Embed Size (px)
Citation preview
CI-5 MODÉLISER LES ACTIONS MÉCANIQUES
PRÉVOIR ET VÉRIFIER LES PERFORMANCES DE SYSTÈMES
SOUMIS À DES ACTIONS MÉCANIQUES STATIQUES.
Objectifs ANALYSER-MODELISER-RESOUDRE-OPTIMISERA la fin de la séquence,
• B2 : Proposer un modèle de connaissance et de comportement
Associer un modèle à une action mécanique
Déterminer la relation entre le modèle local et le modèle global
Associer à chaque liaison son torseur d’actions mécaniques transmissibles
• C1 : Proposer une démarche de résolution
Choisir une méthode pour déterminer la valeur des paramètres conduisant à des positions d’équilibre
• C2 : Procéder à la mise en oeuvre d’une démarche de résolution analytique
Déterminer le calcul complet des inconnues de liaison
Déterminer la valeur des paramètres conduisant à des positions d’équilibre (par exemple l’arc-boutement)
Table des matières1 Modélisation d’une action mécanique 2
1.1 Définition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.2 Notion de force . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3 Notion de moment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.4 Torseur d’action mécanique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.5 Cas particuliers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 Actions mécaniques transmissibles par une liaison parfaite 32.1 Rappels sur les liaisons parfaites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.2 Analyse de la liaison pivot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.3 Tableau des liaisons usuelles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.4 Moyen mnémotechnique de retrouver les torseurs des liaisons parfaites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.5 Modélisation plane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3 Actions mécaniques particulières 63.1 Pesanteur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63.2 Pression hydrostatique d’un fluide sur un solide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
4 Lois de Coulomb 74.1 Lois de Coulomb (ou loi du frottement) pour un contact ponctuel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74.2 Lois de Coulomb pour un contact non ponctuel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
5 Principe Fondamental de la Statique (PFS) 105.1 Isolement d’un solide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105.2 Action mécanique extérieure / intérieure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115.3 Enoncé du PFS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125.4 Théorèmes généraux de la statique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125.5 Théorèmes des actions réciproques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135.6 Système soumis à l’action de 2 glisseurs (forces) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135.7 Système soumis à l’action de 3 glisseurs (forces) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
6 Liaisons équivalentes 156.1 Liaisons en parallèle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156.2 Liaison en série . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
7 Résolution d’un problème de statique 167.1 Hypothèses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167.2 Algorithme de résolution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167.3 Résolution d’un problème de statique plan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177.4 Exemple de statique graphique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
8 Tableau des liaisons normalisées 18
LYCÉE CARNOT (DIJON) MPSI -PCSI GERMAIN GONDOR
1. MODÉLISATION D’UNE ACTION MÉCANIQUE 2/20
1 Modélisation d’une action mécanique
1.1 Définition
DÉFINITION: Action mécaniqueToute cause susceptible de
• maintenir un corps au repos
• créer un mouvement
• déformer un corps
On distingue deux types d’actions mécaniques :• les actions mécaniques de contact (liaison de contact entre solides, pression,. . . .)
• les actions mécaniques à distance (champ de pesanteur, force électromagnétique,. . . )
1.2 Notion de force
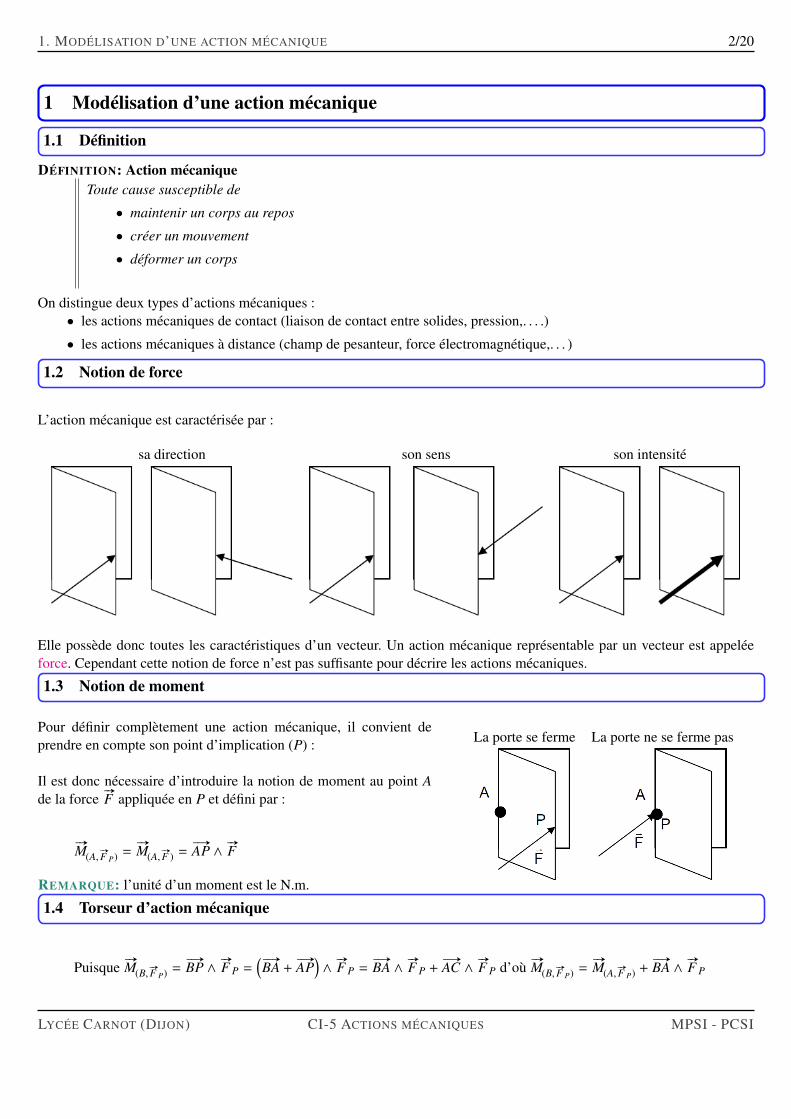
L’action mécanique est caractérisée par :
sa direction son sens son intensité
Elle possède donc toutes les caractéristiques d’un vecteur. Un action mécanique représentable par un vecteur est appeléeforce. Cependant cette notion de force n’est pas suffisante pour décrire les actions mécaniques.
1.3 Notion de moment
Pour définir complètement une action mécanique, il convient deprendre en compte son point d’implication (P) :
Il est donc nécessaire d’introduire la notion de moment au point Ade la force
#»F appliquée en P et défini par :
#»M(A,
#»F P) =
#»M(A,
#»F ) =
# »AP ∧
#»F
REMARQUE: l’unité d’un moment est le N.m.
La porte se ferme La porte ne se ferme pas
1.4 Torseur d’action mécanique
Puisque#»M(B,
#»F P) =
# »BP ∧
#»F P =
(# »BA +
# »AP
)∧
#»F P =
# »BA ∧
#»F P +
# »AC ∧
#»F P d’où
#»M(B,
#»F P) =
#»M(A,
#»F P) +
# »BA ∧
#»F P
LYCÉE CARNOT (DIJON) CI-5 ACTIONS MÉCANIQUES MPSI - PCSI
2. ACTIONS MÉCANIQUES TRANSMISSIBLES PAR UNE LIAISON PARFAITE 3/20
Le champ des moments d’une force est donc. . . un champ de moments ! ! Il est donc représentable par un torseur avec comme
vecteur résultante, la force appliquée#»F P :
F#»
FP→Σ
=
M
#»F P
#»M(M,
#»FP)
Dans le cas général d’un système S soumis à une force#»F , le torseur
F#»
F→S
de l’action mécanique créée par cette force
s’écrit : F#»
F→S
=
M
#»
R #»F→S
# »
M(M,#»F→S )
=
M
X LY MZ N
B
Lorsqu’il y a plusieurs actions mécaniques, on additionne les torseurs (attention au point où on additionne les torseurs)
F∑
i
[#»Fi
]→Σ
=
∑i
M
#»
R #»Fi→Σ
# »
M(M,#»Fi→Σ)
=
M
∑
i
[#»
R #»Fi→Σ
]∑
i
[ # »
M(M,#»Fi→Σ)
]
1.5 Cas particuliers
1.5.1 Torseur couple
Un torseur couple est de la formeF#»
F→S
=
M
#»0
# »
M(M,#»F→S )
avec# »
M(M,#»F→S ) ,
#»0 .
1.5.2 Torseur glisseur
Un torseur glisseur est de la formeF#»
F→S
=
A
#»
R #»F→S#»0
avec ∀M,
# »
M(M,#»F→S ).
#»
R #»F→S = 0.
L’action mécanique d’une force#»F appliquée en un point A est modélisable par un glisseur.
DÉMONSTRATION :# »
M(M,#»F→S ).
#»
R #»F→S =
[# »
M(A,#»F→S ) +
# »MA ∧
#»
R #»F→S
].
#»
R #»F→S =
[# »MA ∧
#»
R #»F→S
].
#»
R #»F→S = 0
2 Actions mécaniques transmissibles par une liaison parfaite
2.1 Rappels sur les liaisons parfaites
Ces liaisons parfaites ont les caractéristiques suivantes :• Les pièces mécaniques sont des solides indéformables.
• Les surfaces sont géométriquement parfaites.
• Les jeux sont nuls
• Le contact est sans frottement ni adhérence.
LYCÉE CARNOT (DIJON) CI-5 ACTIONS MÉCANIQUES MPSI - PCSI

2. ACTIONS MÉCANIQUES TRANSMISSIBLES PAR UNE LIAISON PARFAITE 4/20
2.2 Analyse de la liaison pivot
Une liaison pivot d’axe (O, #»x ) permet un mouvement de rotation, autour de cet axe, entre deux solides S i et S k. Sa réalisa-tion se fait essentiellement par un couple de surfaces cylindriques de révolution, avec éventuellement des paliers lisses oudes roulements, et des arrêts axiaux.
Projection orthogonale#»z
#»xS kS i
Perspective
Sa schématisation (norme NF E 04-015) est donnéeci-contre.
