Embed Size (px)
DESCRIPTION
iugyjhbjh
Citation preview
ASSERVISSEMENTS DES SYSTEMES LINEAIRES INVARIANTS DANS LE TEMPS (S.L.I.T) EN TEMPS CONTINU – cours – J.BOONAERT 2006
129
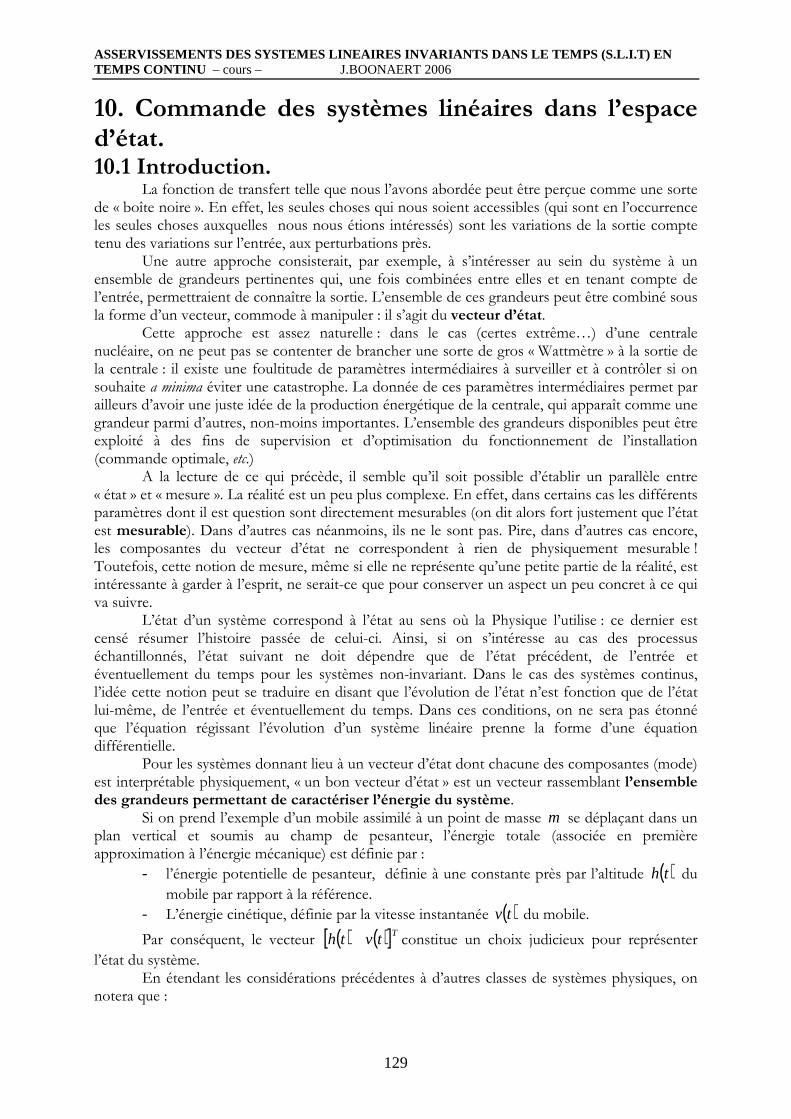
10. Commande des systèmes linéaires dans l’espace d’état. 10.1 Introduction. La fonction de transfert telle que nous l’avons abordée peut être perçue comme une sorte de « boîte noire ». En effet, les seules choses qui nous soient accessibles (qui sont en l’occurrence les seules choses auxquelles nous nous étions intéressés) sont les variations de la sortie compte tenu des variations sur l’entrée, aux perturbations près. Une autre approche consisterait, par exemple, à s’intéresser au sein du système à un ensemble de grandeurs pertinentes qui, une fois combinées entre elles et en tenant compte de l’entrée, permettraient de connaître la sortie. L’ensemble de ces grandeurs peut être combiné sous la forme d’un vecteur, commode à manipuler : il s’agit du vecteur d’état. Cette approche est assez naturelle : dans le cas (certes extrême…) d’une centrale nucléaire, on ne peut pas se contenter de brancher une sorte de gros « Wattmètre » à la sortie de la centrale : il existe une foultitude de paramètres intermédiaires à surveiller et à contrôler si on souhaite a minima éviter une catastrophe. La donnée de ces paramètres intermédiaires permet par ailleurs d’avoir une juste idée de la production énergétique de la centrale, qui apparaît comme une grandeur parmi d’autres, non-moins importantes. L’ensemble des grandeurs disponibles peut être exploité à des fins de supervision et d’optimisation du fonctionnement de l’installation (commande optimale, etc.) A la lecture de ce qui précède, il semble qu’il soit possible d’établir un parallèle entre « état » et « mesure ». La réalité est un peu plus complexe. En effet, dans certains cas les différents paramètres dont il est question sont directement mesurables (on dit alors fort justement que l’état est mesurable). Dans d’autres cas néanmoins, ils ne le sont pas. Pire, dans d’autres cas encore, les composantes du vecteur d’état ne correspondent à rien de physiquement mesurable ! Toutefois, cette notion de mesure, même si elle ne représente qu’une petite partie de la réalité, est intéressante à garder à l’esprit, ne serait-ce que pour conserver un aspect un peu concret à ce qui va suivre. L’état d’un système correspond à l’état au sens où la Physique l’utilise : ce dernier est censé résumer l’histoire passée de celui-ci. Ainsi, si on s’intéresse au cas des processus échantillonnés, l’état suivant ne doit dépendre que de l’état précédent, de l’entrée et éventuellement du temps pour les systèmes non-invariant. Dans le cas des systèmes continus, l’idée cette notion peut se traduire en disant que l’évolution de l’état n’est fonction que de l’état lui-même, de l’entrée et éventuellement du temps. Dans ces conditions, on ne sera pas étonné que l’équation régissant l’évolution d’un système linéaire prenne la forme d’une équation différentielle. Pour les systèmes donnant lieu à un vecteur d’état dont chacune des composantes (mode) est interprétable physiquement, « un bon vecteur d’état » est un vecteur rassemblant l’ensemble des grandeurs permettant de caractériser l’énergie du système. Si on prend l’exemple d’un mobile assimilé à un point de masse m se déplaçant dans un plan vertical et soumis au champ de pesanteur, l’énergie totale (associée en première approximation à l’énergie mécanique) est définie par :
- l’énergie potentielle de pesanteur, définie à une constante près par l’altitude ( )th du
mobile par rapport à la référence.
- L’énergie cinétique, définie par la vitesse instantanée ( )tv du mobile.
Par conséquent, le vecteur ( ) ( )[ ]Ttvth constitue un choix judicieux pour représenter
l’état du système. En étendant les considérations précédentes à d’autres classes de systèmes physiques, on notera que :

ASSERVISSEMENTS DES SYSTEMES LINEAIRES INVARIANTS DANS LE TEMPS (S.L.I.T) EN TEMPS CONTINU – cours – J.BOONAERT 2006
130
- L’énergie d’un système mécanique est caractérisée par les positions et vitesses angulaires et/ou linéaires aux différents joints.
- L’énergie d’un système électrique est caractérisée par les tensions aux bornes des condensateurs et les intensités traversant les bobines.
- L’énergie interne d’un système thermodynamique est caractérisée par les pressions, températures, enthalpies, débits de fluide, etc.
- etc. Dans ce qui suit, nous allons formaliser les notions intuitives vues dans cette introduction.
10.2 Forme des équations d’état. Dans ce qui suit, on notera ( )tX le vecteur1 d’état de dimension ncorrespondant à :
( )
( )( )
( )
=
txn
tx
tx
tX.....
2
1
. Une formulation générale d’une équation d’état revêt la forme :
( ) ( ) ( )( )ttutXFdt
tdX,,= (140), où ( )tu représente l’entrée du système.
Comme nous l’avons vu dans l’introduction, une telle équation reflète bien que l’évolution de l’état ne dépend que :
- de l’état ( )tX lui-même.
- De l’entrée ( )tu .
- Du temps t . Si le système est invariant dans le temps (c’est à dire que ses caractéristiques n’évoluent
pas à mesure que le temps passe) l’équation précédente dégénère en :
( ) ( ) ( )( )tutXFdt
tdX,= (141)
Si le système est de plus linéaire (c’est à dire que les opérateurs appliqués au signal d’entrée se limitent à une combinaison d’opérations linéaires telles que l’amplification/l’atténuation, la dérivation, l’intégration, etc.), on montre que l’équation d’état prend la forme particulière suivante :
( ) ( ) ( )tuBtXAdt
tdX ⋅+⋅= , où Aest une matrice carrée nn× et B un vecteur colonne à
ncomposantes (cette équation correspond à l’équation d’évolution de l’état).
On ce qui concerne la sortie ( )ty du système linéaire, celle-ci est alors obtenue par
combinaison linéaire des composantes du vecteur d’état suivant l’équation :
( ) ( ) ( )tuDtXCty ⋅+⋅= , où C est un vecteur ligne à ncomposantes et D un scalaire (cette
équation correspond à l’équation d’observation de la sortie). Dans ce qui suit, nous appellerons équations d’état la paire formée par l’équation d’évolution et l’équation d’observation, à savoir :
( ) ( )( ) ( ) ( )
⋅+⋅=
⋅+⋅=
tuDtXCty
tuBtXAdt
dX (142)
1 On fera grâce de la flèche qui se devrait d’orner tout vecteur digne de ce nom…

ASSERVISSEMENTS DES SYSTEMES LINEAIRES INVARIANTS DANS LE TEMPS (S.L.I.T) EN TEMPS CONTINU – cours – J.BOONAERT 2006
131
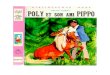
10.3 Exemples de modélisation par les équations d’état. 10.3.1 Le moteur à courant continu commandé par l’induit. Pour illustrer le propos, prenons l’exemple plus que classique du moteur à courant continu commandé par l’induit (à flux constant), dont le schéma équivalent est rappelé ci-dessous :
R
L
e(t)
u(t)
i(t)
f (frottementsvisqueux)
J (moment d’inertietotal )
fig 100: schéma équivalent d’un moteur à courant continu commandé par l’induit.
Nous nous intéressons à la position angulaire ( )tθ de l’arbre de sortie, la grandeur d’entrée étant
la tension d’induit ( )tu . Il s’agit d’un système électromécanique. Son énergie interne peut être
caractérisée par la vitesse angulaire ( )tω et la position angulaire ( )tθ de l’arbre de sortie (ceci
pour la partie mécanique du système) ainsi que par l’intensité ( )ti traversant l’induit (ceci pour la
partie électrique). Un vecteur d’état convenable est donc :
( )( )( )( )
=ti
t
t
tX ωθ
On rappelle que les équations régissant le comportement d’un moteur à courant continu commandé par l’induit sont :
( ) ( )
( ) ( )( ) ( ) ( )
⋅−=⋅
⋅=
=
tftCdt
tdJ
tiKtCdt
tdt
m
Cm
ωω
θωoù ( )tCm est le couple moteur, J le moment d’inertie ramené sur
l’axe de l’ensemble {axe + rotor + charge}, CK la constante moteur et f le coefficient de
frottement visqueux. Les autres équations sont :
( ) ( ) ( ) ( )( ) ( )
⋅=
+⋅+⋅=
tKte
tedt
tdiLtiRtu
e ω où Ret L dénotent respectivement la résistance et l’inductance
de l’induit, ( )te la force contre électromotrice et eK la constante électrique.
En arrangeant ces différentes équations, on arrive facilement à :
ASSERVISSEMENTS DES SYSTEMES LINEAIRES INVARIANTS DANS LE TEMPS (S.L.I.T) EN TEMPS CONTINU – cours – J.BOONAERT 2006
132
( ) ( )( ) ( ) ( )
( ) ( ) ( ) ( )
⋅+⋅−⋅−=
⋅+⋅−=
=
tuL
tiL
Rt
L
K
dt
tdi
tiJ
Kt
J
f
dt
td
tdt
td
e
C
1ω
ωω
ωθ
, il est par ailleurs clair que ( ) ( )tty θ= .
