .
......
. . . . . . 00 · · · 0 eλn
En particulier pour tout λ ∈ K, on a eλIn = eλIn.
Preuve: eD = limN−→+∞
(N∑k=0
1
k!Dk
). Or :
N∑k=0
1
k!Dk =
N∑k=0
1
k!
λk1 0 · · · 0
0. . . . . .
......
. . . . . . 00 · · · 0 λkn
=
N∑k=0
1
k!λk1 0 · · · 0
0. . . . . .
......
. . . . . . 0
0 · · · 0
N∑k=0
1
k!λkn

72 CHAPITRE 3. SYSTÈMES DIFFÉRENTIELS LINÉAIRES
NotonsN∑k=0
1
k!Dk = (xNij )16i,j6n et eD = (xij)16i,j6n. Pour tout i, j ∈ {1, · · · , n}, notons Eij la
matrice dont tous les coefficients sont nuls sauf celui de la ligne i et de la colonne j qui est égalà 1.
Les coefficients deN∑k=0
1
k!Dk et eD ne sont rien d’autre que les coordonnées respectivement
deN∑k=0
1
k!Dk et de eD dans la base {Eij}16i,j6n. Comme lim
N−→+∞
(N∑k=0
1
k!Dk
)= eD, xNij −→ xij
ce qui prouve que :
eD =
+∞∑k=0
1
k!λk1 0 · · · 0
0. . . . . .
......
. . . . . . 0
0 · · · 0
+∞∑k=0
1
k!λkn
=
eλ1 0 · · · 0
0. . . . . .
......
. . . . . . 00 · · · 0 eλn
3.2 Calcul pratique de l’exponentielle d’une matrice
De manière générale si A ∈Mn(K) et si son polynôme caractéristique est scindé, alors d’aprèsla décomposition de Dunford, il existe une matrice D diagonalisable et une matrice N nilpotentetelles que :
1. A = D +N .2. DN = ND.
Donc comme D et N commutent :
eA = eD+N = eDeN
Comme D est diagonalisable il existe P ∈ GLn(K) telle que :
P−1DP =
µ1 0 · · · 0
0. . . . . .
......
. . . . . . 00 · · · 0 µn
D’autre part N est nilpotente donc il existe un entier p 6 n tel que Np = 0. Donc :
eA = P
eµ1 0 · · · 0
0. . . . . .
......
. . . . . . 00 · · · 0 eµn
P−1(In +N +
1
2!N2 + · · ·+ 1
(p− 1)!Np−1
)

3.2. CALCUL PRATIQUE DE L’EXPONENTIELLE D’UNE MATRICE 73
En fait on n’a pas besoin de calculer D et N . En effet soient λ1, · · · , λr les valeurs propresde A et pour tout i ∈ {1, · · · , r}, Cλi = Ker(A − λiIn)αi les sous-espaces caractéristiques deA. Pour tout i ∈ {1, · · · , r} on construit une base Bi de chacun des sous-espaces Cλi . Comme
Mn,1(K) =r⊕i=1
Cλi , B =r⋃i=1
Bi est une base de Mn,1(K). Soit P la matrice de B. Comme les
sous-espaces caractéristiques sont stables on a :
A′ = P−1AP =
A1 O. . .
O Ar
où les matrices Ai ∈Mαi(K). Dans cette base D est diagonale, c’est-à-dire que
P−1DP =
λ1Iα1 O. . .
O λrIαr
Posons N ′ = P−1NP alors :
N ′ = P−1NP = P−1(A−D)P = A′ −
λ1Iα1 O. . .
O λrIαr
et :
eA = P
eλ1Iα1 0 · · · 0
0. . . . . .
......
. . . . . . 00 · · · 0 eλrIαr
(In +N ′ +
1
2!N ′2 + · · ·+ 1
(p− 1)!N ′p−1
)P−1
On peut encore raffiner les choses. De manière similaire à la preuve de la propositionexpodiag3.22 on
peut montrer que :
eA = ePA′P−1
= PeA′P−1 = P
eA1 O
. . .O eAr
P−1
Calculons eAi pour tout i ∈ {1, · · · , r}. Alors :
eAi = e(Ai−λiIαi )+λiIαi = eλie(Ai−λiIαi )
Or :
N ′ = A′ −
λ1Iα1 O. . .
O λrIαr
=
A1 − λ1Iα1 O. . .
O Ar − λrIαr