En tout point de l’axe (O, #»x ), donc en particulier au point O, les élémentsde réduction du torseur cinématique associé s’écrivent :
VS k/S i
=
O
#»
Ω(k/i)
ωx
00
#»V(O,S k/S i)
000
Considérer une liaison pivot d’axe (O, #»x ) entre deux solides revient à considérer, d’un point de vue mathématique, lessurfaces de liaison comme des surfaces de révolution non cylindriques d’axe (O, #»x ) :
La densité surfacique d#»F l(S i 7→ S k) rencontre l’axe (O, #»x ) en H, donc son moment en O a une projection nulle sur l’axe
(O, #»x ). En effet# »
M(O,S i→S k).#»X =
[# »OIl ∧ d
#»F l(S i 7→ S k)
].
#»X
=[
# »OH ∧ d
#»F l(S i 7→ S k)
].
#»X︸ ︷︷ ︸
0
+[
# »HIl ∧ d
#»F l(S i 7→ S k)
]︸ ︷︷ ︸#»0
.#»X = 0
d’après les conditions de nullité du produit vectoriel et du produit mixte. Par conséquent le torseur d’inter-efforts transmis-sibles par la liaison pivot d’axe (O,
#»X ) entre les deux solides S i et S k s’écrit :
FS k→S i
=
O
#»
RS i→S k
XYZ
# »
M(O,S k→S i)
0MN
La forme de ce torseur est conservée en tout point de l’axe (O,
#»X ).
LYCÉE CARNOT (DIJON) CI-5 ACTIONS MÉCANIQUES MPSI - PCSI

2. ACTIONS MÉCANIQUES TRANSMISSIBLES PAR UNE LIAISON PARFAITE 5/20
2.3 Tableau des liaisons usuelles
Une étude semblable peut être faite pour toutes les liaisons usuelles. Le tableau des liaisons et de leur torseur d’action trans-missible est porté en dernières pages.
2.4 Moyen mnémotechnique de retrouver les torseurs des liaisons parfaites
Nous verrons dans le programme de deuxième année que la liaison étant parfaite, la puissance des efforts intérieurs à la
liaison sont nuls. Le comoment du torseur cinématique
VS 2/S 1
et du torseur des actions mécaniques
FS 2→S 1
est donc nul.
#»
RS 2→S 1 .#»V(A,S 2/S 1) +
#»
Ω(S 2/S 1).# »
M(A,S 2→S 1) = 0
X10u10 + Y10v10 + Z10w10 + L10 p10 + M10q10 + N10r10 = 0
On peut en déduire que le produit scalaire du vecteur résultante des actions mécaniques et du vecteur vitesse entre les so-lides est nul. Il en est de même pour le produit scalaire du moment des actions mécaniques et du vecteur rotation entre lessolides. Ainsi, il convient de remplacer de façon duale les zéros du torseur cinématique pour obtenir le torseur des actionsmécaniques et inversement. Attention toute fois à ne pas se tromper de colonne et dans le cas de la liaison hélicoïdale !
Par exemple pour la liaison pivot :VS 2/S 1
=
A
ω21 00 00 0
R
⇒
A
X 0Y MZ N
R
=
FS 2→S 1
• X, Y et Z sont les composantes de
#»
RS 2→S 1 dans le repère R .
• L, M et N sont les composantes de# »
M(A,S 2→S 1) dans le repère R , avec L = 0.
Physiquement, cela se comprend car si on applique une force ou un moment selon une certaine direction à une des pièces,cette force (ou ce moment) ne peut pas être transmise à l’autre pièce si il y a un mouvement possible entre les deux danscette même direction.
2.5 Modélisation plane
ddl Nom de la liaison SchématisationCaractéristique
géométrique
Torseur cinématique
V1/0
=
X
#»Ω(S 1/S 0)
#»V(X,S 1/S 0)
Torseur desactions mécaniques
transmissibles
0 ddl0 tr0 rt
Encastrement ∀M ∈ (ε)M
− 0− 00 −
R0 M
X10 −Y10 −− N10
R0
1 ddl1 tr0 rt
Glissière1 direction #»x∀M ∈ (ε)
M
− u10− 00 −
R0 M
0 −Y10 −− N10
R0
1 ddl0 tr1 rt
Pivot1 axe (A, #»z )∀M ∈ (A, #»z )
M
− 0− 0r10 −
R0 M
X10 −Y10 −− 0
R0
2 ddl1 tr1 rt
Ponctuelle planeNormal au plan
#»y , point decontact A A
− u10− 0r10 −
R0 A
0 −Y10 −− 0
R0
LYCÉE CARNOT (DIJON) CI-5 ACTIONS MÉCANIQUES MPSI - PCSI
3. ACTIONS MÉCANIQUES PARTICULIÈRES 6/20
Dans un problème considéré comme plan, un solide S k possède au maximum trois degrés de liberté par rapport à un repèrede référence Ri. Quatre modèles de liaisons, correspondant à des formes particulières du torseur cinématique, peuvent êtreretenus.
Dans une modélisation plane, les forces appartiennent toutes à un même plan ou sont parallèles à ce plan, les couples étantperpendiculaires à ce plan. Pour chaque liaison, connaissant les mouvement effectifs permis, il est aisé de déterminer letorseur des inter-efforts transmissibles. Il est également possible d’utiliser la relation :
X10.u10 + Y10.v10 + Z10.w10 + L10.p10 + M10.q10 + N10.r10 = 0
ramenée à un problème plan soit : X10.u10 + Y10.v10 + N10.r10 = 0 . Nous obtenons donc le tableau précédant.
3 Actions mécaniques particulières
3.1 Pesanteur
Un point matériel que l’on lâche au voisinage de la surface de la terre tombe. Sa trajectoire est rectiligne et verticale. Ledéplacement a lieu de haut en bas avec une accélération constante par rapport à la terre : g = 9, 81 m.s−2.
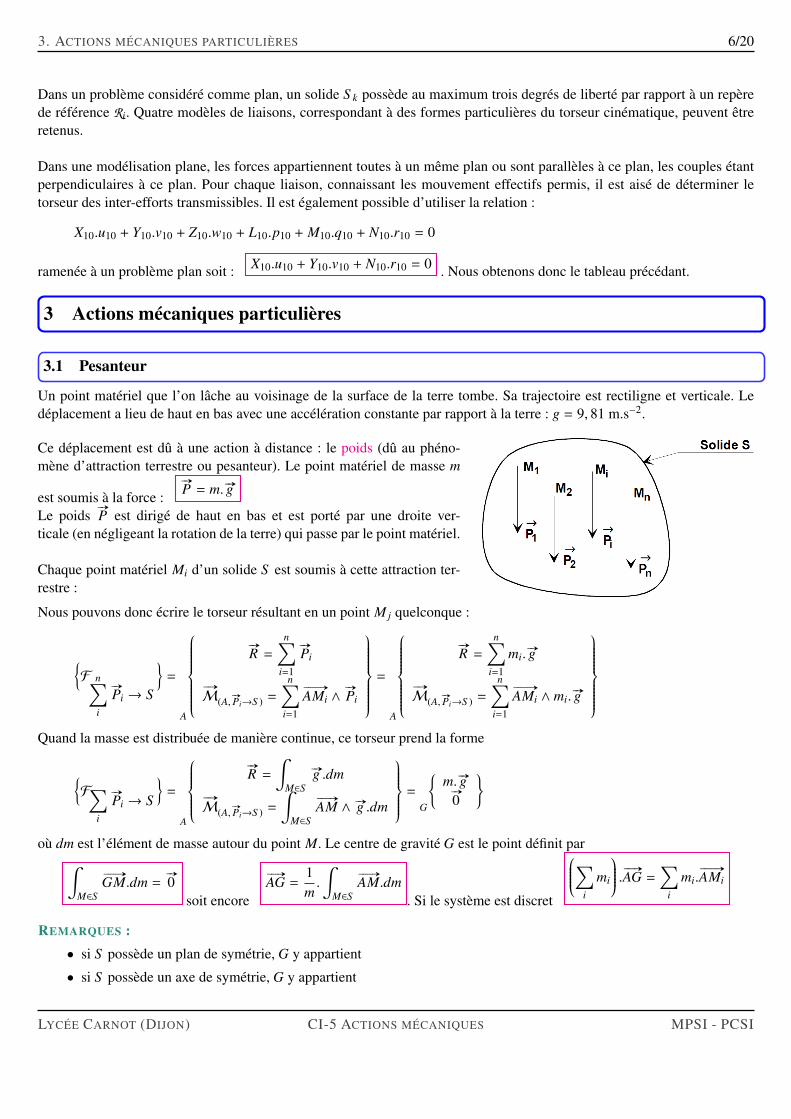
Ce déplacement est dû à une action à distance : le poids (dû au phéno-mène d’attraction terrestre ou pesanteur). Le point matériel de masse m
est soumis à la force :#»P = m. #»g
Le poids#»P est dirigé de haut en bas et est porté par une droite ver-
ticale (en négligeant la rotation de la terre) qui passe par le point matériel.
Chaque point matériel Mi d’un solide S est soumis à cette attraction ter-restre :
Nous pouvons donc écrire le torseur résultant en un point M j quelconque :
F n∑
i
#»Pi → S
=
A
#»R =
n∑i=1
#»Pi
# »
M(A,#»Pi→S ) =
n∑i=1
# »AMi ∧
#»Pi
=
A
#»R =
n∑i=1
mi.#»g
# »
M(A,#»Pi→S ) =
n∑i=1
# »AMi ∧ mi.
#»g
Quand la masse est distribuée de manière continue, ce torseur prend la forme
F∑
i
#»Pi → S
=
A
#»R =
∫M∈S
#»g .dm
# »
M(A,#»Pi→S ) =
∫M∈S
# »AM ∧ #»g .dm
=G
m. #»g
#»0
où dm est l’élément de masse autour du point M. Le centre de gravité G est le point définit par∫M∈S
# »GM.dm =
#»0
soit encore
# »AG =
1m.
∫M∈S
# »AM.dm
. Si le système est discret
∑i
mi
. # »AG =
∑i
mi.# »AMi
REMARQUES :• si S possède un plan de symétrie, G y appartient
• si S possède un axe de symétrie, G y appartient
LYCÉE CARNOT (DIJON) CI-5 ACTIONS MÉCANIQUES MPSI - PCSI
4. LOIS DE COULOMB 7/20
• si S possède un centre de symétrie, G est confondu avec ce centre.
