Embed Size (px)
Citation preview
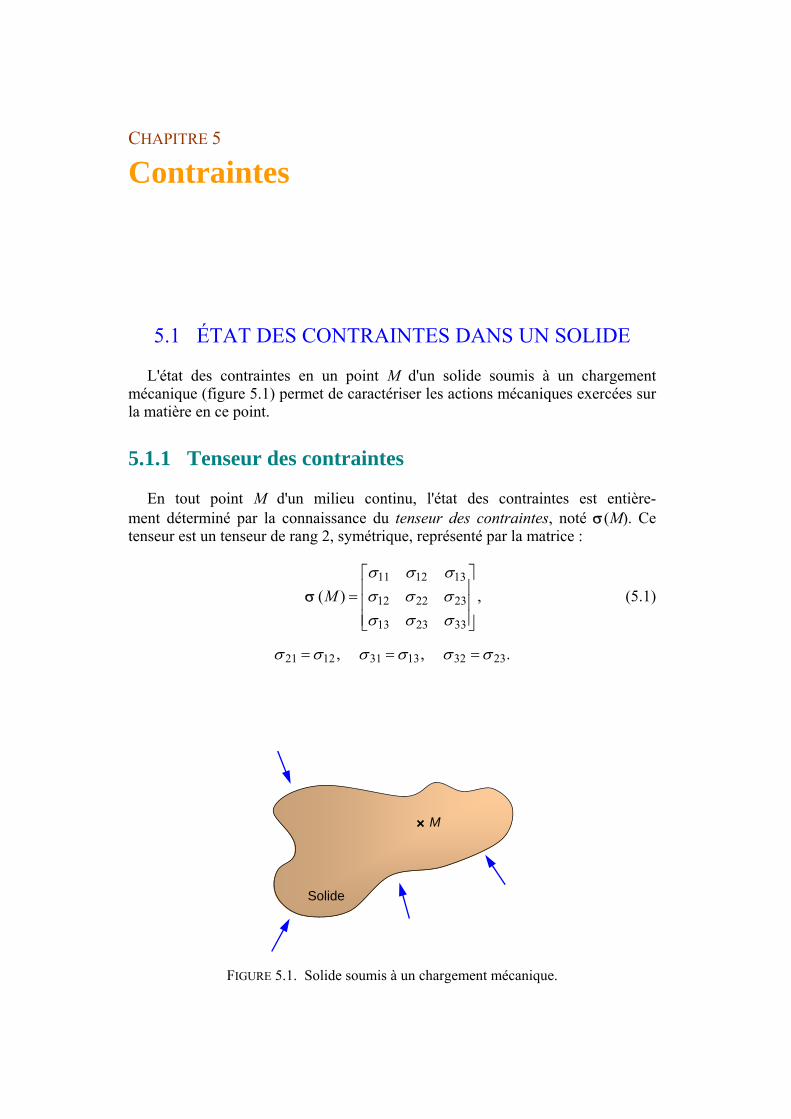
CHAPITRE 5
Contraintes
5.1 ÉTAT DES CONTRAINTES DANS UN SOLIDE
L'état des contraintes en un point M d'un solide soumis à un chargement mécanique (figure 5.1) permet de caractériser les actions mécaniques exercées sur la matière en ce point.
5.1.1 Tenseur des contraintes
En tout point M d'un milieu continu, l'état des contraintes est entière- ment déterminé par la connaissance du tenseur des contraintes, noté σ (M). Ce tenseur est un tenseur de rang 2, symétrique, représenté par la matrice :
11 12 13
12 22 23
13 23 33
( )Mσ σ σσ σ σσ σ σ
⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥⎣ ⎦
σ , (5.1)
21 12 31 13 32 23, , .σ σ σ σ σ σ= = =
FIGURE 5.1. Solide soumis à un chargement mécanique.