Ceci se traduit matriciellement par :
( )
( )
( )
( )( ) ( )tu
L
tX
L
R
L
KJ
K
J
f
dt
tdidt
tddt
td
dt
tdX
e
C ⋅
+⋅
−−
−=
=10
0
0
0
010ω
θ
et ( ) [ ] ( )tXty ⋅= 001
Par rapport à la forme générique, nous avons donc :
−−
−=
L
R
L
KJ
K
J
fA
e
C
0
0
010
(143-a),
=
L
B10
0
(143-b), [ ]001=C (143-c) et 0=D (143-d)
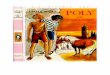
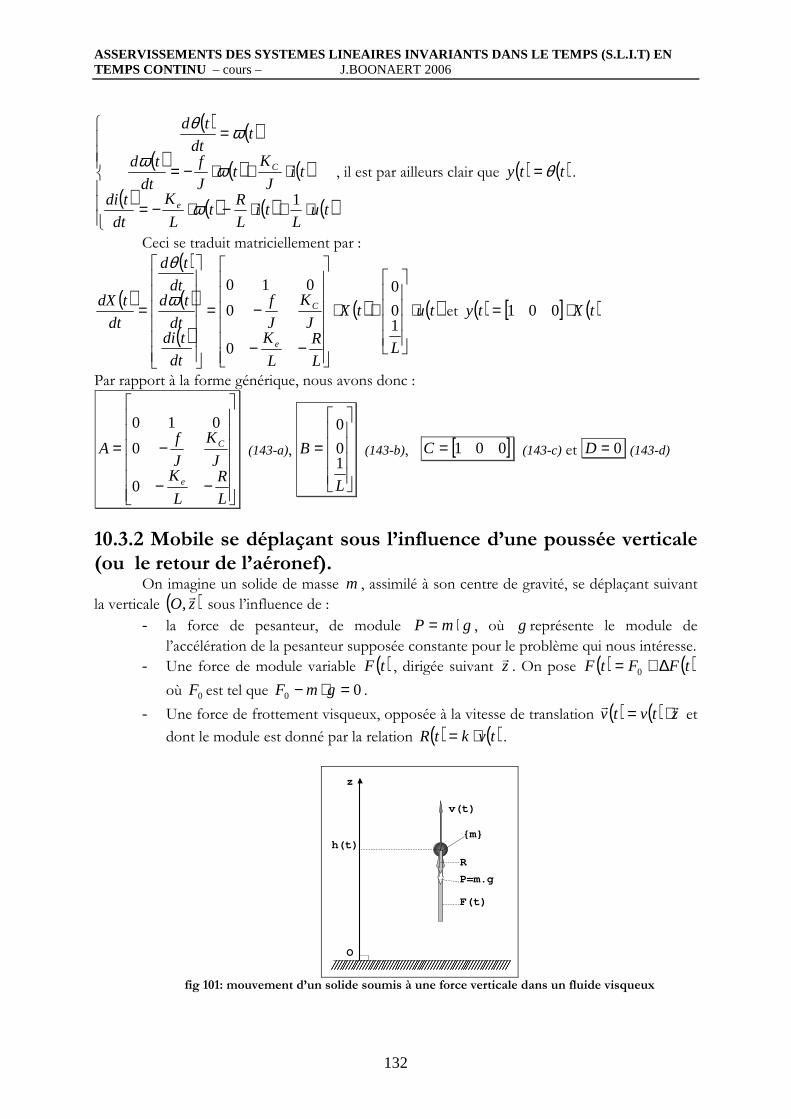
10.3.2 Mobile se déplaçant sous l’influence d’une poussée verticale (ou le retour de l’aéronef). On imagine un solide de masse m , assimilé à son centre de gravité, se déplaçant suivant
la verticale ( )zOr
, sous l’influence de :
- la force de pesanteur, de module gmP ⋅= , où g représente le module de
l’accélération de la pesanteur supposée constante pour le problème qui nous intéresse.
- Une force de module variable ( )tF , dirigée suivant zr
. On pose ( ) ( )tFFtF ∆+= 0
où 0F est tel que 00 =⋅− gmF .
- Une force de frottement visqueux, opposée à la vitesse de translation ( ) ( ) ztvtvrr ⋅= et
dont le module est donné par la relation ( ) ( )tvktR ⋅= .
F(t)
{m}h(t)
v(t)
O
z
P=m.g
R
fig 101: mouvement d’un solide soumis à une force verticale dans un fluide visqueux

ASSERVISSEMENTS DES SYSTEMES LINEAIRES INVARIANTS DANS LE TEMPS (S.L.I.T) EN TEMPS CONTINU – cours – J.BOONAERT 2006
133
En assimilant ( )tF∆ à l’entrée du système et l’altitude atteinte ( )th à sa sortie, proposer
des équations d’état modélisant le système représenté sur la figure ci-avant. Solution : Il faut tout d’abord définir un vecteur d’état convenable. Compte tenu de la contrepartie physique de cette notion, un « bon » vecteur d’état rassemble dans ce cas les grandeurs propres à caractériser l’énergie du système. Cette énergie s’exprime ici sous forme mécanique. Celle-ci comprend :
- L’énergie cinétique (connue si ( )tv est connu).
- L’énergie potentielle de pesanteur (connue à une constante près si ( )th est connu).
Un vecteur d’état convenable sera donc ( ) ( )[ ]Ttvthx = .
En ce qui concerne les équations, celles-ci sont données par la relation fondamentale de la dynamique d’une part :
( ) ( ) ( ) ( ) ( ) ( )dt
tdvmtvkgmFtF
dt
tdvmtvkgmtF ⋅=⋅−⋅−+∆⇔⋅=⋅−⋅− 0 qui se
simplifie en ( ) ( ) ( )dt
tdvmtvktF ⋅=⋅−∆ (A)
Ainsi que par les relations immédiates liant les différentes grandeurs entre elles :
( ) ( )( ) [ ] ( )
⋅=
=
txth
tvdt
tdh
01
Nous aboutissons donc à :
( ) ( )( ) ( ) ( )
∆⋅+⋅−=
=
tFm
tvm
k
dt
tdv
tvdt
tdh
1 et ( ) [ ] ( )txth ⋅= 01
Les équations d’état découlent directement du système de relation précédent et s’écrivent :
( ) ( ) ( )tFm
txm
kdt
tdx ∆⋅
+⋅
−= 10
0
10 (144-a), ( ) [ ] ( )txth ⋅= 01 (144-b)
10.4 Equations d’état équivalentes. Les équations d’état d’un système donnée ne sont pas uniques, car définies à un changement de base près. Comme nous le verrons par la suite, il peut s’avérer intéressant de passer d’une représentation d’état à une autre (bien entendu équivalente), c’est à dire de considérer comme nouveau vecteur d’état un vecteur dont chaque composante serait obtenue par combinaison linéaire de celles du vecteur d’état original, suivant l’équation :
xTz ⋅= (145), T étant régulière. Il est facile de montrer dans ce cas que les nouvelles équations d’état sont données par :
( ) ( ) ( ) ( )( ) ( ) ( )
⋅+⋅⋅=
⋅⋅+⋅⋅⋅=−
−
tuDzTCty
tuBTzTATdt
tdz
1
1
(146)

ASSERVISSEMENTS DES SYSTEMES LINEAIRES INVARIANTS DANS LE TEMPS (S.L.I.T) EN TEMPS CONTINU – cours – J.BOONAERT 2006
134
La matrice A , les vecteurs B et C ainsi que le scalaire D correspondent à la
représentation initiale. Comme d’habitude, ( )tu et ( )ty représentent respectivement l’entrée et la
sortie de ce système monovariable.
10.5 « Equivalent » graphique des équations d’état. Il est possible d’associer une représentation graphique aux équations d’état sous la forme d’une sorte de schéma-bloc. Il faut toutefois garder à l’esprit que les grandeurs manipulées par les différents blocs de transfert sont a priori vectorielles :
∫∫BB
DD
CC++
++
AA
++
++
( )tu
( )tx( )
dt
tdx
( )ty
fig 102 : « équivalent » graphique des équations d’état d’un système linéaire.
10.6 Conversion Etat/Transfert. 10.6.1 Formule de conversion. Il est intéressant d’être capable de retrouver l’expression de la fonction de transfert à partir des équations d’état associé au système étudié. Soit le système régi par les équations d’état suivantes :
( ) ( ) ( )( ) ( ) ( )
⋅+⋅=
⋅+⋅=
tuDtxCty
tuBtxAdt
tdx (142-bis)
Si on admet qu’on peut généraliser « l’opérateur de dérivation » p et la transformation de
Laplace à des grandeurs vectorielles alors, en posant ( ) ( )[ ]txLpX = , ( ) ( )[ ]tuLpU = et
( ) ( )[ ]tyLpY = , l’équation (142-bis) donne :
( ) ( ) ( )( ) ( ) ( )
⋅+⋅=⋅+⋅=⋅⋅pUDpXCpY
pUBpXApXIp (147)
d’où : ( ) ( ) ( ) ( ) ( ) ( )pUBAIppXpUBpXAIp ⋅⋅−⋅=⇒⋅=⋅−⋅ −1. Dans cette équation, I est
la matrice identité de même dimension que ( )tx .
Cette expression, réinjectée dans la seconde équation du système (147) conduit à :

ASSERVISSEMENTS DES SYSTEMES LINEAIRES INVARIANTS DANS LE TEMPS (S.L.I.T) EN TEMPS CONTINU – cours – J.BOONAERT 2006
135
( ) ( ) ( ) ( ) ( )[ ] ( )pUDBAIpCpUDpUBAIpCpY ⋅+⋅−⋅⋅=⋅+⋅⋅−⋅⋅= −− 11
d’où finalement l’expression de la fonction de transfert :
( )( ) ( ) DBAIpCpU
pY +⋅−⋅⋅= −1 (148)
10.6.2 Exemple d’application. Soit le système défini par les équations d’état suivantes :
( ) ( ) ( )( ) [ ] ( )
⋅=
⋅
+⋅
−=
txty
tuk
txdt
tdx
10001
01ττ
Il s’agit de calculer la fonction de transfert ( )pH correspondante. On a alors :
−
+=−⋅p
pAIp1
01
τ , donc ( )
+⋅=−⋅τ1
det ppAIp , ce qui permet de calculer
( )
+⋅
+⋅=−⋅ −
ττ
11
0
111
p
p
pp
AIp .
On en déduit ( )
⋅⋅
+⋅=⋅−⋅ −
τ
τ
τk
pk
pp
BAIp1
11, d’où
( ) ( )τ
τ1
1
+⋅=⋅−⋅⋅ −
pp
kBAIpC . Comme ici 0=D , on en déduit directement :
( ) ( )pp
kpH
⋅+⋅=
τ1
10.7 Conversion Transfert/Etat. 10.7.1 Intérêt de la conversion. On traite ici le problème symétrique au précédent, à savoir qu’étant donnée une fonction de transfert, on recherche des équations d’état le représentant. On gardera à l’esprit que les équations d’état d’un système donné ne sont pas uniques, puisque toute matrice régulière T permet de définir de nouvelles équations d’état, équivalentes aux précédentes, sur la base du
nouveau vecteur d’état ( ) ( )txTtz ⋅= .
Les techniques liées à l’identification des systèmes linéaires permettent d’accéder à la fonction de transfert du système. Il peut alors d’avérer intéressant de pouvoir en déduire des équations d’états. Nous allons voir ici quelques méthodes de base permettant d’aboutir à ce résultat.
10.7.2 Intégrateur. Il s’agit du cas fondamental, qui permet par « assemblage » des équations d’obtenir le résultat voulu dans des cas plus complexes.