3.2 Pression hydrostatique d’un fluide sur un solide
Soit p(M) la pression en un point M d’un fluide. Le fluide est en contact sur lasurface Σ avec le solide S . On a alors :
Ff luide→S
=
O
"
M∈Σp(M). #»n (M).dΣ"
M∈Σ
# »OM ∧ (p(M). #»n (M)) .dΣ
Où #»n (M) est la normale en M dirigée vers l’extérieur du solide S . La pressionexerce une densité de force localement normale à la paroi.
M
#» n(M
)
p(M). #»n (M)
N
#»n (N)
p(N).
#»n (N)
4 Lois de Coulomb
4.1 Lois de Coulomb (ou loi du frottement) pour un contact ponctuel
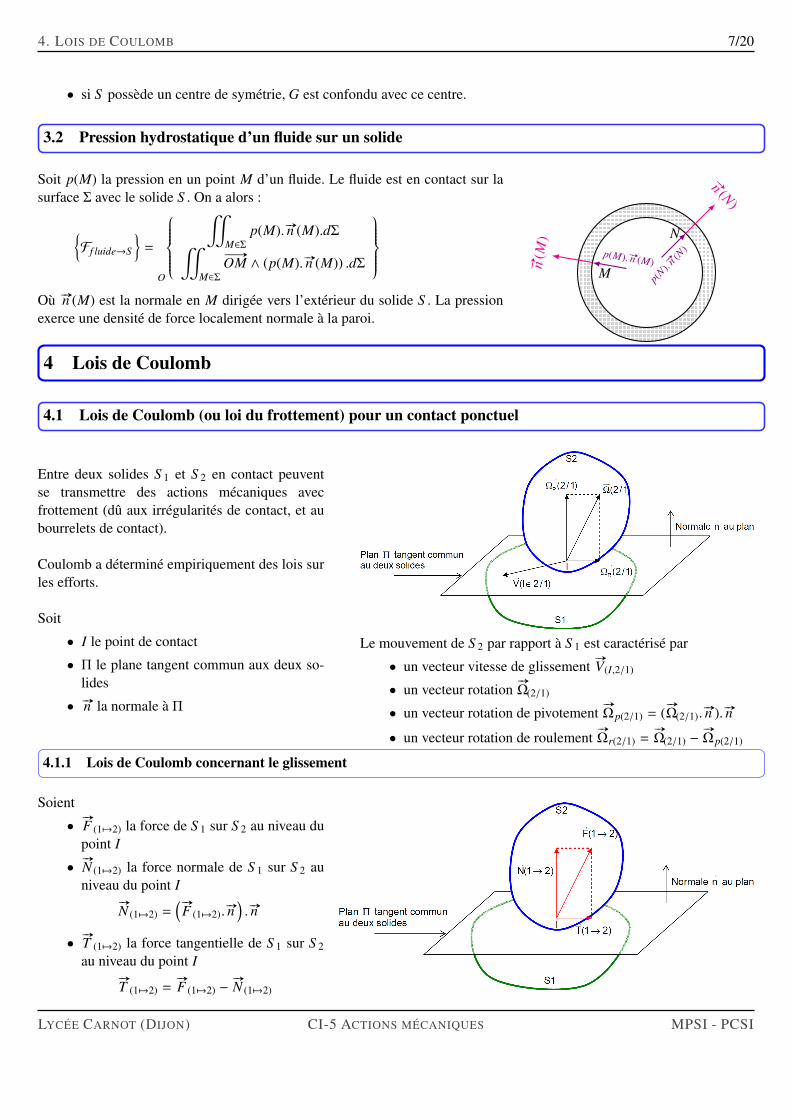
Entre deux solides S 1 et S 2 en contact peuventse transmettre des actions mécaniques avecfrottement (dû aux irrégularités de contact, et aubourrelets de contact).
Coulomb a déterminé empiriquement des lois surles efforts.
Soit
• I le point de contact
• Π le plane tangent commun aux deux so-lides
• #»n la normale à Π
Le mouvement de S 2 par rapport à S 1 est caractérisé par
• un vecteur vitesse de glissement#»V(I,2/1)
• un vecteur rotation#»
Ω(2/1)
• un vecteur rotation de pivotement#»
Ωp(2/1) = (#»
Ω(2/1).#»n ). #»n
• un vecteur rotation de roulement#»
Ωr(2/1) =#»
Ω(2/1) −#»
Ωp(2/1)
4.1.1 Lois de Coulomb concernant le glissement
Soient
•#»F (17→2) la force de S 1 sur S 2 au niveau dupoint I
•#»N (17→2) la force normale de S 1 sur S 2 auniveau du point I
#»N (17→2) =
(#»F (17→2).
#»n). #»n
•#»T (17→2) la force tangentielle de S 1 sur S 2au niveau du point I
#»T (17→2) =
#»F (1 7→2) −
#»N (17→2)
LYCÉE CARNOT (DIJON) CI-5 ACTIONS MÉCANIQUES MPSI - PCSI
4. LOIS DE COULOMB 8/20
Les lois de Coulomb spécifient que :
• s’il y a glissement au contact entre S 1 et S 2 :#»V(I,2/1) ,
#»0 ⇒
#»T (17→2) ∧
#»V(I,2/1) =
#»0
#»T (17→2).
#»V(I,2/1) < 0∥∥∥ #»
T (17→2)∥∥∥ = f .
∥∥∥ #»N (17→2)
∥∥∥• s’il y a adhérence au contact entre S 1 et S 2 :
#»V(I,2/1) =
#»0 ⇒
∥∥∥ #»T (17→2)
∥∥∥ ≤ f .∥∥∥ #»
N (17→2)∥∥∥
où f est le coefficient de frottement entre S 1 et S 2.
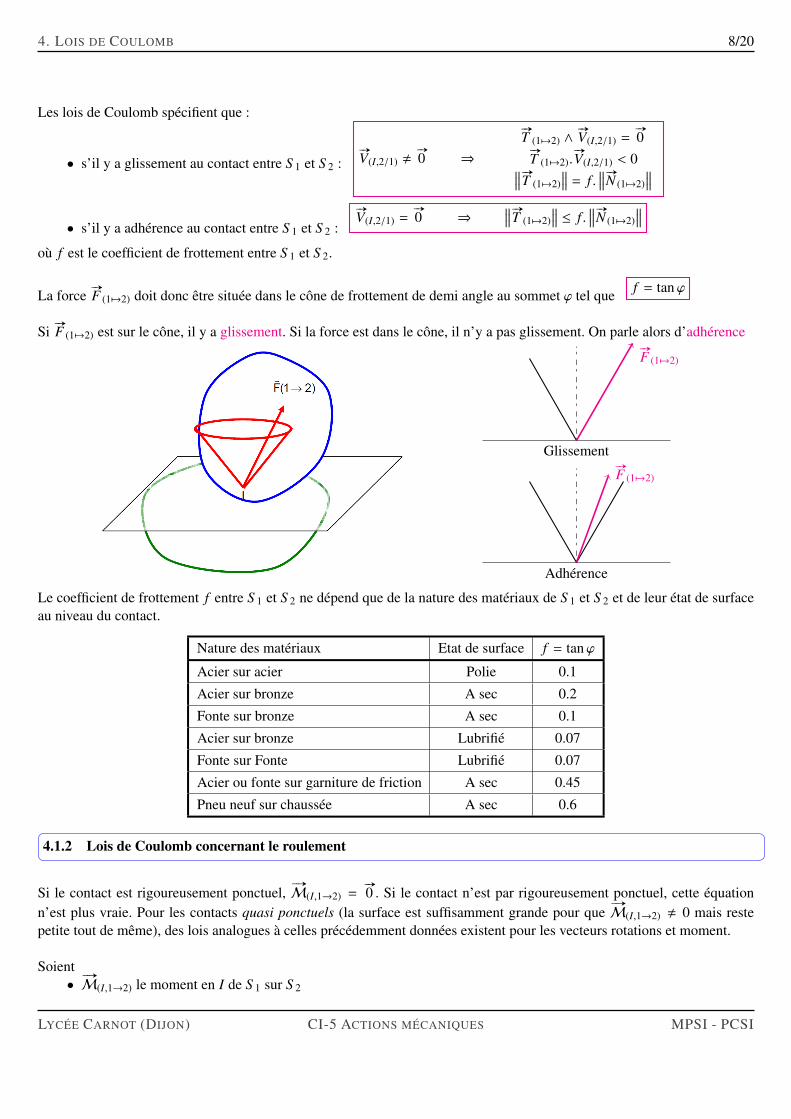
La force#»F (17→2) doit donc être située dans le cône de frottement de demi angle au sommet ϕ tel que f = tanϕ
Si#»F (17→2) est sur le cône, il y a glissement. Si la force est dans le cône, il n’y a pas glissement. On parle alors d’adhérence
#»F (17→2)
Glissement#»F (17→2)
Adhérence
Le coefficient de frottement f entre S 1 et S 2 ne dépend que de la nature des matériaux de S 1 et S 2 et de leur état de surfaceau niveau du contact.
Nature des matériaux Etat de surface f = tanϕ
Acier sur acier Polie 0.1
Acier sur bronze A sec 0.2
Fonte sur bronze A sec 0.1
Acier sur bronze Lubrifié 0.07
Fonte sur Fonte Lubrifié 0.07
Acier ou fonte sur garniture de friction A sec 0.45
Pneu neuf sur chaussée A sec 0.6
4.1.2 Lois de Coulomb concernant le roulement
Si le contact est rigoureusement ponctuel,# »
M(I,1→2) =#»0 . Si le contact n’est par rigoureusement ponctuel, cette équation
n’est plus vraie. Pour les contacts quasi ponctuels (la surface est suffisamment grande pour que# »
M(I,1→2) , 0 mais restepetite tout de même), des lois analogues à celles précédemment données existent pour les vecteurs rotations et moment.
