Embed Size (px)
Citation preview

Astigmatisme : analyses mathématiqueset représentations graphiques
Astigmatism: mathematical analysis and graphicalrepresentations
O. Touzeau (Praticien hospitalier, ancien chef de clinique-assistant) *,S. Scheer (Assistante), C. Allouch (Chef de clinique-assistante),V. Borderie (Professeur des Universités, praticien hospitalier),L. Laroche (Professeur des Universités,praticien hospitalier, chef de service)
Service d’ophtalmologie, hôpital Saint-Antoine, 184, rue du Faubourg-Saint-Antoine,75571 Paris cedex 12, France
MOTS CLÉSAstigmatisme ;Cylindre ;Axe ;Analyse ;Graphique
Résumé L’astigmatisme est souvent réduit à un cylindre orienté selon un axe. Cetteexpression « polaire » de l’astigmatisme régulier (cylindre et axe) rend difficile lesanalyses. Les difficultés sont dues au caractère directionnel des données (axe), au cyclenon trigonométrique de l’astigmatisme (180°) et à l’ambiguïté liée au choix du signe ducylindre (positif ou négatif). Les coordonnées cartésiennes, les vecteurs, les fonctionssinusoïdales, les matrices et les nombres complexes sont des outils mathématiquesintéressants pour exprimer ou représenter graphiquement l’astigmatisme. Ces expres-sions « non polaires » utilisent des fonctions trigonométriques qui nécessitent de procéderà un doublement de l’axe. Le cylindre croisé de Jackson est souvent employé, car cetteécriture décrit uniquement l’astigmatisme sans la composante sphérique de l’amétropie(équivalent sphérique nul). L’utilisation des coordonnées cartésiennes du cylindre croiséde Jackson permet la disparition du caractère directionnel des données. Ceci revient àdécomposer le cylindre croisé de Jackson en deux cylindres croisés de Jackson d’axe0°/90° et d’axe 45°/135° représentant respectivement la composante directe/indirectede l’astigmatisme et la composante oblique de l’astigmatisme. Ces deux composantespeuvent définir un plan de l’astigmatisme. Les expressions « non polaires » permettent decalculer l’astigmatisme moyen, une variation d’astigmatisme et d’autres analyses com-plexes (énantiomorphisme, ...) qui seraient difficiles avec la seule écriture polaire del’astigmatisme.© 2004 Elsevier SAS. Tous droits réservés.
* Auteur correspondant.Adresse e-mail : [email protected] (O. Touzeau).
EMC-Ophtalmologie 1 (2004) 117–174
www.elsevier.com/locate/emcop
© 2004 Elsevier SAS. Tous droits réservés.doi: 10.1016/j.emcop.2004.02.002

KEYWORDSAstigmatism;Cylinder;Axis;Analysis;Graphic
Abstract Astigmatism is often reduced to a 1-axis orientated cylinder. This “polar”expression of the astigmatism (cylinder, axis) makes analyses difficult due to thedirectional value (axis), the non-trigonometric cycle of astigmatism (180°) and theambiguity related to the cylinder sign (positive or negative). Rectangular coordinates,vectors, sinusoidal functions, matrix and complex numbers are mathematic tools thatmay be useful for the expression of astigmatism or its graphical representation. These“non-polar” expressions use trigonometric functions witch require doubling the axis. TheJackson cross cylinder is often used because it describes only the astigmatism without thespherical component of ametropia (spherical equivalent zero). The Jackson cross cylinderis expressed in rectangular coordinates to avoid the directional property of the data. Bothrectangular coordinates correspond to two Jackson cross cylinders with the followingaxis : 0 /90° and 45 /135°. These represent a decomposition of astigmatism in twocomponents : orthoastigmatism and oblique astigmatism. Both components can define a“dioptric” plane of the astigmatism. The “no-polar” expressions are useful for calculatingthe mean astigmatism, the change in astigmatism, and other complex analyses (i.e.,enantiomorphism...) which would be difficult with the sole polar expression.© 2004 Elsevier SAS. Tous droits réservés.
Définition de l’astigmatisme
La focalisation d’un point objet en un point imageunique correspond à une situation optique idéale.Un système optique parfait qui remplit cette condi-tion est qualifié de « stigmate » en optique géomé-trique8,34 (Fig. 1). Étymologiquement, l’astigma-tisme désigne la perte du caractère ponctuel del’image (« a » : privatif et stigma : le point en grec).Plusieurs causes peuvent être à l’origine du ca-
ractère non ponctuel de l’image : l’irrégularité depuissance du dioptre (géométrie irrégulière, indicede réfraction variable, ...), l’obliquité des rayonslumineux par rapport à l’axe géométrique du diop-tre, un décentrement du dioptre, ...Malgré une ancienneté de plus de deux siècles,
l’astigmatisme est un concept dont la significationvarie selon les utilisateurs.19 Pour les cliniciens,l’astigmatisme représente avant tout une variétéd’amétropie caractérisée par la défocalisation del’image en deux méridiens principaux orthogonaux.Cette amétropie est le plus souvent générée par lagéométrie torique de la cornée et en particulier desa face antérieure. Les cliniciens s’intéressent prin-cipalement à l’astigmatisme régulier, c’est-à-direoptiquement corrigible par un verre de lunettes.L’objectif est ici de trouver le verre adéquat capa-ble de compenser l’astigmatisme. L’astigmatisme
est donc dans ce cas exprimé de façon simple par uncylindre orienté selon une direction précise. Pourles physiciens, la notion d’astigmatisme est pluslarge puisqu’elle représente la composante nonsphérique d’une puissance réfractive, d’où une ex-pression mathématique plus complexe.18
Généralités sur l’astigmatisme régulier
L’astigmatisme peut avoir une origine purementoptique et être lié à l’inclinaison des rayons lumi-neux quelle que soit la géométrie du dioptre (Fig.2A). Cet astigmatisme « oblique » (oblique astigma-tism ou astigmatism aberration) est une aberrationoptique qui peut s’observer dans tous les systèmesoptiques.19 L’astigmatisme « axial » (toric astigma-tism) qui intéresse les cliniciens a une origine géo-métrique (Fig. 2B). L’astigmatisme est alors géné-ralement lié à une irrégularité de la surface dudioptre.
Conoïde de Sturm
Dans le cas de l’astigmatisme régulier, un pointobjet ne donne pas une image ponctuelle mais seréfracte en un faisceau lumineux de géométrieparticulière appelée « conoïde de Sturm »(Fig. 3).8,34,61 Selon la position de l’écran dans leconoïde, la forme de l’image est variable (droite,ellipse ou cercle). Aux deux extrémités du conoïde,l’image se focalise en deux droites orthogonales quicorrespondent aux deux méridiens les plus et moinsréfringents. Entre ces deux focales particulières, laforme de l’image va varier entre deux ellipses degrand axe orthogonal, en passant par un cercle ditde moindre diffusion. Le cercle de moindre diffu-
Figure 1 Système optique stigmate. Tous les rayons lumineuxissus du point objet A convergent en un même point image A’. Lepoint A et le point A’ sont conjugués.
118 O. Touzeau et al.

sion correspond à une situation particulière pourlaquelle la réfraction est identique quel que soit leméridien.8,61 Un conoïde de Sturm est égalementobservé en cas d’astigmatisme « oblique ».
Dioptre torique
Un dioptre qui possède une géométrie torique gé-nère un astigmatisme régulier. Un tore est unesurface qui ne possède pas de symétrie rotation-nelle. Une surface torique est obtenue par la rota-tion d’un cercle (ou d’un arc) autour d’un axe quine passe pas par le centre du cercle (Fig. 4). Unesurface torique possède deux principaux rayons de
courbure orthogonaux : le rayon de révolution et lerayon qui a généré le cercle (ou l’arc) (Fig. 4, 5). Undioptre torique possède deux plans méridionauxprincipaux orthogonaux passant par l’axe optiqueet contenant la courbure minimale ou maximale.34
À chacune de ces courbures extrêmes correspondl’une des deux droites focales du conoïde de Sturm.La droite focale et la courbure qui l’a générée sontorthogonales. Dans le cas d’un dioptre toriqueconvergent, le méridien le plus bombé correspond àla droite focale antérieure, tandis que le méridienle plus plat correspond à la droite focale posté-rieure. Entre ces deux valeurs extrêmes, le rayonde courbure varie régulièrement d’un méridien à
Figure 2 Astigmatisme « oblique » et astigmatisme « axial ».A. Astigmatisme « oblique » ou aberration d’astigmatisme d’une lentille sphérique. Cette aberration optique est liée à l’obliquité desfaisceaux lumineux issus d’un point objet situé en dehors de l’axe optique. L’image n’est plus ponctuelle mais les rayons convergenten deux droites focales orthogonales.B. Astigmatisme « axial » ou astigmatisme torique. Le point objet est situé sur l’axe optique. La focalisation de l’image en deux droitesfocales orthogonales est liée ici à la géométrie du dioptre (torique). Il s’agit de l’amétropie qui intéresse les cliniciens. L’astigmatismeest de type inverse (ou indirect) ici.
119Astigmatisme : analyses mathématiques et représentations graphiques

l’autre et provoque une focalisation des faisceauxle long du conoïde de Sturm.
Relation entre la géométrie d’un dioptretorique et sa puissance réfractive
L’astigmatisme régulier peut être analysé sousdeux aspects indissociables : géométrique ou opti-que. L’aspect géométrique de l’astigmatisme régu-lier est la variation de courbure du dioptre selon leméridien, alors que sa traduction optique est lavariation de puissance réfractive. La courbure dudioptre et sa puissance réfractive varient toutesdeux régulièrement d’un méridien à un autre entre
Figure 3 Le conoïde de Sturm. Dans l’astigmatisme régulier, l’image n’est pas ponctuelle mais se réfracte en formant une figuregéométrique particulière appelée conoïde de Sturm. Deux droites focales perpendiculaires sont situées aux deux extrémités duconoïde. Chacune de ces deux droites focales correspond à l’une des deux courbures principales situées orthogonalement. Entre cesdeux droites, le faisceau lumineux va prendre la forme d’une ellipse d’axe variable en passant par un cercle dit de moindre diffusion.Ce point particulier correspond à une réfraction identique quel que soit le méridien.
Figure 4 Construction d’une surface torique. Une surface tori-que est générée par la rotation d’un cercle (ou d’un arc decercle) autour d’un axe. La surface torique possède deux cour-bures principales orthogonales de rayon rV et rH.
Figure 5 Exemples d’objet ayant une surface torique.A. Images de synthèse. Il existe différentes surfaces toriquesselon la géométrie (convexe ou concave) des deux courburesprincipales et les dimensions respectives de leurs rayons decourbure.B. Photographie d’une cuillère. La surface convexe d’unecuillère représente un exemple de toricité analogue à celle de lacornée (deux courbures principales orthogonales). Il s’agirait icid’un astigmatisme régulier indirect (ou inverse).
120 O. Touzeau et al.

deux valeurs extrêmes correspondant aux deux mé-ridiens principaux orthogonaux.Une relation simple lie le rayon de courbure du
dioptre, sa puissance réfractive et les indices deréfraction des deux milieux. La puissance et lerayon de courbure évoluent de façon inversementproportionnelle (Fig. 6) :61
Puissance (D) =D Indice de réfraction
Rayon de courbure (mm)
(relation des dioptres sphériques)
Cette relation est établie à partir des lois de laréfraction, en particulier la deuxième loi de Des-cartes (n1 × sin i1 = n2 × sin i2) et de l’approximationdes petits angles. Cette approximation consiste àconfondre les angles, leur sinus et leur tangentequand les rayons incidents et réfractés sont peuinclinés, c’est-à-dire proches de l’axe optique (hy-pothèse para-axiale ou conditions de Gauss). Lalinéarisation de l’optique géométrique permise parl’approximation « sin a ≈ a » simplifie la deuxièmeloi de Descartes « n1 × i1 = n2 × i2 » (loi de Ke-pler).34,61
La relation des dioptres sphériques qui permetde convertir le rayon de courbure en puissance (etinversement) n’est rigoureusement exacte qu’au
centre, et n’est plus valable quand on s’éloignetrop de l’axe optique. L’existence en périphérie dudioptre d’aberrations géométriques (en particulierl’aberration de sphéricité) rend la correspondanceentre courbure et puissance moins forte.34,61
Quantification de l’astigmatisme régulier
Mesure géométriqueL’astigmatisme peut être quantifié par une mesuregéométrique ou une mesure optique. Compte tenude l’importance de la différence des indices deréfraction entre l’air et la cornée, le dioptre cor-néen antérieur joue un rôle majeur dans la puis-sance réfractive de l’œil et par conséquent dans lagenèse de l’astigmatisme. L’astigmatisme de l’œilest généralement la conséquence de la toricité dela face antérieure de la cornée. De plus, du fait desa situation superficielle, le dioptre cornéen anté-rieur est facilement accessible à la mesure. L’ana-lyse et la quantification de l’astigmatisme à partirde la morphologie de la face antérieure de la cor-née sont très anciennes.8,27 La kératométrie ana-lyse quatre points paracentraux de la surface anté-rieure de la cornée selon une conceptionsphérocylindrique (Fig. 7). Les deux rayons de cour-bure principaux sont transformés en puissance àl’aide de la relation des dioptres sphériques. Afinde prendre en compte le rôle de la face postérieurede la cornée, ce n’est pas la différence des indicesde réfraction de l’interface film lacrymal/air quiest utilisée, mais un indice kératométrique(1,3375). La soustraction de deux puissances desdeux méridiens principaux indique l’amplitude del’astigmatisme régulier de la cornée (Fig. 7).
Mesure optiqueLa mesure optique de l’astigmatisme consiste àadditionner des verres de puissance connue de fa-çon à compenser l’astigmatisme. La méthode peutêtre manuelle et subjective (réfraction subjective)ou automatisée et objective (autoréfractomètre).La mesure optique de l’astigmatisme nécessite l’in-terposition d’un verre de géométrie torique devantl’œil. L’idéal serait de disposer d’un verre dont lesdeux rayons de courbure principaux seraient adé-quats, pour permettre la focalisation des imagesdes deux méridiens principaux sur la rétine. Lenombre limité de verre torique d’essai impose unobjectif plus modeste. L’une des droites focalespeut être ramenée sur l’autre de façon à obtenirune image ponctuelle. Ceci consiste à transformerun système astigmate en un système stigmate.L’éventuelle composante sphérique de l’amétropie(hypermétropie ou myopie) peut être compenséepar l’addition d’un verre sphérique (convexe ou
Figure 6 Relation des dioptres sphériques. La deuxième loi deDescartes établit une relation entre les angles du rayon incident(a1), l’angle du rayon réfléchi (a2) et les indices de réfraction (n1et n2). À proximité de l’axe géométrique, les deux angles sontpetits et voisins de leurs sinus (approximation des petits angles).Ces deux relations permettent d’établir la formule des dioptressphériques qui lie la puissance du dioptre (P), son rayon decourbure (R) et les indices de réfraction des deux milieux (n1 etn2). P = (n2 - n1) / R. La formule des dioptres sphériques quipermet de convertir le rayon de courbure en puissance n’estvalable que dans les conditions para-axiales.
121Astigmatisme : analyses mathématiques et représentations graphiques

concave). Les seuls verres d’essai toriques disponi-bles sont des verres cylindriques (convexe ouconcave). Le cylindre est la plus simple des géomé-tries toriques. L’un des deux rayons de courbureprincipale du cylindre est égal à l’infini (linéaire),c’est-à-dire que sa puissance est nulle (Fig. 8).Optiquement, le verre cylindrique est un dioptretorique qui n’exerce son action que sur l’une desdeux droites focales principales (parallèle à l’axedu cylindre).61 L’autre droite focale principale (or-thogonale à l’axe du cylindre) n’est pas influencéepar la présence du verre cylindrique (Fig. 9).
Différentes expressionsde l’astigmatisme
Expression polaire
GénéralitésL’expression polaire « (cylindre) × axe » est laméthode la plus simple et la plus pratique pour
Figure 7 Mesure de l’astigmatisme cornéen par la kératométrie. La kératométrie mesure les deux rayons des deux courburesprincipales (minimale et maximale) de la face antérieure de la cornée à partir de la projection de deux mires dans la zoneparacentrale. Les rayons de courbure sont convertis en puissance par la relation des dioptres sphériques. Afin de prendre en comptela participation de la face postérieure de la cornée, ce n’est pas l’indice de réfraction du film lacrymal qui est utilisé mais un indicekératométrique égal à 1,3375. La différence entre les deux puissances principales donne l’amplitude de l’astigmatisme cornéen.
Figure 8 Description d’un verre cylindrique. Le verre plan-cylindrique est le plus simple des dioptres toriques, car il nepossède qu’un rayon de courbure principal. L’autre rayon decourbure principal est égal à l’infini (linéaire), c’est-à-dire quesa puissance est nulle. L’action optique est nulle dans l’axe ducylindre et est maximale dans l’axe orthogonal (contraxe). Lecylindre est ici convexe et convergent (puissance positive). Lafocale est perpendiculaire au méridien de courbure.
Figure 9 Action optique des cylindres sur les droites focalesprincipales.A. Un cylindre convexe (puissance positive) a une action conver-gente sur la focale parallèle à l’axe du cylindre. La focalepostérieure avance vers la focale antérieure.B. Un cylindre concave (puissance négative) a une action diver-gente sur la focale parallèle à l’axe du cylindre. La focaleantérieure recule vers la focale postérieure.
122 O. Touzeau et al.

décrire l’astigmatisme. Universellement utilisée,l’expression polaire de l’astigmatisme découle di-rectement des règles de prescription des verres delunettes. L’écriture polaire de l’astigmatismeconsiste à décrire à l’aide de données directionnel-les et quantitatives le verre cylindrique adéquatcapable de compenser l’astigmatisme (Fig. 10).Trois paramètres sont suffisants pour définir parfai-tement l’astigmatisme régulier, c’est-à-dire les ca-ractéristiques du verre :
• une donnée quantitative algébrique. Le cylin-dre indique la puissance du verre (le cylindre)tandis que le signe décrit l’action optique et lagéométrie du verre : divergent (puissance né-gative) et concave ou convergent (puissancepositive), et convexe ;
• une donnée qualitative pour décrire l’orienta-tion du verre : l’« axe ». Par convention, l’axede l’astigmatisme est défini par l’angle formépar l’un des deux méridiens principaux et l’ho-rizontale.La description simultanée de la composante
sphérique de l’amétropie nécessite de rajouter unedonnée quantitative algébrique indiquant la puis-sance de la sphère et son type : hypermétrope(verre positif, convexe ou convergent) ou myope(verre négatif, divergent ou concave). On obtientdonc un sphérocylindre : sphère, (cylindre) × axe.
Quatre expressions polairesLa correction d’une amétropie sphérocylindriquequelconque peut être envisagée de quatre maniè-res différentes :
• cylindre convergent (+) et une sphère : le cylin-dre positif avance la droite focale postérieuresur la droite focale antérieure, tandis que lasphère repositionne l’ensemble sur la rétine ;
• cylindre divergent (-) et une sphère : le cylin-dre négatif recule la droite focale antérieuresur la droite focale postérieure, tandis que lasphère repositionne le tout sur la rétine ;
• deux cylindres : les deux droites focales sontdirectement repositionnées sur la rétine parl’utilisation de deux cylindres (de signe varia-ble selon les cas). Cette expression en doublecylindre ne nécessite pas l’utilisation complé-mentaire d’une sphère ;
• cylindre croisé de Jackson et une sphère :l’astigmatisme est corrigé par un cylindrecroisé de Jackson. Une sphère corrige l’amé-tropie sphérique résiduelle.En utilisant l’expression polaire, un même sphé-
rocylindre peut s’écrire de quatre façons différen-tes, comme le montre l’exemple suivant (Fig. 11) :
• « cylindre positif » : +0,5 (+2) × 0° ;• « cylindre négatif » : +2,5 (–2) × 90° ;• « double cylindre » : (+2,5) × 0° et (+0,5)× 90° ;
• « cylindre croisé de Jackson » : +1,5 et (–1)× 90° / (+1) × 0°.Bien que ces différentes écritures du sphérocy-
lindre soient optiquement équivalentes, une desformes permet parfois de mieux visualiser, un as-pect de l’astigmatisme auquel on s’intéresse. Ainsi,avec l’expression en cylindre positif, l’axe de l’as-tigmatisme a l’avantage de correspondre à l’axe dusablier des cartes de courbure (axiale ou tangen-tielle) des topographes Placido, du moins pour lesasphéricités physiologiques (prolate).5,69 Les résul-tats des topographies cornéennes (Placido, Orbs-can®) sont le plus souvent exprimés en cylindrepositif. L’expression en cylindre positif est particu-lièrement intéressante pour la chirurgie « re-laxante » de l’astigmatisme. En cas de chirurgieincisionnelle (incisions arciformes ou T-cuts), lesincisions doivent être réalisées dans l’axe du cylin-dre positif (méridien le plus bombé ou sablier decouleur chaude) (Fig. 12A).Au contraire, pour les asphéricités de type
oblate, l’axe du sablier de couleur froide des cartesde courbure des topographes Placido correspond àl’axe de l’expression en cylindre négatif. L’asphé-ricité oblate est peu fréquente, en dehors de lachirurgie de la myopie et de cas particulier (greffede cornée après ablation des sutures, ...)(Fig. 12B). Les cartes d’élévation antérieure (Orb-scan®) présentent généralement des couleurs in-versées par rapport aux cartes de courbure « Pla-cido » (Fig. 13).69
Figure 10 Coordonnées polaires et cartésiennes. Dans un plan,la position du point A par rapport à l’origine est parfaitementdéfinie à l’aide de deux paramètres dans un système cartésienou un système polaire. Les coordonnées cartésiennes ou rectan-gulaires (x, y) sont obtenues par projection du point A sur lesaxes des abscisses et des ordonnées. Les coordonnées polairessont composées d’un paramètre quantitatif (la distance entre lepoint A et l’origine) et d’un paramètre qualitatif directionnel(l’angle entre OA et l’axe de référence OX). Les coordonnéespolaires et cartésiennes sont reliées entre elles par des relationsgéométriques (Pythagore) et trigonométriques.
123Astigmatisme : analyses mathématiques et représentations graphiques

Les deux écritures du sphérocylindre en « cylin-dre positif » et « cylindre négatif » peuvent facile-ment se transposer l’une en l’autre. La transposi-tion cylindrique s’écrit :
• sphère → sphère + cylindre ;• cylindre → - cylindre ;• axe → axe ± 90°.
Bien qu’elle soit universellement utilisée pourdécrire la réfraction au niveau individuel, l’expres-sion du sphérocylindre en sphère, axe et cylindre(positif ou négatif) est ambiguë.40,60 En effet, cha-cun des termes de l’expression perd sa significationquand il est dissocié des autres. Ainsi, la compo-sante sphérique peut avoir une puissance égale à la« sphère » ou à la « sphère + cylindre », tandis quele cylindre peut signifier « + cylindre » ou « - cylin-dre ». De même, l’axe peut être égal à l’axe « a »ou à l’axe orthogonal « a ± 90° ».
Les deux autres expressions de la réfraction(« double cylindre » et « cylindre croisé de Jack-son ») sont exceptionnellement utilisées en prati-que courante. L’expression en « double cylindre » a
l’avantage de décrire exactement le changementde chaque méridien. Cette écriture est donc inté-ressante pour la chirurgie cornéenne. L’écriture en« double cylindre » permet d’apprécier l’effet decouple (aplatissement d’un méridien associé à unbombement du méridien orthogonal et vice versa)dans une chirurgie de l’astigmatisme. Afin de mieuxanalyser les modifications cornéennes responsablesdes changements réfractifs, certains auteurs (Hol-laday, Naeser ...) préfèrent exprimer l’axe de l’as-tigmatisme non pas de façon conventionnelle parl’axe du cylindre, mais par l’axe orthogonal c’est-à-dire le contraxe.22,24,41,44 En effet, la puissancedu cylindre est nulle dans la direction de l’axe duverre (a) et maximale dans le contraxe (a + 90°)(Fig. 8, 9). Les axes de l’astigmatisme exprimés ennotion conventionnelle (axis notation) désignée par« × » et en notation de puissance (power notation)désignée par « @ » diffèrent de 90°.Exemple : +1 × 90° → +1 @ 0°L’astigmatisme peut également être exprimé à
l’aide d’un cylindre croisé de Jackson. Le cylindrecroisé de Jackson est une combinaison de deux
Figure 11 Différentes expressions polaires de la réfraction (exemple).A. Formulation en cylindre positif.B. Formulation en cylindre négatif.C. Formulation en « double cylindre ». Les deux cylindres permettent la focalisation des deux droites focales principales sur la rétinesans utilisation de sphère. Les deux cylindres peuvent être de puissance différente et avoir le même signe.D. Formulation en cylindre de Jackson. Les deux cylindres ont la même puissance et sont de signes opposés. Les deux focalesconvergent l’une vers l’autre en parcourant chacune la moitié du chemin. Le cylindre croisé a une puissance égale à la moitié de lapuissance du cylindre des formulations en « cylindre positif » ou « cylindre négatif ». L’utilisation d’une sphère permet de focaliserles deux droites focales sur la rétine.
124 O. Touzeau et al.