ASSERVISSEMENTS DES SYSTEMES LINEAIRES INVARIANTS DANS LE TEMPS (S.L.I.T) EN TEMPS CONTINU – cours – J.BOONAERT 2006
136
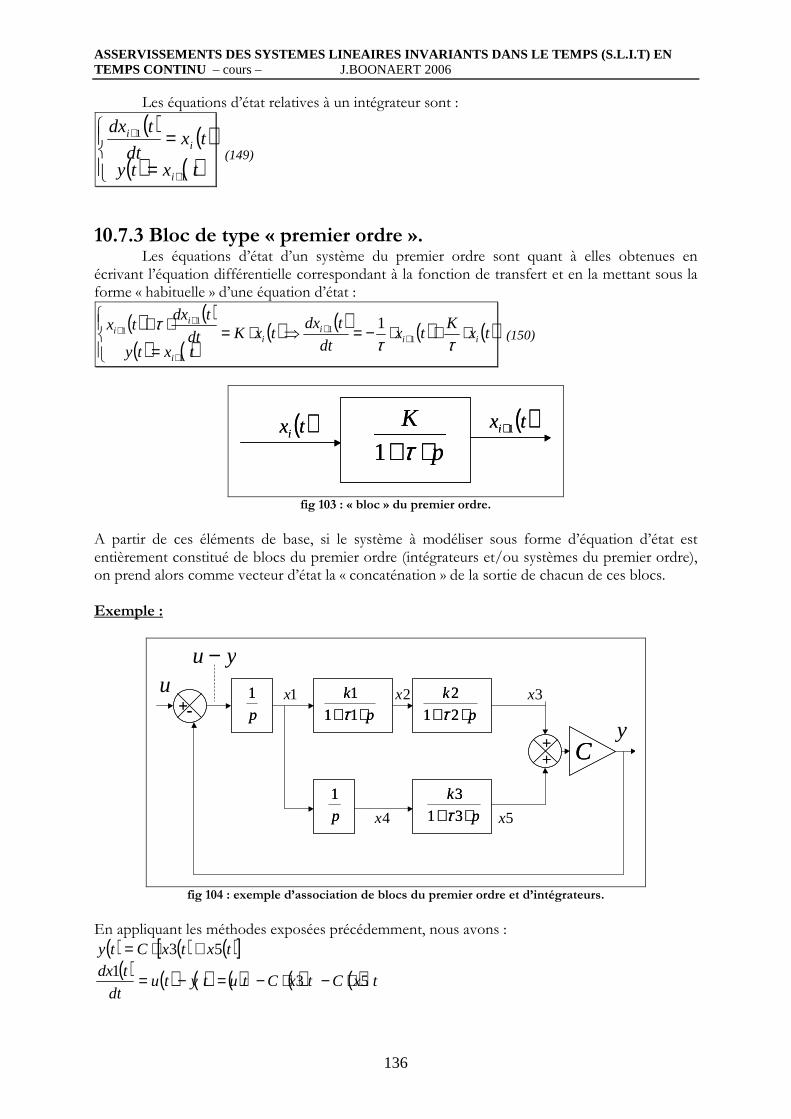
Les équations d’état relatives à un intégrateur sont :
( ) ( )( ) ( )
=
=
+
+
txty
txdt
tdx
i
ii
1
1
(149)
10.7.3 Bloc de type « premier ordre ». Les équations d’état d’un système du premier ordre sont quant à elles obtenues en écrivant l’équation différentielle correspondant à la fonction de transfert et en la mettant sous la forme « habituelle » d’une équation d’état :
( ) ( )
( ) ( )( ) ( ) ( ) ( )tx
Ktx
dt
tdxtxK
txtydt
tdxtx
iii
i
i
ii ⋅+⋅−=⇒⋅=
=
⋅++
+
+
++
τττ
11
1
11
1 (150)
p
K
⋅+τ1( )txi
( )txi 1+
p
K
⋅+τ1( )txi
( )txi 1+
fig 103 : « bloc » du premier ordre.
A partir de ces éléments de base, si le système à modéliser sous forme d’équation d’état est entièrement constitué de blocs du premier ordre (intégrateurs et/ou systèmes du premier ordre), on prend alors comme vecteur d’état la « concaténation » de la sortie de chacun de ces blocs. Exemple :
p
k
⋅+ 11
1
τ p
k
⋅+ 11
1
τ1x 2x 3x
4x
p
k
⋅+ 21
2
τ p
k
⋅+ 21
2
τ
p
k
⋅+ 31
3
τ p
k
⋅+ 31
3
τ
p
1
p
1
p
1
p
1
+-+-
++++
5x
CC
uyu −
y
fig 104 : exemple d’association de blocs du premier ordre et d’intégrateurs.
En appliquant les méthodes exposées précédemment, nous avons :
( ) ( ) ( )[ ]txtxCty 53 +⋅=
( ) ( ) ( ) ( ) ( ) ( )txCtxCtutytudt
tdx53
1 ⋅−⋅−=−=

ASSERVISSEMENTS DES SYSTEMES LINEAIRES INVARIANTS DANS LE TEMPS (S.L.I.T) EN TEMPS CONTINU – cours – J.BOONAERT 2006
137
( ) ( ) ( )txk
txdt
tdx1
1
12
1
12 ⋅+⋅−=ττ
( ) ( ) ( )txk
txdt
tdx2
2
23
2
13 ⋅+⋅−=ττ
( ) ( )txdt
tdx1
4 =
( ) ( ) ( )txk
txdt
tdx4
3
35
3
15 ⋅+⋅−=ττ
Ce qui donne, en assemblant ces différentes équations sous la forme « habituelle » :
( )
( )
( )
( )
( )
( )( )( )( )( )
( )tu
tx
tx
tx
tx
tx
k
k
kCC
dt
tdxdt
tdxdt
tdxdt
tdxdt
tdx
⋅
+
⋅
−
−
−−−
=
0
0
0
0
1
5
4
3
2
1
3
1
3
3000
00001
002
1
2
20
0001
1
1
1000
5
4
3
2
1
ττ
ττ
ττ
( ) [ ]
( )( )( )( )( )
⋅=
tx
tx
tx
tx
tx
CCty
5
4
3
2
1
000
10.7.4 Conversion Transfert Etat pour les fonctions de transfert à numérateur scalaire. 10.7.4.1 Procédure générale. On appelle fonction de transfert à numérateur scalaire toute fonction de transfert pouvant s’écrire sous la forme :
( )n
ini
nnn apapapap
bpH
++⋅++⋅+⋅+= −−− ......2 21
1
Dans ce cas, il est commode de prendre pour vecteur d’état :
( ) ( ) ( ) ( ) ( ) T
n
n
dt
tyd
dt
tyd
dt
tdytytx
= −
−
1
1
2
2
.... (151)
On obtient alors :
[ ] ( ) ( )txdt
tdxni i
i1,1,0 +=−∈∀ (152-a) et ( ) [ ] ( )txty ⋅= 0...001 (152-b).

ASSERVISSEMENTS DES SYSTEMES LINEAIRES INVARIANTS DANS LE TEMPS (S.L.I.T) EN TEMPS CONTINU – cours – J.BOONAERT 2006
138
La dernière ligne de la matrice d’évolution d’état est tout simplement obtenue en explicitant l’équation différentielle correspondant à la fonction de transfert, ce qui donne :
( ) ( ) ( )tu
b
tx
aaa
dt
tdx
nn
⋅
+⋅
−−−
=
−
0
:
0
0
1......
10......0
...............
0...100
0...010
1
(152-c)
Cette forme particulière de la matrice d’évolution d’état porte le nom de matrice compagne.
10.7.4.2 Exemple : application au système du second ordre. On part de la forme canonique de la fonction de transfert d’un système du second ordre, à savoir :
( )2
221nn
ppm
kpH
ωω +⋅⋅+= , qui peut se mettre sous la forme
22
2
2 nn
n
pmpk
ωωω
+⋅⋅⋅+⋅ . Il découle
directement de ce qui précède les équations d’état suivantes :
( ) [ ] ( ) [ ] ( )tuktxmdttdx
nnn⋅⋅+⋅⋅⋅−−= 22
02
10ωωω (153-a) et ( ) [ ] ( )txty ⋅= 01 (153-b)
10.7.5 Conversion Transfert Etat en exploitant la forme modale.
Soit une fonction de transfert s’écrivant sous la forme ( )anpapap
bmpbpbpH
nnn
mm
+⋅+⋅++⋅+⋅= −−
−
21
1
21
10 et
possédant npôles distincts. Sous l’hypothèse nm < , cette fonction de transfert admet une décomposition en éléments simples :
( ) ( )∑= −
=n
i i
i
ppH
1 αβ
(154-a) , avec ( )
( )∏≠=
−=
n
ijj
j
ii
p
N
1
α
αβ (154-b), ayant posé ( ) ( )( )∏
=
−=
n
iip
pNpH
1
α
(154-c). Les équations d’état peuvent alors se mettre sous la forme :
( ) ( ) ( )tutxdt
tdx
n
n
⋅
+⋅
=
−
1
1
:
1
1
0000
0000
..........
0...00
0...00
1
2
1
αα
αα
(155-a)
et ( ) [ ] ( ) ( )tutxty nn ⋅+⋅= − 0121 .... βββββ (155-b)
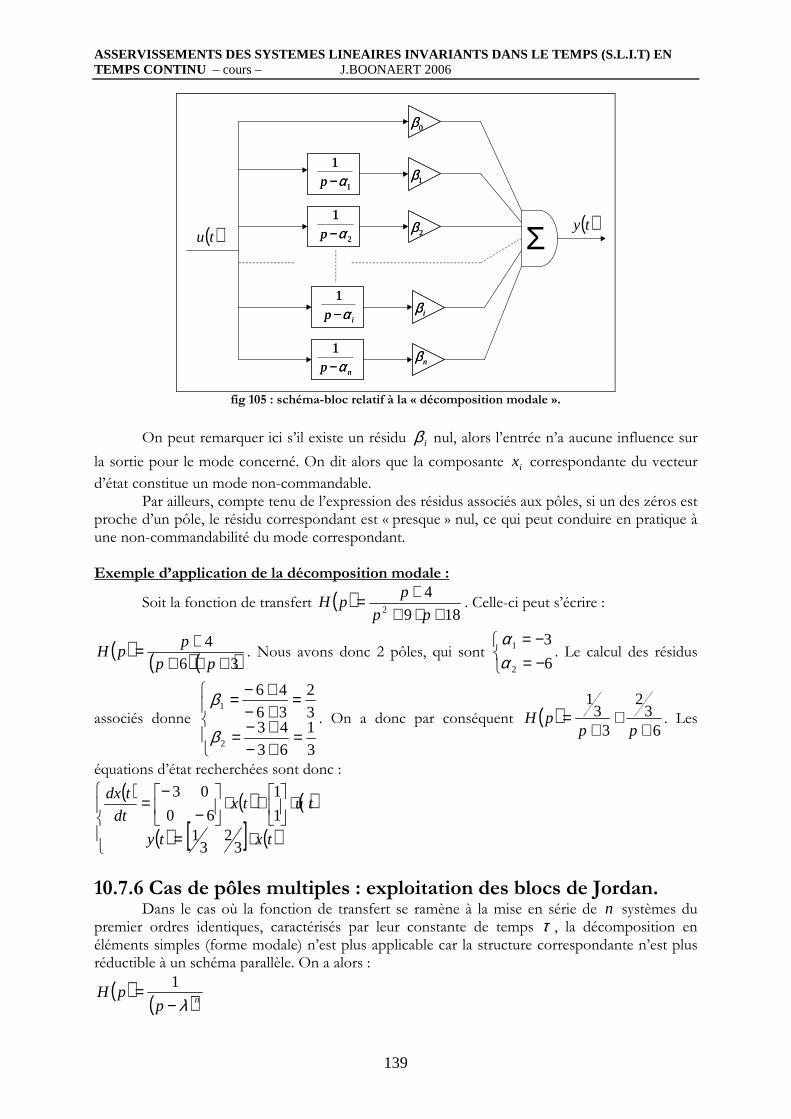
Le schéma bloc associé fait alors apparaître une structure parallèle :
ASSERVISSEMENTS DES SYSTEMES LINEAIRES INVARIANTS DANS LE TEMPS (S.L.I.T) EN TEMPS CONTINU – cours – J.BOONAERT 2006
139
0β0β
1β1β
2β2β
iβ iβ
nβnβ
2
1
α−p 2
1
α−p
1
1
α−p 1
1
α−p
ip α−1
ip α−1
np α−1
np α−1
Σ( )tu( )ty
fig 105 : schéma-bloc relatif à la « décomposition modale ».
On peut remarquer ici s’il existe un résidu iβ nul, alors l’entrée n’a aucune influence sur
la sortie pour le mode concerné. On dit alors que la composante ix correspondante du vecteur
d’état constitue un mode non-commandable. Par ailleurs, compte tenu de l’expression des résidus associés aux pôles, si un des zéros est proche d’un pôle, le résidu correspondant est « presque » nul, ce qui peut conduire en pratique à une non-commandabilité du mode correspondant. Exemple d’application de la décomposition modale :
Soit la fonction de transfert ( )189
42 +⋅+
+=pp
ppH . Celle-ci peut s’écrire :
( ) ( ) ( )36
4
+⋅++=
pp
ppH . Nous avons donc 2 pôles, qui sont
−=−=
6
3
2
1
αα
. Le calcul des résidus
associés donne
=+−+−=
=+−+−=
3
1
63
433
2
36
46
2
1
β
β. On a donc par conséquent ( )
63
2
33
1
++
+=
pppH . Les
équations d’état recherchées sont donc :
( ) ( ) ( )
( ) [ ] ( )
⋅=
⋅
+⋅
−−
=
txty
tutxdt
tdx
32
31
1
1
60
03
10.7.6 Cas de pôles multiples : exploitation des blocs de Jordan. Dans le cas où la fonction de transfert se ramène à la mise en série de n systèmes du premier ordres identiques, caractérisés par leur constante de temps τ , la décomposition en éléments simples (forme modale) n’est plus applicable car la structure correspondante n’est plus réductible à un schéma parallèle. On a alors :
( )( )np
pHλ−
= 1

ASSERVISSEMENTS DES SYSTEMES LINEAIRES INVARIANTS DANS LE TEMPS (S.L.I.T) EN TEMPS CONTINU – cours – J.BOONAERT 2006
140
Dans ce cas, il est commode de considérer que les modes de l’état sont les sorties de chacun des blocs du premier ordre :
λ−p
1
λ−p
1
λ−p
1
λ−p
1
λ−p
1
λ−p
1( )tu ( )txn ( )txn 1− ( )tx1
( )ty
fig 106 : schéma-bloc relatif à la présence d’un pôle multiple (cas d’une fonction de transfert à numérateur scalaire).