Solide
M
88 Chapitre 5 Contraintes
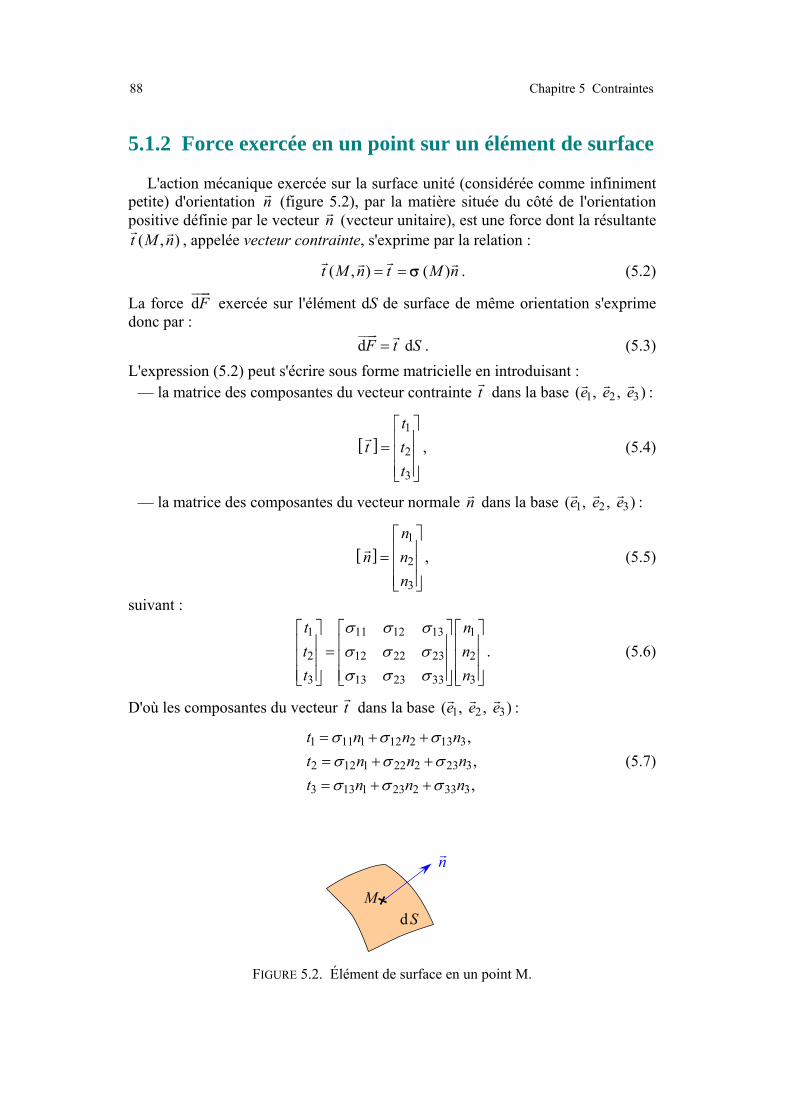
5.1.2 Force exercée en un point sur un élément de surface
L'action mécanique exercée sur la surface unité (considérée comme infiniment petite) d'orientation n (figure 5.2), par la matière située du côté de l'orientation positive définie par le vecteur n (vecteur unitaire), est une force dont la résultante
( , )t M n , appelée vecteur contrainte, s'exprime par la relation :
( , ) ( )t M n t M n= = σ . (5.2)
La force dF exercée sur l'élément dS de surface de même orientation s'exprime donc par : d dF t S= . (5.3) L'expression (5.2) peut s'écrire sous forme matricielle en introduisant :
— la matrice des composantes du vecteur contrainte t dans la base 1 2 3( , , )e e e :
[ ]1
2
3
tt t
t
⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥⎣ ⎦
, (5.4)
— la matrice des composantes du vecteur normale n dans la base 1 2 3( , , )e e e :
[ ]1
2
3
nn n
n
⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥⎣ ⎦
, (5.5)
suivant :
1 11 12 13 1
2 12 22 23 2
3 13 23 33 3
t nt nt n
σ σ σσ σ σσ σ σ
⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥=⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦
. (5.6)
D'où les composantes du vecteur t dans la base 1 2 3( , , )e e e :
1 11 1 12 2 13 3
2 12 1 22 2 23 3
3 13 1 23 2 33 3
,,,
t n n nt n n nt n n n
σ σ σσ σ σσ σ σ
= + += + += + +
(5.7)
FIGURE 5.2. Élément de surface en un point M.
n
M d S
5.2 Propriétés du tenseur des contraintes 89
et le vecteur contrainte s'écrit :
1 1 2 2 3 3t t e t e t e= + + . (5.8)
5.2 PROPRIÉTÉS DU TENSEUR DES CONTRAINTES
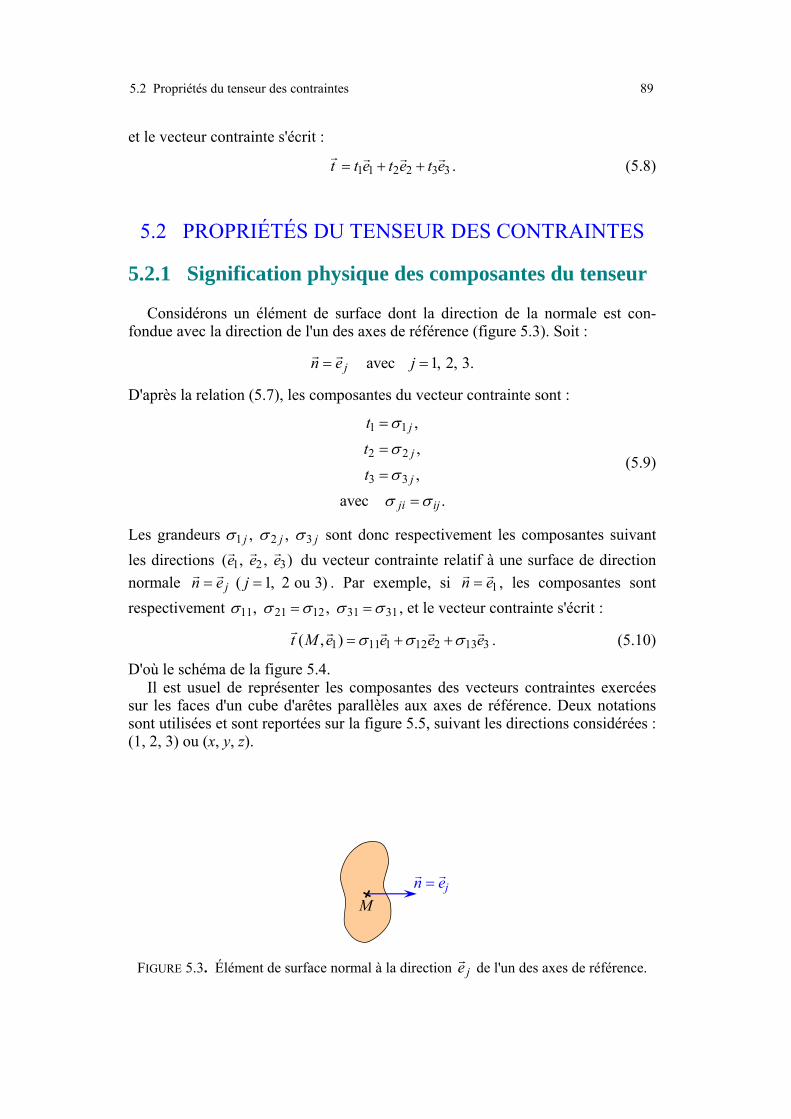
5.2.1 Signification physique des composantes du tenseur
Considérons un élément de surface dont la direction de la normale est con-fondue avec la direction de l'un des axes de référence (figure 5.3). Soit :
avec 1, 2, 3.jn e j= =
D'après la relation (5.7), les composantes du vecteur contrainte sont :
1 1
2 2
3 3
,,,
avec .