Soient•
# »
M(I,1→2) le moment en I de S 1 sur S 2
LYCÉE CARNOT (DIJON) CI-5 ACTIONS MÉCANIQUES MPSI - PCSI
4. LOIS DE COULOMB 9/20
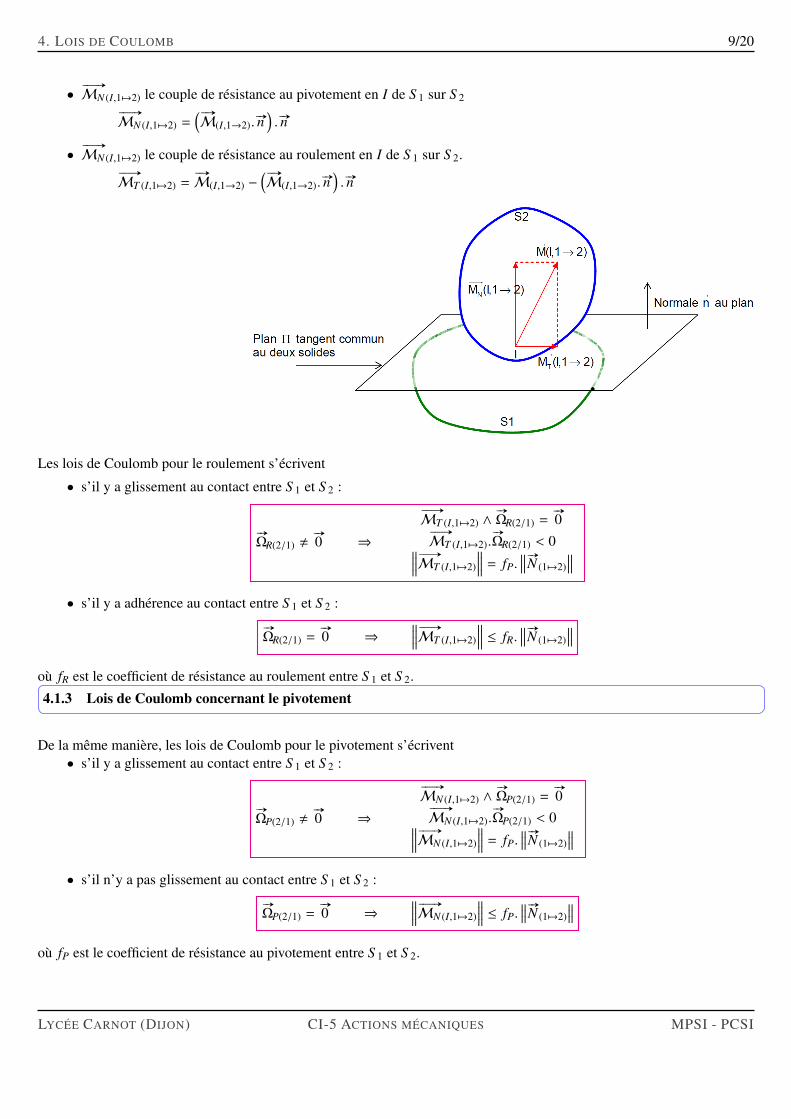
•# »
MN (I,17→2) le couple de résistance au pivotement en I de S 1 sur S 2# »
MN (I,17→2) =( # »
M(I,1→2).#»n). #»n
•# »
MN (I,1 7→2) le couple de résistance au roulement en I de S 1 sur S 2.# »
MT (I,17→2) =# »
M(I,1→2) −( # »
M(I,1→2).#»n). #»n
Les lois de Coulomb pour le roulement s’écrivent
• s’il y a glissement au contact entre S 1 et S 2 :
#»
ΩR(2/1) ,#»0 ⇒
# »
MT (I,17→2) ∧#»
ΩR(2/1) =#»0
# »
MT (I,17→2).#»
ΩR(2/1) < 0∥∥∥∥ # »
MT (I,17→2)
∥∥∥∥ = fP.∥∥∥ #»
N (17→2)∥∥∥
• s’il y a adhérence au contact entre S 1 et S 2 :
#»
ΩR(2/1) =#»0 ⇒
∥∥∥∥ # »
MT (I,17→2)
∥∥∥∥ ≤ fR.∥∥∥ #»
N (17→2)∥∥∥
où fR est le coefficient de résistance au roulement entre S 1 et S 2.
4.1.3 Lois de Coulomb concernant le pivotement
De la même manière, les lois de Coulomb pour le pivotement s’écrivent• s’il y a glissement au contact entre S 1 et S 2 :
#»
ΩP(2/1) ,#»0 ⇒
# »
MN (I,17→2) ∧#»
ΩP(2/1) =#»0
# »
MN (I,17→2).#»
ΩP(2/1) < 0∥∥∥∥ # »
MN (I,17→2)
∥∥∥∥ = fP.∥∥∥ #»
N (17→2)∥∥∥
• s’il n’y a pas glissement au contact entre S 1 et S 2 :
#»
ΩP(2/1) =#»0 ⇒
∥∥∥∥ # »
MN (I,17→2)
∥∥∥∥ ≤ fP.∥∥∥ #»
N (17→2)∥∥∥
où fP est le coefficient de résistance au pivotement entre S 1 et S 2.
LYCÉE CARNOT (DIJON) CI-5 ACTIONS MÉCANIQUES MPSI - PCSI
5. PRINCIPE FONDAMENTAL DE LA STATIQUE (PFS) 10/20
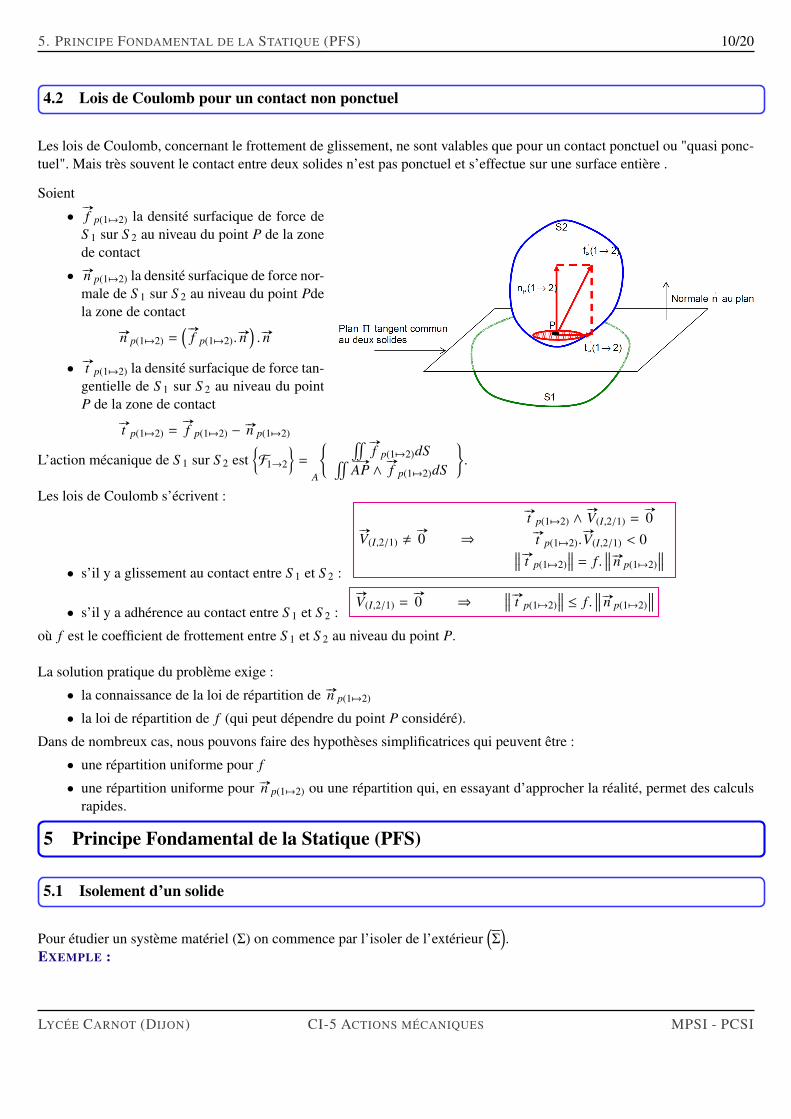
4.2 Lois de Coulomb pour un contact non ponctuel
Les lois de Coulomb, concernant le frottement de glissement, ne sont valables que pour un contact ponctuel ou "quasi ponc-tuel". Mais très souvent le contact entre deux solides n’est pas ponctuel et s’effectue sur une surface entière .
Soient
•#»f p(1 7→2) la densité surfacique de force de
S 1 sur S 2 au niveau du point P de la zonede contact
• #»n p(17→2) la densité surfacique de force nor-male de S 1 sur S 2 au niveau du point Pdela zone de contact
#»n p(17→2) =(
#»f p(17→2).
#»n). #»n
•#»t p(17→2) la densité surfacique de force tan-gentielle de S 1 sur S 2 au niveau du pointP de la zone de contact
#»t p(17→2) =#»f p(17→2) −
#»n p(17→2)
L’action mécanique de S 1 sur S 2 estF1→2
=
A
! #»f p(17→2)dS!
# »AP ∧
#»f p(17→2)dS
.
Les lois de Coulomb s’écrivent :
• s’il y a glissement au contact entre S 1 et S 2 :
#»V(I,2/1) ,
#»0 ⇒
#»t p(17→2) ∧#»V(I,2/1) =
#»0
#»t p(17→2).#»V(I,2/1) < 0∥∥∥ #»t p(1 7→2)
∥∥∥ = f .∥∥∥ #»n p(17→2)
∥∥∥• s’il y a adhérence au contact entre S 1 et S 2 :
#»V(I,2/1) =
#»0 ⇒
∥∥∥ #»t p(17→2)∥∥∥ ≤ f .
∥∥∥ #»n p(17→2)∥∥∥
où f est le coefficient de frottement entre S 1 et S 2 au niveau du point P.
La solution pratique du problème exige :
• la connaissance de la loi de répartition de #»n p(17→2)
• la loi de répartition de f (qui peut dépendre du point P considéré).
Dans de nombreux cas, nous pouvons faire des hypothèses simplificatrices qui peuvent être :
• une répartition uniforme pour f
• une répartition uniforme pour #»n p(17→2) ou une répartition qui, en essayant d’approcher la réalité, permet des calculsrapides.