cylindres de puissance opposée placés de façonorthogonale (Fig.14A, B). L’écriture d’un cylindrecroisé de Jackson est dans le cas général :
(+cyl) × axe / (–cyl) × axe ± 90°
Concrètement, le cylindre croisé de Jackson dé-place les deux droites focales d’une même ampli-tude mais en sens opposé (Fig. 14B). Pour quel’astigmatisme soit parfaitement compensé par lecylindre croisé de Jackson, il faut prendre unepuissance égale à la moitié du cylindre des expres-sions conventionnelles en cylindre positif ou cylin-dre négatif.
Cylindre croisé de Jackson : (+cyl/2) × axe /(–cyl/2) × axe ± 90°
Concrètement, la droite focale antérieure vareculer d’une distance qui est égale à l’avancée dela droite focale postérieure. En utilisant un cylindrede Jackson d’une puissance « ±cylindre/2 », lesdeux droites focales vont se rejoindre (Fig. 11D,14B). Il faut également que les deux axes du cylin-dre croisé de Jackson correspondent aux deux axesprincipaux de l’astigmatisme. La seule action ducylindre croisé de Jackson est un déplacement sy-métrique et opposé des deux droites focales, per-
mettant éventuellement la fusion de ces dernières.Contrairement à la forme en double cylindre, lecylindre croisé de Jackson ne permet pas aux deuxdroites focales de se positionner sur la rétine, saufdans le cas d’un astigmatisme parfaitement mixte(rétine située à égale distance des deux droitesfocales). Dans ce cas, les expressions en « doublecylindre » et en « cylindre croisé de Jackson » sontidentiques.Le cylindre croisé de Jackson possède un équiva-
lent sphérique nul car les deux cylindres qui lecomposent sont orthogonaux et de puissance oppo-sée. Le cylindre croisé de Jackson corrige doncuniquement l’astigmatisme et n’a pas d’influencesur l’amétropie sphérique. Ce fait explique l’inté-rêt de l’utilisation d’un cylindre croisé de Jacksonpour affiner la détermination de l’astigmatismesubjectif. Des cylindres croisés de Jackson de puis-sance ± 0,25 D ou ± 0,50 D sont utilisés. Puisque lecylindre croisé de Jackson n’exprime que l’astig-matisme, il faut ajouter un autre terme pour dé-crire l’éventuelle amétropie sphérique. La puis-sance réfractive d’un système optique peut êtredécomposée en deux parties : une composantesphérique (stigmate power) et une composante as-tigmate (astigmatism power).18,19
Figure 12 Relation entre l’axe du cylindre et l’aspect des cartes de courbure des topographies Placido.A. Astigmatisme direct avec une asphéricité physiologique (prolate). Dans la formulation en cylindre positif, l’axe du cylindre al’avantage de correspondre à l’axe des sabliers des cartes de courbure (axiale et tangentielle) dans le cas d’une asphéricitéphysiologique. L’action d’une chirurgie réfractive « relaxante » doit être effectuée dans le méridien bombé, c’est-à-dire dans l’axedu cylindre positif.B. Astigmatisme avec une asphéricité de type oblate. Cette asphéricité est rare en dehors de cas particuliers (chirurgie de lamyopie...). En cas d’asphéricité oblate, l’axe du cylindre négatif correspond à l’axe du sablier des cartes de courbure. Les chirurgiesréfractives qui ont pour action le bombement d’un méridien (résection cunéiforme, sutures de compression, ...) doivent êtrepratiquées dans l’axe du cylindre négatif.
125Astigmatisme : analyses mathématiques et représentations graphiques

Puissance totale = puissance sphérique +astigmatisme
La puissance totale est exprimée par un sphéro-cylindre, tandis que l’astigmatisme est décrit parun cylindre croisé de Jackson.Puissance sphérique :• = puissance totale – astigmatisme• = sphérocylindre – cylindre croisé de Jackson• = sph (Cyl) × axe – [(+ Cyl/2) × axe / (– Cyl/2)(axe ± 90°)]
• = sph (+ Cyl/2) × axe + (+ Cyl/2) × axe ± 90°• = sph + Cyl/2• = équivalent sphériquePuissance totale = équi-valent sphérique + cylindre croisé de Jackson
Un sphérocylindre peut donc être décomposé enune sphère égale à l’équivalent sphérique et en uncylindre croisé de Jackson. Cette écriture est trèsintéressante pour plusieurs raisons. Contrairementà un cylindre, le cylindre croisé de Jackson n’aaucune influence sur la composante sphérique(équivalent sphérique nul) (Fig. 14B). Autrementdit, l’addition d’un cylindre croisé de Jackson à unelentille sphérique ne modifie pas l’équivalent sphé-rique du système. Avec cette écriture, le sphérocy-lindre peut donc être séparé en deux composantesindépendantes : une composante sphérique pureégale à l’équivalent sphérique et une composante
Figure 13 Relation entre l’axe du cylindre et l’aspect des cartesd’élévation antérieure (Orbscan®).A. Situation des deux méridiens principaux d’une cornée toriquepar rapport à la sphère de référence. Le codage colorimétrique descartes d’élévation est défini de façon relative par rapport à unesphère de référence (vert : au niveau de la surface de la sphère ;couleurs chaudes : au-dessus ; couleurs froides : au-dessous).B. Aspect d’une carte d’élévation antérieure d’un astigmatismedirect. La carte d’élévation des cornées toriques prend volon-tiers un aspect de selle car les deux méridiens principaux sontrespectivement situés au-dessus et au-dessous de la sphère deréférence. Les cartes d’élévation présentent des couleurs inver-sées par rapport aux cartes de courbure de la topographiePlacido, et l’axe de l’astigmatisme est moins bien visualisé.
Figure 14 Cylindre croisé de Jackson.A. Description du cylindre croisé de Jackson. Un cylindre croiséde Jackson est composé de deux cylindres de même puissancemais de signe opposé placés de façon orthogonale. Un descylindres est divergent (-) alors que l’autre est convergent (+).Bien que seuls les cylindres croisés de Jackson de ± 0,25 D ou ±0,50 D soient disponibles, le concept du cylindre croisé deJackson est intéressant pour analyser l’astigmatisme.B. Action optique d’un cylindre croisé de Jackson. Un cylindrecroisé de Jackson rapproche les deux droites focales l’une del’autre de façon similaire (équivalent sphérique inchangé). Lecylindre croisé de Jackson est le seul verre qui permet decorriger l’astigmatisme sans avoir d’influence sur la composantesphérique de l’amétropie d’où son intérêt pour exprimer oureprésenter graphiquement l’astigmatisme.
126 O. Touzeau et al.

astigmate pure décrite par le cylindre croisé deJackson. L’expression en cylindre croisé de Jacksona également l’avantage par rapport aux expressionsen « cylindre positif » ou en « cylindre négatif »d’éviter l’ambiguïté liée à la transposition cylindri-que (cylindre+ ↔ cylindre–).17 Le cylindre est icialternativement positif ou négatif selon le méri-dien. L’expression mathématique et la représenta-tion graphique de l’astigmatisme sont égalementplus faciles avec l’expression en cylindre croisé deJackson.Les différentes expressions polaires de l’astig-
matisme (« cylindre » et « axe ») sont difficiles àexploiter d’un point de vue statistique, aussi bienau niveau individuel (calcul d’une variation d’astig-matisme d’un œil, ...) qu’au niveau d’un groupe(calcul de l’astigmatisme moyen par exem-ple).21,39,41 L’axe n’est pas une variable purementquantitative comme le cylindre et l’équivalentsphérique, mais une variable qualitative et direc-tionnelle. Les statistiques classiques ne sont pasapplicables directement à des données direction-nelles comme l’axe.39 Pour les études statistiques,l’expression polaire (cylindre et axe) doit êtreconvertie dans un autre système (système vecto-riel, cartésien ou matriciel ...).29,46,66 Les coordon-nées cartésiennes, les matrices, les vecteurs sontdes outils mathématiques simples et puissants quipermettent une analyse plus complète de l’astig-matisme.13,16,32
Expression vectorielle dans un plan
L’expression vectorielle de l’astigmatisme est leprolongement naturel de l’écriture polaire (cylin-dre et axe). Comme le vecteur, l’astigmatismepossède une grandeur quantitative et une grandeurqualitative de type directionnel. L’astigmatismepeut donc être décrit par un vecteur dans un plan.Cette représentation de l’astigmatisme par un vec-teur est d’ailleurs fort ancienne. Un vecteur estdéfini par trois paramètres : une norme, une direc-tion et un sens. La puissance du cylindre représentela norme du vecteur, tandis que l’axe de l’astigma-tisme définit la direction du vecteur (Fig. 15). Unedifficulté est liée au fait que l’axe de l’astigma-tisme représente uniquement une direction sansnotion de sens. Cette ambiguïté est due au fait quele cycle de l’astigmatisme s’étend de 0 à 180°, etnon de 0 à 360° comme en trigonométrie. Un axed’astigmatisme correspond d’un point de vue trigo-nométrique aux deux sens d’une même direction.Ainsi, les axes d’astigmatisme 0° et 180° sont iden-tiques. Ces deux axes correspondent en trigonomé-trie aux deux sens d’une même direction. La diffé-rence entre le cycle de l’astigmatisme et le cycle
trigonométrique engendre d’autres problèmes. Desaxes d’astigmatisme à 10° et 170° apparaissentéloignés sur un cercle trigonométrique, alors qu’enréalité ils ne sont séparés que de 20°. L’une dessolutions pour adapter les règles de trigonométrie àl’astigmatisme est le doublement des angles initia-lement proposé par Stokes (1849) puis adopté par laplupart des auteurs (Gartner, Jaffe, Naylor, Alpins,Holladay) (Fig 16).1,13,22,26,48,62 Dans l’exempleprécédent, après doublement, les axes deviennent20° et 340° et apparaissent plus proches (Fig 16).Une autre possibilité est l’utilisation de fonctionssinusoïdales ayant un cycle de 180° et ne présen-tant pas de changement de signe sur ce cycle (sin2
ou cos2 de Naeser).41,42
L’écriture vectorielle de l’astigmatisme permetde calculer facilement une variation de l’astigma-tisme par addition (ou soustraction) vecto-rielle.57,58 Les nombreuses méthodes vectoriellesqui se sont développées (Jaffé, Naylor, Holladay,Alpins...) ont d’ailleurs été pour la plupart crééesdans ce but.1,22,26,48 Cependant, du fait de sa di-mension directionnelle, le vecteur est un outil ma-thématique peu maniable quand on a affaire à plusde deux données (calcul de l’astigmatisme moyenpar exemple). Les données sont donc en généralanalysées avec d’autres outils mathématiques(coordonnées cartésiennes, matrice, ...). Leconcept de vecteur d’astigmatisme est cependantintéressant d’un point de vue graphique et l’astig-matisme est fréquemment visualisé de cette façon.
Figure 15 Représentation de l’astigmatisme par un vecteur dansun plan. L’astigmatisme peut être représenté par un vecteurdont la norme est égale au cylindre et la direction est égale audouble de l’axe (a × 2). Ce doublement de l’axe de l’astigma-tisme est nécessaire en raison du cycle non trigonométrique del’astigmatisme (180° au lieu de 360°). Ici représentation d’unastigmatisme de +1 à 30°.
127Astigmatisme : analyses mathématiques et représentations graphiques

Expression cartésienne
L’expression cartésienne de l’astigmatisme repré-sente l’extension directe du concept du vecteurd’astigmatisme. Un repère cartésien est placé aucentre du cercle trigonométrique. L’écriture po-laire de l’astigmatisme (cylindre, axe) est transfor-mée en deux coordonnées cartésiennes ou rectan-gulaires (abscisse, ordonnée) par projection surdeux axes orthonormés (x, y) en appliquant lesrègles de trigonométrie (Fig. 17).24,25 Certainsauteurs, comme Cravy, utilisent directement lescoordonnées rectangulaires sans doublement préa-lable des axes.9 L’utilisation de ces données estassez difficile car elle nécessite de définir uneconvention de signe, en raison de l’ambiguïté liée àla différence des cycles trigonométriques et del’astigmatisme. Ainsi, quand on analyse deux don-nées, la différence entre les deux axes ne doitjamais excéder 90°. Il faut ajouter ou retrancher180° le cas échéant à l’un des axes. La plupart desauteurs procèdent à un doublement de l’angle. Lescoordonnées cartésiennes (x, y) se calculent à par-tir des coordonnées polaires d’après les formulessuivantes :
• x = cylindre × cos (axe × 2)• y = cylindre × sin (axe × 2)Ces deux coordonnées correspondent aux coor-
données du vecteur que Gartner utilise pour définirl’astigmatisme (optometric vector).43 Certainsauteurs multiplient ces coordonnées cartésiennespar un facteur « 0,5 » ou « –0,5 », ce qui revient enfait à utiliser un cylindre croisé de Jackson. Lescoordonnées rectangulaires peuvent être utiliséespour de multiples analyses : calcul de l’astig-matisme moyen, calcul d’une variation d’astigma-
tisme.24,28,59,71 L’utilisation des coordonnéesrectangulaires a également un intérêt graphi-que.25,29,47
Valeurs polaires de Naeser
La puissance dans les deux méridiens principauxd’un astigmatisme régulier est facile à connaître.Dans le cas d’un cylindre, la puissance est maxi-male dans le contraxe, alors qu’elle est nulle dansl’axe du cylindre. Entre ces méridiens particuliers,
Figure 16 Transformation du cycle d’astigmatisme en un cycle trigonométrique par doublement de l’axe. Les axes 10° et 170° quiapparaissaient artificiellement éloignés d’un point de vue graphique se « rapprochent » après doublement de l’axe (20° et 340°). L’utilisationde fonctions trigonométriques impose un doublement de l’axe. À gauche : cycle de l’astigmatisme 180° ; à droite : cycle trigonométrique 360°.
Figure 17 Expression de l’astigmatisme par des coordonnéesrectangulaires (cartésiennes). L’addition d’un repère cartésienorthonormé sur le cercle trigonométrique permet le calcul descoordonnées rectangulaires par une simple projection du cylin-dre sur les axes des abscisses (X) et des ordonnées (Y). Ladistance du point M à l’origine O et la norme du vecteur sontégales à la puissance du cylindre exprimée en dioptries.
128 O. Touzeau et al.

la puissance varie graduellement entre ces deuxpuissances extrêmes (0 et la puissance du cylindre),et est approximée par la fonction « cylindre ×sin2a ».52
Puissance D ≈ Cylindre × sin2aCes fonctions sinusoïdales de type sin2a ou cos2a
ont l’avantage d’avoir un cycle de 180°. Il n’estdonc pas nécessaire de procéder à un doublementde l’axe de l’astigmatisme comme précédemment.La valeur de la fonction « sin2a » variant de 0 et 1,la puissance de l’astigmatisme varie entre les va-leurs « 0 » et « cylindre ».Naeser (1990) utilise cette approximation opti-
que pour décomposer l’astigmatisme en deux com-posantes (Fig. 18).41 La composante directe ouconforme à la règle (with the rule : WTR) et lacomposante indirecte ou contre la règle (againstthe rule : ATR) s’écrivent respectivement :
• D90 = cyl × sin2 a• D180 = cyl × sin2 (a + 90) = cyl × cos2 aL’addition des puissances des deux composantes
(D90 + D180) est égale au cylindre (car sin2a +
cos2a = 1). Naeser définit une valeur polaire (polarvalue) appelée KP égale à la soustraction des deuxcomposantes :41
KP = cyl × [(sin2a) – (cos2a)] = – cyl × cos (a×2) carcos 2a = cos2a – sin2a
La valeur polaire représente la différence dedeux fractions du cylindre projetées sur les méri-diens 90° et 180°. Il ne s’agit pas toutefois d’unesimple projection sur les axes des abscisses et desordonnées, comme c’est le cas avec les coordon-nées cartésiennes. En effet, le calcul de la valeurpolaire n’utilise pas les fonctions sinus et cosinus,mais ces fonctions élevées au carré. La valeur po-laire reflète l’équilibre entre les composantes di-recte et indirecte de l’astigmatisme.41 Ceci revientà affecter le cylindre d’un coefficient compris en-tre –1 et +1, dont la valeur est fonction de l’axe del’astigmatisme. Une valeur positive indique que lacomposante directe prédomine (astigmatisme se-lon la règle). Cette méthode a l’avantage de dé-crire à la fois le cylindre et l’axe avec une valeurunique non directionnelle. Naeser (1994) a étendusa méthode en proposant une décomposition del’astigmatisme, non plus obligatoirement selon lesaxes 90° et 180°, mais selon le méridien le pluspuissant (WTP) et le méridien orthogonal (ATP).42
Cependant, la décomposition de l’astigmatisme surdeux axes orthogonaux proposée par Naeser pré-sente des inconvénients majeurs. En effet, desastigmatismes peuvent avoir une même valeur po-laire bien que possédant des valeurs de cylindres etd’axes différentes.41 C’est le cas par exemple desastigmatismes présentant une symétrie en miroir(énantiomorphisme). Ainsi, les astigmatismes +2 à120° et +2 à 60° ont les mêmes valeurs polaires. Deplus, les astigmatismes ayant un axe à 45° ou 135°ont des valeurs polaires nulles quelle que soit lavaleur de leur cylindre (sin2 = cos2 pour 45° et135°).Afin d’éviter ces inconvénients, Naeser propose
de décomposer l’astigmatisme selon deux axes sé-parés de 45° et non plus de 90° comme précédem-ment.43 La valeur polaire K (90) reflète la compo-sante directe ou indirecte de l’astigmatisme, tandisque la valeur polaire K (135) traduit la composanteoblique. Un autre avantage de l’utilisation de deuxvaleurs polaires séparées par 45° est l’existenced’une relation avec les autres méthodes procédantà un doublement des angles (coordonnées carté-siennes, méthodes vectorielles).43 Les deux valeurspolaires K (90) et K (135) sont égales aux deuxcoordonnées cartésiennes : « cyl × cos (axe × 2) » et« cyl × sin (axe × 2) ». Les identités trigonométri-ques « cos 2a = cos2a - sin2a » et « sin 2a = 2 × sin a× cos a » permettent le passage des valeurs polairesde Naeser aux coordonnées cartésiennes.43
Figure 18 Décomposition de l’astigmatisme en une composantedirecte et une composante indirecte d’après Naeser. L’astigma-tisme ne doit être uniquement envisagé comme une puissancemaximale dans un axe unique. La puissance d’un méridienquelconque est donnée par une fonction du type « cylindre ×Sin2 ». Cette formule permet de décomposer l’astigmatisme enune composante « directe » de puissance D90 = cylindre × Sin2aet une composante « indirecte » de puissance D180 = cylindre ×Cos2a. La somme des deux composantes (D90 + D180) est égale aucylindre. La soustraction des deux composantes (D90 - D180)définit une valeur polaire (KP) qui reflète l’équilibre entre lescomposantes directe et indirecte de l’astigmatisme.
129Astigmatisme : analyses mathématiques et représentations graphiques

Il est également possible d’analyser l’astigma-tisme selon un méridien quelconque X choisi commeréférence à l’aide d’une valeur polaire méridionale« AKP » et d’une valeur polaire oblique « AKP(+45) ».45 Les deux valeurs polaires s’écrivent :
AKP = cyl × [(Sin (a + 90 – X) – cos (a + 90 – X)]
AKP (+45) = cyl × [(sin (a + 45 – X) – cos (a + 45 – X)]
Les valeurs polaires « AKP » et « AK (+45) » sontessentiellement utilisées pour analyser une varia-tion d’astigmatisme. Dans ce cas, il est intéressantd’analyser la variation de l’astigmatisme par rap-port à l’axe de l’astigmatisme initial pris commeréférence.45
Fonctions sinusoïdales et transforméede Fourier
Un sphérocylindre représente optiquement une va-riation régulière de puissance selon le méridien.Cette variation de puissance peut être décrite parune fonction sinusoïdale.63,65 La sphère, le cylindreet l’axe qui décrivent totalement le sphérocylindrepeuvent être utilisés pour définir la fonction.Comme vu précédemment, un même sphérocylin-dre peut être décrit de différentes façons (Fig. 19).On comprend intuitivement que la composantesphérique peut représenter une constante tandisque l’axe et le cylindre peuvent caractériser lapartie variable de la fonction. La partie variable dela fonction doit varier entre 0 et la valeur ducylindre sur un cycle de 180°. En pratique, lecylindre doit être multiplié par un terme variantentre 0 et +1 sur un cycle de 180°. Les termes« |cos (a)|, |sin (a)|, cos2(a) et sin2(a) » quiremplissent ces conditions peuvent être utilisés(Fig. 20).La puissance (P) d’un dioptre selon un méridien
quelconque (u) peut être décrite par une fonctiondu type :
P(u) = sphère + [cylindre × |cos (u – axe)|]
Cette formule a l’avantage d’utiliser directe-ment les paramètres usuels de la réfraction. Cepen-dant, la puissance moyenne du dioptre n’est pasuniquement décrite par la constante, mais dépendégalement du terme variable. De plus, la valeurabsolue n’est pas un opérateur mathématique fa-cile à utiliser.La géométrie différentielle définit, d’une façon
analogue à l’astigmatisme, la variation de courbured’une surface quelconque en fonction de ses deuxcourbures principales orthogonales (Kx, Ky). La for-mule d’Euler établit une relation entre la variationde courbure d’une surface selon un méridien quel-conque u et les deux courbures principales ortho-
gonales (Kx, Ky). a qui est l’angle entre le méridienu et l’un des méridiens principaux pris pour réfé-rence correspond à l’axe de l’astigmatisme.
K(u) = Kx × cos2 (u – a) + Ky × sin
2 (u – a)= Ky + [(Kx – Ky) × cos
2 (u – a)]
car : sin2 = 1 – cos2
La courbure (K) est l’inverse du rayon de cour-bure (K = 1/R). La courbure a la dimension d’unepuissance et est exprimée en dioptries. La puis-sance optique d’une surface réfractive quelconqueséparant deux milieux est en un point donné pro-portionnelle à la courbure (K) en ce point et à ladifférence des indices de réfraction des deux mi-lieux (n’ – n). La formule des dioptres sphériquesqui lie la puissance (P) au rayon de courbure (R)peut également être écrite en utilisant la courbure(K) au lieu du rayon de courbure (R) :
P =(n ′ − n)
R= K × (n ′ − n)
La puissance peut donc également s’écrire :63,65
P(u) :• = K × (n’ – n)• = [Ky × (n’ – n)] + [(Kx – Ky) × (n’ – n) × cos2 (u –axe)]
• = sph + cyl × cos2 (u – axe) [car sph = Ky (n’ – n)et cyl = (Kx – Ky) (n’ – n)]Comme cos2a = (1 + cos 2a) /2, la variation de
puissance d’un astigmatisme selon méridien peutfinalement s’écrire pour la notation en cylindrepositif :
La relation trigonométrique « cos (2a) = – cos(2(a – 90) ) » permet d’obtenir la notation encylindre négatif :
Le terme « cos [2 × a] » varie sur un cycle de 0 à180° non pas entre 0 et +1 mais entre –1 et +1. Ilfaut donc utiliser la moitié du cylindre et non lecylindre entier comme précédemment. La partievariable de cette fonction sinusoïdale varie doncentre les valeurs –cylindre/2 et +cylindre/2 sur uncycle de 180°. Ceci correspond sur le plan optique à
130 O. Touzeau et al.