j
j
j
ji ij
ttt
σ
σ
σ
σ σ
=
=
=
=
(5.9)
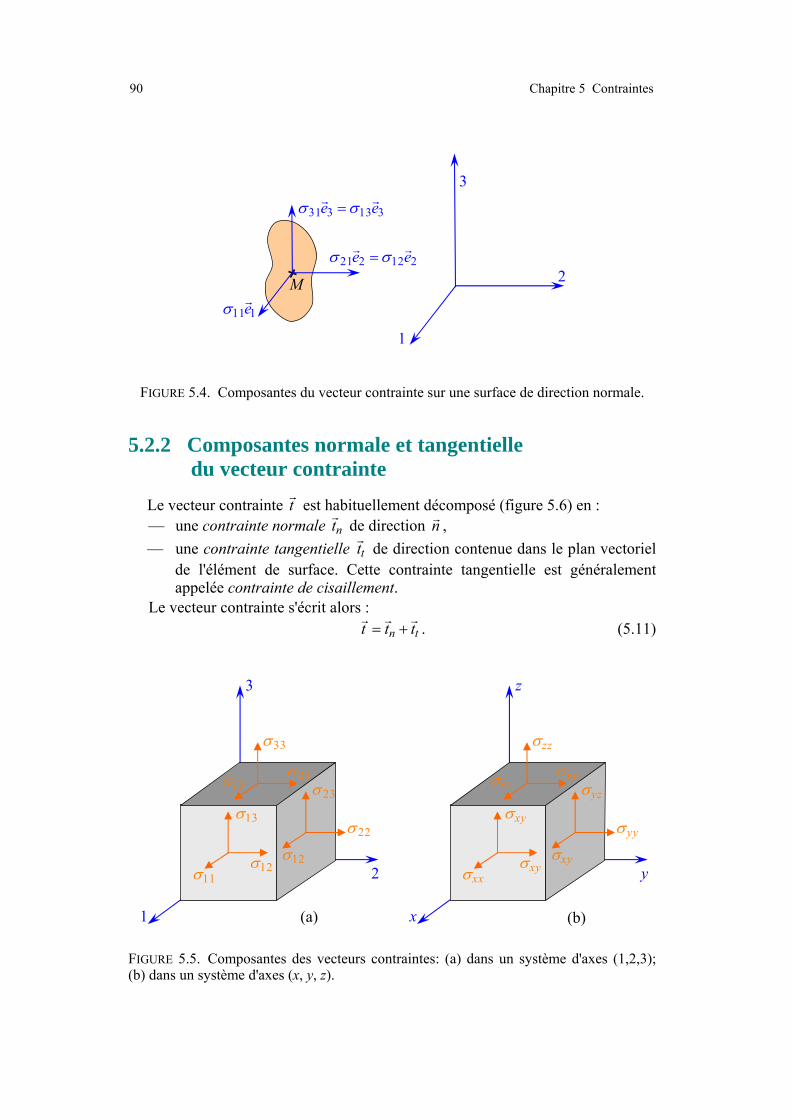
Les grandeurs 1 2 3, , j j jσ σ σ sont donc respectivement les composantes suivant les directions 1 2 3( , , )e e e du vecteur contrainte relatif à une surface de direction normale ( 1, 2 ou 3)jn e j= = . Par exemple, si 1n e= , les composantes sont respectivement 11 21 12 31 31, , σ σ σ σ σ= = , et le vecteur contrainte s'écrit :
1 11 1 12 2 13 3( , )t M e e e eσ σ σ= + + . (5.10)
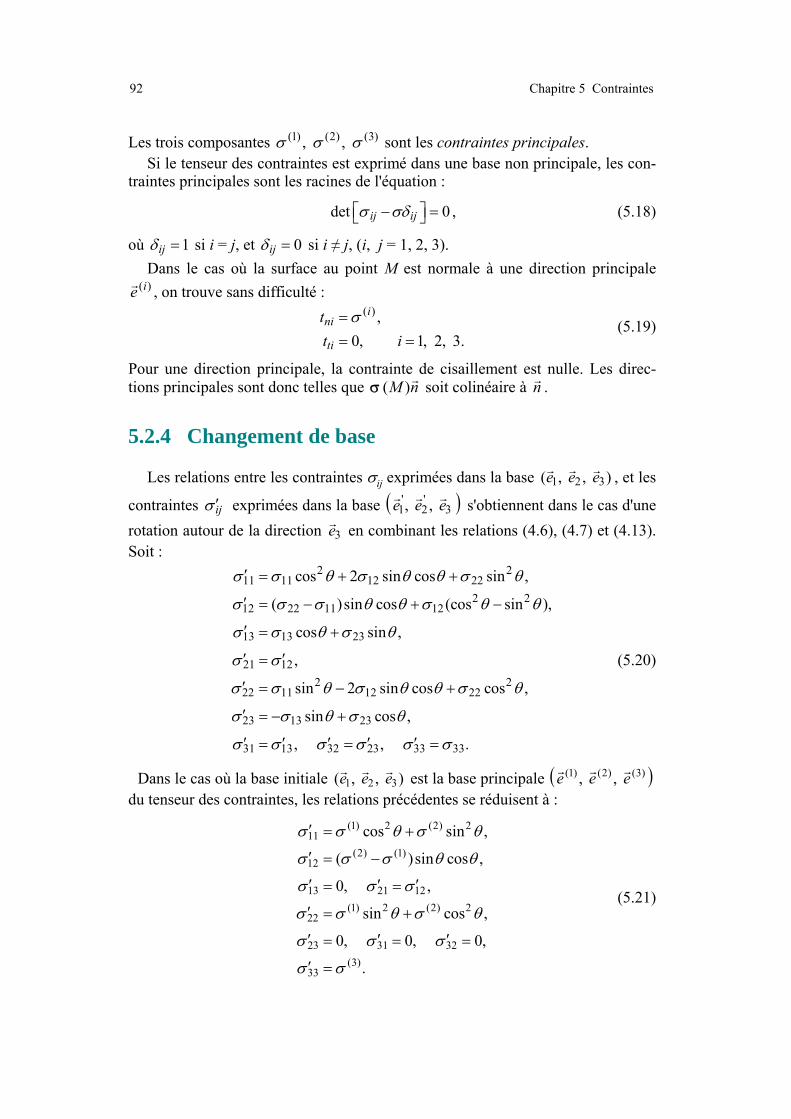
D'où le schéma de la figure 5.4. Il est usuel de représenter les composantes des vecteurs contraintes exercées
sur les faces d'un cube d'arêtes parallèles aux axes de référence. Deux notations sont utilisées et sont reportées sur la figure 5.5, suivant les directions considérées : (1, 2, 3) ou (x, y, z).
FIGURE 5.3. Élément de surface normal à la direction je de l'un des axes de référence.
M jn e=
90 Chapitre 5 Contraintes
FIGURE 5.4. Composantes du vecteur contrainte sur une surface de direction normale.
5.2.2 Composantes normale et tangentielle du vecteur contrainte
Le vecteur contrainte t est habituellement décomposé (figure 5.6) en : — une contrainte normale nt de direction n , — une contrainte tangentielle tt de direction contenue dans le plan vectoriel