5 Principe Fondamental de la Statique (PFS)
5.1 Isolement d’un solide
Pour étudier un système matériel (Σ) on commence par l’isoler de l’extérieur(Σ).
EXEMPLE :
LYCÉE CARNOT (DIJON) CI-5 ACTIONS MÉCANIQUES MPSI - PCSI
5. PRINCIPE FONDAMENTAL DE LA STATIQUE (PFS) 11/20
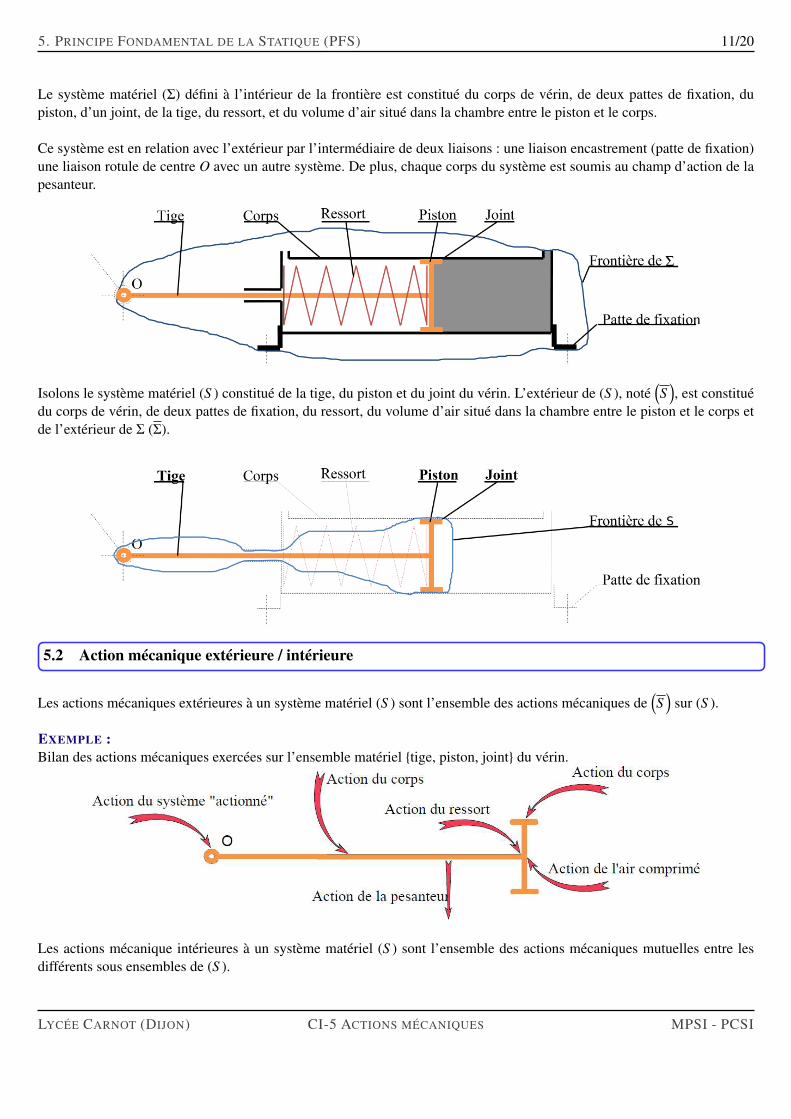
Le système matériel (Σ) défini à l’intérieur de la frontière est constitué du corps de vérin, de deux pattes de fixation, dupiston, d’un joint, de la tige, du ressort, et du volume d’air situé dans la chambre entre le piston et le corps.
Ce système est en relation avec l’extérieur par l’intermédiaire de deux liaisons : une liaison encastrement (patte de fixation)une liaison rotule de centre O avec un autre système. De plus, chaque corps du système est soumis au champ d’action de lapesanteur.
Isolons le système matériel (S ) constitué de la tige, du piston et du joint du vérin. L’extérieur de (S ), noté(S), est constitué
du corps de vérin, de deux pattes de fixation, du ressort, du volume d’air situé dans la chambre entre le piston et le corps etde l’extérieur de Σ (Σ).
5.2 Action mécanique extérieure / intérieure
Les actions mécaniques extérieures à un système matériel (S ) sont l’ensemble des actions mécaniques de(S)
sur (S ).
EXEMPLE :Bilan des actions mécaniques exercées sur l’ensemble matériel tige, piston, joint du vérin.
Les actions mécanique intérieures à un système matériel (S ) sont l’ensemble des actions mécaniques mutuelles entre lesdifférents sous ensembles de (S ).
LYCÉE CARNOT (DIJON) CI-5 ACTIONS MÉCANIQUES MPSI - PCSI

5. PRINCIPE FONDAMENTAL DE LA STATIQUE (PFS) 12/20
EXEMPLE : l’action mutuelle de la tige sur le piston, et l’action mutuelle du piston sur le joint.
5.3 Enoncé du PFS
Dans un repère galiléen Rg, si un système matériel (Σ) est en équilibre, l’ensemble des actions mécanique extérieures est nul.
(Σ) en équilibre dans Rg ⇒
F
Σ→Σ
=
A
#»
RΣ→Σ
# »
M(A,Σ→Σ)
=
0
REMARQUES :• Le Principe Fondamental de la Statique ne se démontre pas, c’est un cas particulier du Principe Fondamental de la
Dynamique (P.F.D).• Si un torseur est nul alors il est nul en tout point. Il n’est donc pas nécessaire d’imposer un point pour exprimer
le torseur des actions extérieures. Par contre, il est judicieux de choisir correctement ce point afin de simplifier aumaximum les calculs : en particulier ce point peut être l’origine d’une force inconnue.
• Les repères galiléens sont des repères où le PFS est vérifié. Pour des applications des systèmes mécaniques classiques(voiture, avion, machine,. . . ), la Terre est une bonne approximation d’un repère Galiléen.
• L’analyse de PFD montre qu’il est possible d’étendre le champ d’application du PFS à des systèmes mobiles dansles trois cas particuliers suivants : mouvement de translation uniforme mouvement de rotation uniforme d’un solide équilibré dynamiquement lorsque les effets des masses et des inerties peuvent être négligés devant les efforts extérieurs
• la réciproque du P.F.S n’est pas forcément juste.
EXEMPLE : : l’ensemble des actions extérieuressur le ciseau sont nulles, alors qu’il va se mettre àbouger.
5.4 Théorèmes généraux de la statique
Une égalité de torseur se traduit par deux égalités vectorielles. Dans un problème spatial, elle génère 6 équations scalairesmais dans un problème plan, seulement 3 équations scalaires. Ainsi, on déduit du principe fondamental de la dynamique lesdeux théorèmes suivants.5.4.1 Théorème de la résultante statique
Dans un repère galiléen Rg, si un système matériel (Σ) est en équilibre, la résultante statique#»
RΣ→Σ
est nulle :
#»
RΣ→Σ
= X. #»x + Y. #»y + Z. #»z =#»0 ⇒ X = 0, Y = 0, et Z = 0
5.4.2 Théorème du moment statique
Dans un repère galiléen Rg, si un système matériel (Σ) est en équilibre, le moment statique# »
M(M,Σ→Σ) est nulle pour toutpoint M de l’espace :
# »
M(M,Σ→Σ) = L. #»x + M. #»y + N. #»z =#»0 ⇒ L = 0, M = 0, et N = 0
LYCÉE CARNOT (DIJON) CI-5 ACTIONS MÉCANIQUES MPSI - PCSI

5. PRINCIPE FONDAMENTAL DE LA STATIQUE (PFS) 13/20
5.5 Théorèmes des actions réciproques
Soient deux systèmes distincts Σ1 et Σ2 (Σ1 ∩ Σ2 = ∅). Alors le théorème des actions réciproques énonce que les actionsmécaniques de Σ1 sur Σ2 sont opposées aux actions mécaniques de Σ2 sur Σ1
FΣ1→Σ2
= −
FΣ2→Σ1
DÉMONSTRATION :Soit Σ tel que Σ1 ∪ Σ2 = Σ. Les systèmes sont supposés être à l’équilibre dans le repère galiléen Rg.
Isolons Σ1. Le principe fondamental de la statique appliqué à Σ1 dans le repère galiléen Rg s’énonce :F
Σ→Σ1
+
FΣ2→Σ1
=
0
Isolons Σ2. Le principe fondamental de la statique appliqué à Σ2 dans le repère galiléen Rg s’énonce :F
Σ→Σ2
+
FΣ1→Σ2
=
0
Isolons enfin Σ. Le principe fondamental de la statique appliqué à Σ dans le repère galiléen Rg s’énonce :F
Σ→Σ
=
F
Σ→Σ1
+
F
Σ→Σ2
=
0
En retranchant la dernière équations à la sommes des deux premières :FΣ2→Σ1
+
FΣ1→Σ2
=
0
⇒
FΣ2→Σ1
= −
FΣ1→Σ2
5.6 Système soumis à l’action de 2 glisseurs (forces)
Le système (S ) est soumis à deux forces :#»F A appliquée en A et
#»F B appliquée en B. Le principe fondamental de la statique
nous permet d’écrire :
A
# »FA#»0
+
B
# »FB#»0
=
#»0#»0
⇔
A
# »FA#»0
+
A
# »FB
# »AB ∧
# »FB
=
#»0#»0
⇔
# »FA +
# »FB =
#»0
# »AB ∧
# »FB =
#»0⇔
# »FA = −
# »FB
∃ λ /# »AB = λ.
# »FB
# »FA
xA# »FB
xB
Lorsqu’un système en équilibre est soumis à deux forces, ces deux forces sont colinéaires, de même norme etopposées.
5.7 Système soumis à l’action de 3 glisseurs (forces)
Le système S est soumis à trois forces# »FA,
# »FB,
# »FC appliquées en A, B et C. Soit :
• aucune des forces n’est parallèle à une des deux autres forces,
• deux forces sont parallèles.