Figure 19 Expressions d’un sphérocylindre par différentes fonctions sinusoïdales. La puissance du sphérocylindre peut être décritepar la somme d’une constante et une ou plusieurs fonctions sinusoïdales.A. Formulation en cylindre positif. La constante représente la sphère tandis que la fonction sinusoïdale décrit le cylindre. La puissancemoyenne du sphérocylindre (équivalent sphérique) a l’inconvénient d’être dépendante de la valeur du cylindre. En rouge :sphérocylindre, en pointillés : équivalent sphérique, en bleu : cylindre+, en vert : sphère.B. Formulation en cylindre négatif. En rouge : sphérocylindre, en pointillés : équivalent sphérique, en bleu : cylindre-, en vert : sphère.C. Formulation en double cylindre. Le sphérocylindre est la somme de deux cylindres sans composante sphérique pure. Contrairementau cylindre croisé de Jackson, la puissance de chaque cylindre est différente. Les deux cylindres peuvent être de signe opposé(astigmatisme mixte). La formulation en double cylindre est intéressante en chirurgie cornéenne, car elle permet de préciser lacontribution respective de chacun des méridiens principaux. On peut apprécier un « effet de couple » après une chirurgie del’astigmatisme par exemple. En rouge : sphérocylindre, en pointillés : équivalent sphérique, en bleu : deux cylindres.D. Formulation en cylindre croisé de Jackson (Fourier polaire). Le cylindre croisé de Jackson est constitué de deux cylindresorthogonaux de puissance opposée. Son équivalent sphérique est nul. L’équivalent sphérique du sphérocylindre est donc ici égal à lasphère. L’expression en cylindre croisé de Jackson a l’avantage de décrire le sphérocylindre avec deux termes indépendants :l’équivalent sphérique (ou la sphère) qui représente la puissance moyenne et le cylindre croisé qui représente la variation depuissance autour de la valeur moyenne. Cette formulation est adoptée par la majorité des auteurs qui analysent la réfraction. Lecylindre croisé de Jackson est ici décrit par une fonction de type « Cos (axe × 2) ». En rouge : sphérocylindre, en vert : équivalentsphérique, en bleu : cylindre croisé de Jackson.E. Formulation avec deux cylindres croisés de Jackson (Fourier rectangulaire). Le cylindre croisé de Jackson (J) est décomposé en unecomposante orthogonale J0 (astigmatisme direct/indirect) correspondant à un cylindre croisé de Jackson d’axe 0°/90° et une composanteoblique J45 correspondant à un cylindre croisé de Jackson d’axe 45°/135°. Les termes J0 et J45 donnent les valeurs des deux cylindrescroisés de Jackson. Ici la composante oblique est prédominante par rapport à la composante orthogonale. Le sphérocylindre est égal à lasomme de l’équivalent sphérique et des deux cylindres croisés de Jackson. En rouge : sphérocylindre, en vert : équivalent sphérique.
131Astigmatisme : analyses mathématiques et représentations graphiques

deux verres cylindriques de puissance opposée pla-cés de façon orthogonale, autrement dit à un cylin-dre croisé de Jackson (Fig. 14, 21). L’expression del’astigmatisme en cylindre croisé de Jackson estégalement intéressante ici. En effet, une variationsinusoïdale entre –1 et +1 est plus simple à exprimermathématiquement qu’une variation sinusoïdale en-tre 0 et +1. La variation du cylindre croisé de Jacksonpeut être exprimée par un sinus ou un cosinus et ne
nécessite pas l’utilisation d’une valeur absolue oud’un carré.La puissance du verre sphérique correspond à
une constante tandis que la puissance du cylindrecroisé de Jackson est décrite par une fonctionsinusoïdale (Fig. 22A). En posant J = cylindre/2, lapuissance (P) d’un sphérocylindre selon un méri-dien quelconque (u) s’écrit :
P(u) = équivalent sphérique + J × cos [2(u – axe)]
Cette expression du sphérocylindre est appelée« Fourier polaire » (polar Fourier) par Thibos, car lesdeux axes du cylindre croisé utilisés ici sont les deuxaxes correspondant aux deux expressions polaires(cylindre positif ou négatif) de l’astigmatisme.65
La relation trigonométrique « cos (a – b) = cos a ×cos b + sin a × sin b » permet d’obtenir à partir de laformule précédente :
P(u) = équivalent sphérique + J × cos (axe × 2) × cos(2u) + J × sin (axe × 2) × sin (2u)
Thibos définit deux coordonnées « J0 » et « J45 »correspondant à deux cylindres croisés de Jacksond’axe 0°/90° et 45°/135° :65
J0 = – 0,5 cyl × cos (axe × 2)
J45 = – 0,5 cyl × sin (axe × 2)
Figure 20 Exemples de fonctions susceptibles de décrire optiquement l’astigmatisme. Les fonctions doivent être continues et avoir uncycle de 180°.A. Fonctions dont l’amplitude varie de 0 à 1. Les fonctions dont l’amplitude s’étend de 0 à 1 sans changement de signe peuvent décrireun cylindre positif ou négatif (|Sina|, |Cosa|, Sin2a, Cos2a).B. Fonctions dont l’amplitude varie de –1 à +1. Les fonctions dont l’amplitude s’étend de –1 à +1 peuvent représenter les propriétésoptiques d’un cylindre croisé de Jackson [|Sina| - |Cosa|, (Sin2a – Cos2a)].
Figure 21 Représentation optique d’un cylindre croisé de Jack-son à l’aide d’une fonction sinusoïdale. Le cylindre croisé deJackson est constitué par deux cylindres de puissance opposée(+C/–C) placés orthogonalement. Sur cet exemple, les cylindres(+C) × 30° et (–C) × 120° sont représentés par une fonction « Cos(axe×2) ». Le cylindre croisé a une puissance qui varie de –C à +Csur un cycle de 180° avec un équivalent sphérique nul.
132 O. Touzeau et al.

Figure 22 Représentation de l’astigmatisme à l’aide des fonctions sinusoïdales. Sur cet exemple l’astigmatisme est de –1 (+2) ×30° ou+1 (–2) ×120°.A. Représentation de l’astigmatisme par un cylindre croisé de Jackson et une fonction sinusoïdale (Fourier polaire). Les deux verresdu cylindre croisé de Jackson ont pour axe les deux méridiens principaux de l’astigmatisme ; par contre la puissance de chaque verreest égale à la moitié du cylindre des expressions de l’astigmatisme en cylindre positif ou négatif.B. Représentation de l’astigmatisme par deux cylindres croisés de Jackson et deux fonctions sinusoïdales (Fourier rectangulaire). Laprojection du cylindre croisé de Jackson J sur les axes des abscisses et des ordonnées a permis une décomposition en deux cylindrescroisés de Jackson J0 et J45. Les deux cylindres croisés de Jackson de puissance ± J0 et ± J45 ont obligatoirement pour axes respectifs0°/90° et 45°/135°. Les deux fonctions sinusoïdales permettent la visualisation des composantes de l’astigmatisme : oblique ouorthogonale (astigmatisme direct/indirect). Ici la composante oblique prédomine : 30° est plus proche de 45° que de 0° ou de 90°.C. Relations mathématiques entre le cylindre croisé de Jackson (J) et les composantes orthogonale (J0) ou oblique (J45) del’astigmatisme. Les composantes orthogonale (J0) ou oblique (J45) de l’astigmatisme peuvent être exprimées sous forme vectorielledans un plan à partir du cylindre croisé de Jackson J. Il est nécessaire, pour représenter le vecteur du cylindre croisé de Jackson, dedoubler l’axe de l’astigmatisme et de ne prendre que la moitié du cylindre de l’écriture conventionnelle. J0 et J45 représententrespectivement le cosinus et le sinus du vecteur du cylindre croisé de Jackson J. Le théorème de Pythagore lie le cylindre croisé deJackson (J) aux composantes orthogonale (J0) et oblique (J45) de l’astigmatisme.D. Décomposition du cylindre croisé de Jackson J en deux cylindres croisés de Jackson. La projection du cylindre croisé de Jackson Jsur les axes des abscisses et des ordonnées donne deux cylindres croisés de Jackson J0 et J45 séparés de 45°. Les deux cylindres séparésde 90° de chaque cylindre croisé de Jackson apparaissent ici alignés en raison du doublement des angles. La puissance des cylindrescroisés de Jackson J0 et J45 est respectivement de ±0,50 D et de ±0,87 D.
133Astigmatisme : analyses mathématiques et représentations graphiques

La formule précédente s’écrit :
(u) = équivalent sphérique + J0 × cos (2u) + J45 × sin (2u)
La puissance du sphérocylindre est ici décrite parune constante (l’équivalent sphérique) et par deuxfonctions sinusoïdales (Fig. 22B). La fonction sinu-soïdale correspondant à un cylindre croisé de Jack-son (J) a été décomposée en deux fonctions sinusoï-dales correspondant à deux cylindres croisés deJackson (J0, J45) (Fig. 22C, D, 23). Cette écriture del’astigmatisme correspond en fait à une décompo-sition de l’astigmatisme en deux composantes :directe/indirecte et oblique.19 La composante di-recte ou indirecte (orthoastigmatism) correspondau cylindre croisé de Jackson J0 avec des axes à 0°et 90°. La composante oblique (oblique astigma-tism) correspond au cylindre croisé de Jackson J45avec des axes à 45° et 135°. Les deux cylindrescroisés J0, J45 sont décalés de 45° [sin (2u) = cos 2(u± 45°)]. L’écriture du sphérocylindre en une cons-tante et deux fonctions sinusoïdales est appelée
« Fourier rectangulaire » (rectangular Fourier) parThibos.65 En effet, J0 et J45 sont les coordonnéesrectangulaires de J après projection sur un repèreorthonormé (Fig. 22C). Des relations géométriquesou trigonométriques permettent le passage de l’ex-pression sinusoïdale à l’expression vectorielle ou àl’expression polaire.65,66 En particulier, J, J0 et J45sont liés entre eux par le théorème de Pythagore :
J = �J02 + J45
2
Les expressions du sphérocylindre par un termeconstant et une ou deux fonctions sinusoïdales cor-respondent à des cas particuliers de transformée deFourier. Tout signal périodique aussi irréguliersoit-il peut être décomposé en une série de Fourier,avec un terme constant et une somme de fonctionssinusoïdales de phase, d’amplitude et de fréquencebien définies (Fig. 24).
F(r) = A0 + �n = 1
n = +∞
An × Cos(nx0r + φn)
Figure 22 (suite)
Figure 23 Fourier « polaire » et Fourier « rectangulaire » à partir du système de Thibos. Dans le « Fourier polaire », le cylindre croiséde Jackson prend les axes des deux méridiens principaux de l’écriture polaire du cylindre (variable). Dans le « Fourier rectangulaire »,les deux cylindres croisés de Jackson ont obligatoirement pour axe 0°/90° et 45°/135°.
134 O. Touzeau et al.

Le premier terme est une constante (A0). Lestermes suivants sont des fonctions sinusoïdales dela fonction r dont les fréquences x sont des multi-ples entiers de la fréquence fondamentale x0. Cha-cun des termes possède une amplitude (A) et unephase propre (u).En utilisant la relation cos (a + b) = cos (a) × cos
(b) – sin (a) × sin (b) et en posant an = Ancos (un) etbn = – Ansin (un), l’équation précédente est séparéeen une partie variant avec r et une partie indépen-dante de r.
F(r) = A0 + �n = 1
n = +∞
� an × Cos(nx0r) + bn × Sin(nx0r) �
Les propriétés optiques de l’œil (ou de la cornée)peuvent être considérées comme un signal périodi-que et donc être analysées à l’aide de la transfor-mée de Fourier50,51,55 (Fig. 25). Il est possible dedonner une signification optique à chacun des ter-mes de l’équation précédente :55
• n = 0 ; A0 = constante ; composante sphérique• n = 1 ; a1 × cos (x0r) ; b1 × sin (x0r) : composanteprismatique (cycle de 360°)
• n = 2 ; a2 × cos (2 × x0r) ; b2 × sin (2 × x0r) : astigmatismerégulier (cycle de 180°)
• n = 3 ; a3 × cos (3 × x0r) ; b3 × sin (3 × x0r) : astigmatismeirrégulier (cycles < 180°)
• n = i ; ai × cos (i × x0r) ; bi × sin (i × x0r) : astigmatismeirrégulier (cycles < 180°)
Le terme constant représente la puissancemoyenne. Le deuxième terme dont le cycle est360° représente une composante prismatique (parexemple un mauvais alignement de l’axe géométri-que de la cornée par rapport à un vidéokérato-scope). Le troisième terme dont le cycle est de180° quantifie la composante régulière de l’astig-matisme. Les termes suivants dont les cycles sontinférieurs à 180° peuvent décrire l’astigmatismeirrégulier (Fig. 25).La réfraction subjective peut être décrite en
utilisant la décomposition en harmonique de Fou-
Figure 24 Exemple de reconstitution d’un signal périodique à partir de sa transformée de Fourier. Un signal périodique quelconquepeut être reconstitué par la somme d’une constante et de plusieurs fonctions sinusoïdales de période, d’amplitude et de phaseconvenablement choisies. Chacune des fonctions sinusoïdales possède une phase et une amplitude propres ainsi qu’une fréquence quiest un multiple entier de la fréquence fondamentale. Ici reconstruction d’une série de créneaux rectangulaires à partir des termes desa transformée de Fourier. Colonne de gauche : suite des termes de la transformée de Fourier ajoutés successivement. Colonne dedroite : résultat de chaque adjonction successive. L’introduction d’un terme supplémentaire a pour effet de rapprocher le tracé desdeux segments de droite qui constituent les créneaux. Un nombre infini de termes de fréquence croissante et d’amplitude tendantvers zéro, reconstitue progressivement les angles droits.
135Astigmatisme : analyses mathématiques et représentations graphiques

rier. Le sphérocylindre peut être caractérisé parune constante et une sinusoïde de 180°. Le termeconstant correspond à l’équivalent sphérique, tan-dis que l’amplitude et la phase de l’harmoniquecorrespondent respectivement à la puissance et àl’axe du cylindre croisé. Le sphérocylindre consti-tue un cas particulier où la composante prismatique(cycle de 360°) est nulle ainsi que l’astigmatismeirrégulier (hautes fréquences).Si les fonctions sinusoïdales et en particulier la
transformée de Fourier peuvent représenter la ré-fraction subjective, ces outils ont surtout un intérêtpour analyser l’astigmatisme irrégulier.51,55
Expression matricielle
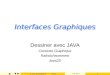
Le principe général de l’écriture matricielle estd’ordonner les différentes variables en lignes etcolonnes. Une matrice [N × p] correspond à N ligneset p colonnes (Fig. 26). Long a été le premier àexprimer les paramètres de la réfraction à l’aided’une matrice carrée de type 2 × 2 en 1976(Fig. 27).36 Il existe actuellement de nombreusesmatrices pour exprimer l’astigmatisme ou la réfrac-tion (Tableau 1). Malgré leur caractère abstrait, lesmatrices sont des outils mathématiques simples àutiliser (Fig. 26). Par exemple, pour connaître lesconséquences optiques de l’addition d’un dioptre(ou d’un verre) à un système optique, il suffitd’additionner la matrice du dioptre à la matrice dusystème initial.37
� a b
c d � Initial
+ � v w
y z � Dioptre
= � a + v b + w
c + y d + z � Final
Les calculs sont simples et se font séparémentpour chaque terme de la matrice. Aucun des termes
de la matrice ne représente une variable direction-nelle.31 Les matrices permettent les calculs demoyenne ou de variation de l’astigmatisme. Lesmatrices peuvent être exploitées statistiquementdans des analyses multivariées pour comparer laréfraction de plusieurs populations par exem-ple.46,66 À la fin des calculs ou des statistiques, desformules permettent de convertir la notation ma-tricielle en notation conventionnelle (polaire) pourobtenir un résultat plus compréhensible (Fig. 27)(Tableau 2).L’écriture matricielle est intéressante, car elle
permet de décomposer une matrice en une sommede matrices élémentaires qui correspondent cha-cune à des propriétés optiques spécifiques(Fig. 28).15,19 Ainsi, à une composante sphériquepure correspond toujours une matrice dont les ter-mes f11 et f22 sont égaux et différents de 0 (tracec’est-à-dire somme f11 + f22 non nulle) et des ter-
mes f12 et f21 égaux à 0. La matrice � 1 0
0 1 � est lamatrice élémentaire d’une sphère de 1D. La ma-
trice � Z 0
0 Z � peut s’écrire aussi Z × � 1 0
0 1 � . Cettematrice qui contient Z fois la matrice élémentairede la sphère correspond donc à une sphère de Zdioptries (Fig. 28A). Au contraire, une composanteastigmate pure se traduit par une matrice dont latrace est nulle (termes f11 et f22 nuls ou de valeursopposées) et des valeurs f12 et f21 identiques(Fig. 28B). La matrice de Long a également l’avan-tage de ne pas être influencée par la transpositioncylindrique (cylindre+ ↔ cylindre–).La matrice de Long permet d’analyser optique-
ment un dioptre en le décomposant en deux puis-
Figure 25 Décomposition de la courbure cornéenne antérieure en fonctions sinusoïdales (transformée de Fourier). La variation depuissance (ou du rayon de courbure) selon le méridien constitue un signal périodique. Cet exemple reproduit, à partir des donnéestopographiques, l’irrégularité de puissance de la face antérieure d’une cornée greffée. La variation irrégulière de la puissance est icidécrite par cinq fonctions sinusoïdales. Le terme constant correspond à la puissance moyenne, le cycle de 180° correspond àl’astigmatisme régulier, les cycles inférieurs à 180° (hautes fréquences) décrivent l’astigmatisme irrégulier.
136 O. Touzeau et al.

sances indépendantes : sphérique (stigmaticpower) et astigmate (astigmatic power) (Fig 29). Lacomposante sphérique (FSph) correspond à la puis-sance de l’équivalent sphérique.19 La composanteastigmate (FAst) correspond à un cylindre croisé deJackson, c’est-à-dire que sa puissance sphériqueest nulle (équivalent sphérique égale à 0). Harris vaplus loin dans la décomposition de la matrice astig-mate en définissant une composante orthogonale
(orthoastigmatism : FAst Ortho) et une composanteoblique (oblique astigmatism : FAst Oblique)(Fig. 29).19 La composante « orthogonale » traduitla composante directe ou indirecte de l’astigma-tisme et correspond optiquement à un cylindrecroisé de Jackson d’axes 0° et 90°. La composanteoblique correspond à l’astigmatisme oblique c’est-à-dire à un cylindre croisé de Jackson d’axes 45° et135°.
Figure 26 Généralités sur les matrices.A. Cas général d’une matrice. Cette matrice [N×p] correspond à N lignes et p colonnes. Cette matrice pourrait correspondre à pvariables pour un individu donné avec une population de N individus. Pour chaque variable X, le premier indice caractérise la ligne,tandis que le deuxième indice représente la colonne.B. Matrice carrée de type 2×2.C. Caractéristiques d’une matrice 2×2.D. Exemples d’opérations élémentaires avec une matrice. Les opérations d’addition, de soustraction, de multiplication ou de divisionde la matrice avec une constante ou une autre matrice se calculent de façon séparée pour chaque terme de la matrice.
Figure 27 Expression de la réfraction avec la matrice de Long. Cette matrice 2×2 permet d’exprimer les paramètres de la réfraction.La matrice est symétrique car f12 et f21 sont égaux. Des formules permettent de convertir la notation conventionnelle de la réfractionen notation matricielle et inversement. Le passage de la notation matricielle à la forme conventionnelle nécessite le calcul de la trace(T) et du déterminant (D) de la matrice. La réfraction peut être exprimée à l’aide de nombreuses autres matrices.
137Astigmatisme : analyses mathématiques et représentations graphiques

Harris a étendu le concept de la matrice depuissance de Long pour décrire des systèmes opti-ques plus complexes (dioptre épais et/ou asymétri-que).19 Dans ces cas, f12 et f21 ne sont plus égales.Harris définit une composante irrégulière à l’astig-matisme (antisymmetric astigmatism). L’astigma-tisme est donc constitué d’une composante symé-trique (FAst Sym) qui regroupe l’astigmatisme
orthogonal et l’astigmatisme oblique et d’une com-posante irrégulière ou asymétrique (Fig. 29).La matrice permet de décomposer la puissance
totale (FTotale) en composantes suivantes :• FTotale = FSph + FAst• FTotale = FSph + F Ast Sym + FAst irrégulier• FTotale = FSph + FAst Ortho + FAst Oblique + FAstirrégulier
Tableau 1 Principales matrices utilisées pour exprimer la réfraction.
Auteurs Matrices
Gartner 1965 � Cyl × Cos (axe × 2)
Cyl × Sin (axe × 2) �Long 1976 � Sph + Cyl × Sin2 (axe) − Cyl × Sin (axe) × Cos (axe)
− Cyl × Sin (axe) × Cos (axe) Sph + Cyl × Cos2 (axe) �Saunders 1989
�(Sph × 2) + Cyl
Cyl × Cos (axe × 2)
Cyl × Sin (axe × 2)�
Harris 1991
�Sph + Cyl × Sin2axe
−1
�2Cyl × Sin (axe × 2)
Sph + Cyl × Cos2axe�
Deal et Toop 1993
�−
1
2Cyl × Cos (axe × 2)
−1
2Cyl × Sin (axe × 2)
Sph +1
2Cyl
�Rabbetts 1996
� Sph +1
2Cyl
Cyl × Cos (axe × 2)
Cyl × Sin (axe × 2)�
Thibos 1997
�Sph +
1
2× Cyl
−1
2Cyl × Cos (axe × 2)
−1
2Cyl × Sin (axe × 2)
�Naeser 2001
�1
2× Cyl[Sin2((axe + 90) − X) − Cos2((axe + 90) − X)]
1
2× Cyl[Sin2((axe + 45) − X) − Cos2((axe + 45) − X)]
Sph +Cyl
2
�
138 O. Touzeau et al.

