Embed Size (px)
Citation preview

Commande scalaire d’une machine asynchronecontrôlée en courant
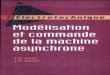
On considère une machine asynchrone triphasée tétrapolaire (p = 2). Son modèle par phase, enrégime permanent sinusoïdal, a été identifié ; il est donné à la figure 1 dans l’hypothèse de lalocalisation des fuites magnétiques au stator et de pertes ferromagnétiques négligeables.
V
I R
R'/'/g
I
I
jN ωωωω
jL' ωωωω ΕΕΕΕs
s sq
d
rs s
ss
Figure 1 Modèle par phase, à fuites localisées au stator.
ωs est la pulsation des tensions statoriques ;
ωr est la pulsation des courants rotoriques ;g s r= ω ω/ est le glissement.
On donne : R N Ls s s= = =16 200 8m H, mH, R' = 11 mΩ Ω, 'µ ,
valeurs nominales (indice n) :ω π ω πsn rn snrad s rad s I= = =100 2 5 883/ , , / , A .
1-. Fonctionnement nominal
1.1 Établir l’expression complexe de V s en fonction de I s et des éléments du modèle ; en
déduire la valeur efficace Vsn .1.2 Déterminer les expressions de I Id q, en fonction de I s et des éléments du modèle ; en
déduire les valeurs efficaces I Idn qn, .
1.3 Exprimer la puissance transmise PT du stator au rotor en fonction de Iq puis de Is ; en
déduire l’expression du couple électromagnétique ce en fonction de Is et ωr . Calculer lavaleur nominale du couple. Pour quelle valeur ωrM de ωr , le couple est-il maximal (à Is
constant) ? Quelle est l’expression du couple maximal CeM en fonction de Is ?
2-. On considère la commande scalaire de la machine (mode électromécanique dominant) danslaquelle ωr est constamment égale à ωrM , de sorte que la seule grandeur influente du couple est lecourant Is .
2.1 Déterminer la relation entre Vs et Is , à ω ωr rM= .2.2 Établir le Graphe Informationnel Causal sur la machine accouplée à un système mécanique,
la grandeur influente d’entrée étant Is .2.3 Indiquer, sous la forme d’un graphe, comment est effectué le réglage de l’onduleur de tension
(Vs s, ω ) à partir de la connaissance de ωrM , Ω (la vitesse angulaire) et I Is sREG= .2.4 Proposer, après justification, le graphe de la commande.

Corrigé succinct
1. Fonctionnement nominal
1.1 V I R jNR g jL
R g jLs s s s ss s
s s= + +
+
ωωω
( '/ ) '
( '/ ) ' ; g s rω ω=
( ) ( )V I
R R L N L R R
R LI Vs s
s s s s r s s s r
s rs sn=
− + ++
= ⇒ =' ' ' '
' ', V
ω ω ω ωω
2 2 2
2 2 2 0 453 400
1.2 Division de courant :
I IR
R jLI I
jL
R jLI Id s
s rq s
s r
s rdn qn=
+=
+⇒ = =
'
' ',
'
' 'A, A
ωω
ω152 870
1.3 P R g IR L
R LI C pT q
s
r
s r
s rs e s= =
+=3 32
2 2
2 2 22( '/ )
' '
' '( / )
ωω
ωω
ω , C pR L
R LIe
s r
s rs=
+3
2
2 2 22' '
' 'ωω
⇒ =Cen 6360 Nm ; ωrM sR L= ='/ ' , rad/ s1 375 , C L IeM s s= 3 2'
2. Commande scalaire [J.P. Caron, J.P. Hautier . Systèmes électrotechniques - Applicationsindustrielles - Problèmes et solutions. Problème 7. Editions Technip, Paris 2000], [J.P. Caron,J.P. Hautier. Modélisation et commande de la machine asynchrone. Editions Technip, Paris1995]
2.1 ( )V R jN jL I V R N L Is s s s s s s s s s s s s= + + ⇒ = + +ω ω ω' / ( ) ( ' /2)2 2 2 2 ,
2.2 Dans l’hypothèse du mode électromécanique dominant, l’expression de Ce est celle durégime harmonique permanent :
R '1 3 2→ =C L Ie s s
( )R 21
→ = −d
dt JC Ce s
Ω, avec J le moment d’inertie total ramené au rotor, Cs le
couple de charge : R loi ( )3 → Cs ΩGraphe informationnel causal sur le processus :
R1 R2
R3
IC
C
ΩΩΩΩs
s
e
2.3 ωs est donné par la relation rigide R4 d’autopilotage fréquentiel :R 4 → = +ω ωs rM pΩ
et Vs par :
R ( ' /2)5 2 2 2→ = + +V R N L Is s s s s sREGω , (note : REG désigne une grandeur deréglage)• Graphe informationnel causal sur le réglage de la fréquence et de la tension de sortie de
l’onduleur
R4 R5
I
ΩΩΩΩ s
ωωωωωωωω Vs
rM
sREG
p

2.4 Graphe de commande de la vitesse
• Inversion indirecte de la relation R2 :
RC ( )~
2 2→ = − +C C CeREG REF sΩ Ωavec : ΩREF , la référence de vitesse,
Ω , la vitesse captée,~Cs , le couple de charge estimé,C2 , l’algorithme de réglage (correcteur de vitesse)
• Inversion directe de la relation R1RC / '1 3→ =I C LsREG eREG s
• Graphe informationnel causal sur la commande scalaire contrôlée en courant :
I C
C
ΩΩΩΩΩΩΩΩ
RC1 RC2sREG eREG
s
REF
Fin du corrigé