Pour chaque mode, nous avons ( )
iii xxdt
tdx+⋅= −
−1
1 λ (156), ce qui donne en « assemblant » :
( ) ( ) ( )tutxdt
tdx ⋅
+⋅
=
1
0
:
0
0
0......0
1......0
...............
0...10
0...01
λλ
λλ
(157-a) et ( ) [ ] ( )txty ⋅= 0......01 (157-b)
La matrice d’évolution d’état constitue alors un bloc de Jordan.
10.8 Formes particulières des équations d’état. Pour certaines formes du vecteur d’état, les différentes matrices impliquées dans l’écriture des équations d’état prennent des formes particulières. Ainsi : Forme commandable (dite forme canonique de commandabilité) :
( ) ( ) ( )tutx
aaaa
dt
tdx
n
⋅
+⋅
−−−−
=
0
...
0
0
1
010...0
...............
0...010
0...001
...321
(158-a)
et ( ) [ ] ( )txbbbbty n ⋅= ...321 (158-b)
qui correspond au transfert ( ) ( ) ( ) ( )pUpApBpY ⋅⋅= −1 où ( ) ( )[ ]tyLpY = et ( ) ( )[ ]tuLpU =
avec :
( )( )
++⋅+⋅=++⋅+⋅+=
−−
−−
nnn
nnnn
bpbpbpB
apapappA
...
...2
21
1
22
11
ASSERVISSEMENTS DES SYSTEMES LINEAIRES INVARIANTS DANS LE TEMPS (S.L.I.T) EN TEMPS CONTINU – cours – J.BOONAERT 2006
141
Forme observable (dite forme canonique d’observabilité) :
( ) ( ) ( )tu
b
b
b
b
tx
a
a
a
a
dt
tdx
n
n
n
n
⋅
+⋅
−−
−−
=
−− 1
2
1
1
2
1
:
0...00
10...0
...............
0...10
0...01
(159-a)
et ( ) [ ] ( )txty ⋅= 0...001 (159-b)
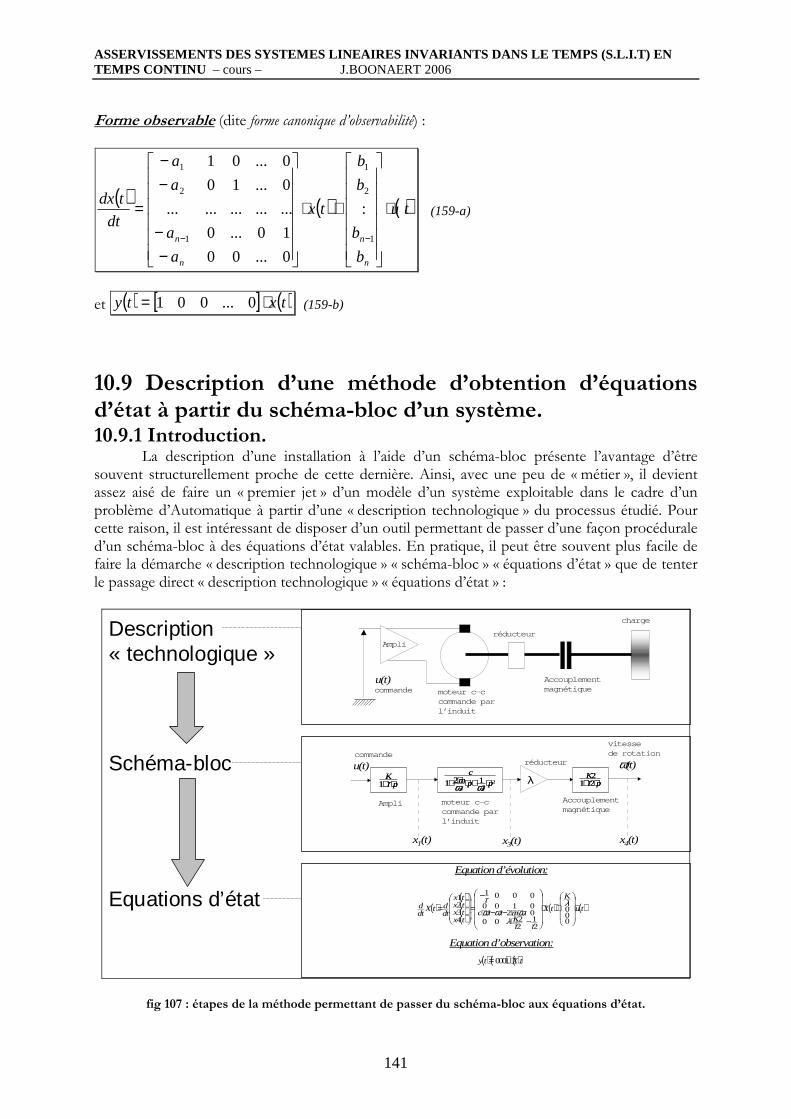
10.9 Description d’une méthode d’obtention d’équations d’état à partir du schéma-bloc d’un système. 10.9.1 Introduction.
La description d’une installation à l’aide d’un schéma-bloc présente l’avantage d’être souvent structurellement proche de cette dernière. Ainsi, avec une peu de « métier », il devient assez aisé de faire un « premier jet » d’un modèle d’un système exploitable dans le cadre d’un problème d’Automatique à partir d’une « description technologique » du processus étudié. Pour cette raison, il est intéressant de disposer d’un outil permettant de passer d’une façon procédurale d’un schéma-bloc à des équations d’état valables. En pratique, il peut être souvent plus facile de faire la démarche « description technologique » « schéma-bloc » « équations d’état » que de tenter le passage direct « description technologique » « équations d’état » :
moteur c-ccommande parl’induit
réducteur
Accouplementmagnétique
charge
Ampli
u(t)commande
pK
⋅+τ1 pK
⋅+τ1 22
121 ppmc
nn⋅+⋅⋅+ ωω
22
121 ppmc
nn⋅+⋅⋅+ ωω
Ampli moteur c-ccommande parl’induit
réducteur
λ pK
⋅+ 212
τ pK
⋅+ 212
τ
Accouplementmagnétique
u(t) ω(t)commande
vitessede rotation
x1(t) x3(t) x4(t)
( )( )( )( )( )
( ) ( )tu
K
tXKmc
txtxtxtx
dtdtX
dtd
nnn⋅
+⋅
−⋅⋅⋅−−⋅
−
=
=
000
21
2200
0201000001
4321
22
λ
ττλωωω
τ
( ) ( ) ( )tXty ⋅= 1000
Equation d’évolution:
Equation d’observation:
Description « technologique »
Schéma-bloc
Equations d’état
fig 107 : étapes de la méthode permettant de passer du schéma-bloc aux équations d’état.
ASSERVISSEMENTS DES SYSTEMES LINEAIRES INVARIANTS DANS LE TEMPS (S.L.I.T) EN TEMPS CONTINU – cours – J.BOONAERT 2006
142
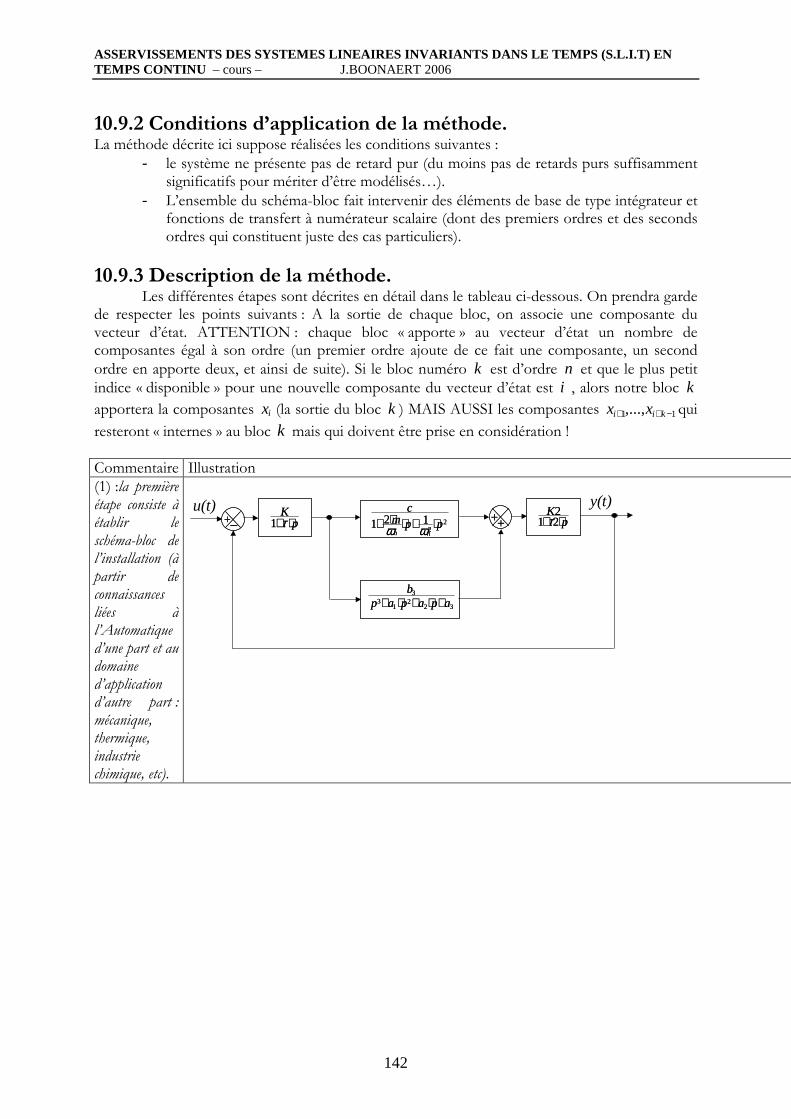
10.9.2 Conditions d’application de la méthode. La méthode décrite ici suppose réalisées les conditions suivantes :
- le système ne présente pas de retard pur (du moins pas de retards purs suffisamment significatifs pour mériter d’être modélisés…).
- L’ensemble du schéma-bloc fait intervenir des éléments de base de type intégrateur et fonctions de transfert à numérateur scalaire (dont des premiers ordres et des seconds ordres qui constituent juste des cas particuliers).
10.9.3 Description de la méthode. Les différentes étapes sont décrites en détail dans le tableau ci-dessous. On prendra garde
de respecter les points suivants : A la sortie de chaque bloc, on associe une composante du vecteur d’état. ATTENTION : chaque bloc « apporte » au vecteur d’état un nombre de composantes égal à son ordre (un premier ordre ajoute de ce fait une composante, un second ordre en apporte deux, et ainsi de suite). Si le bloc numéro k est d’ordre n et que le plus petit indice « disponible » pour une nouvelle composante du vecteur d’état est i , alors notre bloc k
apportera la composantes ix (la sortie du bloc k ) MAIS AUSSI les composantes 11,..., −++ kii xx qui
resteront « internes » au bloc k mais qui doivent être prise en considération ! Commentaire Illustration (1) :la première étape consiste à établir le schéma-bloc de l’installation (à partir de connaissances liées à l’Automatique d’une part et au domaine d’application d’autre part : mécanique, thermique, industrie chimique, etc).