74 CHAPITRE 3. SYSTÈMES DIFFÉRENTIELS LINÉAIRES
On a donc pour tout i ∈ {1, · · · , r}, (Ai − λiIαi)p = 0 et même (Ai − λiIαi)βi = 0 où βi estl’indice de Ai − λiIαi :
eAi = eλi(Iαi +N ′i +
1
2!N ′2i + · · ·+ 1
(βi − 1)!N ′βi−1i
)où N ′i = Ai − λiIαi .
Remarque 3.23 On a vu dans la propositionnormalg3.12 que l’on pouvait munir L(E) de la norme
d’algèbre ‖| ‖|. De la même manière que pour les matrices on peut définir l’exponentielle d’unendomorphisme et tous les énoncés précédents sont transposables dans le cadre des endomor-phismes.
3.3 Systèmes différentiels linéaires à coefficients constants
K = R ou C et I désigne un intervalle non vide de R. À partir de maintenant on identifieMn,1(K) et Kn.
Définition 3.24 Soit n ∈ N?. Pour tout i ∈ {1, · · · , n}, soit bi : I −→ K une fonction continueet pour tout (i, j) ∈ {1, · · · , n}2 soit aij ∈ K.
1. Le système :
(SL)
y′1 = a11y1+ · · · +a1nyn + b1...
......
y′n = an1y1+ · · · +annyn + bn
s’appelle système différentiel linéaire d’ordre 1 à coefficients constants.2. Le système :
(SH)
y′1 = a11y1+ · · · +a1nyn...
......
y′n = an1y1+ · · · +annyn
s’appelle système différentiel linéaire homogène associé à (SL).
Résoudre (SL) ou (SH) revient à trouver un intervalle non vide J ⊂ I et des fonctions y1, · · · , yn
dérivables sur J et vérifiant le système considéré. Si on note A = (aij)16i,j6n, Y =
y1...yn
et
B =
b1...bn
alors :
(SL)⇐⇒ (L) Y ′ = AY +B
et(SH)⇐⇒ (H) Y ′ = AY
Résoudre (L) ou (H) revient à trouver un intervalle non vide J ⊂ I et une fonction Y : J −→ Kndérivable sur J et vérifiant respectivement (L) ou (H).Fin de la séance du 07/12/2018

3.3. SYSTÈMES DIFFÉRENTIELS LINÉAIRES À COEFFICIENTS CONSTANTS 75
3.3.1 Système différentiel linéaire homogène
Notons C(I,Kn) l’espace vectoriel des fonctions continues de I dans Kn.
Théorème 3.25 L’ensemble SH des solutions sur R de H : Y ′ = AY est un sous-espace vectorielde C(R,Kn) de dimension n formé de fonctions de classe C∞.
Plus précisément :SH := {t 7−→ etAC où C ∈ Kn}
De plus pour tout (t0, Y0) ∈ R×Kn il existe une unique solution Y de H telle que Y (t0) = Y0.
Preuve: Il est immédiat que la fonction nulle appartient à SH et que si (Y1, Y2) ∈ S2H alors
pour tout (λ1, λ2) ∈ K2 :λ1Y1 + λ2Y2 ∈ SH
Donc SH est un sous-espace vectoriel de C(R,Kn).Maintenant soit Y ∈ SH et soit Z(t) = e−tAY (t). Alors :
Z ′(t) = −Ae−tAY (t) + e−tAY ′(t) = −Ae−tAY (t) + e−tAAY (t)
Or A et e−tA commutent donc Z ′(t) = 0 pour tout t ∈ R. Donc il existe C ∈ Kn tel que Z(t) = Cpour tout t ∈ R et Y (t) = etAC.
Réciproquement on vérifie facilement que pour tout C ∈ Kn, la fonction t 7→ Y (t) = etACest solution de SH.
D’autre part soit (t0, Y0) ∈ R×Kn. Alors :
Y (t0) = Y0 ⇐⇒ et0AC = Y0 ⇐⇒ C = e−t0AY0
CalculSol Théorème 3.26 Soit A ∈Mn(K) telle que χA est scindé. Notons µ1, · · · , µn les valeurs propresde A comptées avec multiplicité et soit (U1, · · · , Un) une base de Kn constituée de vecteurs ap-partenant aux sous-espaces caractéristiques. Plus précisément on suppose que :
∀i ∈ {1, · · · , n} , Ui ∈ Cµi(A)
Alors :
SH =
t 7−→n∑i=1
cieµit
(βi−1∑k=0
tk
k!(A− µiIn)kUi
)où
c1...cn
∈ Kn
où βi est la multiplicité de µi dans µA.En particulier si A est diagonalisable alors :
SH =
t 7−→n∑i=1
cieµitUi où
c1...cn
∈ Kn
Et dans ce cas (U1, · · · , Un) est une base de Kn constituée de vecteurs propres de A.