Les valeurs des différentes composantes sontégales à l’addition ou à la soustraction des termesf11 et f22 d’une part et des termes f21 et f12 d’autrepart.
FSph =1
2× ( f 11 + f 22)
FAst Ortho =1
2× ( f 11 − f 22)
FAst Oblique =1
2× ( f 21 + f 12)
FAst Irreg =1
2× ( f 21 − f 12)
Dans le cas d’un système sphérocylindrique, l’as-tigmatisme est par définition régulier. La compo-sante irrégulière est donc nulle (FAst irrégulier = 0). Lamatrice de Long ne permet pas d’analyser l’astig-matisme irrégulier car les termes f21 et f12 sontégaux. Pour calculer l’astigmatisme irrégulier, ilfaut d’une part quitter le système sphérocylindri-que, et d’autre part disposer d’autres données que
Tableau 2 Relations des expressions « non polaires » de l’astigmatisme avec le cylindre et l’axe.
Méthodes Définition Formule de conversion
Coordonnées
cartésiennes X = Cylindre × Cos (axe × 2) Cylindre = �x2 + y2
Axe =1
2× ArcTg � y
x � + C
avec C = 0° si X et Y > 0Y = Cylindre × Sin (axe × 2) C = +90° si X < 0
C = +180° si X > 0 et Y < 0
Thibos
J0 = −Cyl
2× Cos (axe × 2)
J45 = −Cyl
2× Sin (axe × 2)
Cylindre = 2 × �J02 + J45
2
Axe =
ArcTg� J45
J0�
2+ C
avec C=0 si J0 < 0 C = +90° si J0 > 0
Long
� f11
f12
f 21 f 22
�=� Sph + Cyl × Sin2 (axe) − Cyl × Sin (axe) × Cos (axe)
− Cyl × Sin (axe) × Cos (axe) Sph + Cyl × Cos2 (axe) �
Cylindre = �T2 − 4D
Sphère =T + Cylindre
2
Axe = ArcTg� Sphère − f 11
f 12�
T et D sont la trace et le déterminant de lamatrice
Naeser
KP(90) = Cyl × (Sin2a – Cos2a) Cylindre = ± �KP(90)2 + KP(135)2
Axe = ArcTg� Cyl − KP(90)
KP(135) � − 90KP(135) = Cyl × [Sin2(a – 45) – Cos2(a – 45)]
Naeser
AKP = Cyl × [(Sin2 (axe + 90 – X) – Cos2(axe + 90 – X)] Cylindre = ± �AKP2 + AKP(+ 45)2
Axe = ArcTg� Cyl − AKP
AKP(+ 45) � − 90AKP(+45) = Cyl × [(Sin2 (axe + 45 – X) – Cos2 (axe + 45 – X)]
X est un méridien quelconque choisi comme référence(en général, l’axe préopératoire en notation cylindre positif)
Figure 28 Signification optique des matrices élémentaires.A. Matrice élémentaire d’une sphère pure. Une sphère pure estcaractérisée par des coefficients f11 et f22 égaux et différents de0 (trace T non nulle) et des coefficients f12 et f21 nuls. L’équi-valent sphérique est égal à la moitié de la trace (f12 + f22) /2].B. Matrices élémentaires de l’astigmatisme. Les différents typesd’astigmatisme pur sont caractérisés par une trace nulle (ab-sence de composante sphérique). Les matrices exprimant lescomposantes orthogonale et oblique de l’astigmatisme corres-pondent à des cylindre croisés de Jackson.
139Astigmatisme : analyses mathématiques et représentations graphiques

la réfraction. Si on veut utiliser une matrice 2 × 2, ilfaut nécessairement que celle-si soit asymétrique,c’est-à-dire que les termes f21 et f12 puissent êtredifférents.La composante sphérique (FSph) de la matrice est
égale à l’équivalent sphérique. Les composantesorthogonale (FAst Ortho) et oblique (FAst Oblique) del’astigmatisme de la matrice sont respectivementégales aux coordonnées rectangulaires J0 et J45 deThibos (Fig. 30). La matrice de Long aboutit finale-ment à la même analyse de la réfraction que celleproposée par Thibos, puisqu’elle utilise les troismêmes termes [J0, J45, Eq Sph], c’est-à-dire unverre sphérique et deux cylindres croisés séparésde 45° d’axe 0°/90° et d’axe 45°/135°. La matrice(3 × 1) de Thibos [J0, J45, Eq Sph] ne constitue doncpas une perte d’information par rapport à la ma-trice 2 × 2 de Long. Ce fait s’explique car un destermes de la matrice de Long n’est pas informatif(deux des quatre termes sont égaux : f12 = f21). Laplupart des auteurs utilise pour décrire le sphéro-cylindre (ou un dioptre sphérocylindrique) une ma-trice de type 3 × 1 (Tableau 1). En général, l’équi-valent sphérique est utilisé pour décrire lacomposante sphérique. L’astigmatisme est souvent
exprimé à l’aide des deux autres variables aprèstransformation en cylindre croisé de Jackson. Lesmatrices plus complexes (jusqu’à 4 × 4) ne présen-tent un intérêt que pour analyser l’astigmatismeirrégulier.19,33
La plupart des méthodes cartésiennes, vectoriel-les ou sinusoïdales, vues précédemment, ont éga-lement une écriture matricielle (Tableau 1). Lepassage d’un système à un autre se fait générale-ment par l’intermédiaire des matrices. La situationest assez simple si les deux matrices sont de mêmetype. Une matrice de transposition permet de pas-ser de la matrice initiale à la matrice finale(Fig. 31).Le passage des différentes matrices à l’écriture
polaire est résumé dans le Tableau 2. Pour la ma-trice de Long, Keating a simplifié le calcul de lasphère du cylindre et de l’axe en utilisant la traceet le déterminant de la matrice, ce qui évitel’étape de la diagonalisation de la matrice.30,31,32
Nombres complexes
L’astigmatisme peut également être exprimé àl’aide de nombres complexes (z).56 Un nombre
Figure 29 Décomposition d’une matrice de puissance d’un dioptre en fonction des propriétés optiques (cas général). La matrice depuissance (F) peut être décomposée en plusieurs matrices élémentaires ayant chacune une signification optique. On peut séparer lescomposantes sphérique et astigmate. L’astigmatisme peut lui-même être décomposé en trois composantes : orthogonale, oblique etirrégulière. Les composantes orthogonale et oblique sont respectivement égales aux coordonnées J0 et J45 de Thibos. La composanteirrégulière est nulle dans le cas de la matrice de Long (modèle sphérocylindrique).
140 O. Touzeau et al.

complexe se compose d’une partie réelle R et unepartie imaginaire I que l’on fait précéder du sym-bole i. Un nombre complexe a une écriture du type :
a + ib avec a { R et b { I
Le premier terme appartient à l’axe des réels Rtandis que le second appartient à l’axe perpendicu-laire à celui-ci, désigné sous le nom d’axe imagi-naire. Les additions et soustractions des nombrescomplexes s’effectuent en traitant séparément lesparties réelles et imaginaires. Pour les multiplica-tions, il faut se souvenir que le carré i2 est égal à –1,ce qui entraîne la transformation en réelle de lapartie imaginaire correspondante. Un nombre com-plexe peut être représenté par un vecteur définipar les composantes réelle et imaginaire. À cevecteur correspond un module M et un argument(ou phase) définissant l’angle u que fait le vecteurpar rapport à l’axe des réels.
Module �M� = �a2 + b2
Tgφ =a
b
On a : a = |M| × cos u et b = |M| × sin u
Dans la décomposition de l’astigmatisme enterme « cos (axe × 2) » et en terme « sin (axe × 2) »,le cosinus peut correspondre à la composante réelled’un nombre complexe, tandis que le sinus peutrefléter la composante imaginaire du nombre.56 Sile nombre complexe (z) a été défini à partir del’écriture en cylindre croisé de Jackson et aprèsdoublement de l’axe, le passage du nombre com-plexe à l’écriture conventionnelle s’obtient à l’aidedes relations suivantes :
Sphère = équivalent sphérique + |z|
Cylindre = – 2 |z|
Axe =Arg(z)
2
Astigmatisme irrégulier
Définition
L’astigmatisme irrégulier est un concept mal définiregroupant diverses irrégularités optiques.34,61 Lespremières techniques de mesure de l’astigmatisme
Figure 30 Exemple numérique de décomposition de la réfraction à l’aide de la matrice de Long. La décomposition de la matrice deLong aboutit à la même analyse du sphérocylindre que la plupart des autres méthodes : une sphère et deux cylindres croisés deJackson. La composante sphérique est exprimée par l’équivalent sphérique (+1,50 D). Les deux cylindres croisés de Jacksonreprésentent les composantes « orthogonale » (±0,50 D à 0°/90°) et « oblique » (±0,87 D à 45°/135°) de l’astigmatisme. Les troiscoefficients obtenus par la décomposition de la matrice sont identiques à ceux obtenus directement par la méthode de Thibos.
Figure 31 Exemple de changement de systèmematriciel. Le passage d’un système à un autre se fait en général par l’intermédiaire desmatrices. La multiplication par une matrice de transposition a permis ici le passage du système de Rabetts au système de Thibos.
141Astigmatisme : analyses mathématiques et représentations graphiques

(verres cylindriques d’essai, ophtalmomètre de Ja-val, kératomètre...) ne mesuraient que l’astigma-tisme régulier. L’astigmatisme irrégulier a donc étédéfini de façon négative par rapport à l’astigma-tisme régulier qui, lui, pouvait être mesuré et êtrecorrigé par un verre sphérocylindrique.Un dioptre torique parfait produit un astigma-
tisme régulier. Dans ce cas, le rayon de courburevarie régulièrement d’un méridien à l’autre entredeux valeurs extrêmes correspondant aux deux mé-ridiens principaux. Les deux méridiens principauxsont orthogonaux et le rayon de courbure est cons-tant le long d’un même méridien. Dans ce cas idéal,la variation du rayon de courbure selon le méridienpeut être décrite mathématiquement par une fonc-tion sinusoïdale unique valable de l’apex à la péri-phérie du dioptre. L’astigmatisme irrégulier corres-pond à toute autre variation du rayon de courburedu dioptre. Ainsi, les deux méridiens principauxpeuvent ne pas être strictement non orthogonaux.De même, les deux hémiméridiens d’un méridienprincipal peuvent ne pas être alignés ou avoir unrayon de courbure différent (notion d’asymétrie).Au sens large, l’astigmatisme irrégulier inclut éga-lement l’asphéricité du dioptre. Le rayon de cour-bure ne varie pas ici d’un méridien à l’autre (tori-cité) mais le long d’un même méridien entre l’apexet la périphérie. La variation du rayon de courbured’un dioptre peut être anarchique.
Quantification de l’astigmatisme irrégulier
La quantification de l’astigmatisme irrégulier estcomplexe pour plusieurs raisons. Comme pour l’as-tigmatisme régulier, on a affaire à des donnéesquantitatives (comme le rayon de courbure ou lapuissance) et à des données directionnelles (axe).Ainsi, un astigmatisme peut être qualifié d’irrégu-lier du fait d’une asymétrie de puissance entredeux hémiméridiens d’un même méridien principalou du fait de l’absence d’alignement des deuxhémiméridiens d’un méridien principal. La plupartdes indices qui quantifient l’astigmatisme irrégu-lier ne prennent en compte que l’irrégularité de lavariation du rayon de courbure (ou de la puissance)en négligeant l’aspect directionnel. Par son es-sence même, l’astigmatisme irrégulier échappe àtoute modélisation, qu’elle soit géométrique(sphère, tore, ellipse...) ou optique. Enfin, comptetenu de sa définition, la détermination de l’astig-matisme irrégulier est souvent indirecte. L’astig-matisme total et l’astigmatisme régulier sont me-surés. L’astigmatisme irrégulier est souvent obtenuen soustrayant la composante régulière de l’astig-matisme à l’astigmatisme total :
Astigmatisme irrégulier = Astigmatisme total – As-tigmatisme régulier
Pour connaître l’astigmatisme irrégulier, il estindispensable de disposer des techniques modernesd’exploration (vidéokératoscopie, Orbscan®, aber-rométrie...).7,69 Les anciennes méthodes d’examen(réfraction subjective, skiascopie, réfractomètreautomatique, kératomètre...) qui reposent sur uneconception sphérocylindrique ne mesurent quel’astigmatisme régulier.
Topographie cornéenneL’intégration de l’ordinateur à la kératoscopie arendu possible l’analyse de plusieurs milliers depoints cornéens, réalisant une véritable topogra-phie de la cornée. L’irrégularité de la cornée peutêtre appréciée par la topographie conventionnelle(Placido) ou la topographie d’élévation (Orbs-can®).7,69 Ces techniques sont particulièrement in-téressantes pour le kératocône, la greffe de cornéeet la chirurgie réfractive cornéenne.
Classification des cartes de courbureLes cartes de courbure (axiale et tangentielle) destopographies Placido peuvent être classées en fonc-tion de la géométrie de la figure centrale sur lacarte colorimétrique.7,69 Ainsi, Bogan considèrecinq formes topographiques (patterns) : « rond »,« ovale », « sablier symétrique », « sablier asymé-trique » et « irrégulier »5 (Fig. 32). La forme « irré-gulière » est définie de façon négative puisqu’elleregroupe les topographies qui ne peuvent pas êtreclassées dans les quatre autres sous-groupes. Cetteclassification ne permet qu’une analyse grossièreet non quantitative de l’astigmatisme irrégulier.L’aspect des cartes de courbure ne reflète pas lagéométrie de la cornée. Les sabliers asymétriquespeuvent correspondre à un astigmatisme régulier.En fait, la classification de Bogan est bien corréléeau cylindre subjectif, que l’astigmatisme soit idio-pathique ou postchirurgical.5,68 Ainsi, les formesrondes ou ovales sont associées à un astigmatismesubjectif faible, alors que les formes en sabliersasymétriques et surtout symétriques sont associéesà un cylindre élevé.
Analyse de l’astigmatisme irrégulier par les deuxméridiens principauxLes topographes proposent une simulation de lakératométrie (« simK ») qui donne la puissance etl’axe des deux méridiens principaux :
Puissance1 × Axe1
Puissance2 × Axe1 ± 90°
Les deux axes sont dans ce cas obligatoirementséparés de 90°; ce qui revient en fait à mesurerl’astigmatisme régulier, autrement dit à réduire la
142 O. Touzeau et al.

cornée à une surface torique (modèle sphérocylin-drique).Beaucoup d’appareils proposent une mesure où
les deux méridiens principaux peuvent ne pas êtreorthogonaux :
Puissance1 × Axe1
Puissance2 × Axe2 avec Axe2 ≠ Axe1 ± 90°La différence formée par les deux axes par rap-
port à 90° donne une idée de l’irrégularité del’astigmatisme du point de vue de l’axe.
||Axe1 – Axe2| – 90°|
Analyse de l’astigmatisme irrégulier par les quatrehémiméridiensLa topographie cornéenne permet une analyse del’astigmatisme en quatre hémiméridiens. Contrai-rement aux données de la kératométrie, les deuxhémiméridiens d’un méridien principal ne sont pasnécessairement alignés et de même puissance. Bor-derie a créé deux indices pour quantifier l’astigma-tisme irrégulier à partir des données (puissance etaxe) des quatre hémiméridiens des 3 mm centraux(Fig. 33).6 Les hémiméridiens sont classés par ordrecroissant de puissance. P1 et P2 sont les puissancesdes deux hémiméridiens plats, tandis que P3 et P4
sont les puissances des deux hémiméridiens les plusbombés.
P1 × axe1, P2 × axe2, P3 × axe3, P4 × axe4
L’indice « RPSI » (Refractive Power SymmetryIndex) consiste à calculer la différence de puis-sance entre les deux hémiméridiens les plus plats etla différence de puissance entre les deux hémimé-ridiens les plus bombés et à faire la moyenne de cesdeux différences.7
RPSI = �P1− P2� +�P3− P4�2
� dioptrie �
L’indice « ASI » (Angle Symmetry index) consisteà calculer pour chaque couple d’hémiméridien ladifférence entre la valeur de l’angle entre deuxhémiméridiens et la valeur théorique de 180° et àfaire la moyenne entre ces deux différences.7
ASI = �180 −�axe1− axe2�� +�180 −�axe3− axe4��2
(degré)
Quand la forme topographique est en sablier (casle plus fréquent), les calculs du RPSI et du ASIutilisent les données des deux hémiméridiens oppo-sés. Il s’agit pour l’indice RPSI d’une quantificationde l’asymétrie de la puissance pour l’indice RPSI et
Figure 32 Classification de Bogan. Les cartes de courbure (axiale et tangentielle) de la topographie Placido peuvent être classées encinq formes selon des critères précis décrits par Bogan. Les cornées « normales » ont généralement une forme ronde, ovale ou ensablier. Les topographies non classables en « rond », « ovale » ou « sablier » sont qualifiées d’irrégulières. En cas d’asphéricité« oblate », la distribution des couleurs entre le centre et la périphérie est inversée (figure centrale de couleur froide et périphérie decouleur chaude). 1. Rond ; 2. ovale ; 3. sablier asymétrique ; 4. sablier symétrique ; 5. irrégulier ou inclassable.
143Astigmatisme : analyses mathématiques et représentations graphiques

une quantification du degré d’alignement des deuxhémiméridiens pour l’indice ASI. Dans le cas desurfaces sphériques ou toriques (astigmatisme ré-gulier pur), les indices RPSI et ASI ont une valeurégale à 0. Les indices « RPSI » et « ASI » sontbeaucoup moins pertinents quand on est en pré-sence d’une forme topographique qui n’est pas unsablier (forme ronde, ovale ou irrégulière). Dansces cas, les deux couples d’hémiméridiens analysésne sont souvent pas les hémiméridiens opposés, cequi limite l’intérêt de ces indices. Cependant, cecia moins de conséquence pour l’indice RPSI que pourl’indice ASI, car les formes « non sablier » sontsouvent associées à un cylindre faible, et par consé-quent la valeur du RPSI reste également faible.68
Indices topographiques
Les cartes topographiques apportent une grandequantité d’informations plus ou moins subjectivesque l’on a du mal à saisir. Les indices topographi-ques ont pour objectif de résumer objectivementcertaines caractéristiques de la cornée par unedonnée quantitative ou qualitative. Beaucoup d’in-dices topographiques ont été développés sur lesdifférents topographes.5 Certains indices ont pourunique objectif la détection du kératocône.D’autres moins spécifiques quantifient l’irrégula-rité, l’asymétrie ou l’asphéricité de la cornée. Lediagramme de Holladay du topographe « EyeSys »propose une quantification de l’astigmatisme régu-
Figure 33 Quantification de l’astigmatisme irrégulier à partir des données des quatre hémiméridiens des cartes topographiques.A. Surface torique (sphérocylindrique) (exemple théorique). Les deux hémiméridiens de chaque méridien principal sont alignés et ontla même puissance. La valeur des indices RPSI et ASI est nulle.B. Astigmatisme idiopathique (carte de courbure axiale de l’Orbscan®). L’astigmatisme irrégulier est négligeable ici. L’indice RPSI estégal à 0,2 D. L’indice ASI est égal à 0 car les deux couples d’hémiméridiens sont alignés.C. Astigmatisme postkératoplastie (carte de courbure axiale de l’Orbscan®). Les deux couples d’hémiméridiens principaux ne sont pasalignés et ont une puissance différente. La valeur du RPSI est de 4,15 D. La valeur du ASI est 60°. L’astigmatisme est ici très irrégulier.
144 O. Touzeau et al.

lier et de l’astigmatisme total dont la modalité decalcul n’est pas divulguée.23 L’astigmatisme totalest toujours supérieur à l’astigmatisme régulier. Lacomparaison de ces deux astigmatismes permetd’évaluer, d’après Holladay, l’astigmatisme irrégu-lier.23 Dans ce logiciel, il existe également un in-dice d’uniformité cornéenne (CU index) dont lavaleur varie de 0 à 100 %.23 La valeur de 100 %correspond à une cornée de surface régulière. Lavaleur décroît avec l’irrégularité de la surface cor-néenne. Cet indice est peu sensible en raison de lalargeur de son pas (10 %). De plus, le mode de calculn’est pas connu précisément.Le topographe « TMS » possède également plu-
sieurs indices mesurant la régularité de la surfacecornéenne :
• l’indice SAI (Surface Asymmetry Index) est unemesure de l’asymétrie calculée à partir de ladifférence de puissance entre des couples depoints diamétralement opposés. La mesure esteffectuée sur 128 méridiens des quatre an-neaux les plus centraux. Quand la surface estparfaitement sphérique ou torique, l’indice SAIest égal à 0°11
• l’indice SRI (Surface Regularity Index) quanti-fie la régularité de la surface en analysant ladistribution de puissance le long de 256 méri-diens sur les 10 mires centrales (correspondantgrossièrement à surface de la pupille d’en-trée).72 Quand la puissance ne présente pasune variation régulière (croissance ou décrois-sance) sur les trois mires adjacentes, la valeurabsolue de la différence entre ces trois miresest sommée. L’indice SRI est bien corrélé àl’acuité visuelle ;72
• l’indice TI (Topographic Irregularity) proposéMaloney vise à quantifier l’irrégularité en com-parant la surface par rapport au meilleur sphé-rocylindre par la méthode des moindres car-rés.38 L’indice est égal à la racine carrée de lasomme des carrés des différences entre la puis-sance de la surface et la puissance du meilleursphérocylindre. L’indice TI augmente avec l’ir-régularité de la cornée.- Indices « Irreg » de l’Orbscan®.L’Orbscan® propose une quantification de l’irré-
gularité des surfaces cornéennes antérieure ou pos-térieure dans les zones « 3 mm » et « 5 mm ».L’indice « Irreg » exprimé en dioptries est calculé àpartir de l’écart-type des rayons de courbure dansla zone et pour la surface cornéenne étudiée.69
- Indices d’asphéricité.Les indices d’asphéricité ont pour objectif de
quantifier l’asphéricité de la cornée, c’est-à-direson éloignement de la forme sphérique.14 Dans lanotion d’asphéricité, le rayon de courbure varie
régulièrement entre l’apex et la périphérie et nonpas d’un méridien à l’autre (toricité ou astigma-tisme régulier) (Fig. 34). Une surface asphériqueest qualitativement prolate ou oblate selon qu’ellebombe ou qu’elle s’aplatit dans la dimensionaxiale. L’asphéricité de la cornée normale est pro-late (arc hyperbolique d’une ellipse), c’est-à-direqu’il existe un bombement relatif de la partie cen-trale de la cornée par rapport à la périphérie. Lerayon de courbure des surfaces prolate augmentede l’apex vers la périphérie. Toutes les chirurgiescornéennes de la myopie visent à provoquer unediminution de la courbure de la partie centrale dela cornée. Cet aplatissement central relatif modifieprofondément l’asphéricité de la cornée qui de-vient oblate (arc parabolique d’une ellipse). Lerayon de courbure des surfaces oblate diminue del’apex vers la périphérie. Avec un rayon de cour-
Figure 34 Modélisation géométrique de l’irrégularité d’un diop-tre.A. Toricité d’un dioptre. Un dioptre torique possède deux rayonsde courbure situés dans deux méridiens principaux orthogonaux.Le rayon de courbure varie régulièrement d’un méridien àl’autre mais reste constant le long d’un même méridien. Undioptre torique possède deux focales orthogonales et correspondoptiquement à l’astigmatisme régulier c’est-à-dire optiquementcorrigible.B. Asphéricité d’un dioptre. L’asphéricité est caractérisée parune variation du rayon de courbure entre l’apex et la périphériele long d’un même méridien. L’asphéricité est caractérisée parle rayon du cercle osculateur et un indice d’excentricité (oud’asphéricité) qui quantifie l’éloignement de la géométrie sphé-rique. La topographie cornéenne peut quantifier l’asphéricité dela face antérieure de la cornée. Optiquement, l’asphéricitécorrespond à l’aberration de sphéricité.
145Astigmatisme : analyses mathématiques et représentations graphiques

bure constant, la sphère se positionne entre lessurfaces prolate et oblate. Il existe des relationsmathématiques entre les différents indices d’as-phéricité (coefficient d’asphéricité « Q », le shapefactor « 1 + Q », l’indice d’excentricité « e »...).14
Dans l’astigmatisme irrégulier, le rayon de cour-bure varie de façon irrégulière le long d’un méri-dien mais également d’un méridien à l’autre. L’as-phéricité ne représente qu’une partie del’astigmatisme irrégulier.
Transformée de FourierLa décomposition en séries de Fourier peut êtreutilisée pour exploiter de façon plus complète lesdonnées de la vidéokératoscopie.12,21,50,51 Le prin-cipe consiste à exprimer les valeurs de puissance(ou de rayon de courbure) de chacun des anneauxdu disque de Placido en fonction du méridien. Lapuissance en fonction du méridien est donc consi-dérée comme une fonction périodique de fré-quence 360°. Cette fonction « puissance » est dé-composée à l’aide de la transformée de Fourier enune somme de plusieurs fonctions sinusoïdalesd’amplitude et de phase convenablement choisiesappelée « harmonique ». L’harmonique dont lecycle est de 180° représente l’astigmatisme régu-lier. Les harmoniques de haute fréquence (cycleinférieur à 180°) décrivent l’astigmatisme irrégu-lier. L’astigmatisme irrégulier peut être quantifiéen soustrayant de la fonction « puissance » lacomposante sphérocylindrique (Fig. 35). Plusieursindices ont été proposés pour quantifier l’astigma-tisme irrégulier à partir des séries de Fourier. Fried-
man utilise la racine carrée de la somme des carrésdes amplitudes des harmoniques de cycle inférieurà 180° (de i = 3 à i = n).12
Osbika calcule en chaque méridien la différenceentre la somme de l’ensemble des harmoniques(approximant la fonction réelle) et la somme de laconstante et de l’harmonique ayant une phase de180°. Ceci revient à soustraire de la puissancetotale la composante sphérocylindrique (indiceLi).51
AberrométrieL’aberromètre utilise les propriétés ondulatoiresde la lumière pour analyser les caractéristiques del’ensemble de l’œil. Une source lumineuse est fo-calisée au niveau de la macula, et celle-ci renvoieun faisceau émergeant qui sort de l’œil après avoirtraversé l’ensemble des milieux oculaires (principede Hartmann-Shack). La distorsion du front d’ondeémergeant (wavefront) permet d’établir par rap-port au front d’onde émis une cartographie desaberrations optiques de l’œil. Les aberrations opti-ques sont analysées à l’aide de fonctions mathéma-tiques complexes comme la transformée de Fourierou les polynômes décrits par Zernicke. Les diffé-rents termes de ces polynômes représentent desniveaux successifs d’aberrations optiques d’ordrecroissant. Alors que la réfractométrie n’analyseque la défocalisation sphérocylindrique (amétropiesphérique et astigmatisme régulier), l’aberromé-trie permet l’étude d’aberrations optiques d’ordreplus élevé. La qualité d’une surface de front d’ondepeut être exprimée par un chiffre appelé RMS
Figure 35 Quantification de l’astigmatisme irrégulier à l’aide de la topographie cornéenne. Cette cornée greffée présente unastigmatisme irrégulier important. Les données de la topographie cornéenne permettent de reconstituer la variation de la puissancecornéenne en fonction du méridien pour de l’anneau « 3 mm » (rayon 1,5 mm du centre) (courbe noire). La courbe rouge est lakératométrie simulée proposée par le topographe. L’astigmatisme irrégulier peut être quantifié en utilisant la fonction « puissance »et la composante sphérocylindrique.
146 O. Touzeau et al.