pK
⋅+ 212
τ pK
⋅+ 212
τ22
121 ppmc
nn⋅+⋅⋅+ ωω
22
121 ppmc
nn⋅+⋅⋅+ ωω
322
13
3
apapapb
+⋅+⋅+ 322
13
3
apapapb
+⋅+⋅+
pK
⋅+τ1 pK
⋅+τ1+_+_ ++++u(t) y(t)
ASSERVISSEMENTS DES SYSTEMES LINEAIRES INVARIANTS DANS LE TEMPS (S.L.I.T) EN TEMPS CONTINU – cours – J.BOONAERT 2006
143
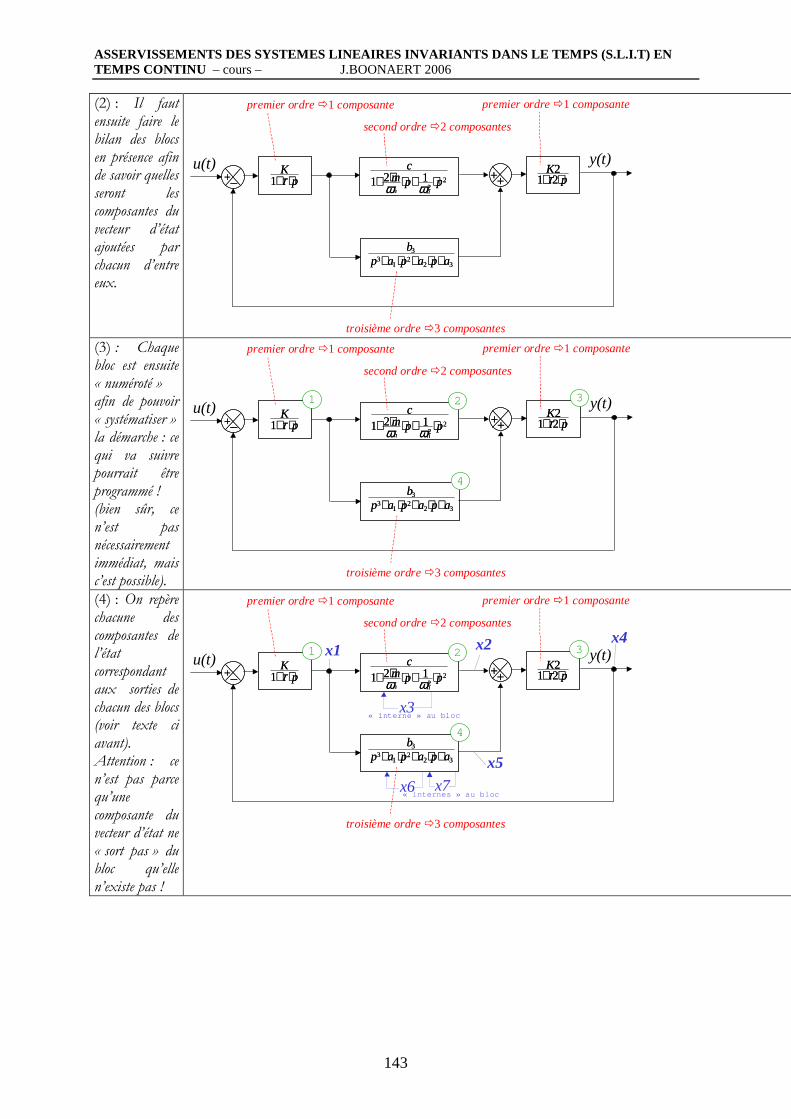
(2) : Il faut ensuite faire le bilan des blocs en présence afin de savoir quelles seront les composantes du vecteur d’état ajoutées par chacun d’entre eux.
pK
⋅+ 212
τ pK
⋅+ 212
τ22
121 ppmc
nn⋅+⋅⋅+ ωω
22
121 ppmc
nn⋅+⋅⋅+ ωω
322
13
3
apapapb
+⋅+⋅+ 322
13
3
apapapb
+⋅+⋅+
pK
⋅+τ1 pK
⋅+τ1+_+_ ++++u(t) y(t)
premier ordre�1 composante
second ordre�2 composantes
premier ordre�1 composante
troisième ordre�3 composantes (3) : Chaque bloc est ensuite « numéroté » afin de pouvoir « systématiser » la démarche : ce qui va suivre pourrait être programmé ! (bien sûr, ce n’est pas nécessairement immédiat, mais c’est possible).
pK
⋅+ 212
τ pK
⋅+ 212
τ22
121 ppmc
nn⋅+⋅⋅+ ωω
22
121 ppmc
nn⋅+⋅⋅+ ωω
322
13
3
apapapb
+⋅+⋅+ 322
13
3
apapapb
+⋅+⋅+
pK
⋅+τ1 pK
⋅+τ1+_+_ ++++u(t) y(t)
premier ordre�1 composante
second ordre�2 composantes
premier ordre�1 composante
troisième ordre�3 composantes
1 2 3
4
(4) : On repère chacune des composantes de l’état correspondant aux sorties de chacun des blocs (voir texte ci avant). Attention : ce n’est pas parce qu’une composante du vecteur d’état ne « sort pas » du bloc qu’elle n’existe pas !
pK
⋅+ 212
τ pK
⋅+ 212
τ22
121 ppmc
nn⋅+⋅⋅+ ωω
22
121 ppmc
nn⋅+⋅⋅+ ωω
322
13
3
apapapb
+⋅+⋅+ 322
13
3
apapapb
+⋅+⋅+
pK
⋅+τ1 pK
⋅+τ1+_+_ ++++u(t) y(t)
premier ordre�1 composante
second ordre�2 composantes
premier ordre�1 composante
troisième ordre�3 composantes
1 2 3
4
x1 x2 x4
x5
x3
x6 x7
« interne » au bloc
« internes » au bloc
ASSERVISSEMENTS DES SYSTEMES LINEAIRES INVARIANTS DANS LE TEMPS (S.L.I.T) EN TEMPS CONTINU – cours – J.BOONAERT 2006
144
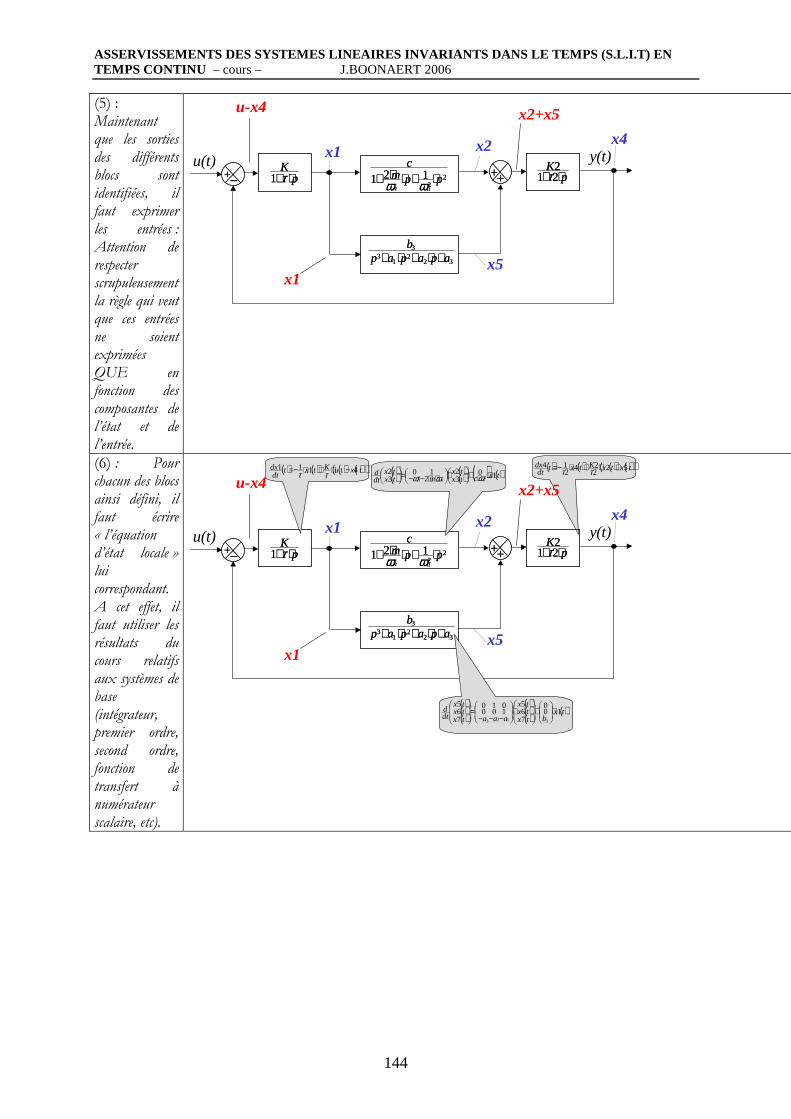
(5) : Maintenant que les sorties des différents blocs sont identifiées, il faut exprimer les entrées : Attention de respecter scrupuleusement la règle qui veut que ces entrées ne soient exprimées QUE en fonction des composantes de l’état et de l’entrée.
pK
⋅+ 212
τ pK
⋅+ 212
τ22
121 ppmc
nn⋅+⋅⋅+ ωω
22
121 ppmc
nn⋅+⋅⋅+ ωω
322
13
3
apapapb
+⋅+⋅+ 322
13
3
apapapb
+⋅+⋅+
pK
⋅+τ1 pK
⋅+τ1+_+_ ++++u(t) y(t)x1 x2 x4
x5
u-x4
x1
x2+x5
(6) : Pour chacun des blocs ainsi défini, il faut écrire « l’équation d’état locale » lui correspondant. A cet effet, il faut utiliser les résultats du cours relatifs aux systèmes de base (intégrateur, premier ordre, second ordre, fonction de transfert à numérateur scalaire, etc).
pK
⋅+ 212
τ pK
⋅+ 212
τ22
121 ppmc
nn⋅+⋅⋅+ ωω
22
121 ppmc
nn⋅+⋅⋅+ ωω
322
13
3
apapapb
+⋅+⋅+ 322
13
3
apapapb
+⋅+⋅+
pK
⋅+τ1 pK
⋅+τ1+_+_ ++++u(t) y(t)x1 x2 x4
x5
u-x4
x1
x2+x5( ) ( ) ( ) ( )( )txtuKtxt
dtdx 4111 −⋅+⋅−= ττ
( ) ( ) ( ) ( )( )txtxKtxtdt
dx 52224
214 +⋅+⋅−= ττ( )
( )( )( ) ( ) ( )txctxtx
mtxtx
dtd
nnn10
32
210
32
22 ⋅⋅+
⋅
⋅⋅−−=
ωωω
( )( )( )
( )( )( )
( )txbtx
txtx
aaatxtxtx
dtd 10
0
765
100010
765
3123
⋅
+
⋅
−−−=
ASSERVISSEMENTS DES SYSTEMES LINEAIRES INVARIANTS DANS LE TEMPS (S.L.I.T) EN TEMPS CONTINU – cours – J.BOONAERT 2006
145
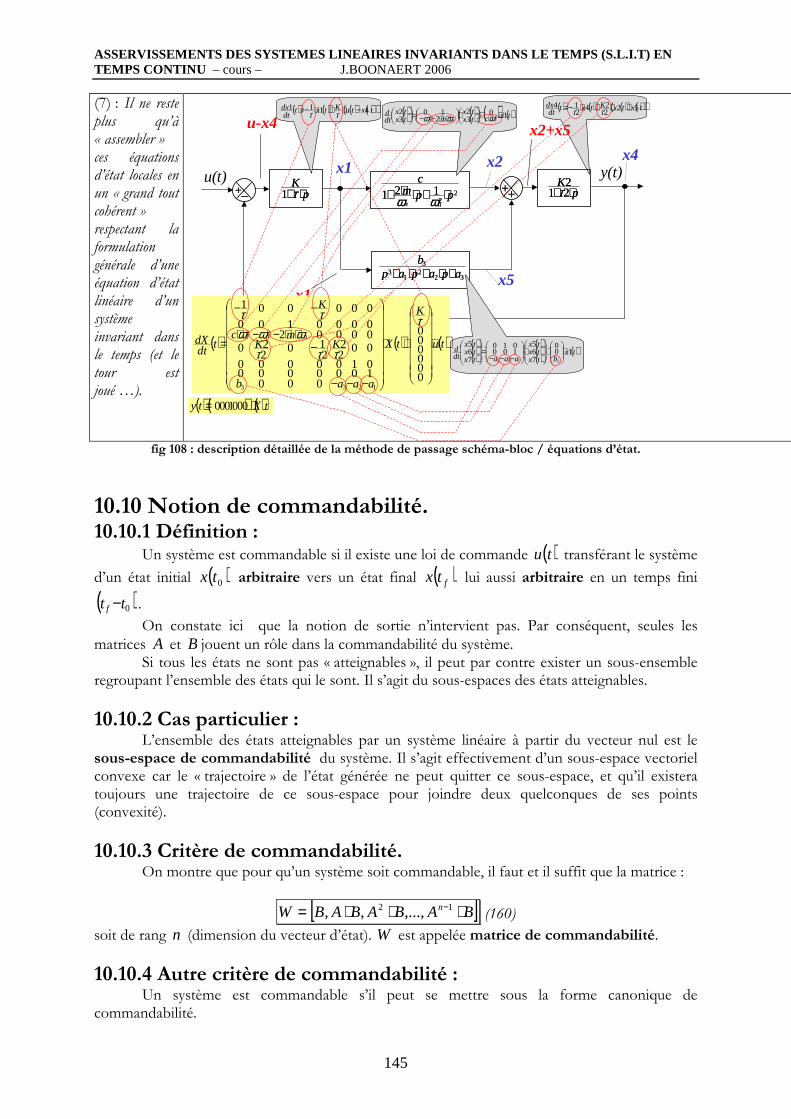
(7) : Il ne reste plus qu’à « assembler » ces équations d’état locales en un « grand tout cohérent » respectant la formulation générale d’une équation d’état linéaire d’un système invariant dans le temps (et le tour est joué …).
pK
⋅+ 212
τ pK
⋅+ 212
τ22
121 ppmc
nn⋅+⋅⋅+ ωω
22
121 ppmc
nn⋅+⋅⋅+ ωω
322
13
3
apapapb
+⋅+⋅+ 322
13
3
apapapb
+⋅+⋅+
pK
⋅+τ1 pK
⋅+τ1+_+_ ++++u(t) y(t)x1 x2 x4
x5
u-x4
x1
x2+x5( ) ( ) ( ) ( )( )txtuKtxt
dtdx 4111 −⋅+⋅−= ττ
( ) ( ) ( ) ( )( )txtxKtxtdt
dx 52224
214 +⋅+⋅−= ττ( )
( )( )( ) ( ) ( )txctxtx
mtxtx
dtd
nnn10
32
210
32
22 ⋅⋅+
⋅
⋅⋅−−=
ωωω
( )( )( )
( )( )( )
( )txbtx
txtx
aaatxtxtx
dtd 10
0
765
100010
765
3123
⋅
+
⋅
−−−=
( ) ( ) ( )tu
K
tX
aaab
KKmc
K
tdtdX nnn
⋅
+⋅
−−−
−⋅⋅−−⋅
−−
=
000000
0001000000010000000
22
210
220
000020000100000001
1233
22
τ
τττωωω
ττ
( ) ( ) ( )tXty ⋅= 0001000
fig 108 : description détaillée de la méthode de passage schéma-bloc / équations d’état.