76 CHAPITRE 3. SYSTÈMES DIFFÉRENTIELS LINÉAIRES
Preuve: Le polynôme caractéristique χA étant scindé on a :
χA(λ) = (−1)nr∏i=1
(λi − λ)αi
et comme Kn =r⊕i=1
Cλi(A), on choisit une base B = (U1, · · · , Un) de E telle que B =r⋃i=1
Bi où
pour tout i ∈ {1, · · · , r}, Bi est une base de Cλi(A).Y est une solution de H : Y ′ = AY sur R si et seulement si Y (t) = etAC où C ∈ Kn. Notons
(c1, · · · , cn) les coordonnées de C dans la base B. Alors C =n∑i=1
ciUi. Pour tout i ∈ {1, · · · , n},
Ui ∈ Cµi(A) où µ1, · · · , µn sont les valeurs propres de A comptées avec multiplicité. Donc :
Y (t) =
n∑i=1
cietAUi =
n∑i=1
cieµitIn+t(A−µiIn)Ui
=n∑i=1
cieµitInet(A−µiIn)Ui =
n∑i=1
cieµitet(A−µiIn)Ui
D’autre part on a vu que si γi désigne la multiplicité de µi dans le polynôme minimal de A,alors :
Ker(A− µiIn)γi−1 Ker(A− µiIn)γi = Cµi(A)
De plus comme Ui ∈ Cµi(A), pour tout k > γi, (A− µiIn)kUi = 0 et il s’ensuit que :
Y (t) =
n∑i=1
cieµit
(γi−1∑k=0
tk
k!(A− µiIn)kUi
)
Remarque 3.27 1. Les formules du théorème donnent un calcul implicite de etA. En effet,en vertu de la formule de changement de coordonnées, et comme Y (0) = C =
∑ciUi,
on a
c1...cn
= P−1C où P est la matrice de passage de la base canonique de Kn à B.
Autrement dit les colonnes de P sont U1, · · · , Un et
Y (t) = etAP
c1...cn
ce qui permet de déduire que les colonnes de etAP sont respectivement :
eµ1t
(γ1−1∑k=0
tk
k!(A− µ1In)kU1
), · · · , eµnt
(γn−1∑k=0
tk
k!(A− µnIn)kUn
)

3.3. SYSTÈMES DIFFÉRENTIELS LINÉAIRES À COEFFICIENTS CONSTANTS 77
2. On peut remarquer d’autre part que si N est la matrice nilpotente de la décomposition deJordan de A, alors en utilisant la forme de N apparaissant dans la preuve du théorèmeDunford2.75 du chapitre 2 on a pour tout i ∈ {1, · · · , n} :
etNUi =
(γi−1∑k=0
tk
k!(A− µiIn)kUi
)
3.3.2 Système différentiel linéaire non homogène
Soient I un intervalle de R, B : I −→ Kn une fonction continue et A ∈Mn(K).
Théorème 3.28 On suppose que l’ensemble SL des solutions de L : Y ′ = AY +B est non vide.Soit ϕ0 ∈ SL. Alors :
SL := {I −→ Kn, t 7−→ etAC + ϕ0(t) où C ∈ Kn}
Preuve: Soit Y une solution de L sur I. Alors :
(Y − ϕ0)′(t) = Y ′(t)− ϕ′0(t) = (AY (t) +B(t))− (Aϕ0(t) +B(t)) = A(Y (t)− ϕ0(t))
Donc Y − ϕ0 est solution de l’équation homogène H : Y ′ = AY . Donc Y (t) = etAC + ϕ0(t) oùC ∈ Kn.
Réciproquement, on vérifie facilement que toutes les fonctions de la forme Y (t) = etAC+ϕ0(t)pour tout t ∈ I sont solutions.
Théorème 3.29 (Méthode de la variation de la constante) L’ensemble SL est non vide.Plus précisément pour tout t0 ∈ I :
ϕ0 : I −→ Kn
t 7−→ ϕ0(t) :=
∫ t
t0
e(t−x)AB(x)dx
est une solution de L.
Preuve: Soit pour tout t ∈ I, la fonction ϕ0(t) :=
∫ t
t0
e(t−x)AB(x)dx. Montrons que ϕ0 est
solution de L.Remarquons d’abord que puisque tA et −xA commutent alors e(t−x)A = etAe−xA et ϕ0(t) =
etA∫ t
t0
e−xAB(x)dx. De plus :
ϕ′0(t) = AetA∫ t
t0
e−xAB(x)dx+ etAe−tAB(t) = Aϕ0(t) +B(t)
D’où le résultat.