(Root-Mean-Square), qui est la racine carrée de lavariance du front d’onde par rapport à la sphère deréférence en chaque point.
Représentations graphiquesde l’astigmatisme
Un phénomène complexe comme l’astigmatismepeut être représenté de multiples manières selonl’aspect que l’on désire privilégier. Certains graphi-ques ne visualisent que l’astigmatisme régulier,tandis que d’autres peuvent également décrire lacomposante sphérique de l’amétropie ou l’astigma-tisme irrégulier. Chacune des représentations gra-phiques repose sur un formalisme mathématiquepropre. L’objectif est cependant commun : il s’agitde transformer des informations mathématique-ment hétérogènes (directionnelles ou quantitati-ves) dans un système statistiquement exploitableet compréhensible, c’est-à-dire ne comportantqu’un nombre réduit de dimensions (en pratiquedeux ou trois).
Courbes sinusoïdales
La courbe sinusoïdale est le graphique le plus intui-tif pour saisir la nature de l’astigmatisme. Ce typede graphique permet de visualiser dans un plan lavariation de puissance selon le méridien. Le graphi-que utilise pour représenter l’astigmatisme régu-lier une (ou plusieurs) fonction(s) sinusoïdale(s)possédant un cycle de 180° (Fig. 19).55,56,66 On peutajouter sur ce graphique la composante sphériquereprésentée sous la forme d’une constante. Lafonction sinusoïde peut être décomposée en deuxafin de visualiser les composantes orthogonale(directe/indirecte) et oblique de l’astigmatisme.66
Ce type de graphique permet également une repré-sentation de l’astigmatisme irrégulier à l’aide defonctions sinusoïdales de plus haute fréquence (cy-cle < 180°) et de la transformée de Fourier.55 Laprincipale limite du graphique sinusoïdal est lenombre extrêmement réduit de données qu’il estpossible de faire figurer. On peut représenter l’as-tigmatisme moyen d’une population ou l’astigma-tisme d’un œil avant et après une chirurgie.
Représentation de l’astigmatisme dansun plan
L’astigmatisme peut être représenté dans un planpar un vecteur ou par un point déterminés à partirdes données polaires (cylindre, axe) ou des coor-données rectangulaires (x, y). La représentation de
l’astigmatisme nécessite le doublement de l’axe del’astigmatisme et l’utilisation d’une convention designe unique (cylindre positif ou cylindre négatif).Plusieurs auteurs utilisent les coordonnées carté-siennes en multipliant préalablement le cylindrepar un facteur 0,5 ou -0,5.10,65,66 Ces méthodesprésentent un intérêt uniquement si l’on souhaiteanalyser simultanément l’astigmatisme et la com-posante sphérique. En revanche, elles apparaissentgraphiquement plus éloignées de l’écriture polairede l’astigmatisme.Le graphique développé par Holladay (scatter
plot) est le plus simple pour visualiser simultané-ment le cylindre et l’axe de l’astigmatisme(Fig. 36).24,25 Ce graphique, constitué d’un cercletrigonométrique (360°), correspond au graphiqueobtenu par les coordonnées cartésiennes avec dou-blement de l’axe. Cependant, pour une meilleurecompréhension, c’est l’axe initial (c’est-à-dire nondoublé) de l’astigmatisme qui figure sur le graphi-que. Le graphique d’Holladay est donc égalementdirectement utilisable à partir des données polaires(cylindre et axe) de l’astigmatisme. Chaque astig-matisme correspond à un point M unique défini parses coordonnées x et y. La distance entre l’origineO (0,0) et un point quelconque M (x, y) est égale à la
Figure 36 Représentation de l’astigmatisme avec le graphiqued’Holladay. Ce graphique permet de visualiser simultanément lecylindre et l’axe. Les différents anneaux représentent des cylin-dres d’isopuissance de valeur croissante du centre vers la péri-phérie. Le point central correspond à l’emmétropie ou à uneamétropie sphérique pure. Le principal intérêt de ce graphiqueest l’utilisation d’un cycle de 180°. L’aspect du graphique estéquivalent à celui qui serait obtenu en utilisant un cycle trigo-nométrique avec doublement de l’axe. L’astigmatisme est re-présenté par un point (ici « 1 D à 30° »). Pour une meilleurecompréhension, ce sont les axes initiaux qui sont figurés et nonles axes réels (doublés).
147Astigmatisme : analyses mathématiques et représentations graphiques

valeur absolue du cylindre (théorème de Pytha-gore).
��OM �� = �(x − 0)2+ (y − 0)2 = �x2+ y2
= �[Cyl × Cos(axe × 2)]2 + [Cyl × Sin(axe × 2)]2
= �Cyl2
= �Cylindre�Tous les points correspondant à des astigmatis-
mes de même cylindre forment un cercle car ilssont situés à la même distance de l’origine O(Fig. 36). L’astigmatisme de l’ensemble d’une po-pulation et l’astigmatisme moyen sont aisémentvisualisables avec le graphique d’Holladay.24,25
L’aspect du graphique est bien corrélé avec l’astig-matisme moyen, d’où un intérêt clinique. Il a per-mis à Holladay de visualiser un astigmatisme directpeu important induit par la suture d’une incision dephacoémulsification. Un faible astigmatisme obli-que induit par le décalage du site d’une incision dephacoémulsification du côté de la main dominantea également été visualisé par ce graphique.24
Représentation de l’astigmatisme dansl’espace
Un astigmatisme régulier peut parfaitement êtredécrit par deux paramètres (deux coordonnées rec-tangulaires x, y par exemple). Un espace à deuxdimensions, c’est-à-dire un plan, est suffisant pourreprésenter graphiquement l’astigmatisme régu-lier. Des espaces de dimension supérieure ont étéimaginés afin de représenter simultanément l’as-tigmatisme régulier, la composante sphérique etl’astigmatisme irrégulier. En pratique, un espacetridimensionnel constitue le maximum pour unereprésentation graphique compréhensible. Le prin-cipe est de créer un espace de puissance dioptriqueà partir de trois variables indépendantes qui défi-nissent les trois axes orthogonaux du graphique (Fig37A). Les variables utilisées sont souvent les termesdes matrices de puissance servant à définir l’astig-matisme ou la réfraction. L’espace de puissancedioptrique doit être homogène et euclidien, afinque les notions de distances et d’angles dans cetespace aient une signification optique.15 Les troisvariables utilisées doivent donc posséder certainespropriétés optiques et donc respecter certainescontraintes mathématiques. Les variables ne doi-vent pas être modifiées par la transposition cylin-drique (cylindre+↔ cylindre–).17 De plus, les varia-bles doivent constituer un sous-espace vectoriel.Par exemple, l’équivalent sphérique est une varia-ble pertinente pour représenter graphiquement lacomposante sphérique de l’amétropie (Fig. 37B). La
valeur de l’équivalent sphérique est inchangéequelle que soit l’expression polaire utilisée pourdécrire l’astigmatisme (cylindre+ ou cylindre–). Deplus, l’équivalent sphérique constitue une dimen-sion d’un espace dioptrique dans lequel l’addition etla multiplication sont définies. L’addition de puis-sance sphérique donne toujours une puissance sphé-rique. De façon similaire, la moyenne arithmétiquede plusieurs puissances sphériques donne une puis-sance sphérique. Contrairement aux cylindres croi-sés de Jackson, les cylindres ne constituent pas unsous-espace vectoriel. En effet, l’addition de deuxcylindres purs ne donne pas en général un cylindrepur. Une partie de la puissance cylindrique se trans-forme en puissance sphérique, sauf si les deux cylin-dres sont parfaitement alignés ou orthogonaux. Deplus, la valeur du cylindre est influencée par le choixde l’expression polaire de l’astigmatisme (cylindre+ou cylindre-). Le cylindre n’est donc pas une varia-ble intéressante pour représenter graphiquementl’astigmatisme dans un espace dioptrique.Harris a montré, en analysant les matrices de
puissance, que tout astigmatisme pouvait finale-ment se décomposer en trois parties distinctes : unecomposante orthogonale, une composante obliqueet une composante irrégulière.15,16,17,18,19,20 Il fautdonc trois dimensions pour représenter parfaite-ment les propriétés de l’astigmatisme et quatredimensions si on veut en plus faire figurer la com-posante sphérique de la puissance (Fig. 37A).16
L’astigmatisme irrégulier est souvent négligé. Lestrois dimensions sont alors utilisées pour représen-ter le sphérocylindre : une dimension pour la com-posante sphérique, l’astigmatisme régulier étantexprimé dans un plan (Fig. 37B).La matrice de Long a été la première à être
utilisée pour définir un espace de puissance diop-trique. Cette matrice 2 × 2 comporte quatre termesdont deux termes identiques (matrice symétrique).Il reste donc trois termes informatifs que l’on peututiliser pour définir un espace vectoriel de dimen-sion 3. La matrice peut en effet s’écrire sous unecombinaison linéaire de trois vecteurs :
�1 0
0 0 �, �0 1
1 0 �, �0 0
0 1 �(Sph + Cyl × Sin2�) �1 0
0 0 �� − Cyl × Sin � × Cos � ��0 1
1 0 �(Sph + Cyl × Cos2�) �0 0
0 1 �Les trois coordonnées cartésiennes définissant
l’espace dioptrique sont des puissances. La norme
148 O. Touzeau et al.

de la matrice (ou du vecteur) doit donc être égale-ment une puissance.
Norme = �(Sph + Cyl × Sin2�)2 − (Cyl × Sin � × Cos �)2 + (Sph + Cyl × Cos2�)2
=��Sph +Cyl
2−
Cyl
2× Cos 2��2
+ � Cyl
2× sin 2��2
+ �Sph +Cyl
2−
Cyl
2× Cos 2��2
=� Sph2 + (Sph + Cyl)2 −Cyl2
4× Sin2(axe × 2)
Cette norme a l’inconvénient d’être dépen-dante de l’axe de l’astigmatisme, ce qui n’a pas designification clinique. Cette représentation gra-phique n’est donc pas très pertinente. L’un des
objectifs était justement de s’affranchir desdonnées directionnelles de l’astigmatisme. Le pas-sage de quatre à trois dimensions en éliminant l’undes termes redondants de la matrice a en fait
Figure 37 Représentation tridimensionnelle de l’astigmatisme.A. Principes de la représentation tridimensionnelle de l’astigmatisme. Trois variables sont suffisantes pour décrire parfaitementl’astigmatisme. L’astigmatisme est représenté dans l’espace par un point ou un vecteur. L’astigmatisme régulier, défini par deuxvariables, peut être représenté graphiquement dans un plan. L’astigmatisme irrégulier est défini par une troisième variableorthogonale au plan de l’astigmatisme régulier.B. Principe de la représentation tridimensionnelle d’un sphérocylindre. En négligeant l’astigmatisme irrégulier, la troisième variable peutêtre utilisée pour décrire la composante sphérique de l’amétropie. La composante sphérique est décrite par l’équivalent sphérique enraison de son indépendance de l’astigmatisme. La composante sphérique est donc orthogonale au plan de l’astigmatisme régulier.C. Représentation tridimensionnelle d’un sphérocylindre dans un espace dioptrique (d’après Thibos). L’astigmatisme régulier estreprésenté dans un plan par un cylindre de croisé de Jackson après doublement de l’axe (vecteur J). Le cylindre croisé de Jackson estlui-même décomposé en deux cylindres croisés de Jackson (J0 et J45) par projection sur deux axes. Cette décomposition permet dedéfinir le cylindre croisé à l’aide de deux variables non directionnelles (x, y). L’utilisation de l’équivalent sphérique comme troisièmecoordonnée permet de définir le sphérocylindre dans un espace dioptrique homogène. Chaque sphérocylindre (sphère, cylindre, axe)est transformé en trois coordonnées cartésiennes (xa, ya, za) qui définissent un point (point A) ou un vecteur (flèche rouge). Ladécomposition du sphérocylindre en trois lentilles ou trois coordonnées est intéressante. Chacun des termes a une significationoptique spécifique : composante sphérique, composante astigmate directe/indirecte, composante astigmate oblique. La norme duvecteur sphérocylindrique ou la distance OA représentent la défocalisation sphérocylindrique.
149Astigmatisme : analyses mathématiques et représentations graphiques

déformé l’espace dioptrique en le rendant nonhomogène.Afin d’éviter cette déformation, Harris propose
une autre représentation graphique en trois dimen-
sions à partir de la matrice Long.15,16,19,20 Dans unpremier temps, il calcule la norme des quatre ter-mes de la matrice de Long. Cette norme qui estindépendante de l’axe du cylindre et est égale à :
Norme = �(Sph + Cyl × Sin2�)2 + 2 × (− Cyl × Sin� × Cos�)2+ � Sph + Cyl × Cos2�)2
= �Sph2+ � Sph + Cyl)2
Harris va ensuite affecter un coefficient aux troistermes informatifs de la matrice de façon à cequ’ils aient la même norme que la matrice initialede Long. En pratique, le terme commun de lamatrice (F12 ou F21) est multiplié par le facteur«�2». Le prix à payer pour conserver la norme dela matrice de Long est la perte du caractère ortho-normé de l’espace. La représentation graphiqueproposée de Harris est difficile à comprendre pourune autre raison. Les trois termes de la matriceainsi que les trois axes qu’ils définissent ne repré-sentent pas une valeur optique concrète. Les rela-tions entre les coordonnées d’un point ou d’unvecteur représentant un sphérocylindre et les para-mètres de la réfraction sont complexes. L’espacedioptrique de Harris ne permet pas une représenta-tion graphique rigoureuse des cylindres purs, carceux-ci ne constituent pas un sous-espace vecto-riel. Dans cet espace, les cylindres croisés de Jack-
son sont représentés dans un plan tandis que leséquivalents sphériques sont sur une droite perpen-diculaire à ce plan. Toutefois, ce plan et cettedroite ne correspondent pas aux trois axes de réfé-rence et sont par conséquent difficiles à visualiserdans l’espace dioptrique.
Deal et Toop ont proposé une représentationgraphique 3D plus simple (Fig. 37C).10 Les troistermes informatifs de la matrice de Long corres-pondent chacun à une lentille :
�1 0
0 0 �, �0 1
1 0 �, �0 0
0 1 �[(+ 1 × 90°],
[+ 1(− 2) × 45°], [(+ 1) × 180°]
Une lentille sphérocylindrique peut doncs’écrire :
(Sph + Cyl × Sin2 �)[(+ 1) × 90°] − Cyl × Sin � × Cos �[+ 1(− 2) × 45°] + (Sph + Cyl × Cos2 �)[(+ 1) × 180°]
= −Cyl
2Cos 2�([(+ 1) × 90°] − [(+ 1) × 180°]) −
Cyl
2Sin 2�([+ 1(− 2) × 45°]) + �Sph +
Cyl
2 �([(+
= −Cyl
2Cos 2�([+ 1(− 2) × 180°] −
Cyl
2Sin 2�([+ 1(− 2) × 45°]) + �Sph +
La décomposition de la matrice de Long proposéepar Deal et Toop conduit finalement à décomposerle sphérocylindre en trois lentilles indépendantes :une lentille sphérique d’une puissance égale àl’équivalent sphérique et deux cylindres croisés deJackson.10 On retrouve finalement les trois termesde la matrice de Thibos (Fig. 37C) :65,66
• une lentille sphérique de puissance égale àl’équivalent sphérique ;
• un cylindre croisé de Jackson (J0) d’axes à
0°/90°. J0 = −Cyl
2× Cos� axe × 2 �
• un cylindre croisé de Jackson (J45) d’axes
45°/135°. J45 = −Cyl
2× Sin� axe × 2 �
La principale difficulté est d’exprimer l’astigma-tisme régulier à l’aide de deux variables non direc-
tionnelles. La plupart des auteurs propose la mêmesolution. L’astigmatisme est représenté par un cy-lindre croisé de Jackson après doublement de l’axe.Le cylindre croisé de Jackson est ensuite décom-posé en deux composés par une simple projectionsur deux axes orthogonaux (abscisse et ordonnée).On obtient donc finalement deux cylindres croisésde Jackson (J0, J45) ayant respectivement des axesà 0°/90° et 45°/135°.65,66 La décomposition a per-mit de s’affranchir des données directionnelles. Eneffet, les axes des deux cylindres croisés de Jackson(c’est-à-dire des quatre cylindres) sont non infor-matifs car imposés quel que soit l’astigmatisme.Naeser a une approche identique puisqu’il utilisepour définir le sphérocylindre ses deux valeurs po-laires, qu’il multiplie par un facteur 0,5 et l’équi-valent sphérique [1/2 KP(90), 1/2 KP(45), EqSph].46,47
150 O. Touzeau et al.

Cette décomposition du sphérocylindre est trèsintéressante, car les trois variables qui défissent lesaxes du graphique ont cette fois une significationoptique compréhensible (Fig. 37). La composantesphérique représentée par l’équivalent sphériqueest sur un axe orthogonal par rapport au plan del’astigmatisme. Cette orthogonalité est logique,car elle traduit l’indépendance entre la compo-sante sphérique et la composante astigmate. L’in-térêt de cet espace « dioptrique » tridimensionnelest de parfaitement définir chaque sphérocylindrepar un point unique (x, y, z). À chaque sphérocylin-dre correspond un point unique dans l’espace, etinversement à chaque point de l’espace correspondun sphérocylindre unique. Cette expression dusphérocylindre est séduisante sur le plan graphiqueet représente une économie importante dans lagestion des données. L’exploitation statistique desdonnées peut se faire à l’aide d’analyses multiva-riées parfois fort complexes.46,66 Une analyse uni-variée du vecteur de puissance est possible et suf-fisante dans de nombreuses situations. On utilisedans ce cas la norme du vecteur sphérocylindrique.La norme du vecteur sphérocylindrique (ou la dis-tance par rapport à l’origine du point définissant lesphérocylindre) s’écrit :
Norme
=��−Cyl
2Cos (axe × 2�2
+�−Cyl
2Sin (axe × 2)�2
+ (Eq Sph)2
=�� Cyl
2 �2
+ (Eq Sph)2
La norme est indépendante de l’axe de l’astig-matisme et est différente de la norme de la matricede Long. Pour de nombreux auteurs (Raasch, Thi-bos, Naeser...), cette norme a une significationoptique car elle quantifie la défocalisation sphéro-cylindrique46,47,54,65,66 (Fig. 38). Raasch a montréque cette norme présentait une forte corrélationavec l’acuité visuelle non corrigée (r2 = 0,92).54
Analyse de l’astigmatisme
Calcul de l’astigmatisme moyen
Calcul de la moyenne du cylindreL’amplitude de l’astigmatisme peut être analyséede manière similaire à celle de l’équivalent sphéri-que, mais dans ce cas l’information concernantl’axe est perdue. Dans certains cas, la connaissancedu cylindre peut être suffisante pour analyser l’as-tigmatisme. C’est par exemple le cas de l’astigma-tisme postkératoplastie. L’acuité visuelle des gref-
fons clairs sans pathologie extracornéenne est biencorrélée à la valeur du cylindre.68 Dans d’autrescas, l’analyse de l’astigmatisme nécessite la priseen compte de l’axe (influence d’une incision cor-néenne sur l’astigmatisme, évaluation d’une procé-dure en chirurgie réfractive cornéenne par exem-ple).
Figure 38 Évolution de la réfraction subjective d’un œil présen-tant un kératocône.A. Visualisation de l’astigmatisme à l’aide du graphique deHolladay. Chaque anneau représente une puissance de deuxdioptries (2 D pour l’anneau interne, 8 D pour l’anneau externe).B. Représentation du sphérocylindre dans un espace dioptrique3 D à l’aide des trois coordonnées de Thibos. On visualise dansl’enfance l’évolution d’une myopie axiale banale avec un légerastigmatisme direct (variation isolée de la composante sphéri-que). À la fin de l’adolescence, l’astigmatisme évolue rapide-ment et devient majeur (kératocône). On observe une augmen-tation importante de la composante oblique avec unemyopisation.
151Astigmatisme : analyses mathématiques et représentations graphiques

Calcul de la moyenne de l’axeL’axe étant une donnée directionnelle, calculer lamoyenne arithmétique des axes n’a aucun sens.24
La moyenne de l’axe n’est d’ailleurs pas une don-née pertinente car elle tend invariablement vers90° quelle que soit la population étudiée (Fig. 39).Ainsi, si on n’incluait que des yeux présentant unastigmatisme indirect (axes proches de 0° ou 180°en cylindre positif), la moyenne de l’axe seraitvoisine de 90°, comme le serait la moyenne del’axe d’une population d’yeux présentant un astig-matisme direct (axes proches de 90°).
Calcul de l’astigmatisme moyenCalculer de façon indépendante la moyenne ducylindre et la moyenne de l’axe a l’avantage de lasimplicité. Tous les cylindres et tous les axes ont lemême poids dans le calcul des deux moyennes. Ils’agit d’une méthode purement mathématique quiignore totalement les propriétés optiques. L’astig-matisme moyen ne peut pas être calculé par lamoyenne du cylindre et la moyenne de l’axe commel’illustre l’exemple ci-dessous :Quelle est la moyenne des deux sphérocylindres
suivants ?
0 (+4) × 15° et 0 (+2) × 165°
Le calcul des moyennes réalisé de façon indépen-dante pour la sphère, le cylindre et l’axe donne lesrésultats suivants :
• moyenne des sphères : 0,00 D• moyenne des cylindres : +3,00 D• moyenne des axes : 90°• moyenne des équivalents sphériques : +1,50 DLa moyenne de l’axe est complètement aber-
rante et n’a pas de sens d’un point de vue optique.Le cylindre et l’axe sont intimement liés et il n’estpas légitime d’analyser séparément le cylindre etl’axe. Pour calculer véritablement l’astigmatismemoyen et non pas seulement la moyenne du cylin-dre ou la moyenne de l’axe, il est nécessaire d’uti-liser les expressions « non polaires » de l’astigma-tisme. Le principe de calcul est simple et comportetrois étapes.
Expression du (sphéro-)cylindre en une forme nonpolaireLes données polaires du cylindre (ou du sphérocy-lindre) sont transformées en coordonnées carté-siennes ou en matrice.
Réalisation des statistiquesLes statistiques (calcul d’une moyenne ici) sontréalisées de façon indépendante pour chacune descoordonnées cartésiennes ou pour chacun des ter-mes de la matrice.
Transformation du résultat en forme polaireLe résultat (astigmatisme moyen ici) exprimé encoordonnées cartésiennes ou le sphérocylindremoyen exprimé sous forme matricielle sont conver-tis en forme polaire : sphère, cylindre et axe.Toutes méthodes qui ont une écriture matricielle
peuvent facilement être utilisées pour le calcul dusphérocylindre moyen.10,16,31,36,46,53,66 Les princi-pales méthodes pour calculer un sphérocylindremoyen sont reproduites dans l’encadré 1. Dansl’exemple précédent, le sphérocylindre moyen apour valeur : +0,18 (+2,64°) × 5,5° .Ce qui donne unéquivalent sphérique de +1,50 D. On constate quela moyenne de l’équivalent sphérique est identiquequelle que soit la méthode de calcul (expressionpolaire ou non). Il est donc légitime d’analyserl’équivalent sphérique de façon isolée sans consi-dérer le sphérocylindre dans son ensemble. L’inté-rêt des expressions « non polaires » concerne l’ana-lyse de l’astigmatisme.30,56,65 Ces méthodes ontl’avantage de prendre en compte les propriétésoptiques de l’astigmatisme et en particulier de nepas dissocier le cylindre et l’axe. Les exemples dela Figure 40 illustrent à l’aide du graphique d’Hol-laday, la modalité de calcul du cylindre moyen etde l’axe moyen par ces méthodes.24,25
Il existe une pondération de l’axe par le cylin-dre. Les axes associés à un cylindre de puissance
Figure 39 Astigmatisme moyen d’une population (exemple). Lesdonnées de l’astigmatisme de 25 greffes de cornée ont étéreprésentées sur ce graphique de Holladay. Chaque anneaureprésente une valeur de 2 D. La moyenne des cylindres est de4,03 D et la moyenne des axes est de 91° (point vert). L’astig-matisme moyen est 1,52 D à 176° (point rouge). La valeur del’axe moyen de cette population semble plus réaliste que lavaleur de la moyenne des axes.
152 O. Touzeau et al.