de l'élément de surface. Cette contrainte tangentielle est généralement appelée contrainte de cisaillement.
Le vecteur contrainte s'écrit alors : n tt t t= + . (5.11)
FIGURE 5.5. Composantes des vecteurs contraintes: (a) dans un système d'axes (1,2,3); (b) dans un système d'axes (x, y, z).
M 21 2 12 2e eσ σ=
31 3 13 3e eσ σ=
11 1eσ
2
1
3
22σ
23σ
12σ
23σ
33σ
13σ
12σ
13σ
11σ
1
2
3
yyσ
yzσ
xyσ
yzσ
zzσ
xzσ
xyσ
xyσ
xxσ
x
y
z
(a) (b)

5.2 Propriétés du tenseur des contraintes 91
FIGURE 5.6. Composantes normale et tangentielle du vecteur contrainte.
La contrainte normale s'exprime suivant :
n nt t n= , avec nt n t= ⋅ , (5.12)
où tn est la composante normale du vecteur contrainte. Introduisant la relation (5.2), cette composante s'écrit suivant :
[ ] ( )nt n M n= ⋅ σ . (5.13)
Cette relation peut être réécrite en utilisant la notation matricielle sous la forme :
t ( )nt M= n nσ , (5.14)
en introduisant la matrice ligne [ ]t1 2 3n n n=n transposée de la matrice n.
Nous obtenons : 2 2 2
11 1 22 2 33 3 12 1 2 13 1 3 23 2 32 2 2nt n n n n n n n n nσ σ σ σ σ σ= + + + + + . (5.15)
Si tn est positif, on dit que le solide en M subit dans la direction n une tension ou traction. Si tn est négatif, le milieu subit une compression.