78 CHAPITRE 3. SYSTÈMES DIFFÉRENTIELS LINÉAIRES
Remarque 3.30 — Les solutions de H : Y ′ = AY s’écrivent Y (t) = etAC avec C ∈ Kn. Sil’on cherche une fonction dérivable C : I −→ Kn telle que ϕ0(t) = etAC(t) soit solutionde L on a :
0 = ϕ′0(t)− (Aϕ0(t) +B(t)) = AetAC(t) + etAC ′(t)− (AetAC(t) +B(t))= etAC ′(t) +B(t).
Donc C ′(t) = e−tAB(t) et on retrouve l’expression donnée dans le théorème. Cette façonde trouver une solution de L explique l’expression de "Méthode de la variation de laconstante".
— Pour résoudre L il suffit tout simplement de trouver une solution particulière ϕ0 de L ettoutes les autres solutions s’écrivent comme la somme de ϕ0 et d’une solution de H.
3.4 Équations différentielles linéaires à coefficients constants
K = R ou C et I désigne un intervalle non vide de R.
Définition 3.31 Soient n > 1, (a0, · · · , an−1) ∈ Kn et b : I −→ K continue.1. L’équation :
(L) y(n) + an−1y(n−1) + · · ·+ a1y
′ + a0y = b
s’appelle équation différentielle linéaire à coefficients constants.2. L’équation :
(H) y(n) + an−1y(n−1) + · · ·+ a1y
′ + a0y = 0
s’appelle équation différentielle linéaire homogène associée à L.
Résoudre (L) ou (H) revient à trouver un intervalle non vide J ⊂ I et une fonction y dérivablesur J vérifiant (L) ou (H).
Définition 3.32 Soient n > 1, (a0, · · · , an−1) ∈ Kn et b : I −→ K continue. On appelle équa-tion caractéristique de l’équation différentielle :
(L) y(n) + an−1y(n−1) + · · ·+ a1y
′ + a0y = b
l’équation :xn + an−1x
n−1 + · · ·+ a1x+ a0 = 0
Théorème 3.33 On suppose que K = C. Soient n > 1, (a0, · · · , an−1) ∈ Kn. Considéronsl’équation homogène :
(H) y(n) + an−1y(n−1) + · · ·+ a1y
′ + a0y = 0
Supposons que les racines de l’équation caractéristique soient λ1, · · · , λr de multiplicité respectivesα1, · · · , αr. Alors l’ensemble des solutions SH définies sur R de (H) est un sous-espace vectorielde C(R,C). Plus précisément :
SH := {y ∈ C∞(R,C) ; ∃(P1, · · · , Pr) ∈ Cα1−1[X]× · · · × Cαr−1[X] ; y(t) =
r∑i=1
eλitPi(t)}