10.10 Notion de commandabilité. 10.10.1 Définition : Un système est commandable si il existe une loi de commande ( )tu transférant le système
d’un état initial ( )0tx arbitraire vers un état final ( )ftx lui aussi arbitraire en un temps fini
( )0tt f − .
On constate ici que la notion de sortie n’intervient pas. Par conséquent, seules les matrices A et B jouent un rôle dans la commandabilité du système. Si tous les états ne sont pas « atteignables », il peut par contre exister un sous-ensemble regroupant l’ensemble des états qui le sont. Il s’agit du sous-espaces des états atteignables.
10.10.2 Cas particulier : L’ensemble des états atteignables par un système linéaire à partir du vecteur nul est le sous-espace de commandabilité du système. Il s’agit effectivement d’un sous-espace vectoriel convexe car le « trajectoire » de l’état générée ne peut quitter ce sous-espace, et qu’il existera toujours une trajectoire de ce sous-espace pour joindre deux quelconques de ses points (convexité).
10.10.3 Critère de commandabilité. On montre que pour qu’un système soit commandable, il faut et il suffit que la matrice :
[ ]BABABABW n ⋅⋅⋅= −12 ,...,,, (160)
soit de rang n (dimension du vecteur d’état). W est appelée matrice de commandabilité.
10.10.4 Autre critère de commandabilité : Un système est commandable s’il peut se mettre sous la forme canonique de commandabilité.
ASSERVISSEMENTS DES SYSTEMES LINEAIRES INVARIANTS DANS LE TEMPS (S.L.I.T) EN TEMPS CONTINU – cours – J.BOONAERT 2006
146
10.10.5 A propos des pôles commandables. On prendra garde au fait que seuls les pôles commandables apparaissent dans la fonction de transfert du système. Les autres sont implicitement simplifiés par des zéros de cette même fonction de transfert.
10.11 Notion d’observabilité. 10.11.1 Signification et définition. Cette notion permet de préciser dans quelles conditions il est possible de « recalculer » les composantes de l’état à partir de la seule connaissance de l’entrée et de la sortie du système monovariable étudié (dont on dispose bien entendu d’un modèle !). Ainsi : Un système linéaire est observable si la connaissance de l’entrée et de la sortie de celui-ci
sur un intervalle de temps [ ]10 ,tt permet de déterminer l’état ( )tx pour toute date de cet
intervalle.
10.11.2 Critère d’observabilité. On montre qu’un système est observable si la matrice :
[ ]12 ,...,,, −⋅⋅⋅= nACACACCO (161)
est de rang n (dimension du vecteur d’état). O est la matrice d’observabilité du système.
10.11.3 Autre critère d’observabilité. Un système est observable s’il peut se mettre sous la forme canonique d’observabilité.
10.11.4 A propos des pôles observables. On prendra garde au fait que, comme dans le cas de la commandabilité, seuls les pôles observables apparaissent dans l’expression de la fonction de transfert.
10.12 Commande par retour d’état avec placement de pôles. 10.12.1 Principe. L’objectif est ici de tenter de stabiliser l’état d’un système. En effet, puisque sortie et état sont linéairement liés, stabiliser l’état revient donc à stabiliser la sortie. En supposant qu’on ait accès à l’état du système, la technique consiste à élaborer une commande de la forme :
( ) ( ) ( )tyGtxKtu C⋅+⋅−= . (162)
K est alors une matrice ligne appelée matrice de gain. Le rôle de K est de stabiliser l’état, tandis que celui de G (qui est un simple gain statique dans le cas d’un système monovariable) est de constituer une action directe de la consigne (suivi de consigne ou rejet de perturbation).

ASSERVISSEMENTS DES SYSTEMES LINEAIRES INVARIANTS DANS LE TEMPS (S.L.I.T) EN TEMPS CONTINU – cours – J.BOONAERT 2006
147
10.12.2 Cas des systèmes mesurables. On appelle système mesurable un système linéaire pour lequel l’état est directement
accessible à la mesure. Dans ces conditions, on dispose bien de ( )tx à chaque instant.
Nous avons alors :
( ) ( ) ( )tyGtxKtu C⋅+⋅−= et ( ) ( ) ( )tuBtxA
dt
tdx ⋅+⋅= ,
ce qui donne :
( ) ( ) ( ) ( )tyGBtxKBAdt
tdx C⋅⋅+⋅⋅−= . (163)
En supposant que le système soit commandable, on sait par ailleurs qu’il existe une
matrice de gain K telle que les valeurs propres de ( )KBA ⋅− voir note puissent être « positionnées »
de façon arbitraire. Comme le système est par hypothèse commandable, nous pouvons le mettre
sous forme canonique de commandabilité. On pose alors ( ) ( )txTtxC ⋅= , où ( )txC correspond
au vecteur d’état associé à cette forme.
Soient { }nλλλλ ,...,,, 321 les valeurs propres voulues pour le système en boucle fermée. A ces
valeurs propres correspond donc le polynôme caractéristique
( ) ( ) nnnn
n
iiC cpcpcpppP ++⋅+⋅+=−= −−
=∏ ...2
21
11
λ .
Les équations d’état du système asservi sous sa forme commandable sont : ( ) ( ) ( ) ( ) ( ) ( ) ( )[ ] ( ) ( ) ( )tyGBtxKBAtxTKtyGBtxAtutBtxA
dt
tdx CCCCCCC
CCCCCCC
C ⋅⋅+⋅⋅−=⋅⋅−⋅⋅+⋅=⋅+⋅= −1
en ayant posé 1−⋅= TKKC
D’après les expressions liées à la forme canonique de commandabilité, nous avons :
[ ]CnCC
n
CCC kkk
aaa
KBA ....
0
:
:
0
1
010...0
...............
0...010
0...001
......
21
21
⋅
−
−−−
=⋅− , d’où
( ) ( ) ( )
+−+−+−
=⋅−
010...0
..............
0...010
0...001
.......2211 CnnCC
CCC
kakaka
KBA
On reconnaît la forme compagne associée à la matrice dont le polynôme caractéristique serait :
( ) ( ) ( ) ( )Cnnn
Cn
Cn kapkapkappP +++⋅++⋅++= −− .....2
221
11
Par conséquent, nous souhaitons avoir ( ) ( )pPpPC = , d’où :
voir note C’est à dire finalement les pôles de la fonction de transfert correspondante

ASSERVISSEMENTS DES SYSTEMES LINEAIRES INVARIANTS DANS LE TEMPS (S.L.I.T) EN TEMPS CONTINU – cours – J.BOONAERT 2006
148
−=
−=−=
nnnC
C
C
ack
ack
ack
....222
111
(164),
on obtient ensuite TKK C ⋅=
Pour trouver la matrice passage, il est possible de procéder de la façon suivante : Il faut écrire la matrice de commandabilité dans la base initiale, c’est à dire :
[ ]BABABABW n ⋅⋅⋅= −12 ,...,,,
Ensuite, il faut exprimer cette même matrice dans la base pour laquelle les équations d’état s’expriment sous forme canonique de commandabilité, c’est à dire :
[ ]CnCCCCCCC BABABABW ⋅⋅⋅= −12 ,...,,,
La matrice de passage recherchée est alors telle que WTWC ⋅= (ce qui, sous SCILAB se
résout en écrivant t=wc/w , encore faut-il l’avoir sous la main…). Si on ne dispose pas de SCILAB, il est possible de calculer cette matrice de passage en
utilisant l’algorithme de Leverrier :
Si nous notons T la matrice de passage, on peut l’écrire à l’aide de ses n colonnes { } njjt ≤≤1 , soit
[ ]nttT ....,,1= . On a par construction TATAC ⋅⋅= −1 et BTBC ⋅= −1 , ce qui revient à TAAT C ⋅=⋅ (a) et
BBT C=⋅ . Cette dernière expression permet d’écrire immédiatement que Btn= . L’expression des
autres colonnes de la matrice de passage peut être obtenues par récurrence à partir de (a). En effet, en développant cette équation, on a :
⋅=⋅−
⋅=⋅−
⋅=⋅−
⋅=⋅−
−−−
−−
10
211
122
11
.................
tAta
tAtat
tAtat
tAtat
n
n
nnnn
nnnn
, ce qui permet d’écrire :
{ } ( ) 1,1,...,2,1 +−−− ⋅⋅+=−∈∀ knknkn tIaAtnk (165)
donnant ainsi de façon itérative (sachant Btn= ) les colonnes de la matrice de passage. L’expression du gain G n’est en fait possible de façon simple que dans le cas d’un problème de
régulation (c’est à dire lorsque la consigne Cy est constante ou, en pratique, lentement variable au
regard de la dynamique du procédé, et ceci autour d’un point de fonctionnement donné). Dans ce cas, exprimons la fonction de transfert du système assujetti à la loi de commande par retour d’état :
ASSERVISSEMENTS DES SYSTEMES LINEAIRES INVARIANTS DANS LE TEMPS (S.L.I.T) EN TEMPS CONTINU – cours – J.BOONAERT 2006
149
( ) ( )( ) ( ) DGBKBAIpCpYpY
pH Cétatretour
BF +⋅⋅⋅+−⋅⋅== −1_
le gain statique du système correspond alors à : ( ) ( ) DGBAKBCpH étatretourBF
p+⋅⋅−⋅⋅= −
→
1_
0lim
Pour avoir un gain unitaire (garantissant que la sortie tende vers la consigne) pour le système assujetti à la commande par retour d’état, il suffira de prendre :
( )( ) BAKBC
DG⋅−⋅⋅
−= −1
1 (165-bis)
10.12.3 Choisir de « bons » pôles.
Il est très difficile de donner des réponses définitives à la question du choix des pôles pour le système corrigé par un retour d’état. Comme beaucoup de choses, ceci est affaire de compromis ! Nous sommes de prime abord tentés de prendre des pôles conférant le temps de réponse le plus court possible au système soumis au retour d’état, mais ceci se paye en matière de puissance : pour le procédé (par exemple un système de positionnement), à travail égal, la puissance à mobiliser sera d’autant plus grande que le temps imparti pour le faire sera court ! Le facteur limitant sera alors la puissance disponible au niveau de l’actionneur. D’un autre coté, il faudra bien que l’installation réponde à des performances suffisantes pour présenter un intérêt. Un autre point concerne la robustesse : le fait d’imposer à un système une dynamique très éloignée de son « comportement naturel » (c’est à dire sans loi de commande) , conduit en général à une grande sensibilité en matière de variation de paramètres qui se traduit par une forte dégradation des performances du système lorsque les conditions d’exploitation viennent à varier. Un « bon » choix de pôles doit donc réaliser un compromis entre :
- (1) performances (respect de contraintes minimales en matière de temps de réponse, d’amortissement, de précision statique, etc).