Encadré 1
Calcul du sphérocylindre moyen
Cas général et exemple numérique de deux sphérocylindres 0 (+4) × 15° et 0 (+2) × 165°
Coordonnées cartésiennesCas général• Transformation de l’écriture polaire (cylindre, axe) en coordonnées cartésiennes (xi, yi)xi = Cylindrei × Cos (axei × 2)
yi = Cylindrei × Sin (axei × 2)
• Calcul de la moyenne des coordonnées xi (X ) et de la moyenne des coordonnées yi (Y )
X =1
N× �
i=1
n
Cyli × Cos(axei × 2)
Y =1
N× �
i=1
n
Cyli × Sin(axei × 2)
• Conversion des coordonnées rectangulaires (X,Y) en écriture polaire (cylindre et axe)
Cylindre moyen = �� X �2
+ � Y �2
Axe moyen =1
2× ArcTg� Y
X � + C
avec
C = 0° si X et Y > 0
C = +90° si X < 0
C = +180° si X > 0 et Y < 0
Exemple numérique
X =1
2× [4 × Cos(15 × 2) + 2 × Cos(165 × 2)] =
1
2× [3, 46 + 1, 73] ≈ 2, 60
Y =1
2× [4 × Sin(15 × 2) + 2 × Sin(165 × 2)] =
1
2× [2 + (− 1)] = 0, 50
Cylindre moyen = �(2, 60)2 + (0, 50)2 ≈ 2, 65 D
Axe moyen =1
2× ArcTg� 0, 50
2, 60 � + 0 ≈ 5, 4 °
Matrice de LongCas général
Écriture de la forme polaire en matrice de Long � f 11 f 12
f 21 f 22�
Calcul de la moyenne pour chacun des 4 termes de la matrice F =1
n× � i=1
n Fi = � f 11¯ f 12
¯
f 21¯ f 22
¯ �
153Astigmatisme : analyses mathématiques et représentations graphiques

Conversion en écriture polaire après calcul de la trace T et du déterminant D:
Cylindre = �T2 − 4D
Équivalent sphérique =T
2
Sphère =T + Cylindre
2= Équivalent sphérique −
Cylindre
2
Axe = ArcTg� Sphère − f 11
f 12�
Exemple numérique
Les deux matrices initiales � 0,27 −1,00
−1,00 3,73 � et � 0,13 0,50
0,50 1,87 �La matrice moyenne � 0,20 −0,25
−0,25 2,80 �Trace = 3,00 ; Déterminant D = 0,50
Cylindre = �(3, 00)2 − 4 × (0, 50) = �7 ≈ 2, 64D
Équivalent sphérique =0, 20 + 2, 80
2= 1, 50 D
Sphère =1
2× (3, 00 − 2, 64) ≈ 0, 18 D
Axe = ArcTg� 0, 18 − 0, 20
− 0, 25 � ≈ 5, 5 °
Matrice de ThibosCas général• Calcul des trois termes de la matrice pour chaque observation � Eq Sph J0 J45 � i
• Calcul de la matrice moyenne F =1
n× � i=1
n Fi = � Eq Sph J0¯ J45
¯ �
• Conversion en écriture polaire des deux termes J0 et J45 de la matrice moyenne :
Cylindre moyen = 2 × J = 2 × �J0¯ 2 + J45
¯ 2
Axe moyen =
ArcTg� J45¯
J0¯ �
2+ C avec C = 0 si J0 < 0 et C = + 90 ° si J0 > 0
avec pour un axe en notation « cylindre positif »
C = 0 si J0 < 0
C = +90° si J0 > 0
(les valeurs de C sont à permuter en cas de notation « cylindre négatif »)Exemple numérique• Les deux matrices initiales [2,00 –1,73 –1,00] et [1,00 –0,87 0,50]• La matrice moyenne [1,50 –1,30 –0,25]
154 O. Touzeau et al.

élevée ont plus de poids dans la détermination del’axe moyen que les axes associés à un cylindre defaible puissance (Fig. 40A). Un œil dont le cylindreest nul (emmétropie ou amétropie sphérique pure)n’a aucune influence dans la détermination del’axe moyen et n’a donc pas besoin d’être éliminéavant le calcul de la moyenne. L’inclusion d’yeuxprésentant un cylindre nul pose un problème si oncalcule la moyenne de l’axe. Un cylindre nul peutavoir n’importe quel axe. Quel axe retenir pour detels yeux : 0°, 90° ou 180° ? Les expressions « nonpolaires » de l’astigmatisme évitent cette ambi-guïté (Fig. 40B). De même que la puissance descylindres influence la valeur de l’axe moyen,l’orientation des cylindres joue un rôle dans lavaleur du cylindre moyen. À l’exception du cas oùtous les cylindres auraient le même axe, l’astigma-tisme moyen calculé à l’aide des expressions « nonpolaires » est toujours inférieur à la moyenne arith-métique des cylindres. En effet, quand les cylindresne sont pas parfaitement alignés, une partie de lapuissance cylindrique se transforme en puissance
sphérique. Dans l’exemple précédent, le cylindredu sphérocylindre moyen est de 2,64 D alors que lamoyenne des deux cylindres initiaux était de3,00 D. Au contraire, la sphère du sphérocylindremoyen est de 0,18 D alors que la moyenne des deuxsphères initiales était nulle. La perte de puissancecylindrique s’est transformée en puissance sphéri-que 0,18 D (0,36/2) (Fig. 40A). Ceci est lié au faitque les deux cylindres ne sont pas parfaitementalignés. À l’extrême, deux cylindres orthogonauxde même puissance et de même signe se transfor-ment en une sphère pure avec un cylindre nul(Fig. 40C). Le calcul de la réfraction moyenne (oude l’astigmatisme moyen) à l’aide des expressions« non polaires » consiste, en fait, à calculer larésultante optique de l’ensemble des verres. Toutse passe comme si on superposait virtuellementl’ensemble des sphérocylindres (ou des cylindres).Calculer la réfraction moyenne (ou l’astigmatismemoyen) consiste en fait à répartir de façon homo-gène le verre optiquement équivalent à l’ensembledes verres sur l’ensemble des yeux. Les coordon-
Cylindre moyen = 2 × �(− 1, 30)2 + (− 0, 25)2 ≈ 2, 64 D
Axe moyen =ArcTg� − 0, 25
− 1, 30 �2
≈ 5, 5 °
Valeurs polaires de NaeserCas général• Calcul des 2 valeurs polaires KP(90) et KP(135) pour chacune des observations• Calcul des valeurs polaires moyennes :
KP(90) =1
n× �
i = 1
n
KP(90)i
KP(135) =1
n× �
i = 1
n
KP(45)i
• Conversion en écriture polaire conventionnelle
Cylindre = ± �KP(90) 2 + KP(135) 2
Axe = ArcTg� Cyl − KP(90)
KP(135) � − 90
Exemple numériqueLes 2 cylindres ont pour écriture dans le système de Naeser [KP(90), KP(135)]: [–3,46 –2,00] et [–1,73
1,00] ce qui donne comme valeur moyenne : [–2,60 –0,50]
Cylindre = ± �(− 2, 60)2 + (− 0, 50)2 ≈ �7, 00 ≈ 2, 64 D
Axe = ArcTg� 2, 64 − (− 2, 60)
(− 0, 50) � − 90 ≈ − 174, 5 ° ≈ 5, 5 °
155Astigmatisme : analyses mathématiques et représentations graphiques

Figure 40 Exemples de calculs de moyenne de la réfraction d’uncouple de cylindres. Le point vert représente la moyenne descylindres et la moyenne des axes. L’astigmatisme moyen calculépar des méthodes « non polaires » est représenté par le pointrouge. Chaque anneau du graphique correspond à 1 D.A. Pondération de l’axe par le cylindre. L’axe moyen (pointrouge) est plus proche de l’axe du cylindre le plus élevé que del’axe du cylindre le plus faible. La moyenne des axes est aber-rante (point vert).• cylindres (+4) × 15° et (+2) × 165°• moyennes des sphères : 0 D ; sphère moyenne : 0,18 D• moyennes des cylindres : 3,00 D ; cylindre moyen : 2,65 D• moyennes des axes : 90° ; axe moyen : 5,5°Comme les deux cylindres ne sont pas alignés, une partie de lapuissance cylindrique s’est transformée en puissance sphérique.B. Problème de définition de l’axe lors de l’inclusion d’yeuxemmétropes ou présentant une amétropie sphérique pure. Uncylindre nul peut avoir n’importe quel axe. Cette ambiguïté del’axe entraîne des distorsions dans le calcul de la moyenne desaxes. Avec les expressions « non polaires » le calcul de l’axemoyen ne prend en compte aucun axe quand il s’agit d’yeuxayant un cylindre nul.Sphérocylindres : Plan et 0 (+4) × 90°• moyenne des sphères : 0 D ; sphère moyenne : 0 D• moyenne des cylindres : 2,00 D ; cylindre moyen : 2,00 D• moyennes des axes : indéterminée ; axe moyen : 90°À la différence de l’axe moyen, la moyenne de l’axe est influen-cée par l’inclusion d’yeux ayant un cylindre nul pour lesquelsl’axe est indéterminé.C. Absence d’indépendance du cylindre et de la sphère lors ducalcul des moyennes. Le cylindre moyen de deux cylindresorthogonaux de même puissance est nul. La puissance cylindri-que s’est totalement transformée en puissance sphérique.• sphérocylindres 0 (+ 2) × 120° et 0 (+2) × 30°• moyenne des sphères : 0 D ; sphère moyenne : 1 D• moyenne des cylindres : 2,00 D ; cylindre moyen : 0 D• moyenne des axes : 75° ; axe moyen : indéterminéLes moyennes de la sphère, du cylindre et de l’axe qui sontcalculées de façon indépendantes ne tiennent pas compte despropriétés optiques. La sphère moyenne, le cylindre moyen etl’axe moyen représentent la résultante optique virtuelle del’ensemble des verres superposés qui serait répartis de façonhomogène sur l’ensemble des yeux.
156 O. Touzeau et al.

nées rectangulaires et les différentes matrices don-nent le même résultat d’astigmatisme moyen. Laméthode matricielle présente l’avantage de pren-dre en compte directement la composante sphéri-que en calculant sa sphère moyenne.16,30,56 Le cal-cul de la sphère moyenne est indirect avec lescoordonnées rectangulaires. La valeur de la sphèremoyenne est obtenue par soustraction du cylindremoyen à l’équivalent sphérique moyen.
Calcul d’une combinaison de sphérocylindre
Il est parfois nécessaire de connaître la puissanced’un système optique composé de l’association deplusieurs dioptres. L’association d’une lentillesphérique à un sphérocylindre ne pose pas de pro-blème pour prévoir la puissance du verre résultant.Il suffit d’additionner les composantes sphériques.La situation est beaucoup plus compliquée quandon a affaire à plusieurs cylindres. Il est difficile decalculer, à partir des seules données polaires de laréfraction, le verre « total » résultant de la combi-naison de plusieurs sphérocylindres. L’utilisationdes coordonnées cartésiennes ou des matrices per-met de résoudre facilement le problème.18,24,37,60
Addition des coordonnées cartésiennes• Cas général.1) Les cylindres sont exprimés en coordonnéescartésiennes (xi, yi)(Cylindre i) × axei →xi = Cyli × cos (axei × 2) et yi = Cyli × sin (axei× 2)
2) Addition des coordonnées cartésiennes
XTotal = �i = 1
n
xi = �i = 1
n
� Cyl × Cos(axe × 2) � i
YTotal = �i = 1
n
yi = �i = 1
n
� Cyl × Sin(axe × 2) � i
3) Les coordonnées cartésiennes du verre totalsont converties en écriture polaire :
XTotal et YTotal → (Cylindre Total) × axeTotal4) L’équivalent sphérique total est calculé paraddition des équivalents sphériques :
EqSphTotal = �i = 1
n
EqSphi
5) La sphère est finalement obtenue à partir del’équivalent sphérique et du cylindre
SphèreTotal = EqSphTotal −CylTotal
2
• Exemple numérique.Quel est le sphérocylindre résultant de la com-binaison des deux sphérocylindres suivants :
–2 (+2) × 60° et –1 (+1,25) × 120° ?
1) –2 (+2) × 60° → [–1,00 ; 1,73] et –1 (+1,25)× 120°[–0,63 ; –1,08]
2) [–1,00 ; 1,73] + [–0,63 ; –1,08] = [–1,63 ; 0,65]3) [–1,63 ; 0,65] → (+1,75) × 79,1°4) Eq sph Total = (–1,00) + (–0,37) = –1,37 D5) Sph Total = (–1,37) – (+1,75) /2] = –2,25 DLa combinaison des deux sphérocylindres corres-
pond optiquement à une sphère de -2,25 D et à uncylindre de +1,75 D à 79,1° (Fig. 41).
Addition vectorielleL’utilisation de vecteurs permet de calculer le ré-sultat optique de la combinaison de plusieurs sphé-rocylindres.57 Il suffit d’additionner les vecteursdes différents sphérocylindres après avoir procédéau doublement de l’axe. L’addition vectorielle quiaboutit au même résultat que celui obtenu par lescoordonnées rectangulaires ne présente pas d’inté-rêt particulier en dehors de l’aspect graphique(Fig 42).
Addition de matriceToutes les matrices peuvent être utilisées.
• Cas général avec la matrice de Thibos(Fig. 43).65,66
1) Les sphérocylindres sont exprimés sousforme matricielle.
Sphèrei, (Cylindrei) × axei → [Eq Sph, J0, J45]i2) Addition des matrices des sphérocylindres :
� EqSph, J0, J45 � Total = �i = 1
n
� EqSph, J0, J45 � i
3) Conversion de la matrice totale en écriturepolaire :
[Eq Sph, J0, J45] Total =→ SphèreTotal, (Cylindre Total)× axeTotal
• Exemple numérique.L’exemple précédent donnerait :1) –2 (+2) × 60° → [–1,00 ; 0,50 ; –0,87] et –1(+1,25) × 120° → [–0,37 ; 0,31 ; 0,54]
2) [–1,00 ; 0,50 ; –0,87] + [–0,37 ; 0,31 ;0,54] = [–1,37 ; 0,81 ; –0,32]
3) [–1,37 ; 0,81 ; –0,32]→ –2,25 (+1,75) × 79,1°(Fig. 39, 41).
L’utilisation des autres systèmes matriciels(Long, Naeser...) ou des fonctions sinusoïdalesaboutirait au même résultat. Quelle que soit laméthode utilisée, il s’agit d’un calcul théorique.Les dioptres sphérocylindriques sont supposés êtreoptiquement parfaits (sans astigmatisme irrégulierou aberration optique) et centrés. L’épaisseur desdioptres est supposée nulle ainsi que la distanceentre eux.
157Astigmatisme : analyses mathématiques et représentations graphiques

Calcul d’une variation de l’astigmatisme
Si une variation de l’équivalent sphérique est faci-lement quantifiable par une simple soustraction,analyser une variation de l’astigmatisme entredeux événements (pré-/postopératoire, avant/après une ablation de suture...) est plus complexeen raison du changement d’axe. Les principales
méthodes utilisables pour calculer une variationd’astigmatisme sont présentées ci-dessous avecl’exemple numérique suivant :
• astigmatisme initial : Cyl1 = + 2,5 ; axe a1 = 60°• astigmatisme final : Cyl3 = + 4,0 ; axe a3 = 35°
Quelle est la variation de l’astigmatisme ou l’as-tigmatisme induit (Cyl2, axe a2) ?
Figure 41 Addition de deux cylindres étudiés à l’aide des fonctions sinusoïdales.A. Visualisation du sphérocylindre résultant de l’addition de deux sphérocylindres.Sphérocylindre 1 : –2 (+2) × 60°Sphérocylindre 2 : –1 (+1,25) × 120°Sphérocylindre « total » : –2,25 (+1,75) × 79,1°La courbe représentant le sphérocylindre « total » est la somme des courbes des deux sphérocylindres initiaux.B. Visualisation de la composante directe/indirecte de l’astigmatisme (J0). La composante directe/indirecte de l’astigmatisme estplus importante dans le sphérocylindre « total » que dans les deux sphérocylindres initiaux. L’axe « 79 » est en effet plus proche de90 que ne le sont les axes « 60°» et « 120°».C. Visualisation de la composante oblique de l’astigmatisme (J45). La composante oblique de l’astigmatisme est plus faible dans lesphérocylindre « total » que dans les sphérocylindres initiaux. L’aspect des courbes J45 des deux sphérocylindres initiaux est inversé.Un des sphérocylindres a un axe plus proche de 45° que de 135°, tandis que l’autre sphérocylindre a un axe plus proche de 135 quede 45°.
158 O. Touzeau et al.

Soustraction simple et algébrique du cylindreLa soustraction des cylindres est la méthode decalcul la plus simple puisqu’elle ne s’intéresse pasaux axes (initial ou final) ou au changement d’axe.
Cette méthode n’est rigoureusement exacte que sil’axe demeure inchangé entre les deux examens.
Cyl2 = Cyl3 – Cyl1 = (+4) – (+2,5) = +1,5 D soit uneaugmentation de l’astigmatisme de 1,5 D.
La soustraction algébrique affecte un signe dif-férent au cylindre selon que l’astigmatisme estdirect ou indirect. Les cylindres dont l’axe estcompris entre 45° et 135° sont considérés comme
Figure 41 (suite)
Figure 42 Visualisation du cylindre résultant de l’addition dedeux cylindres sur le graphique d’Holladay. Les astigmatismesinitiaux et l’astigmatisme « total » ont été reproduits sur cegraphique d’Holladay à partir de leurs écritures polaires. L’as-tigmatisme « total » peut également être calculé par les coor-données rectangulaires, par une matrice ou en utilisant lesvecteurs. Le cylindre total est la somme vectorielle des deuxcylindres initiaux. Chacun des anneaux représente ici une puis-sance de 0,5 dioptrie.Cylindre 1 : (+2,00) × 60°Cylindre 2 : (+1,25) × 120°Cylindre total : (+1,75) × 79,1°
Figure 43 Visualisation des composantes directe/indirecte etoblique de l’astigmatisme dans l’addition de deux cylindres. Lacomposante directe/indirecte de l’astigmatisme (J0) est plusimportante dans l’astigmatisme total que dans les deux astigma-tismes initiaux. L’axe de l’astigmatisme total (79,1°) est plusproche de 90° que ne le sont les axes initiaux (60° et 120°). Lacomposante oblique de l’astigmatisme total diminue car l’axes’éloigne de 45° et 135°.
159Astigmatisme : analyses mathématiques et représentations graphiques

positifs et ceux dont l’axe est compris entre 0° et45° ou entre 135° et 180° sont négatifs. Cetteméthode ne peut donner des résultats acceptablesque si les deux axes sont très proches de 0° ou 90°.
Cyl2 = Cyl3 – Cyl1 = (–4) – (+2,5) = -6,5 D
Méthodes vectoriellesCes méthodes sont qualifiées de « vectorielles » carelles ont en commun d’utiliser directement ou indi-rectement le concept de vecteur d’astigmatisme.L’ensemble de ces méthodes a pour objectif decalculer un vecteur à partir de deux vecteurs
connus. Si V1W est le vecteur initial, V3
W le vecteur
final, il faut trouver le vecteur V2W représentant la
variation de l’astigmatisme (ou l’astigmatisme in-
duit) tel queV1W + V2
W = V3W . (Fig. 44).35,49,58 L’astig-
matisme induit est souvent appelé « SIRC » (Surgi-cal Induced Refractive Change) car ces méthodessont surtout utilisées pour quantifier l’astigma-tisme postchirurgical (phacoexérèse manuelle ini-tialement puis phacoémulsification et chirurgie ré-fractive cornéenne actuellement). Différentesméthodes vectorielles sont possibles pour calculerle vecteur de l’astigmatisme induit. Toutes les mé-thodes qui reposent sur les principes décrits parStokes (en particulier le doublement des angles)aboutissent aux même résultats. Le vecteur induitpeut être calculé à partir des coordonnées rectan-gulaires (x, y) et des angles formés par les vecteursinitial et final, en utilisant différentes relationsgéométriques (théorème de Pythagore) ou trigono-métriques (loi des sinus et des cosinus) (Fig. 44).
Méthode graphiqueLa méthode graphique développée par Stokes est laplus ancienne des méthodes (1849).62 Un parallélo-gramme est formé en utilisant les données de l’as-tigmatisme (cylindre et axe). Les deux puissancesdes cylindres exprimées en dioptries forment lesdeux côtés adjacents d’un parallélogramme. L’an-gle formé par les vecteurs doit représenter le dou-ble de l’axe de l’astigmatisme. Le cylindre résul-tant qui est la somme vectorielle des deux vecteursest représenté par la diagonale du parallélogramme(Fig 44). Cette méthode fastidieuse n’est plus em-ployée mais conserve un intérêt pédagogique.
Méthodes des coordonnées rectangulairesCette méthode utilise les coordonnées rectangulai-res des vecteurs V1 (X1, Y1) et V3 (X3, Y3).
X1 = Cyl1 × cos(a1 × 2) ; Y1 = Cyl1 × sin(a1 × 2)
X3 = Cyl3 × cos(a3 × 2) ; Y3 = Cyl3 × sin(a3 × 2)
Les coordonnées rectangulaires du vecteur V2(X2, Y2) sont calculées par une soustraction descoordonnées des vecteurs V3 et V1 (Fig. 44) :
X2 = X3 – X1 et Y2 = Y3 – Y1
Les coordonnées polaires de V2 (cylindre Cyl2, etl’axe a2) sont calculées par application du théo-rème de Pythagore.
Cyl2 = � � � Cyl3 × Cos(a3 × 2) � − � Cyl1 × Cos(a1 × 2) � � 2 + � � Cyl3 × Sin(a3 × 2) � − � Cyl1 × Sin(a1 × 2) � �
Axe a2 = 0,5 × ArcTg� � Cyl3 × Sin(a3 × 2) � − � Cyl1× Sin(a1 × 2) � �
� � Cyl3 × Cos(a3 × 2) � − � Cyl1× Cos(a1 × 2) � �- Exemple numérique.Astigmatisme initial : Cyl1 = + 2,5 ; Axe a1 = 60°Astigmatisme final : Cyl3 = + 4 ; Axe a3 = 35°Quel est l’astigmatisme induit (Cyl2, Axe a2) ?
Figure 44 Calcul d’une variation d’astigmatisme par les coor-données rectangulaires.Astigmatisme initial (Vecteur 1) = +2,5 D à 60°Astigmatisme final (Vecteur 3) = +4,0 D à 35°Variation d’astigmatisme (ou astigmatisme induit) (Vecteur2) = +3,06 D à 15,7°La variation de l’astigmatisme se calcule par soustraction descoordonnées cartésiennes des astigmatismes final et initialaprès doublement des angles : X2 = X3 – X1 et Y2 = Y3 – Y1La variation d’astigmatisme, l’astigmatisme initial et l’astigma-tisme final sont liés entre eux par la relation vectorielle sui-
vante : V1W + V2
W = V3W
Les différentes méthodes vectorielles consistent à calculer le
vecteur de l’astigmatisme induit � V2W � à partir du vecteur de
l’astigmatisme initial � V1W � et du vecteur de l’astigmatisme final
� V3W �.
160 O. Touzeau et al.