La contrainte de cisaillement peut être déterminée par la relation :
[ ]{ } ( )tt n M n n= ∧ ∧σ . (5.16)
5.2.3 Directions principales. Contraintes principales
Le tenseur des contraintes étant de rang 2, il existe au moins une base (chapitre 4), dite base principale du tenseur des contraintes, dans laquelle la matrice repré-sentant ce tenseur est diagonale. Dans cette base principale, la matrice des con-traintes s'écrit :
(1)
(2)
(3)
0 0
( ) 0 0
0 0
M
σ
σ
σ
⎡ ⎤⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥⎣ ⎦
σ . (5.17)
M
n nt tt
t
92 Chapitre 5 Contraintes
Les trois composantes (1) (2) (3), , σ σ σ sont les contraintes principales. Si le tenseur des contraintes est exprimé dans une base non principale, les con-
traintes principales sont les racines de l'équation :
det 0ij ijσ σδ⎡ ⎤− =⎣ ⎦ , (5.18)
où 1ijδ = si i = j, et 0ijδ = si i ≠ j, (i, j = 1, 2, 3). Dans le cas où la surface au point M est normale à une direction principale
( )ie , on trouve sans difficulté :
( ) ,
0, 1, 2, 3.
ini
ti
tt i
σ== =
(5.19)
Pour une direction principale, la contrainte de cisaillement est nulle. Les direc-tions principales sont donc telles que ( )M nσ soit colinéaire à n .
5.2.4 Changement de base
Les relations entre les contraintes σij exprimées dans la base 1 2 3( , , )e e e , et les
contraintes ijσ ′ exprimées dans la base ( )' '1 2 3, , e e e s'obtiennent dans le cas d'une
rotation autour de la direction 3e en combinant les relations (4.6), (4.7) et (4.13). Soit :
2 211 11 12 22
2 212 22 11 12
13 13 23
21 122 2
22 11 12 22
23 13 23
31 13 32 23 33 3
cos 2 sin cos sin ,
( )sin cos (cos sin ),
cos sin ,
,
sin 2 sin cos cos ,
sin cos ,
, ,
σ σ θ σ θ θ σ θ
σ σ σ θ θ σ θ θ
σ σ θ σ θ
σ σ
σ σ θ σ θ θ σ θ
σ σ θ σ θ
σ σ σ σ σ σ
′ = + +
′ = − + −
′ = +
′ ′=
′ = − +
′ = − +
′ ′ ′ ′ ′= = = 3.
(5.20)
Dans le cas où la base initiale 1 2 3( , , )e e e est la base principale ( )(1) (2) (3), , e e e du tenseur des contraintes, les relations précédentes se réduisent à :
(1) 2 (2) 211
(2) (1)12
13 21 12(1) 2 (2) 2
22
23 31 32(3)
33
cos sin ,
( )sin cos ,
0, ,
sin cos ,
0, 0, 0,
.
σ σ θ σ θ
σ σ σ θ θ
σ σ σ
σ σ θ σ θ
σ σ σ
σ σ
′ = +
′ = −
′ ′ ′= =
′ = +
′ ′ ′= = =
′ =
(5.21)

5.3 États particuliers de contraintes 93
5.3 ÉTATS PARTICULIERS DE CONTRAINTES
5.3.1 Tenseur sphérique et déviateur des contraintes
Il est toujours possible de décomposer le tenseur des contraintes ( )Mσ en un point M, comme la somme de deux tenseurs : l'un ( )S Mσ appelé tenseur sphérique, et l'autre ( )D Mσ appelé déviateur ; soit :
( ) ( ) ( )S DM M M= +σ σ σ . (5.22)
Ces tenseurs sont définis de la manière suivante :
( )3SsM = Iσ , (5.23)
où I est le tenseur unitaire et s la trace de ( )Mσ : tr ( )s M= σ . Le tenseur ( )D Mσ est un tenseur de trace nulle, ayant mêmes directions principales que
( )Mσ et pour contraintes principales :
(1) (2) (3), , 3 3 3s s sσ σ σ− − − . (5.24)
5.3.2 Compression ou tension sphérique
Un état de contraintes en un point est un état de compression ou tension sphérique, lorsque le déviateur est le tenseur nul. Soit :
( ) ( )3SsM M= = Iσ σ . (5.25)
Cet état est donc caractérisé par les propriétés suivantes : — le vecteur contrainte ( , )t M n est colinéaire à n ; — les contraintes principales sont égales :
(1) (2) (3)3sσ σ σ= = = , (5.26)
— quel que soit n , nous avons :
, 0.3n tst t= = (5.27)
5.3.3 Traction ou compression simple dans une direction
Un état de contraintes est un état de traction ou compression simple dans une direction si, et seulement si, deux des contraintes principales sont nulles.

94 Chapitre 5 Contraintes
Par exemple : (2) (3) 0σ σ= = . On a alors un état de contrainte uniaxiale dans la direction (1)e . Si (1) 0σ > , on a une traction simple. Si (1) 0σ < , on a une compression simple. On trouve aisément que la matrice des contraintes n'est pas modifiée par rotation autour de la direction (1)e .
Comme autres propriétés, nous avons : — le vecteur ( , )t M n est toujours colinéaire à (1)e ;
— si n est orthogonal à (1)e , alors : ( , ) 0t M n = .
5.3.4 Cisaillement simple
En un point M, un état de contraintes est un état de cisaillement simple (ou pur), lorsque l'une des contraintes principales est nulle et les deux autres opposées. Le déterminant et la trace de la matrice des contraintes sont nuls. Par exemple :
(1)
(2)
(3)
,
,
0.