LYCÉE CARNOT (DIJON) CI-5 ACTIONS MÉCANIQUES MPSI - PCSI

5. PRINCIPE FONDAMENTAL DE LA STATIQUE (PFS) 14/20
5.7.1 Les forces ne sont pas parallèles
Le système S est soumis à trois forces# »FA,
# »FB,
# »FC appliquées en A, B et C. Le principe fondamental de la statique nous
permet d’écrire :
A
# »FA#»0
+
B
# »FB#»0
+
C
# »FC#»0
=
A
# »FA#»0
+
A
# »FB
# »AB ∧
# »FB
+
A
# »FC
# »AC ∧
# »FC
=
#»0#»0
⇔
# »FA +
# »FB +
# »FC =
#»0
# »AB ∧
# »FB +
# »AC ∧
# »FC =
#»0
Pour vérifier la deuxième équation, il faut que les deux vecteurs# »AB ∧
# »FB et
# »AC ∧
# »FC soient parallèles. Or
# »AB ∧
# »FB est
perpendiculaire au plan (P1) = (A, B,# »FB) et
# »AC ∧
# »FC est perpendiculaire au plan (P2) = (A,C,
# »FC). Ces deux plans doivent
donc être parallèles. A appartient aux deux plans (P1) et (P2), ces deux plans sont donc confondus. A, B, C,# »FB et
# »FC sont
dans un même plan.
# »FB et
# »FC sont coplanaires mais non parallèles, ils se coupent donc en un point I.
I
# »FA
# »IA ∧
# »FA
+
I
# »FB
# »IB ∧
# »FB
+
I
# »FC
# »IC ∧
# »FC
=
#»0#»0
⇔
# »FA +
# »FB +
# »FC =
#»0
# »IA ∧
# »FA =
#»0
Pour vérifier l’équation de moment, il faut que ∃λ ∈ R/# »FA = λ.
# »IA.
Pour qu’un solide S soumis à trois forces non parallèles soit en équilibre, ilfaut que ces trois forces soient coplanaires, concourantes et de somme nulle.
5.7.2 Deux forces sont parallèles
++
+A
B
C# »FC
# »FB
++
+A
B
C# »FC
# »FB
# »FB
# »FC
# »FA
# »FB et
# »FC sont parallèles. B, C,
# »FB et
# »FC sont donc coplanaires. Le principe fondamental de la statique nous permet d’écrire :
A
# »FA#»0
+
B
# »FB#»0
+
C
# »FC#»0
=
A
# »FA#»0
+
A
# »FB
# »AB ∧
# »FB
+
A
# »FC
# »AC ∧
# »FC
=
0
⇔
# »FA +
# »FB +
# »FC =
#»0
# »AB ∧
# »FB +
# »AC ∧
# »FC =
#»0
Pour vérifier l’équation de la résultante, il faut que# »FA soit aussi parallèle à
# »FB et
# »FC .
Pour vérifier l’équation du moment, il faut que A appartienne au plan B, C,# »FB et
# »FC .
xx
xA
B
C# »FC
# »FB
xx
xA
B
C
# »FC
# »FB
# »FC # »
FB
# »FA
xx
xA
B
C
# »FA
# »FB
# »FC
LYCÉE CARNOT (DIJON) CI-5 ACTIONS MÉCANIQUES MPSI - PCSI
6. LIAISONS ÉQUIVALENTES 15/20
Lorsqu’un solide (S) en équilibre est soumis à trois forces dont deux d’entre elles sont parallèles, il faut que latroisième soit coplanaire et parallèle et que la somme des trois forces soit nulle ainsi que le moment de ces troisforces.
5.7.3 Bilan
Pour qu’un solide soumis à trois forces soit en équilibre par rapport à un repère galiléen, il faut et il suffit que ces forcessoient :
• coplanaires,• parallèles ou concourantes,• à somme nulle et à somme des moments nulle.
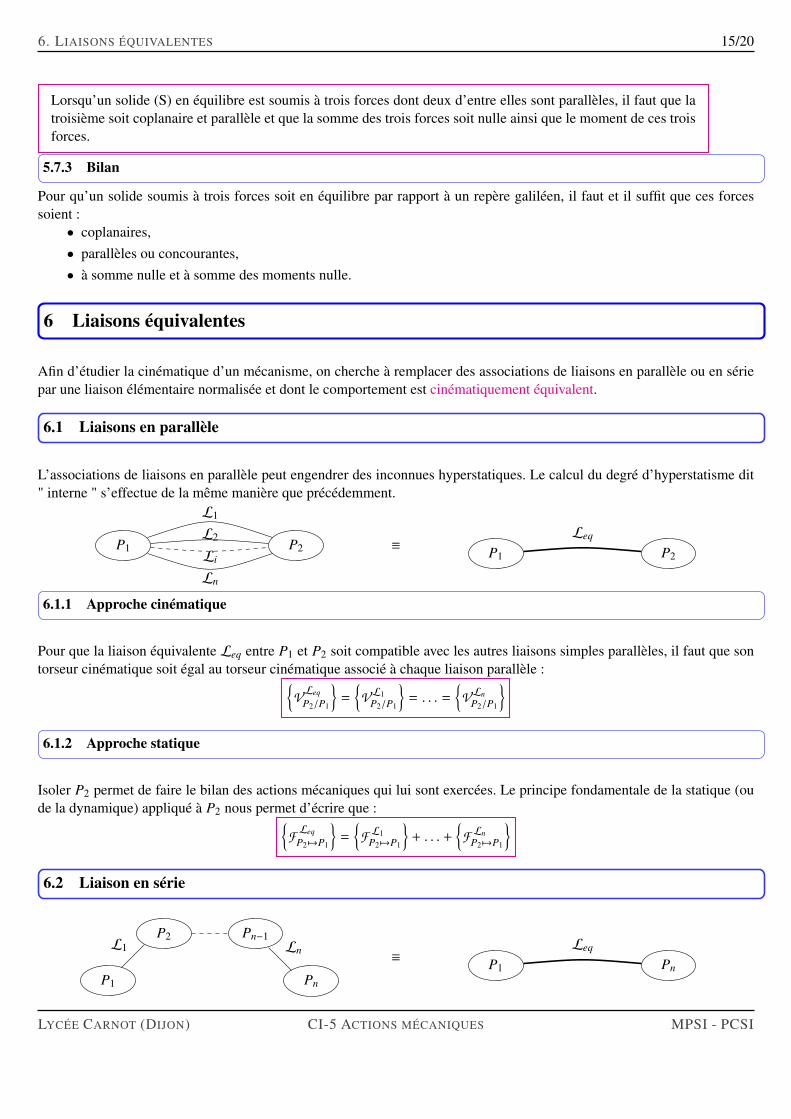
6 Liaisons équivalentes
Afin d’étudier la cinématique d’un mécanisme, on cherche à remplacer des associations de liaisons en parallèle ou en sériepar une liaison élémentaire normalisée et dont le comportement est cinématiquement équivalent.
6.1 Liaisons en parallèle
L’associations de liaisons en parallèle peut engendrer des inconnues hyperstatiques. Le calcul du degré d’hyperstatisme dit" interne " s’effectue de la même manière que précédemment.
P1 P2
L1
L2
Li
Ln
≡ P1 P2
Leq
6.1.1 Approche cinématique
Pour que la liaison équivalente Leq entre P1 et P2 soit compatible avec les autres liaisons simples parallèles, il faut que sontorseur cinématique soit égal au torseur cinématique associé à chaque liaison parallèle :
V Leq
P2/P1
=
V L1
P2/P1
= . . . =
V Ln
P2/P1
6.1.2 Approche statique
Isoler P2 permet de faire le bilan des actions mécaniques qui lui sont exercées. Le principe fondamentale de la statique (oude la dynamique) appliqué à P2 nous permet d’écrire que :
F LeqP2 7→P1
=
F L1
P2 7→P1
+ . . . +
F Ln
P2 7→P1
6.2 Liaison en série
P1
L1P2 Pn−1
Ln
Pn
≡ P1 Pn
Leq
LYCÉE CARNOT (DIJON) CI-5 ACTIONS MÉCANIQUES MPSI - PCSI
7. RÉSOLUTION D’UN PROBLÈME DE STATIQUE 16/20
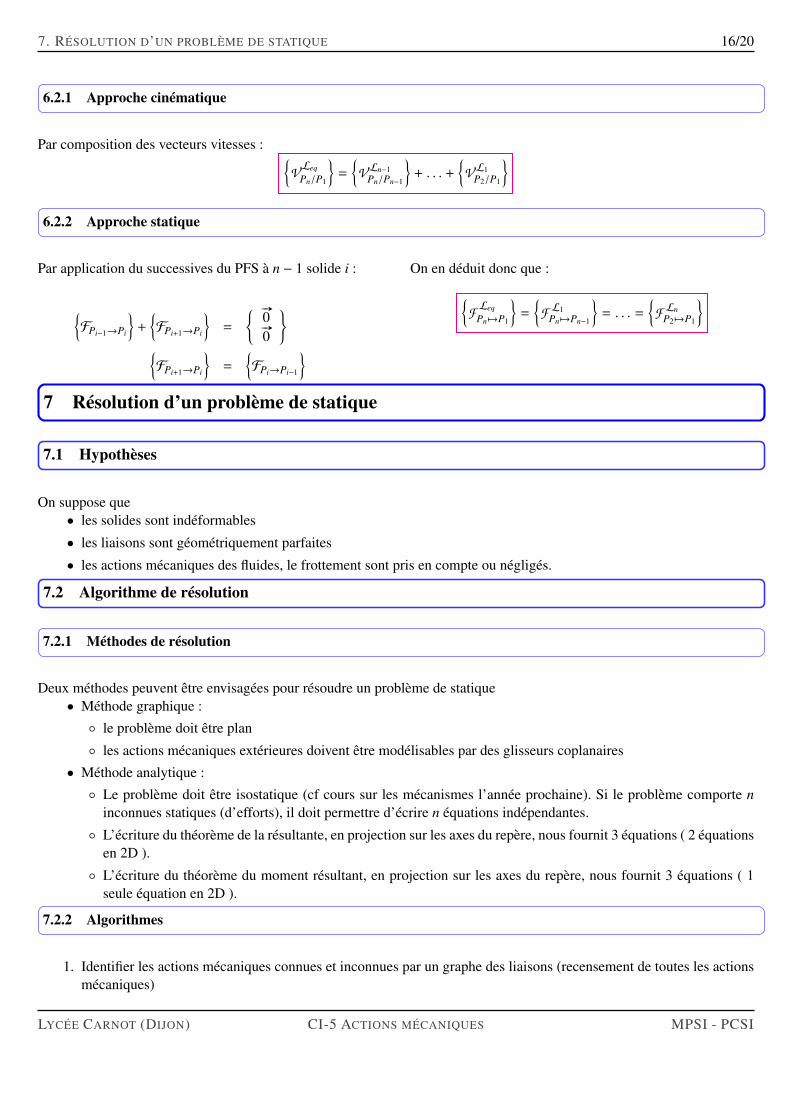
6.2.1 Approche cinématique
Par composition des vecteurs vitesses : V Leq
Pn/P1
=
V Ln−1
Pn/Pn−1
+ . . . +
V L1
P2/P1
6.2.2 Approche statique
Par application du successives du PFS à n − 1 solide i :
FPi−1→Pi
+
FPi+1→Pi
=
#»0#»0
FPi+1→Pi
=
FPi→Pi−1
On en déduit donc que :
F Leq
Pn 7→P1
=
F L1
Pn 7→Pn−1
= . . . =
F Ln
P2 7→P1
7 Résolution d’un problème de statique
7.1 Hypothèses
On suppose que• les solides sont indéformables
• les liaisons sont géométriquement parfaites
• les actions mécaniques des fluides, le frottement sont pris en compte ou négligés.