Cyl2 = � � � 4 × Cos(2 × 35) � − � 2,5 × Cos(2 × 60) � � 2 + � � 4 × Sin(2 × 35) � − � 2,5 × Sin(2 × 60) � � 2
= �� 2, 618 �2 + � 1, 539 �2 = �9, 393 ≈ 3, 06D
Axe �2 = 0,5 × ArcTg� � 4 × Sin(35 × 2) � − � 2,5 × Sin(60 × 2) � �
� � 4 × Cos(35 × 2) � − � 2,5 × Cos(60 × 2) � �= 0,5 × ArcTg
� 1,593 �� 2,618 �
≈ 15,7 °
L’astigmatisme induit est de 3,06 D à 15,7°.Alpins (1993) a développé cette méthode en y
ajoutant les notions d’astigmatisme cible (targetinduced astigmatism vector), une quantification del’erreur pour l’angle et le cylindre, une quantifica-tion de l’effet d’aplatissement (flattening effect)et un indice de succès.1,2,3,4
Holladay (1992) propose une méthode qui esttrès voisine quoique plus compliquée, puisqu’unepermutation des données (initiale et finale) peutêtre nécessaire selon la valeur des angles respec-tifs. Cette méthode est également très complète etelle intègre aussi la variation sphérique et l’effetde couple.22
Loi des sinus et cosinus
Cette méthode préconisée par Naylor (1968) pré-sente l’avantage d’éviter le passage par les coor-données rectangulaires.48 La loi des cosinus permetde déduire la longueur d’un côté d’un triangle àpartir de l’angle opposé et de la longueur des deuxautres côtés.
Cyl2 = �Cyl12+ Cyl3
2− (2 × Cyl1× Cyl3 × Cos(2 × ��1− �3�))
La loi des sinus (rapport longueur d’un côté /sinde l’angle opposé = constante) permet le calcul del’angle.
Axe �2= 90 ° + �1 − 0,5 × ArcSin� Cyl3 × Sin� 2 × ��1− �3� � �
Cyl2
si �3 > �1
= �3 − 0,5 × ArcSin� Cyl1 × Sin� 2 × ��1− �3� � �
Cyl2
si �1 > �3
L’exemple précédent donnerait :
Cyl2 = �(2,5)2+ (4)2 − (2 × 2,5 × 4 × Cos(2 × �60 − 35�)) ≈ �9,39 ≈ 3,06D
Axe2 = 35 − 0,5 × ArcSin� 2,5 × Sin� 2 × �60 − 35� � �
3,06= 35 − (0,5 × 38,7) ≈ 15,7 °
Méthodes des matrices
Les matrices permettent de calculer facilement lavariation de la réfraction entre deux événements. Il
suffit de soustraire la matrice initiale de la matricefinale et puis de convertir la nouvelle matrice obte-nue pour obtenir directement les variations de lasphère, du cylindre et de l’axe.
Matrice de LongOn obtient en utilisant la matrice de Long :
� f 11 f 12
f 21 f 22�
Variation
= � f 11 f 12
f 21 f 22�
Final
− � f 11 f 12
f 21 f 22�
Initial
L’exemple précédent donnerait les matrices suivantes :
�− 0, 559 − 0, 797
− 0, 797 2, 059 �Variation
= � 1, 316 − 1, 879
− 1, 879 2, 684 �Final
− � 1, 875 − 1, 083
− 1, 083 0, 625 �Initial
d’où on obtient le cylindre et l’axe du vecteur induit :
Cyl2 = �(− 0, 559 + 2, 059)2 − 4 � ((− 0, 559) × 2, 059) − ((− 0, 797) × (− 0, 797) × (0, 797)) �≈ � (1, 5)2 − 4(− 1, 786) ≈ �9, 394 ≈ 3, 06 D
161Astigmatisme : analyses mathématiques et représentations graphiques

Axe �2 = ArcTg� (0, 5 × (1, 5 − 3, 06)) − (− 0, 559)
− 0, 797 � ≈ ArcTg(0, 281) ≈ 15, 7 °
Matrice de ThibosLe calcul avec la matrice de Thibos est analogue àcelui réalisé précédemment avec la matrice deLong.64,66
[Eq Sph ; J0 ; J45]Variation = [Eq Sph ; J0 ; J45] Final – [EqSph ; J0 ; J45]Initial
[0,75 ; –1,31 ; –0,80] Variation = [2,00 ; –0,68 ;–1,88]Final – [1,25 ; 0,63 ; –1,08]Initial
Cyl2 = 2 × �(− 1, 31)2 + (− 0, 80)2 ≈ 2 × �2, 36 ≈ 3, 06D
Axe �2 =ArcTg� − 0, 80
− 1, 31 �2
≈31, 4
2≈ 15, 7 °
L’astigmatisme induit est de 3,06 D à 15,7°,c’est-à-dire le même résultat qu’avec les méthodesvectorielles.
Valeurs polaires de NaeserL’astigmatisme initial et l’astigmatisme final sontexprimés à l’aide des deux valeurs polaires deNaeser KP(90) et KP(135) soit :
• KP(90)Initial et KP(135)Initial pour l’astigmatismeinitial ;
• KP(90)Final et KP(135)Final pour l’astigmatismefinal.Pour chaque valeur polaire de Naeser, la varia-
tion est calculée de cette façon :
D KP(90) = KP(90)Final – KP(90)Initial
D KP(135) = KP(135)Final – KP(135)InitialCes deux variations de valeurs polaires permet-
tent le calcul du cylindre puis de l’axe à l’aide desdeux relations suivantes :
Cylindre = ± �DKP(90)2 + DKP(135)2
Axe = ArcTg� Cyl − DKP(90)
DKP(135) � − 90
- Exemple numérique.
D KP(90) = (–1,37) – (1,25) = –2,62
D KP(135) = (–3,76) – (–2,17) = –1,59
Cylindre = ± �(− 2, 62)2 + (− 1, 59)2 ≈ �9, 39 ≈ 3, 07D
Axe = ArcTg� 3, 07 − (− 2, 62)
(− 1, 59) � − 90 ≈
ArcTg(− 3, 58)
− 90 ≈ − 74, 4 − 90 ≈ − 164, 3 ≈ 15, 7 °
Dans la dernière version de sa méthode, Naeserdécompose l’astigmatisme non plus obligatoire-ment selon les axes 90° et 135°, mais selon un axequelconque X et l’axe X + 45°. La valeur polaireméridionale (AKP) et la valeur polaire oblique [AKP(+45)] sont définies de cette façon :
AKP = Cyl × [(Sin2 (a + 90 –X) – Cos2 (a + 90 –X)]
AKP(+45) = Cyl × [(Sin2 (a + 45 –X) – Cos2 (a + 45 –X)]
a est l’axe en cylindre positif (méridien le pluspuissant) et X le méridien de référence choisi.Les valeurs polaires AKP et AKP(+45) présentent
des avantages par rapport aux valeurs polairesKP(90) et KP(135). En effet, il peut être intéressantpour analyser une variation d’astigmatisme de choi-sir comme méridien de référence X l’axe a del’astigmatisme initial (méridien le plus bombé).Dans ce cas, le couple des valeurs initiales sesimplifie. La valeur polaire méridionale initiale(AKPinitial) est toujours égale au cylindre initial,tandis que la valeur polaire oblique initiale(AKP(+45)initial) est toujours égale à 0.
AKPinitial = Cylinitial
AKP(+45)initial = 0
Les valeurs polaires finales se calculent à l’aidedes formules suivantes :
AKPfinal = Cylfinal × {Sin2 (axefinal+90) – axeinitial]
– Cos2 [(axefinal+90) – axeinitial]}
AKP(+45) final = Cylfinal × {Sin2 (axefinal+45)
– axeinitial] – Cos2 [(axefinal+45) – axeinitial]}
Le calcul de l’astigmatisme induit se fait commeprécédemment par le calcul de la variation desdeux valeurs polaires :
DAKP = AKPfinal – AKPinitial
DAKP(+45) = AKP(+45)final – AKP(+45)initialL’intérêt de la décomposition en deux valeurs
polaires AKP et AKP(+45) est que la variation desdeux valeurs polaires a une signification clinique.La variation de la valeur polaire méridionale (DAKP)reflète la variation de puissance du méridien initialle plus bombé. Il peut s’agir du méridien chirurgicaldans le cas d’une chirurgie de l’astigmatisme (inci-sion relaxante : kératotomie arciforme ou T-cuts).Dans ce cas, la variation de la valeur polaire méri-dionale (DAKP) quantifie l’efficacité du geste chi-rurgical. Une DAKP positive signifie un bombementdu méridien bombé préopératoire tandis qu’une
162 O. Touzeau et al.

DAKP négative correspond à un aplatissement de ceméridien.La variation de la valeur polaire oblique
DAKP(+45) indique le degré de rotation induit. Unevaleur positive ou négative de la DAKP(+45) signifierespectivement une rotation antihoraire ou ho-raire.Le cylindre induit et la variation de l’axe par
rapport à l’axe initial se calcule à partir des formu-les suivantes :
Cyl2 = ± �DAKP2+ DAKP(+ 45)2
Variation de l’axe par rapport à l’axe :
�1 = ArcTg� Cyl − DAKP
DAKP(+ 45) � − 90
L’exemple numérique :
AKPinitial = 2,5
AKP(+45)initial = 0
AKPfinal = 4×{Sin2 (35 + 90) – 60] – Cos2 [(35 + 90) – 60] }
≈ 2,57
AKP(+45)final = 4×{Sin2 (35+45) – 60] – Cos2 [( 35 + 45)
– 60]} ≈ -3,06
DAKP = 2,57 – 2,50 ≈ 0,07 (la puissance du méridieninitialement bombé est quasi inchangée)
DAKP(+45) ≈ –3,06 (rotation horaire de l’axe)
Cyl2 ± �0, 072 + (− 3, 06)2 ≈ 3, 06D
Variation de l’axe = ArcTg� 3, 06 − 0, 07
− 3, 06 � − 90 ≈ − 134, 3 °
L’astigmatisme induit est de 3,06 D avec unerotation horaire de 134,3°. Naeser analyse l’astig-matisme avec le contraxe qui correspond à l’axe±90°. En soustrayant la valeur 134,3 à l’axe initial+90° on trouve comme pour les autres méthodes,que l’astigmatisme induit à un axe égal à 15,7°(60 + 90 – 134,3).
Fonctions sinusoïdalesLa variation de l’astigmatisme (ou l’astigmatismeinduit) peut être décrite par une fonction sinusoï-dale directement obtenue par la soustraction desfonctions décrivant l’astigmatisme final et initial(Fig. 45). Cette méthode ne présente un intérêt parrapport aux autres méthodes que si l’on veut s’af-franchir du modèle sphérocylindrique pour analyserl’astigmatisme irrégulier.
Autres méthodesDe nombreuses autres méthodes existent pour cal-culer une variation d’astigmatisme. Leurs résultatssont différents des méthodes précédemment citéescar elles ne reposent pas sur les principes énoncéspar Stokes.62 C’est le cas par exemple de la mé-thode de Cravy qui ne double pas les angles, et desversions précédentes des méthodes de Naeser quiutilisaient deux valeurs polaires séparées de 90° oudes fonctions « |sin| et |cos| » au lieu des fonc-tions « sin2 et cos2 ».9
Figure 45 Calcul d’une variation de l’astigmatisme par soustraction de fonctions sinusoïdales. La soustraction du sphérocylindreinitial au sphérocylindre final permet de calculer la variation de l’astigmatisme. La composante sphérique est également analysée.
163Astigmatisme : analyses mathématiques et représentations graphiques

Intérêts et limites des différentes méthodesL’analyse d’une variation d’astigmatisme entredeux événements reste toujours controversée,comme le montre la multiplication des méthodesde calcul et des publications sur le sujet ces derniè-res années. Dans une simulation comparant septméthodes différentes, Toulemont a montréqu’aucune des méthodes n’était linéaire.67 Ainsi,une modification de la différence de cylindre entreles deux événements à variation d’axe constante neproduit pas une modification proportionnelle ducylindre induit. De plus, il existe souvent des résul-tats fort différents entre certaines méthodes (Ta-bleau 3).Quelle méthode choisir ? La méthode graphique
(Stokes), les méthodes vectorielles utilisant lescoordonnées rectangulaires (Alpins, Holladay) ou laloi des sinus et cosinus (Naylor), les matrices deLong ou Thibos et la méthode de Naeser utilisantdeux valeurs polaires séparées de 45° ont au moinsl’avantage d’être cohérentes entre elles puisqu’el-les aboutissent par des moyens différents aux mê-mes valeurs d’astigmatisme induit.De nombreuses études ont analysé l’astigma-
tisme chirurgicalement induit par une chirurgie dusegment antérieur (EEC, PKE, KR, Excimer et La-sik). La plupart de ces études se contente de com-parer les différentes méthodes entre elles sanspouvoir réellement affirmer la supériorité d’uneméthode sur les autres. La validation des méthodespar un critère clinique indiscutable comme l’acuitévisuelle est difficile. La chirurgie de la cataracteinduit une modification de la transparence des mi-lieux rendant l’utilisation de l’acuité impossible.Dans la plupart des gestes réfractifs, la modifica-tion du cylindre est trop faible pour avoir un reten-tissement sur l’acuité visuelle. De plus, la correc-tion chirurgicale ne concerne en général passeulement le cylindre mais également la sphère.Enfin, le geste réfractif modifie profondément l’as-
phéricité de la cornée et génère des aberrationsoptiques. Les astigmatismes congénitaux impor-tants opérés sont eux aussi difficilement exploita-bles car ils sont susceptibles de s’accompagnerd’une relative amblyopie, et l’axe postopératoireest souvent inchangé en raison de la fréquentesous-correction. Nous avons récemment comparé lapertinence des différentes méthodes dans une si-tuation clinique concrète : l’astigmatisme induitpar l’ablation des sutures des greffes de cornées.70
En effet, l’ablation des sutures des greffes offreune situation privilégiée pour analyser la variationde l’astigmatisme cornéen. L’ensemble des axesest représenté (et non uniquement l’astigmatismedirect). L’amplitude de la variation de l’astigma-tisme induite par l’ablation des sutures est impor-tante aussi bien pour l’axe (de 0 a 90°) que pour lecylindre (de –10 à +10 D) alors que la variation de lasphère est peu importante. Il n’y a pas d’amblyopieliée à l’astigmatisme du fait du caractère acquis del’astigmatisme. L’astigmatisme subjectif est le fac-teur présentant la plus forte corrélation avecl’acuité visuelle corrigée chez les patients greffés.La réfraction subjective de 200 greffons clairs neprésentant aucune cause de baisse d’acuité visuelleextracornéenne a été mesurée avant et aprèsl’ablation des sutures.70 La variation de l’acuitévisuelle corrigée (LogMAR) a été corrélée à la varia-tion de l’astigmatisme calculée par différentes mé-thodes. Curieusement, la variation de l’astigma-tisme calculée par la soustraction des cylindres (enignorant l’axe) présente la plus forte corrélationavec la variation d’acuité visuelle corrigée(rs = 0,66 ; p < 0,001). Toutes les autres méthodes,en particulier les méthodes vectorielles, présen-tent des coefficients de corrélation plus faibles (rsentre 0,53 et 0,59 ; p < 0,001). Les différentesméthodes utilisées pour analyser une variation del’astigmatisme pourraient, dans certains cas aumoins, déformer la réalité.67,70
Tableau 3 Comparaison des différentes méthodes pour calculer une variation d’astigmatisme. Exemple numérique : astigma-tisme initial +2,50 à 60° et astigmatisme final +4,00 à 35°.
Méthodes Astigmatisme induitCylindre Axe
Soustraction simple des cylindres +1,50 D -Soustraction algébrique –6,50 D -Méthodes vectorielles Graphique (Stokes) } 3,06 D 15,7°
Coordonnées rectangulaires (Holladay, Alpins)Loi des sinus et cosinus (Naylor)
Matrice (Long, Thibos...)Naeser 1997Cravy +2,03 DRussell +2,89 D -Naeser 1990 +2,64 D
164 O. Touzeau et al.

Autres analyses de l’astigmatisme
Les méthodes « non polaires » permettent nonseulement d’étudier la réfraction d’une populationmais également de réaliser des analyses de l’astig-matisme plus approfondies, qui seraient difficiles àpartir de la seule écriture polaire (cylindre et axe).
Analyse de l’axe de l’astigmatisme
Outre leurs intérêts pour visualiser les données, lesméthodes « non polaires » permettent facilementd’analyser une donnée directionnelle telle quel’axe de l’astigmatisme. Les coefficients issus de ladécomposition de l’astigmatisme en une partie
Figure 46 Visualisation de l’influence de l’âge sur l’axe de l’astigmatisme subjectif. Astigmatisme subjectif de deux séries de 50 yeuxde 50 patients présentant un astigmatisme idiopathique. À gauche, les jeunes patients (< 30 ans), à droite les patients âgés (> 70 ans).A. Visualisation de l’astigmatisme à l’aide du graphique de Holladay. L’astigmatisme direct est nettement majoritaire chez les jeunes(astigmatisme moyen = 0,68 D à 92), tandis que l’astigmatisme indirect prédomine chez les patients âgés (astigmatismemoyen = 0,28 D à 177). Chaque anneau représente une puissance cylindrique de 0,50 D (0,50 D pour l’anneau interne et 2 D pourl’anneau externe).B. Décomposition de l’astigmatisme en deux cylindres croisés (J0 et J45) séparés de 45 (système de Thibos). Le cylindre croisé J0 d’axe0° et 90° représente les composantes directe et indirecte de l’astigmatisme. Le cylindre croisé J45 d’axe 45° et 135° représente lacomposante oblique de l’astigmatisme. On visualise aisément la prédominance de l’astigmatisme direct chez les jeunes et lafréquence de l’astigmatisme indirect des patients âgés. L’aspect graphique est similaire au graphique de Holladay (multiplication parun facteur –0,5).
165Astigmatisme : analyses mathématiques et représentations graphiques

Tableau 4 Relation entre le type d’astigmatisme et les coefficients des principales méthodes d’analyse d’astigmatisme. Lescoordonnées cartésiennes, la méthode de Thibos et la méthode de Naeser analysent l’astigmatisme de façon similaire par deuxcoefficients. L’un des coefficients (X, J0 ou KP(90)) quantifie la composante directe ou indirecte, tandis que l’autre coefficient (Y,J45 ou KP(135)) reflète la composante oblique de l’astigmatisme. L’importance relative de ces deux coefficients (en valeurabsolue) indique la composante de l’astigmatisme qui prédomine. Dans le cas où la composante directe/indirecte domine, le signedu coefficient indique si l’astigmatisme est de type direct ou de type indirect. Pour les valeurs 0°, 90°, 45° et 135°, l’un des deuxcoefficients est égal à 0.
Type d’astigmatisme Coordonnées cartésiennes Thibos NaeserDirect (90°) |X| > |Y| et X négatif |J0| > |J45| et J0 positif |KP(90)| > |KP(135)| et KP(90) positifIndirect (0°) |X| > |Y| et X positif | J0| > |J45| et J0 négatif |KP(90)| > |KP(135)| et KP(90) négatifOblique (45° ou 135°) |Y| > |X| |J45| > |J0| |KP(135)| > |KP(90)|
Figure 47 Analyse de l’astigmatisme moyen d’une population par deux fonctions sinusoïdales. L’astigmatisme est décomposé en unecomposante directe ou indirecte J0 (cylindre croisé à 0° et 90°) et une composante oblique J45 (cylindre croisé à 45° et 135°).L’ordonnée représente l’amplitude du cylindre de l’astigmatisme moyen et non l’amplitude de la moyenne des cylindres.A. Astigmatisme idiopathique. La composante oblique de l’astigmatisme est négligeable. L’astigmatisme moyen est de type direct(cylindre positif vers 90 ou cylindre négatif vers 0).B. Groupe kératocône. Visualisation de l’importance de la composante oblique (J45) dans l’astigmatisme des kératocônes.
166 O. Touzeau et al.

directe/indirecte et une partie oblique peuventfacilement être utilisés pour analyser l’axe(Fig. 46). C’est le cas entre autres des coordonnéescartésiennes (x, y), de la méthode de Thibos (J0 etJ45) ou de la méthode de Naeser (KP(90) etKP(135)). La valeur relative de chacun des deuxcoefficients permet de déduire si l’astigmatismeest de type direct/indirect ou de type oblique(Tableau 4). En cas d’astigmatisme de typedirect/indirect, le signe du coefficient indique letype direct ou indirect. L’importance de la compo-sante oblique de l’astigmatisme est visualisée dansle groupe kératocône, alors que cette dernière estnégligeable dans l’astigmatisme idiopathique(Fig. 47). La nette prédominance de l’astigmatismedirect (conforme à la règle) chez les jeunes etl’augmentation de fréquence de l’astigmatisme in-directe (contre la règle) chez les gens âgés sontfacilement visualisées sur un graphique (Fig. 46). Larotation de l’axe avec l’âge se traduit mathémati-quement par un changement de signe de la compo-sante directe/indirecte.
L’utilisation des coefficients permet facilementle passage à l’axe orthogonal ou à l’axe énantio-morphe (Tableaux 5, 6) (Fig. 48). Un simple chan-gement de signe de l’un ou des deux coefficient(s)est suffisant. Une rotation de l’axe de l’astigma-tisme de ± 45° (à puissance constante) correspond àune permutation des coefficients des composantesdirecte/indirecte et oblique.
Analyse de l’énantiomorphismeLe corps possède une remarquable symétrie parrapport au plan sagittal. De nombreux organes,bien que ne possédant pas de plan de symétriepropre, présentent une symétrie en miroir par rap-port à l’organe controlatéral (Fig. 49A, B). Cettesymétrie en miroir peut être qualifiée d’énantio-morphisme par analogie aux molécules (dextrogyreet lévogyre) de la chimie organique (Fig. 50). Cettesymétrie en miroir est fréquemment retrouvée auniveau de la cornée, d’où une traduction au niveaude l’astigmatisme cornéen ou réfractif. Pour l’as-tigmatisme, un énantiomorphisme parfait entre
Tableau 5 Relations entre les coordonnées cartésiennes (X,Y) et l’axe de l’astigmatisme. Les signes algébriques d’un couple decoordonnées cartésiennes X et Y déterminent quatre possibilités d’axe pour un même cylindre. L’axe orthogonal correspond à descoordonnées -X et -Y. L’énantiomorphisme (même valeur du cylindre avec une symétrie en miroir de l’axe) correspond à unecoordonnée X de même valeur avec une coordonnée Y de signe opposé. La permutation des valeurs X et Y avec un ou deuxéventuel(s) changement(s) de signe donne quatre axes qui sont séparés de 45° par rapport à l’axe de référence et à son axeénantiomorphe.
Relations géométriques par rapport àl’axe de référence
Axe Coordonnéescartésiennes
Relations entre les coordonnéescartésiennes
Exemples
X YAxe de référence � a b Référence (+2) × 80°Axe orthogonal � + 90° –a –b Changement de signe de X et Y (+2) × 170°Axe énantiomorphe 180-� a –b Changement de signe de Y (+2) × 100°Axe orthogonal à l’axe énantiomorphe 180-
� ± 90°–a b Changement de signe de X (+2) × 10°
Axes séparés de 45° de l’axe del’astigmatisme
� ± 45° b –a Permutation de X et Y avec un changementde signe
(+2) × 35°–b a (+2) × 125°
Axes séparés de 45° de l’axe énantio-morphe
180-� ± 45°
b a Permutation de X et Y sans ou avec deuxchangements de signe
(+2) × 145°–b –a (+2) × 55°
Tableau 6 Comparaison des coefficients des différentes méthodes pour des axes d’astigmatisme particuliers. Expression de huitréfractions à l’aide des coordonnées cartésiennes, des coefficients J0 et J45 de Thibos, de la matrice de Long et des valeurs polairesKP(90) et KP(135) de Naeser. L’énantiomorphisme se traduit par un coefficient Y, J45 ou KP(135) de signe contraire (cas des yeux1 et 2, 3 et 4, 5 et 6, 7 et 8).
N° Réfraction Coordonnéescartésiennes
Thibos Matrice de Long Naeser
X Y J0 J45 f11 f12 = f21 f22 KP(90) KP(135)1 (+2) × 80° –1,88 0,68 0,94 –0,34 1,94 –0,34 0,06 1,88 –0,682 (+2) × 100° –1,88 –0,68 0,94 0,34 1,94 0,34 0,06 1,88 0,683 (+2) × 10° 1,88 0,68 –0,94 –0,34 0,06 –0,34 1,94 –1,88 –0,684 (+2) × 170° 1,88 –0,68 –0,94 0,34 0,06 0,34 1,94 –1,88 0,685 (+2) × 35° 0,68 1,88 –0,34 –0,94 0,66 –0,94 1,34 –0,68 –1,886 (+2) × 145° 0,68 –1,88 –0,34 0,94 0,66 0,94 1,34 –0,68 1,887 (+2) × 55° –0,68 1,88 0,34 –0,94 1,34 –0,94 0,66 0,68 –1,888 (+2) × 125° –0,68 –1,88 0,34 0,94 1,34 0,94 0,66 0,68 1,88
167Astigmatisme : analyses mathématiques et représentations graphiques