- (2) réalisme (la puissance exploitable est finie). - (3) Robustesse (on doit pouvoir bien tolérer des variations paramétriques découlant
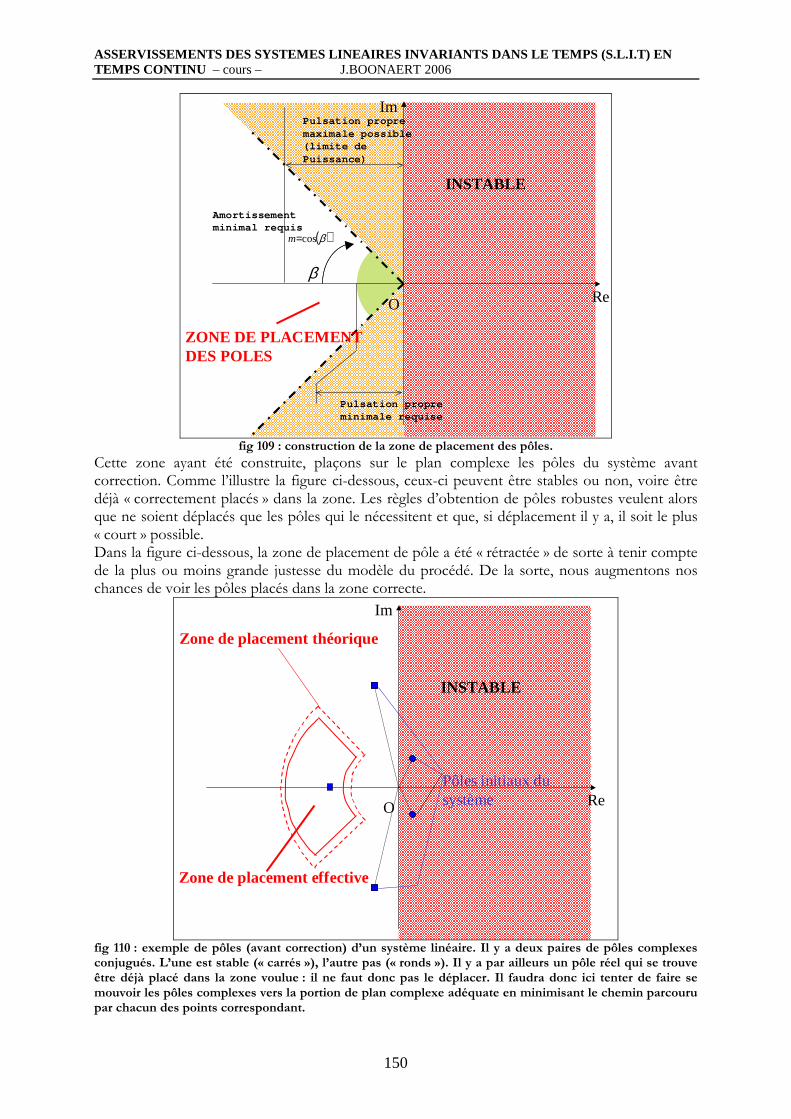
du domaine de fonctionnement retenu pour l’installation). Nous avons déjà abordé des considérations relatives au point (1) on interprétant géométriquement dans le plan complexe les notions de raideur et d’amortissement.. La figure 109 rappelle ainsi comment construire celle-ci à partir des contraintes imposées par les précisions statique et dynamique ainsi que par les contraintes de puissance disponible :
ASSERVISSEMENTS DES SYSTEMES LINEAIRES INVARIANTS DANS LE TEMPS (S.L.I.T) EN TEMPS CONTINU – cours – J.BOONAERT 2006
150
O Re
Im
INSTABLE
Amortissementminimal requis
( )βcos=m
β
Pulsation propreminimale requise
Pulsation propremaximale possible(limite de Puissance)
ZONE DE PLACEMENTDES POLES
fig 109 : construction de la zone de placement des pôles.
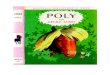
Cette zone ayant été construite, plaçons sur le plan complexe les pôles du système avant correction. Comme l’illustre la figure ci-dessous, ceux-ci peuvent être stables ou non, voire être déjà « correctement placés » dans la zone. Les règles d’obtention de pôles robustes veulent alors que ne soient déplacés que les pôles qui le nécessitent et que, si déplacement il y a, il soit le plus « court » possible. Dans la figure ci-dessous, la zone de placement de pôle a été « rétractée » de sorte à tenir compte de la plus ou moins grande justesse du modèle du procédé. De la sorte, nous augmentons nos chances de voir les pôles placés dans la zone correcte.
O Re
Im
INSTABLE
Zone de placement théorique
Zone de placement effective
Pôles initiaux du système
fig 110 : exemple de pôles (avant correction) d’un système linéaire. Il y a deux paires de pôles complexes conjugués. L’une est stable (« carrés »), l’autre pas (« ronds »). Il y a par ailleurs un pôle réel qui se trouve être déjà placé dans la zone voulue : il ne faut donc pas le déplacer. Il faudra donc ici tenter de faire se mouvoir les pôles complexes vers la portion de plan complexe adéquate en minimisant le chemin parcouru par chacun des points correspondant.
ASSERVISSEMENTS DES SYSTEMES LINEAIRES INVARIANTS DANS LE TEMPS (S.L.I.T) EN TEMPS CONTINU – cours – J.BOONAERT 2006
151
O Re
Im
INSTABLE
Zone de placement théorique
Zone de placement effective
Pôles initiaux du système
Pôles du systèmecorrigé
Déplacement du pôle
Déplacement du pôle
Dépl acement
du pôl e
Dépl acement
du pôl e
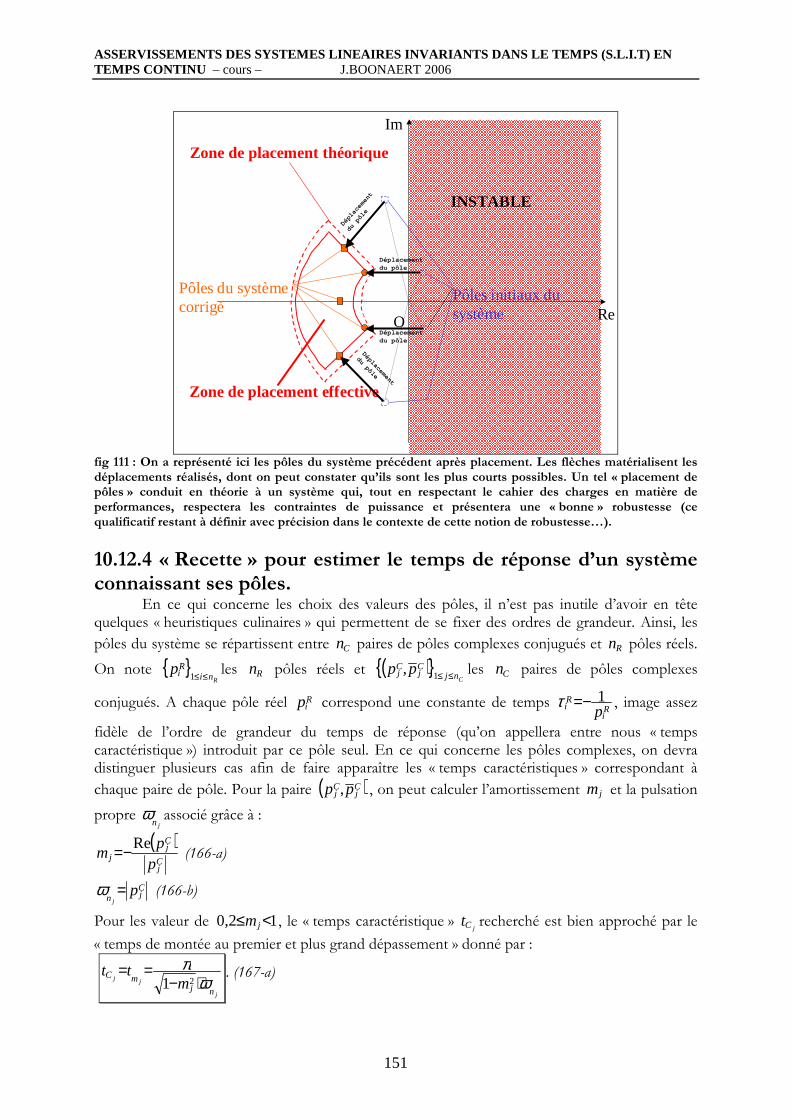
fig 111 : On a représenté ici les pôles du système précédent après placement. Les flèches matérialisent les déplacements réalisés, dont on peut constater qu’ils sont les plus courts possibles. Un tel « placement de pôles » conduit en théorie à un système qui, tout en respectant le cahier des charges en matière de performances, respectera les contraintes de puissance et présentera une « bonne » robustesse (ce qualificatif restant à définir avec précision dans le contexte de cette notion de robustesse…).
10.12.4 « Recette » pour estimer le temps de réponse d’un système connaissant ses pôles.
En ce qui concerne les choix des valeurs des pôles, il n’est pas inutile d’avoir en tête quelques « heuristiques culinaires » qui permettent de se fixer des ordres de grandeur. Ainsi, les
pôles du système se répartissent entre Cn paires de pôles complexes conjugués et Rn pôles réels.
On note { }Rni
Rip ≤≤1
les Rn pôles réels et ( ){ }Cnj
Cj
Cj pp ≤≤1, les Cn paires de pôles complexes
conjugués. A chaque pôle réel Rip correspond une constante de temps
Ri
Ri p
1−=τ , image assez
fidèle de l’ordre de grandeur du temps de réponse (qu’on appellera entre nous « temps caractéristique ») introduit par ce pôle seul. En ce qui concerne les pôles complexes, on devra distinguer plusieurs cas afin de faire apparaître les « temps caractéristiques » correspondant à
chaque paire de pôle. Pour la paire ( )Cj
Cj pp , , on peut calculer l’amortissement jm et la pulsation
propre jn
ω associé grâce à :
( )Cj
Cj
jpp
mRe−= (166-a)
Cjn
pj=ω (166-b)
Pour les valeur de 12,0 <≤ jm , le « temps caractéristique » jCt recherché est bien approché par le
« temps de montée au premier et plus grand dépassement » donné par :
j
jj
njmC
mtt
ωπ
⋅−==
21. (167-a)
ASSERVISSEMENTS DES SYSTEMES LINEAIRES INVARIANTS DANS LE TEMPS (S.L.I.T) EN TEMPS CONTINU – cours – J.BOONAERT 2006
152
Pour des valeurs inférieures à 2.0 , il faut prendre en compte le fait que la paire concernée va osciller longtemps avant d’être suffisamment amortie. On peut alors prendre dans ce cas :
j
j
njC
mt
ω11 ⋅
≈ . (167-b)
Pour un amortissement unitaire ( 1=jm ), on prendra pour « temps caractéristique » :
j
j
n
Ct ω1≈ . (167-c)
Pour les paires de pôles complexes « suramorties », on pourra prendre :
j
ji
n
jC mtω1⋅≈ (167-d)
qui permet de prendre en compte cette fois-ci le fait que la réponse mettra d’autant plus de temps à atteindre sa valeur finale que l’amortissement sera grand. Finalement, le temps de réponse global du système peut être estimé grâce à :
+
⋅≈ ∑∑
==
C
j
R n
jC
n
iRi
globalR t
pT
11
1η (168)
avec η un coefficient au moins égal à 3 (en pratique, 4=η ).
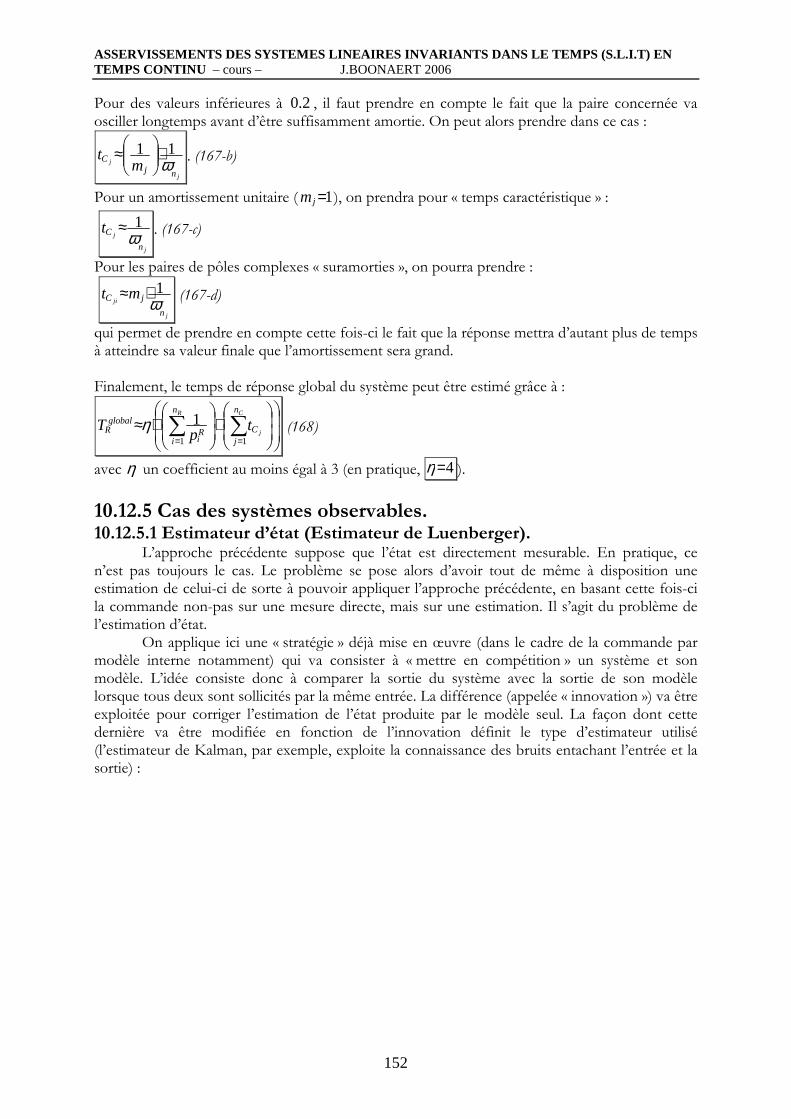
10.12.5 Cas des systèmes observables. 10.12.5.1 Estimateur d’état (Estimateur de Luenberger). L’approche précédente suppose que l’état est directement mesurable. En pratique, ce n’est pas toujours le cas. Le problème se pose alors d’avoir tout de même à disposition une estimation de celui-ci de sorte à pouvoir appliquer l’approche précédente, en basant cette fois-ci la commande non-pas sur une mesure directe, mais sur une estimation. Il s’agit du problème de l’estimation d’état. On applique ici une « stratégie » déjà mise en œuvre (dans le cadre de la commande par modèle interne notamment) qui va consister à « mettre en compétition » un système et son modèle. L’idée consiste donc à comparer la sortie du système avec la sortie de son modèle lorsque tous deux sont sollicités par la même entrée. La différence (appelée « innovation ») va être exploitée pour corriger l’estimation de l’état produite par le modèle seul. La façon dont cette dernière va être modifiée en fonction de l’innovation définit le type d’estimateur utilisé (l’estimateur de Kalman, par exemple, exploite la connaissance des bruits entachant l’entrée et la sortie) :
ASSERVISSEMENTS DES SYSTEMES LINEAIRES INVARIANTS DANS LE TEMPS (S.L.I.T) EN TEMPS CONTINU – cours – J.BOONAERT 2006
153
Système
Modèle du système
Mécanisme deMise à jour
Sortie réelle
Sortie modèle
état modèle
Estimation de l’état
entrée
fig 112 : principe général de l’estimation de l’état.