3.4. ÉQUATIONS DIFFÉRENTIELLES LINÉAIRES 79
Preuve: Posons Y =
y(n−1)
...y′
y
. Alors :
Y ′ =
−an−1 −an−2 · · · · · · −a0
1 0 · · · · · · 0
0 1. . .
......
. . . . . . . . ....
0 · · · 0 1 0
Y
Notons A la matrice du système différentiel obtenu. Les solutions de ce système sont de la forme :
Y (t) = etAC
où C ∈ Cn. Calculons le polynôme caractéristique de A. Alors :
χA(λ) = (−1)n(λn + an−1λ
n−1 + · · ·+ a1λ+ a0)
et les racines de χA sont exactement les racines de l’équation caractéristique. Donc
χA(X) = (−1)nr∏i=1
(X − λi)αi
Comme Cn =r⊕i=1
Cλi(A), il existe (U1, · · · , Ur) ∈r∏i=1
Cλi(A) tel que C =r∑i=1
Ui. Donc par un
raisonnement similaire à la preuve du théorèmeCalculSol3.26 :
Y (t) =
r∑i=1
etAUi =
r∑i=1
eλitIn+t(A−λiIn)Ui =r∑i=1
eλitet(A−λiIn)Ui =r∑i=1
eλitαi−1∑k=0
tk
k!(A− λiIn)kUi
Il s’ensuit que la dernière coordonnée de Y (t) qui n’est rien d’autre que y(t) vérifie :
y(t) =
r∑i=1
eλitαi−1∑k=0
αkitk =
r∑i=1
eλitPi(t)
où Pi est un polynôme de degré au plus αi − 1.Réciproquement, l’espace des solutions SH est donc inclus dans l’espace S ′ des éléments de
la forme y(t) =∑r
i=1 eλitPi(t) avec chaque Pi de degré au plus αi − 1. Comme S ′ a comme
famille génératrice les éléments eλittm avec 0 ≤ m ≤ αi − 1, qui sont en nombre∑αi = n, on a
dimS ′ ≤ n.Par ailleurs le K-espace vectoriel des y(t) vérifiant (H) et le K-espace vectoriel des Y (t)
vérifiant Y ′ = AY sont isomorphes. En effet, à y on peut associer le vecteur Y = (y(n−1), . . . , y′, y)

80 CHAPITRE 3. SYSTÈMES DIFFÉRENTIELS LINÉAIRES
et à Y = (y1, . . . , yn) on peut associer yn : ce sont des isomorphismes inverses l’un de l’autre. Onen déduit que dimSH = n. Comme SH ⊂ S ′, on obtient S = S ′.
Deuxième preuve de la réciproque, plus explicite :
Réciproquement il faut vérifier que si y(t) =
r∑i=1
eλitPi(t) où Pi est un polynôme de degré au
plus αi − 1 alors y est solution de (H). Considérons l’endomorphisme suivant :
p : E −→ Ey 7−→ p(y) = y′
où E = C∞(R,C). Alors si y ∈ SH, on a :
y(n)+an−1y(n−1)+· · ·+a1y′+a0y = (pn+an−1p
(n−1)+· · ·+a1p′+a0p)(y) =r∏i=0
(p−λiIdE)αi(y) = 0
On va alors montrer le lemme suivant :
Lemme 3.34 Soit λ ∈ C et α > 1 un entier. Alors :
(p− λIdE )α(tα−1eλt) = 0
Preuve: On a :
(p− λIdE )(tα−1eλt) = p(tα−1eλt)− λtα−1eλt
= (α− 1)tα−2eλt + λtα−1eλt − λtα−1eλt
= (α− 1)tα−2eλt
Soit j ∈ {1, . . . , α− 1}. Pour j = 1, on vient de montrer que :
(p− λIdE )j(tα−1eλt) = (α− 1)tα−1−jeλt
Pour j > 2, supposons que :
(p− λIdE )j(tα−1eλt) = (α− 1)(α− 2) . . . (α− j)tα−1−jeλt
et montrons que cette relation reste vraie au rang j + 1.
(p− λIdE )j+1(tα−1eλt) = (p− λIdE )((α− 1)(α− 2) . . . (α− j)tα−1−jeλt)= (α− 1)(α− 2) . . . (α− j)(p(tα−1−jeλt)− λtα−1−jeλt)= (α− 1)(α− 2) . . . (α− j)(α− 1− j)tα−1−(j+1)eλt
La relation est donc vraie au rang j + 1 et on conclut qu’elle est vraie pour tout j ∈ {1, . . . , α}.En prenant j = α, on obtient la relation désirée.
De ce lemme on déduit immédiatement que pour tout Pi ∈ Cαi−1[X], la fonction t 7−→eλitPi(t) ∈ SH.