Figure 48 Modification des composantes directe/indirecte et oblique pour les astigmatismes d’axe orthogonal ou énantiomorphe.L’énantiomorphisme se traduit par une composante directe/indirecte (J0) identique et par une composante oblique (J45) de signeopposé. L’axe orthogonal correspond à un changement de signe des deux composantes de l’astigmatisme.A. Coordonnées cartésiennes dans le système de Thibos.B. Astigmatisme de +2 D à 80.C. Axe énantiomorphe : +2 D à 100° : même composante directe/indirecte, composante oblique de signe opposé.D. Axe orthogonal : +2 D à 170° : composante directe/indirecte et composante oblique de signe opposé.
168 O. Touzeau et al.

l’œil droit et l’œil gauche correspond à une mêmepuissance de cylindre entre les deux yeux et à desaxes qui présentent une symétrie en miroir(Fig. 51A, B).Le couple de valeur d’astigmatisme « (+2) × 80° »
et « (+2) × 100° » sont énantiomorphes. De même,« (+1) × 10° » et « (+1) ×170° » sont énantiomor-phes. À l’opposé, les réfractions « (+3) × 80° » et« (+1) × 165° » sont très loin de l’énantiomor-phisme. Le plan du miroir est le plan vertical c’est-à-dire le plan sagittal. Dans les exemples précé-dents, il y a autant d’écart entre 100° et 90°qu’entre 80° et 90°. De même, 10° et 170° présen-tent le même écart par rapport à 90°. Deux axes nesont énantiomorphes que s’ils sont l’un et l’autrecomplémentaires de 180°.Un énantiomorphisme parfait :
→ cylindredroit = cylindregauche
→ axedroit + axegauche = 180°
L’énantiomorphisme peut être quantifié en utili-sant empiriquement les deux cylindres ou les deuxaxes. On comprend intuitivement que l’on s’éloignede l’énantiomorphisme parfait quand l’asymétrieentre les deux cylindres (droit et gauche) augmenteou quand la somme des axes droit et gauches’écarte de 180°. La différence entre les deuxcylindres (en valeur absolue) quantifie la part cylin-drique de l’énantiomorphisme :
|cylindreDroit – cylindreGauche|
De même, l’écart entre la somme des axes droitet gauche et 180° quantifie la part de l’énantio-morphisme liée à l’axe :
|180° – (axeDroit + axeGauche)|
Les deux relations précédentes sont imparfaitespour quantifier l’astigmatisme car elles ne pren-nent en compte qu’un aspect de l’astigmatisme,l’aspect qualitatif (directionnel, axe) ou l’aspectquantitatif (cylindre). Comment « combiner » lescylindres et les axes de l’astigmatisme en un indiceunique quantifiant le degré d’énantiomorphisme del’astigmatisme entre les deux yeux ? Nous avonsquantifié le degré d’énantiomorphisme de l’astig-matisme entre les deux yeux par un indice enutilisant les expressions « non polaires » de l’astig-matisme. Les données polaires de l’astigmatismeont été exprimées à l’aide des coordonnées carté-siennes par un point dans un « plan dioptrique »(Fig 52).Astigmatisme de l’œil droit : CylindreD ; axeD →
xD, yDAstigmatisme de l’œil gauche : Cylindre G ; axeG
→ xG, yGAstigmatisme énantiomorphe parfait de l’œil
Figure 49 Exemple d’énantiomorphisme dans le corps humain.A. Les mains. La main (kheir, en grec) est l’exemple typiqued’un objet chiral. Une main n’est pas superposable à son imagedans un miroir plan. Cependant les deux mains sont l’imagel’une de l’autre dans un miroir plan. Cette relation s’appellel’énantiomérie : l’image d’une main dans un miroir est superpo-sable à la main controlatérale.B. Cartes de courbure cornéenne (Placido). Ces deux topogra-phies cornéennes présentent une symétrie en miroir. Dans l’as-tigmatisme idiopathique, les deux cornées présentent fréquem-ment un certain degré d’énantiomorphisme.
Figure 50 Énantiomorphisme d’un acide aminé (représentationde Cram). L’alanine possède deux configurations spatiales (dex-trogyre et lévogyre) du fait de l’existence d’un carbone asymé-trique (quatre composés différents). Les deux stéréo-isomèresne sont pas superposables mais sont l’image l’un de l’autre dansun miroir plan.
169Astigmatisme : analyses mathématiques et représentations graphiques

droit : Cylindre E, axe E → xE, yE = xD, –yDLa distance entre le point représentant l’astig-
matisme de l’œil gauche (G) et le point correspond
à l’énantiomorphisme parfait de l’œil droit, (E)mesure le degré d’énantiomorphisme entre lesdeux yeux (Fig. 52, 53).
¶ GE ¶ = � � XG − (XE) � 2 + � yG− (yE) � 2
= � � XG− XD � 2 + � yG+yD � 2
= � � CylG × Cos(2AxeG) − CylD × Cos(2AxeD) � 2 + � CylG × Sin(2AxeG) + CylD × Sin(2AxeD)
= � Cyl2D + Cyl2G + − 2CylD × CylG � Cos(2AxeD) × Cos(2AxeG) − Sin(2Axe
= �Cyl2D + Cyl2G− 2CylD × CylG � Cos(2 × (AxeD+ AxeG)) �
Les deux identités trigonométriques suivantesont été utilisées :
Cos2a + Sin2a = 1
Cos(a + b) = Cosa × Cosb − Sina × Sinb
L’indice a la dimension d’une puissance et estexprimé en dioptries (D).
L’éloignement de l’énantiomorphisme parfait setraduit par une augmentation de la distance GE etinversement. L’indice prend une valeur nulle (mini-mum de la fonction) uniquement en cas d’énantio-morphisme parfait entre l’astigmatisme droit etl’astigmatisme gauche (Fig. 52, 53). Dans ce cas,les points G et E sont confondus, la distance GE etl’indice deviennent nuls. Ceci ne se produit que si
Figure 51 Énantiomorphisme de l’astigmatisme réfractif (subjectif).A. Exemple d’astigmatisme présentant un énantiomorphisme parfait. Les cylindres droit et gauche sont égaux et les axes présententune symétrie en miroir par rapport à l’axe passant par le plan sagittal (axe 90°).CylindreDroit ∞ CylindreGaucheAxeDroit + AxeGauche = 180°B. Exemple d’absence d’énantiomorphisme entre les yeux. Les deux cylindres sont asymétriques et les deux axes ne présentent pasde symétrie en miroir.CylindreDroit ∞ CylindreGaucheAxeDroit + AxeGauche ∞ 180°
170 O. Touzeau et al.

les deux conditions suivantes sont simultanémentvérifiées :
AxeDroit + AxeGauche = 180° (symétrie en miroir desaxes)
CylindreDroit = CylindreGauche (égalité des cylindres)
La pertinence de l’indice peut être vérifiée gra-phiquement à partir du graphique de Holladay
(Fig. 54).24,25 La situation de l’énantiomorphismed’un patient donné peut être appréciée directe-ment à partir de l’examen des données polaires(axe et cylindre) des deux yeux. L’appréciation estcependant qualitative et non quantitative. L’indiceprend tout son intérêt quand il s’agit d’analyserstatistiquement l’énantiomorphisme de l’astigma-tisme (quantification précise, analyse d’un groupede patients, analyse d’un patient à multiples repri-ses...).Toutes les interventions chirurgicales portant sur
le segment antérieur de l’œil se traduisent par uneperte de l’énantiomorphisme variable selon le typede l’intervention. Une phacoémulsification qui estmoins astigmatogène qu’une extraction extracap-sulaire manuelle a moins de retentissement surl’énantiomorphisme. Le cas extrême est la greffede cornée. C’est pour ce groupe que la valeur del’indice est maximale. L’astigmatisme postkérato-plastique dépend de multiples facteurs comme l’in-congruence tissulaire entre le greffon et le lit ré-cepteur, le rôle des sutures, la cicatrisation.L’influence de l’astigmatisme préopératoire estminime. L’astigmatisme d’un œil greffé est quasiindépendant de l’astigmatisme préopératoire etdonc par conséquent de l’astigmatisme controlaté-ral. Une perte de l’énantiomorphisme est égale-ment observée dans le kératocône. Celle-ci sembleplutôt liée à la composante cylindrique (anisomé-tropie cylindrique) qu’à la composante axiale (sy-métrie en miroir des axes relativement conservée).La majorité des indices topographiques utiliséspour la détection des kératocônes ne considère lesdonnées d’un œil pris isolément (indice I-S, kérato-
Figure 52 Quantification du degré d’énantiomorphisme de l’as-tigmatisme par une distance à l’aide des coordonnées cartésien-nes. Dans ce plan dioptrique, les distances ont une significationoptique. La distance GE entre l’astigmatisme de l’œil gauche etastigmatisme énantiomorphe parfait de l’œil droit peut quanti-fier le degré d’énantiomorphisme entre les deux yeux. Cettedistance se calcule directement à l’aide des coordonnées carté-siennes (x, y) de l’œil droit et de l’œil gauche en appliquant lethéorème de Pythagore.
Figure 53 Représentation de l’énantiomorphisme à l’aide du graphique de Holladay. En cas d’énantiomorphisme parfait entre lesdeux yeux, les points G et E sont confondus.
171Astigmatisme : analyses mathématiques et représentations graphiques

métrie maximale...). L’information de l’œilcontrolatéral n’est pas utilisée dans la plupart dessystèmes d’aide à la décision. L’utilisation del’énantiomorphisme pourrait être intéressantedans le diagnostic du kératocône.
La possibilité de quantifier à l’aide d’un indicel’énantiomorphisme permet de mieux analyser lagéométrie de la cornée et de l’œil et de compren-dre la relation entre les deux yeux. Par exemple,l’influence de l’âge sur l’énantiomorphisme peutêtre analysée par une simple corrélation entrel’âge et l’indice. Outre la rotation de l’axe, levieillissement s’accompagne d’une diminution par-tielle de l’énantiomorphisme de l’astigmatisme.
Conclusion
L’écriture polaire (cylindre et axe) décrit parfaite-ment l’astigmatisme régulier d’un œil mais estdifficilement exploitable d’un point de vue statisti-que. Les expressions non polaires de l’astigmatismepermettent d’analyser et de représenter graphi-quement l’astigmatisme.
Références
1. Alpins NA. A new method of analyzing vectors for changesin astigmatism. J Cataract Refract Surg 1993;19:524–533.
2. Alpins NA. New method of targeting vectors to treat astig-matism. J Cataract Refract Surg 1997;23:65–75.
3. Alpins NA. Vector analysis of astigmatism changes by flat-tening, steepening, and torque. J Cataract Refract Surg1997;23:1503–1514.
4. Alpins NA. Astigmatism analysis by the Alpins method. JCataract Refract Surg 2001;27:31–49.
5. Assouline M, Lebuisson DA. Topographie cornéenne. EncyclMéd Chir 1998:21 (Elsevier SAS, Paris), Ophtalmologie,21-200-A-12.
6. Bogan SJ, Waring GO, Ibrahim O, Drews C, Curtis L. Classi-fication of normal corneal topography based on computer-assisted videokeratography. Arch Ophthalmol 1990;108:945–949.
7. Borderie VM, Laroche L. Measurement of irregular astigma-tism using semimeridian data from videokeratographs. JRefract Surg 1996;12:595–600.
8. Corbé C, Menu JP, Chaine G. Traité d’optique physi-ologique et clinique. Paris: Doin; 1993.
9. Cravy TV. Calculation of the change in corneal astigmatismfollowing cataract extraction. Ophthalmic Surg 1979;10:38–49.
10. Deal FC, Toop J. Recommented coordinate systems for thinspherocylindrical lenses. Optom Vis Sci 1993;70:409–413.
Figure 54 Vérification graphique de la pertinence de la distance GE pour quantifier l’énantiomorphisme de l’astigmatisme. L’écriturecartésienne de l’astigmatisme et le graphique de Holladay définissent un plan dioptrique homogène. Les distances entre les pointsreprésentant l’astigmatisme ont une signification optique. Chaque cercle représente 0,5 D (0,5 D pour le cercle interne et 2 D pour lecercle le plus périphérique).
172 O. Touzeau et al.

11. Dingeldein SA, Klein SD, Wilson SE. Quantitative descrip-tors of clinical shape derived from computer-assistedanalysis of photokeratographs. Refract Corneal Surg 1989;5:372–378.
12. Friedman NE, Zadnik K, Mutti DO, Fusaro RE. Quantifyingcorneal toricity from videokeratoscopy with Fourier analy-sis. J Refract Surg 1996;12:108–113.
13. Gartner WF. Astigmatism and optometric vectors. Am JOptom Arch Am Acad Optom 1965;42:459–463.
14. Gatinel D, Haouat M, Hoang-Xuan T. Etude des paramètrespermettant la description mathématique de l’asphéricitécornéenne. J Fr Ophtalmol 2002;25:81–90.
15. Harris WF. Testing hypotheses on dioptric power. OptomVis Sci 1992;69:835–845.
16. Harris WF. Dioptric power: its representation in three andfour-dimensional space. Optom Vis Sci 1997;74:349–366.
17. Harris WF. Invariance of ophthalmic properties underspherocylindrical transposition. Optom Vis Sci 1997;74:459–462.
18. Harris WF. A unified paraaxial approach to astigmaticoptics. Optom Vis Sci 1999;76:480–499.
19. Harris WF. Astigmatism. Ophthalmic Physiol Opt 2000;20:11–30.
20. Harris WF. Dioptric strengh: a scalar representation ofdioptric power. Ophthalmic Physiol Opt 1994;14:216–218.
21. Hjortdal JO, Erdmann L, Bek T. Fourier analysis of video-keratoscopic data. A tool for separation of separation ofspherical, regular astigmatic and irregular astigmatic cor-neal power components. Ophthalmic Physiol Opt 1995;15:171–185.
22. Holladay JT, Cravy TV, Koch DD. Calculating the surgicallyinduced refractive change following ocular surgery. J Cata-ract Refract Surg 1992;18:429–1143.
23. Holladay JT. Corneal topography using the Holladay Diag-nostic Summary. J Cataract Refract Surg 1997;23:209–221.
24. Holladay JT, Dudeja DR, Koch DD. Evalating and reportingastigmatism for individual and aggregate data. J CataractRefract Surg 1998;24:57–65.
25. Holladay JT, Moran JR, Kezirian GM. Analysis of aggregatesurgically induced refractive change, prediction error, andintraocular astigmatism. J Cataract Refract Surg 2001;27:61–79.
26. Jaffe NS, Claydman HM. The physiopathology of the cor-neal astigmatism after cataract extraction. Trans Am AcadOphthalmol Otolaryngol 1975;79:OP615–OP630.
27. Javal E. Histoire et bibliographie de l’astigmatisme. AnnOculist 1866;55:105–127.
28. Kaye SB, Patterson A. Analyzing refractive changes afteranterior segment surgery. J Cataract Refract Surg 2001;27:50–60.
29. Kaye SB, Harris WF. Analyzing refractive data. J CataractRefract Surg 2002;28:2109–2116.
30. Keating MP. Advantages of a block matrix formulation foran astigmatism system. Am J Optom Physiol Opt 1982;59:851–857.
31. Keating MP. An easier method to obtain spher, cylinder,and axis from an off-axis doptric power matrix. Am JOptom Physiol Opt 1980;57:734–737.
32. Keating MP. On the use of matrices for the mean value ofrefractive errors. Ophthalmic Physiol Opt 1983;3:201–203.
33. Keating MP. Equivalent dioptric power asymmetry rela-tions for thick astigmatic systems. Optom Vis Sci 1997;74:388–392.
34. Le Grand Y. Optique physiologique. Paris: édition de la« revue d’optique »; 1956.
35. Leitman T, Proctor KS, Azar FA, Azar DT. Measuring surgi-cally induced astigmatic and prismatic corrections. In:Azar DT, editor. Refractive surgery. New York: Appletonand lange; 1997. p. 185–193.
36. Long WF. A matrix formalism for decentration problems.Am J Optom Physiol Opt 1976;53:53–55.
37. Long WF. Lens power matrices and the sum of equivalentspheres. Optom Vis Sci 1991;68:821–822.
38. Maloney RK, Bogan SJ, Waring 3rd GO. Determination ofcorneal image forming properties from corneal topogra-phy. Am J Ophthalmol 1993;115:31–41.
39. Mardia KV. Statistics of directional data. London: Aca-demic Press; 1972.
40. Munoz-Escriva L, Furlan WD. Statistical analysis when deal-ing with astigmatism: assessment of different spherocylin-drical notations. Ophthalmic Epidemiol 2001;8:27–37.
41. Naeser K. Conversion of keratometers readings to polarvalues. J Cataract Refract Surg 1990;16:741–745.
42. Naeser K, Behrens JK, Naeser EV. Quantitative assessmentof corneal astigmatic surgery: expanding the polar valuesconcept. J Cataract Refract Surg 1994;20:162–168.
43. Naeser K, Behrens JK. Correlation between polar valuesand vectors analysis. J Cataract Refract Surg 1997;23:76–81.
44. Naeser K. Format for reporting surgically induced astigma-tism on aggregate data. J Cataract Refract Surg 1998;24:1550–1552.
45. Naeser K. Polar value analysis of refractive data. J Cata-ract Refract Surg 2001;27:86–94.
46. Naeser K, Hjordal J. Multivariate analysis of refractivedata. The Mathematics and statistics of spherocylinders. JCataract Refract Surg 2001;27:129–142.
47. Naeser K. Standards for reporting results of refractivesurgery. J Refract Surg 2001;17:470–473.
48. Naylor EJ. Astigmatism difference in refractive error. Br JOphthalmol 1968;52:422–425.
49. Olsen T, Dam-Johansen M. Evaluating surgically inducedastigmatism. J Cataract Refract Surg 1994;20:517–522.
50. Olsen T, Dam-Johansen M, Bek T, Hjordal JO. Evaluatingsurgically induced astigmatism by Fourier analysis of cor-neal topography data. J Cataract Refract Surg 1996;22:318–323.
51. Osikiba T, Tomidokoro A, Tokunaga T, Miyata N. Quantita-tive evaluation of irregular astigmatism by Fourier seriesharmonic analysis of videokeratoscopy data. Invest Oph-thalmol Vis Sci 1998;39:705–709.
52. Pascal JI. Power of cylinders in oblique meridians. ArchOphthalmol 1939;22:290–291.
53. Rabbetts RB. Scalar representation of astigmatism. Oph-thalmic Physiol Opt 1996;16:257–260.
54. Raasch TW. Corneal topography and irregular astigmatism.Optom Vis Sci 1995;72:809–815.
55. Raasch TW. Spherocylindrical refractive errors and visualacuity. Optom Vis Sci 1995;72:272–275.
56. Raasch TW. Clinical refraction in three-dimensional diop-tric space revisited. Optom Vis Sci 1997;74:376–380.
57. Rezlaff J, Paden PY, Ferrell L. Vector analysis ofastigmatism: adding and subtracting spherocylinders. JCataract Refract Surg 1993;19:393–398.
58. Roman S, Dobigny M, Ullern M. Comment calculer unastigmatisme chirurgicalement induit? J Fr Ophtalmol1997;20:241–245.
59. Saunders H. A method for determining the mean value ofrefractive error. Br J Physiol Opt 1980;34:1–11.
60. Saunders H. The algebra of sphero-cylinders. OphthalmicPhysiol Opt 1985;5:157–163.
173Astigmatisme : analyses mathématiques et représentations graphiques

61. Saraux H, Biais B. Physiologie oculaire. Paris: Masson;1983.
62. Stokes GC. 19th Meeting of the Bristish Association for theAdvancement of Science, 1849. Trans Sect 1850:10–11.
63. Thibos LN. Application of Fourier analysis to the descrip-tion of optical lens power and to the statistical analysis ofrefractive error. Optom Vis Sci 1992;69(suppl):114.
64. Thibos LN. A vector method for the analysis of astigmaticrefractive errors. Visual science and its applications.Washington DC: Optical Society of America; 1994. p. 14–17.
65. Thibos LN, Wheeler W, Horner D. Power vectors: an appli-cation of Fourier analysis to the description and statisticalanalysis of refractive error. Optom Vis Sci 1997;74:367–375.
66. Thibos LN, Wheeler W, Horner D. Power vectors analysis ofthe optical outcome of refractive surgery. J Cataractrefract Surg 2001;27:80–85.
67. Toulemont PJ, Serdarevic ON. Modèles vectorielsd’analyses des variations d’astigmatisme cornéenantérieur. J Fr Ophtalmol 1993;16:472–481.
68. Touzeau O, Borderie V, Chastang P, Allouch C, Scheer S,Laroche L. Corrélation entre la réfraction et la topographiecornéenne dans les astigmatismes idiopathiques et post-chirurgicaux. J Fr Ophtalmol 2001;24:129–138.
69. Touzeau O, Allouch C, Borderie V, Laroche L. Topographied’élévation et analyse du segment antérieur par balayaged’une fente lumineuse (Orbscan). Encycl Méd Chir 2001:27(Elsevier SAS, Paris), Ophtalmologie, 21-200-A-15.
70. Touzeau O, Allouch C, Borderie VM, Scheer SE, Bourcier T,Laroche L. Comparison of astigmatism methods to evalu-ate variation of astigmatism induced by penetratingkeratoplasty suture removal. Association for Research inVision and Ophthalmology. may 2003.
71. Waring 3rd GO. Standard graphs for reporting refractivesurgery. J Refract Surg 2000;16:459–466.
72. Wilson SE, Klyce SD. Quantitative descriptors of cornealtopography, a clinical study. Arch Ophthalmol1991;109:349–353.
174 O. Touzeau et al.