7.2 Algorithme de résolution
7.2.1 Méthodes de résolution
Deux méthodes peuvent être envisagées pour résoudre un problème de statique• Méthode graphique :
le problème doit être plan
les actions mécaniques extérieures doivent être modélisables par des glisseurs coplanaires
• Méthode analytique :
Le problème doit être isostatique (cf cours sur les mécanismes l’année prochaine). Si le problème comporte ninconnues statiques (d’efforts), il doit permettre d’écrire n équations indépendantes.
L’écriture du théorème de la résultante, en projection sur les axes du repère, nous fournit 3 équations ( 2 équationsen 2D ).
L’écriture du théorème du moment résultant, en projection sur les axes du repère, nous fournit 3 équations ( 1seule équation en 2D ).
7.2.2 Algorithmes
1. Identifier les actions mécaniques connues et inconnues par un graphe des liaisons (recensement de toutes les actionsmécaniques)
LYCÉE CARNOT (DIJON) CI-5 ACTIONS MÉCANIQUES MPSI - PCSI
7. RÉSOLUTION D’UN PROBLÈME DE STATIQUE 17/20
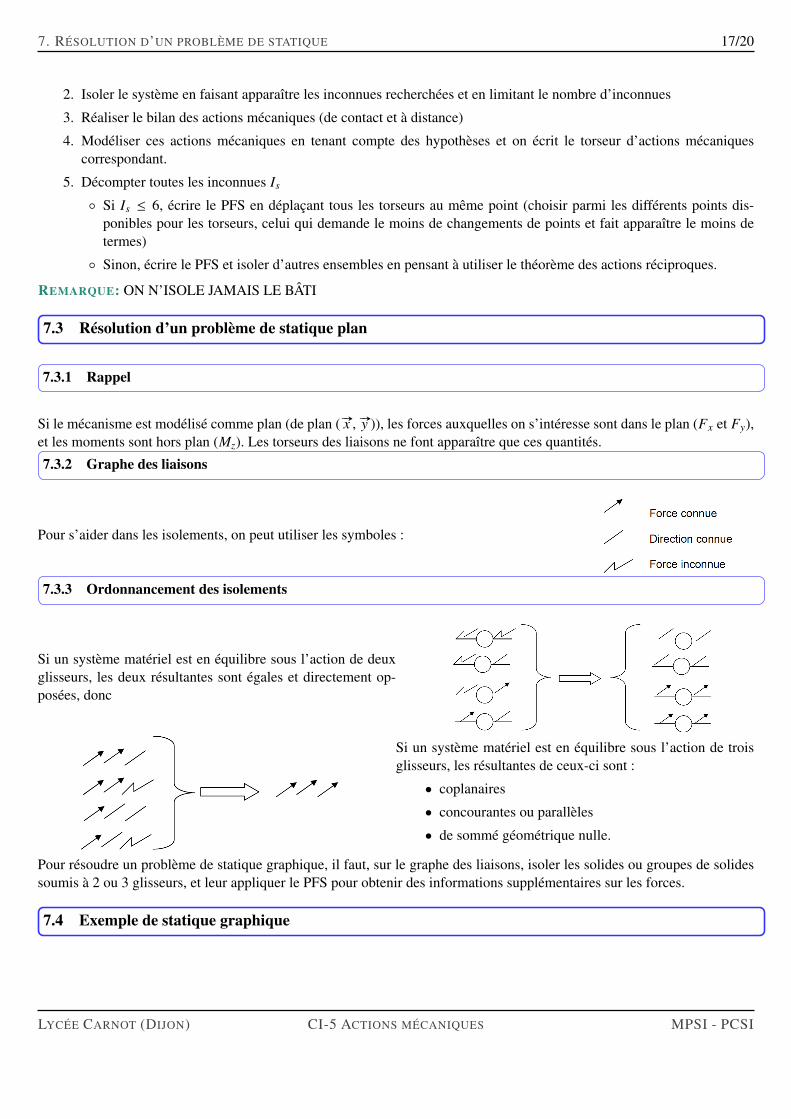
2. Isoler le système en faisant apparaître les inconnues recherchées et en limitant le nombre d’inconnues
3. Réaliser le bilan des actions mécaniques (de contact et à distance)
4. Modéliser ces actions mécaniques en tenant compte des hypothèses et on écrit le torseur d’actions mécaniquescorrespondant.
5. Décompter toutes les inconnues Is
Si Is ≤ 6, écrire le PFS en déplaçant tous les torseurs au même point (choisir parmi les différents points dis-ponibles pour les torseurs, celui qui demande le moins de changements de points et fait apparaître le moins determes)
Sinon, écrire le PFS et isoler d’autres ensembles en pensant à utiliser le théorème des actions réciproques.
REMARQUE: ON N’ISOLE JAMAIS LE BÂTI
7.3 Résolution d’un problème de statique plan
7.3.1 Rappel
Si le mécanisme est modélisé comme plan (de plan ( #»x , #»y )), les forces auxquelles on s’intéresse sont dans le plan (Fx et Fy),et les moments sont hors plan (Mz). Les torseurs des liaisons ne font apparaître que ces quantités.
7.3.2 Graphe des liaisons
Pour s’aider dans les isolements, on peut utiliser les symboles :
7.3.3 Ordonnancement des isolements
Si un système matériel est en équilibre sous l’action de deuxglisseurs, les deux résultantes sont égales et directement op-posées, donc
Si un système matériel est en équilibre sous l’action de troisglisseurs, les résultantes de ceux-ci sont :
• coplanaires
• concourantes ou parallèles
• de sommé géométrique nulle.