σ τ
σ τ
σ
=
= −
=
(5.28)
La matrice des contraintes s'écrit alors :
0 0( ) 0 0
0 0 0M
ττ
⎡ ⎤⎢ ⎥= −⎢ ⎥⎢ ⎥⎣ ⎦
σ . (5.29)
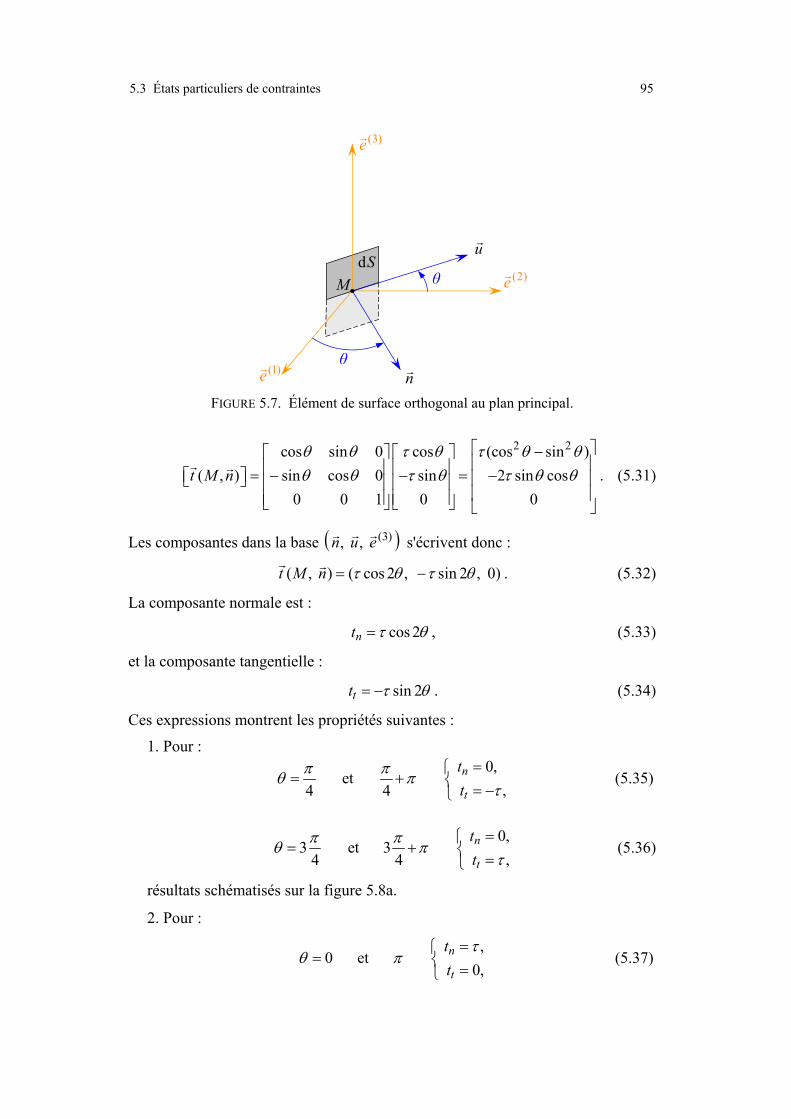
Cherchons les contraintes dans le plan principal, c'est-à-dire les contraintes exercées sur un élément de surface de direction n contenue dans le plan principal ( )(1) (2), e e (figure 5.7). Soit θ l'angle que fait la normale n avec la direction
(1)e : (cos , sin , 0)n θ θ= . Le vecteur contrainte en M dans la direction n est donné par l'expression :
0 0 cos
( , ) 0 0 sin0 0 0 0
t M nτ θ
τ θ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥= −⎡ ⎤⎣ ⎦ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
,
soit : ( , ) ( cos , sin , 0)t M n τ θ τ θ= − , (5.30)
où les composantes sont exprimées dans la base principale ( )(1) (2) (3), , e e e .
Cherchons maintenant les composantes du vecteur contrainte dans la base ( )(3), , n u e (figure 5.7) obtenue par rotation θ autour de la direction (3)e . Elles se déterminent par l'expression :
5.3 États particuliers de contraintes 95
FIGURE 5.7. Élément de surface orthogonal au plan principal.