Dans notre cas, le vecteur d’état produit par le modèle va être modifié d’une quantité
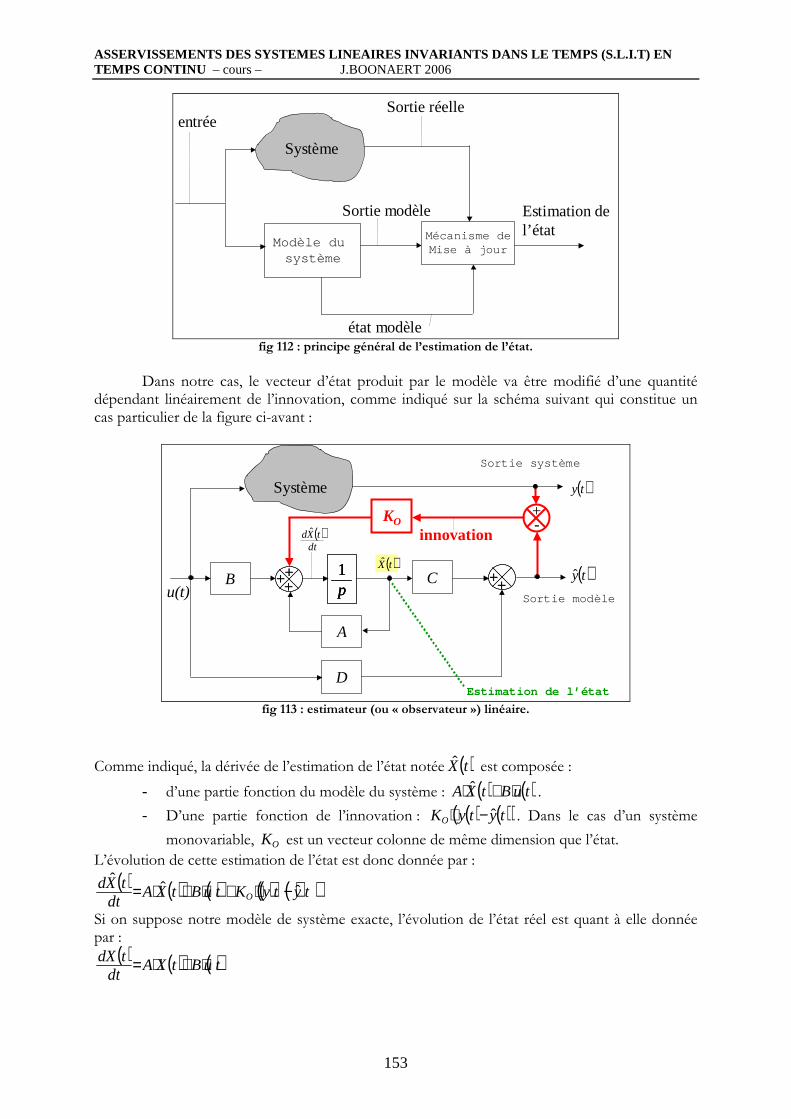
dépendant linéairement de l’innovation, comme indiqué sur la schéma suivant qui constitue un cas particulier de la figure ci-avant :
Système
A
B1p1p1p
C
D
++++++
++++
+-
innovationKO
u(t)
Sortie système
Sortie modèle
Estimation de l’état
( )dt
tXd ˆ
( )tX ( )ty
( )ty
fig 113 : estimateur (ou « observateur ») linéaire.
Comme indiqué, la dérivée de l’estimation de l’état notée ( )tX est composée :
- d’une partie fonction du modèle du système : ( ) ( )tuBtXA ⋅+⋅ ˆ .
- D’une partie fonction de l’innovation : ( ) ( )( )tytyKO ˆ−⋅ . Dans le cas d’un système
monovariable, OK est un vecteur colonne de même dimension que l’état.
L’évolution de cette estimation de l’état est donc donnée par :
( ) ( ) ( ) ( ) ( )( )tytyKtuBtXAdt
tXdO ˆˆˆ
−⋅+⋅+⋅=
Si on suppose notre modèle de système exacte, l’évolution de l’état réel est quant à elle donnée par :
( ) ( ) ( )tuBtXAdt
tdX ⋅+⋅=

ASSERVISSEMENTS DES SYSTEMES LINEAIRES INVARIANTS DANS LE TEMPS (S.L.I.T) EN TEMPS CONTINU – cours – J.BOONAERT 2006
154
Une question légitime est alors de savoir si l’estimation de l’état produite va converger vers l’état
véritable. Afin de tenter d’y répondre, désignons par ( )tE l’erreur d’estimation d’état. On a par
construction :
( ) ( ) ( )tXtXtE ˆ−=
L’évolution de l’erreur d’estimation d’état en fonction du temps est donnée par
( ) ( ) ( )dt
tXddt
tdXdt
tdE ˆ−= , soit en reprenant les expressions précédentes :
( ) ( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )( )tXtXCKtXtXAtytyKtuBtXAtuBtXAdt
tdEOO
ˆˆˆˆ −⋅⋅−−⋅=−⋅−⋅−⋅−⋅+⋅=
c’est à dire :
( ) ( ) ( ) ( )( ) ( ) ( ) ( )tECKAdt
tdEtXtXCKA
dttdE
OO ⋅⋅−=⇔−⋅⋅−= ˆ (166)
Nous voyons dans que la « dynamique » de l’évolution d’erreur d’estimation est fixée par les
valeurs propres de la matrice ( )CKA O⋅− . Celles-ci peuvent être imposées de façon parfaitement
arbitraire en appliquant la technique de placement de valeurs propres (dite « placement de pôles ») vue précédemment. Attention toutefois au point suivant : cette fois-ci, la matrice de gain de l’observateur n’est plus une ligne mais une colonne. Par conséquent, la technique précédente doit
être appliquée non-plus sur la paire { }BA, mais sur la paire { }TT CA , et le résultat obtenu (a priori
une ligne) doit ensuite être transposé. La question qui se pose immanquablement est celle du choix des pôles de l’observateur. A notre niveau, la seule contrainte qu’il faudra respecter de façon systématique sera de prendre des pôles d’observation plus rapides que ceux imposés pour le système. Un facteur 10 en matière de rapidité est un bon choix. Par ailleurs, on se contentera dans la plupart des cas de pôles d’observation réels afin de ne pas introduire de dynamique oscillante dans cette « mesure virtuelle ».
10.12.5.2 Commande par retour d’estimation d’état. Si le système à contrôler est à la fois commandable et observable, il est possible de mettre
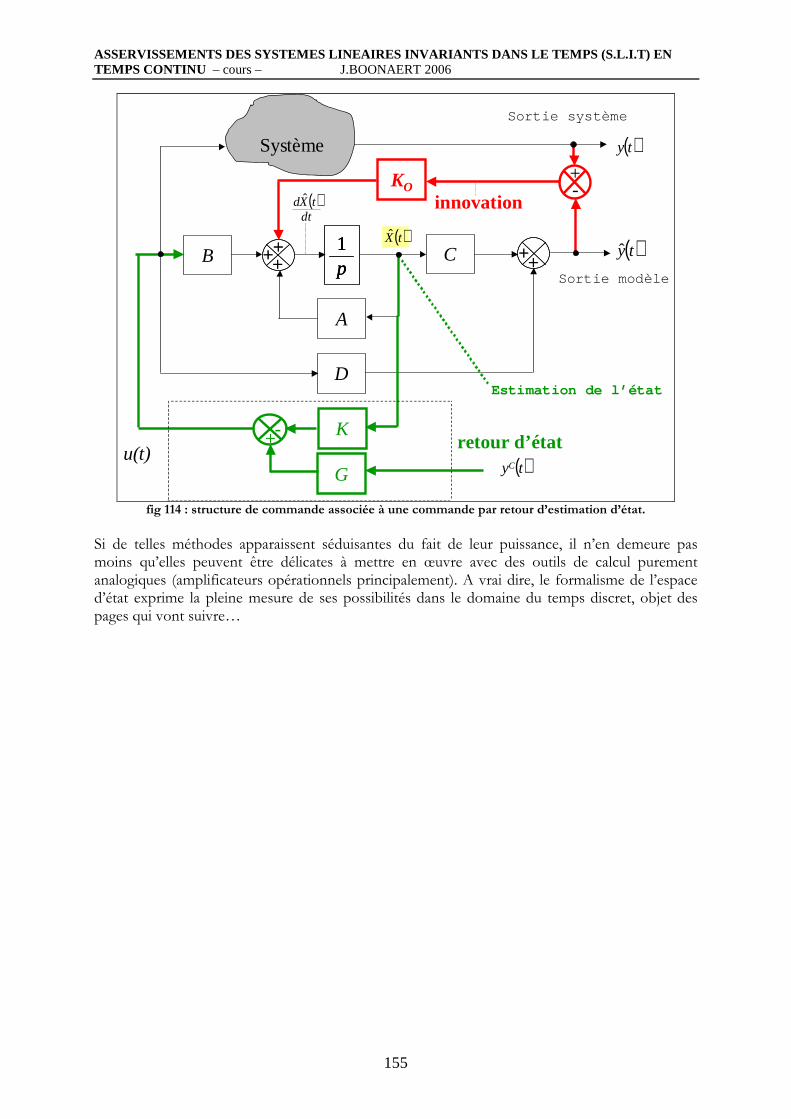
en œuvre une commande basé sur un retour d’état estimé. Lorsqu’une telle démarche est possible, les bénéfices économiques peuvent être importants car ceci permet en théorie de ne plus mesurer que la sortie du système tout en gardant le bénéfice des méthodes de placement de pôle. La figure suivante représente la structure de commande qui en découle : le régulateur proprement dit résulte de l’association d’un observateur d’état d’une part et d’un retour d’état d’autre part, celui-ci prenant en compte l’estimation fournie par l’observateur.
ASSERVISSEMENTS DES SYSTEMES LINEAIRES INVARIANTS DANS LE TEMPS (S.L.I.T) EN TEMPS CONTINU – cours – J.BOONAERT 2006
155
Système
A
B1p1p1p
C
D
++++++
++++
+-
innovationKO
u(t)
Sortie système
Sortie modèle
Estimation de l’état
( )dt
tXd ˆ
( )tX ( )ty
( )ty
K
G
-+
( )tyC
retour d’état
fig 114 : structure de commande associée à une commande par retour d’estimation d’état.
Si de telles méthodes apparaissent séduisantes du fait de leur puissance, il n’en demeure pas moins qu’elles peuvent être délicates à mettre en œuvre avec des outils de calcul purement analogiques (amplificateurs opérationnels principalement). A vrai dire, le formalisme de l’espace d’état exprime la pleine mesure de ses possibilités dans le domaine du temps discret, objet des pages qui vont suivre…