Pour résoudre un problème de statique graphique, il faut, sur le graphe des liaisons, isoler les solides ou groupes de solidessoumis à 2 ou 3 glisseurs, et leur appliquer le PFS pour obtenir des informations supplémentaires sur les forces.
7.4 Exemple de statique graphique
LYCÉE CARNOT (DIJON) CI-5 ACTIONS MÉCANIQUES MPSI - PCSI
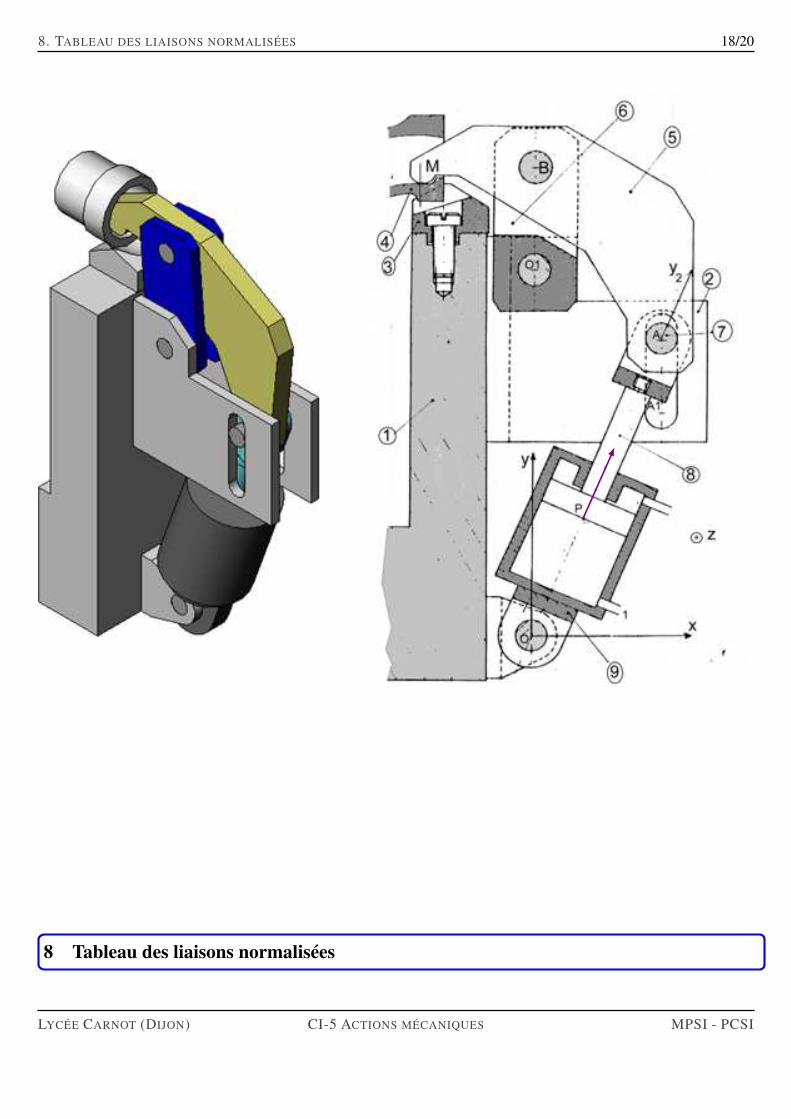
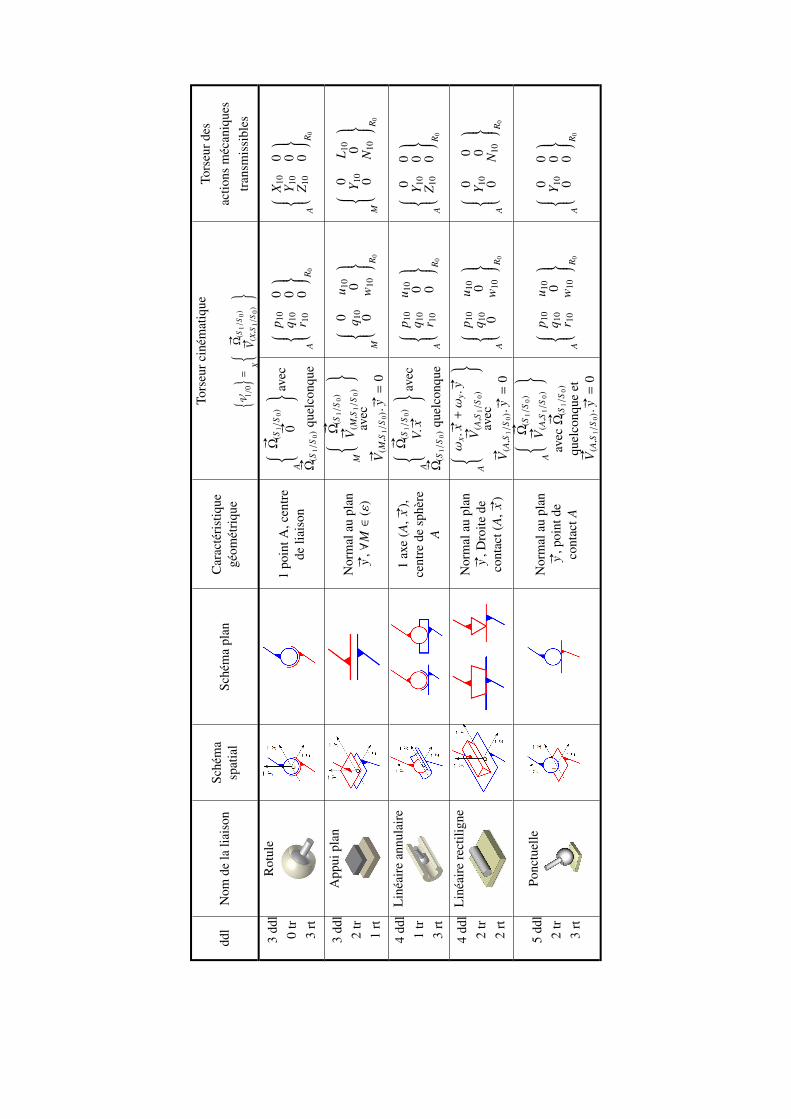
8. TABLEAU DES LIAISONS NORMALISÉES 18/20
8 Tableau des liaisons normalisées
LYCÉE CARNOT (DIJON) CI-5 ACTIONS MÉCANIQUES MPSI - PCSI
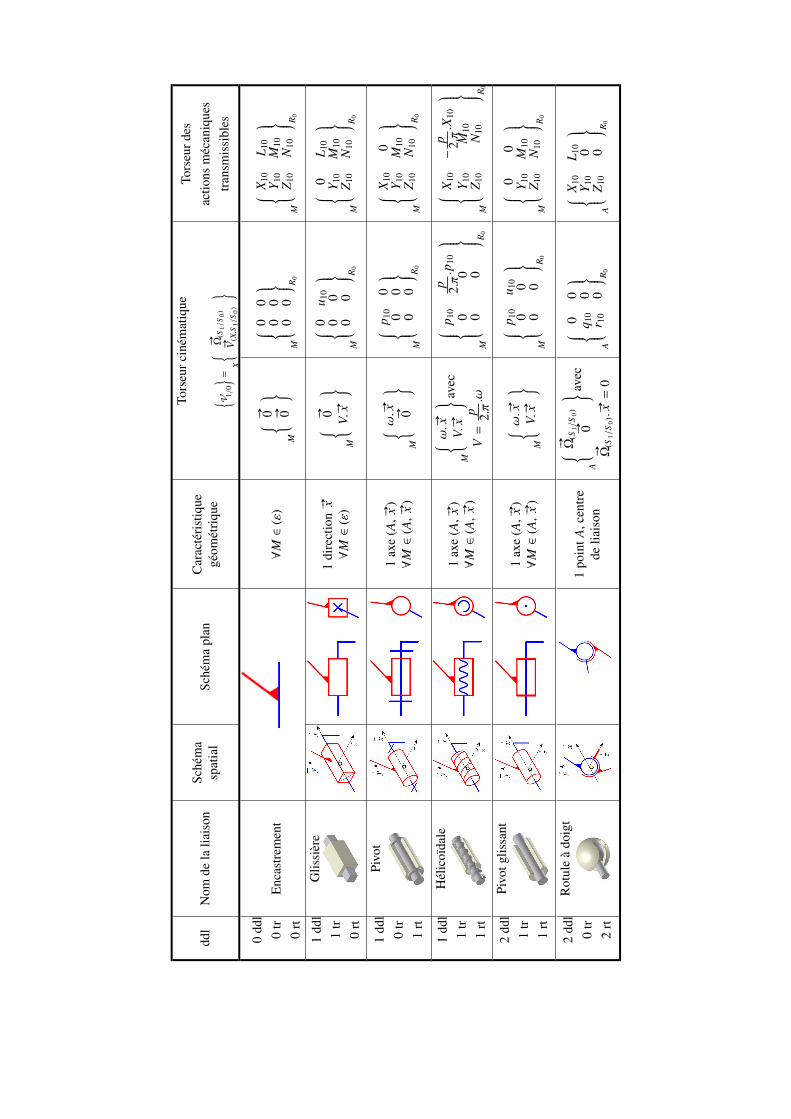
ddl
Nom
dela
liais
onSc
hém
asp
atia
lSc
hém
apl
anC
arac
téri
stiq
uegé
omét
riqu
e
Tors
eurc
iném
atiq
ue
V 1/0 =
X
#» Ω(S
1/S
0)#» V
(X,S
1/S
0)
To
rseu
rdes
actio
nsm
écan
ique
str
ansm
issi
bles
0dd
l0
tr0
rtE
ncas
trem
ent
∀M∈
(ε)
M
#» 0 #» 0
M
00
00
00
R0
M
X10
L 10
Y 10
M10
Z 10
N10
R0
1dd
l1
tr0
rt
Glis
sièr
e1
dire
ctio
n#» x
∀M∈
(ε)
M
#» 0 V.#» x
M
0u 1
00
00
0
R0
M
0L 1
0Y 1
0M
10Z 1
0N
10
R0
1dd
l0
tr1
rt
Pivo
t1
axe
(A,
#» x)
∀M∈
(A,
#» x)
M
ω.#» x
#» 0
M
p 10
00
00
0
R0
M
X10
0Y 1
0M
10Z 1
0N
10
R0
1dd
l1
tr1
rt
Hél
icoï
dale
1ax
e(A,
#» x)
∀M∈
(A,
#» x)
M
ω.#» x
V.#» x
avec
V=
p 2.π.ω
M
p 10
p 2.π.p
100
00
0
R0
M
X10−
p 2.π.X
10Y 1
0M
10Z 1
0N
10
R0
2dd
l1
tr1
rt
Pivo
tglis
sant
1ax
e(A,
#» x)
∀M∈
(A,
#» x)
M
ω.#» x
V.#» x
M
p 10
u 10
00
00
R0
M
00
Y 10
M10
Z 10
N10
R0
2dd
l0
tr2
rt
Rot
ule
àdo
igt
1po
intA
,cen
tre
delia
ison
A
#» Ω(S
1/S
0)#» 0
avec
#» Ω(S
1/S
0).#» x
=0
A
00
q 10
0r 1
00
R0
A
X10
L 10
Y 10
0Z 1
00
R0
ddl
Nom
dela
liais
onSc
hém
asp
atia
lSc
hém
apl
anC
arac
téri
stiq
uegé
omét
riqu
e
Tors
eurc
iném
atiq
ue
V 1/0 =
X
#» Ω(S
1/S
0)#» V
(X,S
1/S
0)
To
rseu
rdes
actio
nsm
écan
ique
str
ansm
issi
bles
3dd
l0
tr3
rt
Rot
ule
1po
intA
,cen
tre
delia
ison
A
#» Ω(S
1/S
0)#» 0
avec
#» Ω(S
1/S
0)qu
elco
nque
A
p 10
0q 1
00
r 10
0
R0
A
X10
0Y 1
00
Z 10
0
R0
3dd
l2
tr1
rt
App
uipl
anN
orm
alau
plan
#» y,∀
M∈
(ε)
M
#» Ω(S
1/S
0)#» V
(M,S
1/S
0)
av
ec#» V
(M,S
1/S
0).#» y
=0
M
0u 1
0q 1
00
0w
10
R0
M
0L 1
0Y 1
00
0N
10
R0
4dd
l1
tr3
rt
Lin
éair
ean
nula
ire
1ax
e(A,
#» x),
cent
rede
sphè
reA
A
#» Ω(S
1/S
0)V.
#» x
avec
#» Ω(S
1/S
0)qu
elco
nque
A
p 10
u 10
q 10
0r 1
00
R0
A
00
Y 10
0Z 1
00
R0
4dd
l2
tr2
rt
Lin
éair
ere
ctili
gne
Nor
mal
aupl
an#» y
,Dro
itede
cont
act(
A,
#» x)
A
ω x.#» x
+ω
y.#» y
#» V(A,S
1/S
0)
av
ec#» V
(A,S
1/S
0).#» y
=0
A
p 10
u 10
q 10
00
w10
R0
A
00
Y 10
00
N10
R0
5dd
l2
tr3
rt
Ponc
tuel
leN
orm
alau
plan
#» y,p
oint
deco
ntac
tA
A
#» Ω(S
1/S
0)#» V
(A,S
1/S
0)
av
ec#» Ω
(S1/
S0)
quel
conq
ueet
#» V(A,S
1/S
0).#» y
=0
A
p 10
u 10
q 10
0r 1
0w
10
R0
A
00
Y 10
00
0
R0