2 2cos sin 0 cos (cos sin )( , ) sin cos 0 sin 2 sin cos
0 0 1 0 0t M n
θ θ τ θ τ θ θθ θ τ θ τ θ θ
⎡ ⎤−⎡ ⎤ ⎡ ⎤⎢ ⎥⎢ ⎥ ⎢ ⎥= − − = −⎡ ⎤ ⎢ ⎥⎣ ⎦ ⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦
. (5.31)
Les composantes dans la base ( )(3), , n u e s'écrivent donc :
( , ) ( cos 2 , sin 2 , 0)t M n τ θ τ θ= − . (5.32)
La composante normale est :
cos 2nt τ θ= , (5.33)
et la composante tangentielle :
sin 2tt τ θ= − . (5.34)
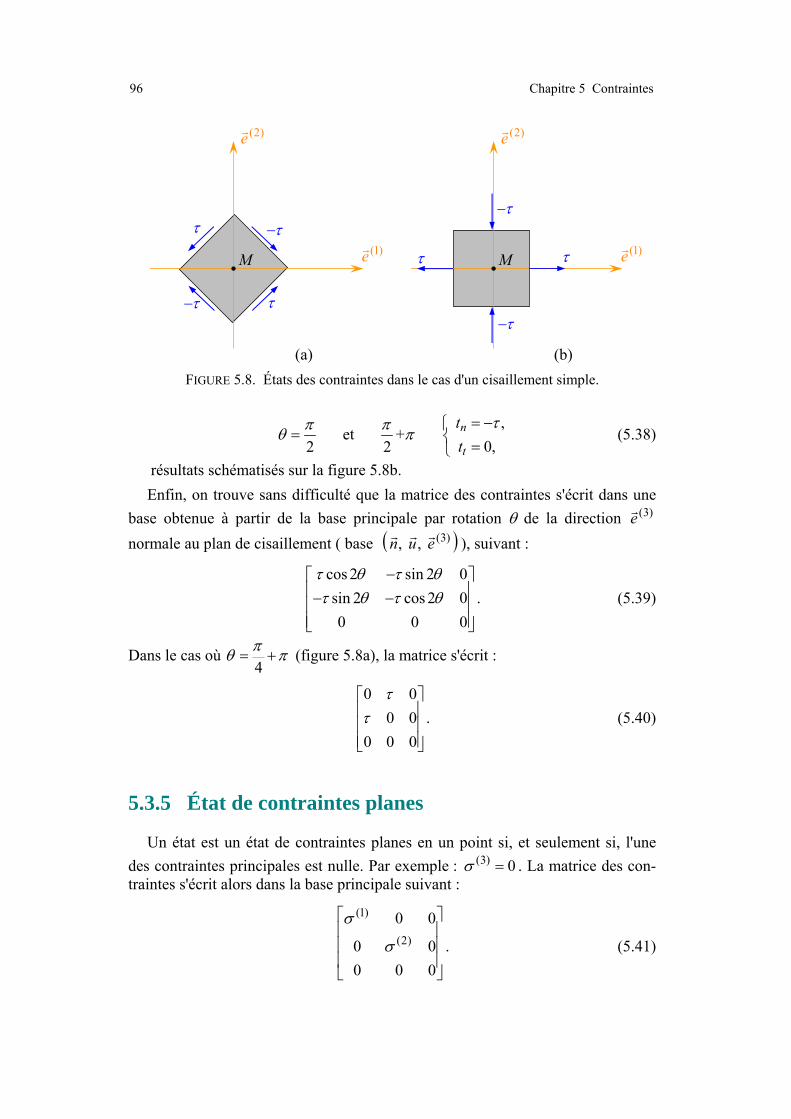
Ces expressions montrent les propriétés suivantes :
1. Pour :
0,
et ,4 4
n
t
tt
π πθ πτ
=⎧= + ⎨ = −⎩
(5.35)
0,
3 et 3 ,4 4
n
t
tt
π πθ πτ
=⎧= + ⎨ =⎩
(5.36)
résultats schématisés sur la figure 5.8a.
2. Pour :
,
0 et 0,
n
t
tt
τθ π
=⎧= ⎨ =⎩
(5.37)
θ
θ
n
u
(1)e
(2)e M d S
(3)e
96 Chapitre 5 Contraintes
FIGURE 5.8. États des contraintes dans le cas d'un cisaillement simple.
,
et + 0,2 2
n
t
tt
τπ πθ π= −⎧
= ⎨ =⎩ (5.38)
résultats schématisés sur la figure 5.8b. Enfin, on trouve sans difficulté que la matrice des contraintes s'écrit dans une
base obtenue à partir de la base principale par rotation θ de la direction (3)e normale au plan de cisaillement ( base ( )(3), , n u e ), suivant :
cos 2 sin 2 0sin 2 cos 2 00 0 0
τ θ τ θτ θ τ θ
−⎡ ⎤⎢ ⎥− −⎢ ⎥⎢ ⎥⎣ ⎦
. (5.39)
Dans le cas où 4πθ π= + (figure 5.8a), la matrice s'écrit :
0 0
0 00 0 0
ττ
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
. (5.40)
5.3.5 État de contraintes planes
Un état est un état de contraintes planes en un point si, et seulement si, l'une des contraintes principales est nulle. Par exemple : (3) 0σ = . La matrice des con-traintes s'écrit alors dans la base principale suivant :
(1)
(2)
0 0
0 00 0 0
σ
σ
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
. (5.41)
(1)e
(2)e
M
τ−
τ− τ
τ
(a)
(1)e
(2)e
M
τ−
τ−
τ τ
(b)

5.4 Notation matricielle de l'ingénieur 97
Dans une base obtenue à partir de la base principale par rotation autour de la direction (3)e , on trouve que la matrice des contraintes s'écrit sous la forme :
11 12
12 22
00
0 0 0
σ σσ σ
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
. (5.42)
Comme propriétés, nous avons :
— si n est colinéaire à (3)e , ( , ) 0t M n = ,
— tout vecteur contrainte est contenu dans le plan vectoriel ( )(1) (2), e e .
5.3.6 État de contraintes quelconque
Étant donné le caractère linéaire des tenseurs, un état quelconque de contraintes en un point M peut toujours être considéré comme la superposition (ou plus généralement comme une combinaison linéaire) d'états de contraintes particuliers.
Par exemple : — un état quelconque peut toujours être considéré comme la superposition de
trois tractions (ou compressions) simples suivant les directions principales; — un état de cisaillement simple peut être considéré comme la superposition
d'une traction et d'une compression de mêmes intensités (paragraphe 5.3.4).
5.4 NOTATION MATRICIELLE DE L'INGÉNIEUR
5.4.1 Introduction de la notation
La symétrie du tenseur des contraintes ramène à 6 le nombre de composantes nécessaires pour définir ce tenseur. Pour cette raison, l'ingénieur utilise une notation qui consiste à remplacer le tableau matriciel des 9 composantes du tenseur par une matrice colonne à 6 composantes, suivant l'une des notations :
1 11
2 22
3 33
4 23
5 13
6 12
xx
yy
zz
yz
xz
xy
σσ σσσ σσσ σσσ σσσ σσσ σ
⎡ ⎤⎡ ⎤ ⎡ ⎤⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥
= = ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎣ ⎦
. (5.43)
Cette notation permet de condenser l'écriture des relations d'élasticité (chapitre 7).

98 Chapitre 5 Contraintes
Toutefois, la détermination du vecteur contrainte nécessite de revenir à la notion matricielle 3 × 3.
5.4.2 Changement de base
Avec cette nouvelle notation, les relations entre les contraintes σi exprimées dans la base ( )1 2 3, , e e e et les contraintes iσ ′ exprimées dans la base ( )' '
1 2 3, , e e e , obtenue par rotation autour de la direction 3e , peuvent s'écrire sous une forme matricielle déduite des expressions (5.20), suivant :
2 21 1
2 22 2
3 3
4 4
5 52 26 6
cos sin 0 0 0 2sin cos
sin cos 0 0 0 2sin cos0 0 1 0 0 0 .0 0 0 cos sin 00 0 0 sin cos 0
sin cos sin cos 0 0 0 cos sin
θ θ θ θσ σσ σθ θ θ θσ σσ σθ θσ σθ θσ σθ θ θ θ θ θ
⎡ ⎤′⎡ ⎤ ⎡ ⎤⎢ ⎥⎢ ⎥ ⎢ ⎥′ ⎢ ⎥−⎢ ⎥ ⎢ ⎥⎢ ⎥′⎢ ⎥ ⎢ ⎥⎢ ⎥=⎢ ⎥ ⎢ ⎥′ ⎢ ⎥−⎢ ⎥ ⎢ ⎥⎢ ⎥⎢ ⎥ ⎢ ⎥′ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎢ ⎥′⎣ ⎦ ⎣ ⎦− −⎣ ⎦
(5.44)
Soit, sous forme condensée :
σ′ = Tσ σ , (5.45)
où σT est la matrice de changement de base des contraintes exprimée par :
2 2
2 2
2 2
cos sin 0 0 0 2sin cos
sin cos 0 0 0 2sin cos0 0 1 0 0 00 0 0 cos sin 00 0 0 sin cos 0
sin cos sin cos 0 0 0 cos sin
σ
θ θ θ θ
θ θ θ θ
θ θθ θ
θ θ θ θ θ θ
⎡ ⎤⎢ ⎥⎢ ⎥−⎢ ⎥⎢ ⎥=⎢ ⎥−⎢ ⎥⎢ ⎥⎢ ⎥− −⎣ ⎦
T . (5.46)
La relation de changement de base inverse est obtenue en inversant l'expression (5.45), soit :
1σ− ′= Tσ σ . (5.47)
La matrice inverse 1σ−T est en fait facilement exprimée à partir de σT en
changeant θ en –θ puisque le changement de base inverse correspond à une rotation de –θ autour de la direction 3e . Soit :
Exercices 99
2 2
2 2
1
2 2
cos sin 0 0 0 2sin cos
sin cos 0 0 0 2sin cos0 0 1 0 0 00 0 0 cos sin 00 0 0 sin cos 0
sin cos sin cos 0 0 0 cos sin
σ
θ θ θ θ
θ θ θ θ
θ θθ θ
θ θ θ θ θ θ
−
⎡ ⎤−⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥=⎢ ⎥⎢ ⎥
−⎢ ⎥⎢ ⎥− −⎣ ⎦
T . (5.48)
EXERCICES
5.1 Un état de contraintes en un point M d'une structure est défini dans les axes (Mxyz) par :
30 10 0( ) 10 10 0 MPa
0 0 5M
⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥⎣ ⎦
σ .
Déterminer les valeurs des contraintes principales en M et les directions prin-cipales des contraintes.
Exprimer le vecteur contrainte ( , )t M n qui s'exerce au point M sur la surface unité d'orientation n de composantes ( , , )x y zn n n par rapport aux axes (Mxyz).
Étudier le cas où la surface unité est orthogonale à Mx ; orthogonale à My ; orthogonale à Mz .
Trouver la valeur maximale de la contrainte tangentielle et les directions des surfaces correspondantes.
5.2 Exprimer les matrices σT de changement de base des contraintes, dans le cas où la direction 3e est inversée : ( ) ( )1 2 3 1 2 3, , , , e e e e e e→ − ; puis dans le cas où
la direction 2e est inversée : ( ) ( )1 2 3 1 2 3, , , , e e e e e e→ − .
5.3 Dans le cas d'un état de contraintes planes dans le plan (1, 2), expliciter la matrice 3 × 3 de changement de base, dans le cas d'une rotation θ autour de la direction 3.