Embed Size (px)
Citation preview

CORR]~LALEUR OPTI~UE POUR LA DI~TECTION, EN TEMPS RI~EL, DE LA PR]~SENCE DANS UN BRUIT D'UN SIGNAL DI~PENDANT
DE DEUX PARAM]~TRES INCONNUS
p a r
Jean-Pierre LUSINCHI *
SOMbiAIBE.- On ddcrit un ensemble permettant par des moyens optiques la ddtection en temps rdel, lorsque l'on conna~t S(t), de la prgsence dans un bruit d'un signal Sin(t-- to) ] d@endant des deux param~tres inconnus n et t 0. On discute l'influence de la polarisation des signaux sur los per[ormances du corre'lateur. Cette considdration est rendue ngcessairc par le fait qu'il n'existe pas d'amplitude lumineuse ndgati~e en optique non-cohdrente.
PLA~. - - �9 J. Cadre de l 'dtude. �9 2. Dese~qption d u dtspositi[. 2.i) Description de la mgmoire; 2.2)Calcul du produit F(E). S[n(t --'r)]. �9 3. Calcul de l'intdg~'ale I. �9 4. Presenta t ion des rdsttltats. �9 5. Considd- ~'at~rts analyt iques. 5.1) Gain en rapport signal sur bruit ; 5.2) Rgsolution. �9 Conclusion. �9 Bibllo-
graphic (3 rdf.).
I . C A D R E D E L ' ~ T U D E ,
Le probl~me de la d6tection par corr61ation en temps r6el a d6jh fait l 'objet de nombreuses 6tudes ayant abouti h des rdalisations que l'on pout classer en deux ensembles.
1.1. Le signal est monodimensionnel, c'est-h- dire qu'il no d~pend que d'un soul param~tre inconnu. Ce param~tre est g6n6ralement le retard du signal.
Los appareils concernant ce cas font appel h une technologic 61ectronique lorsque la dur6e du signal n'est pas trop grande (quelques millisecondos), et une technologic optiquo lorsque la dur6o du signal devient de l'ordre du dizibme de seconde, en raison de la difficult6 qu'il y a h mettre en m6moire un signal de cette dur6e par des moyens purement 61ectroniques [i].
1.2. Le signal est bidimensionnel, c'est-~-dire qu'il d6pend de deux param~tres inconnus.
Ce probl~me pr6sente un int6rgt tout particulier en traitement du signal lorsque le signal est de la forme Sin( t - - to)] , dons lequel los param~tres inconnus sent n e t t o (d6tection d'un signal affect6e d'un retard inconnu et d'un effet DSppler inconnu).
Los dispositifs r6alis6s jusqu'~ pr6sent concernent los cos particuliers suivants :
1.2.1. La variation de n e s t de l'ordre de 1 pour l06 ~ i pour i0 a en valour relative. T e s t de l'ordre de la milliseconde et t o appartient h u n intervalle fmi [2]. Ceei est le probl~me de la d6tection radar dans une cortaine gamme de distance.
1.2.2. La variation de n e s t de l'ordre de quel- ques % en valour relative, T e s t de l'ordro de la seeonde, t o est quelconque. C'est le probl~me de la d6tection sonar. Les solutions d6jh propos6es se limitent h u n petit nombre de mod61es qui rendent compte de quelques valeurs de n, ce qui ram~ne le probl~me h la raise en parall~le de plusieurs dispo- sitifs tels que ceux 6voqu6s en I.l.
Nous nous proposons ici de d6tecter des signaux Sin(t-- to)] , de duroc T in , tels que :
- - T est de l'ordre du dizi~me de seconde h quelques secondes,
- - t o est quelconque, - - n varie de quelques pour cent en valour rela-
tive, le calcul 6tant fait pour plusieurs dizaines de valeurs de n.
Appelons F(t) la fonction repr6sentant le bruit dans lequel nous voulons d6tecter la pr6sence 6ven- tuelle de signal par estimation de la fonction d'inter- corr61ation entre F(t) et le signal de r6f6rence. La fonetion h calculer s'6crit
F(n, x) = / ' ~ + T I n F(t).S[n(t-- z)] dr.
Ceci devient, ]orsqu'fi un instant to, et pendant une dur6o T [ n F(t) s'identifie h S [ n ( t - to)].
f,.+r/- S[n(t- to)] .S[n( t - -~)] dt. C(n, z, to)= s t.
II. DESCRIPTION DU D I S P O S I T I F [3].
Le calcul de F(n, v) n~cessite los op6rations sui- vantes :
1 ~ raise en m~moire des fonctions S(nt) ;
* Centre d ']~tude des Ph6nom~nes Al6atolres (CEPHAG), {associ6 au C. N. R. S.), Facult6 des sciences, 46, avenue F61ix-Viallet. 38 - - Grenoble.
174
t . 23, n ~ 5-6, 1968]
20 caleul du produit F(t). S[n(t - - x)] pour chaque valeur de n e t de t ;
/ ~ + ~ l n 3 ~ calcu] de l'int6grale F(t). S [n( t - - ~) dt,
40 pr6sentation du r6sultat.
IIA. Description de la m6moire.
La m6moire doit ~tre ~ deux dimensions pour permettre la restitution de S(nt) soit h n variable et t constant, soit h n constant et t variable�9 De plus, elle dolt pouvoir contenir des fonctions du temps dont la durde s'dtend de quelques dizi~mes de secondes h quelques secondes.
On salt que la solution purement 61ectronique du probl~me est impraticable, du fair de sa complexit6.
C'est pourquoi la solution propos6e ici utilise un enregistrement optique de S(nt). Cet enregistrement est simplifi6 par le fait que l'on conserve en sortie une information strictement proportionnelle h la fonction de corr61ation cherch6e, en subst i tuant S(nt) la fonction d6duite de celle-ci par 6cr6tage infini [4].
De cette mani~re l ' enreg is t rement optique de S(nt) en transparence variable se r6duit h l'inscrip- tion sur le support de zones opaques ou parfaite- ment transparentes, h condition d 'ajouter h cette fonction une composante continue qui la rende toujours posture.
Cette fa~on de proc6der appelle certaines remar- ques que nous d6velopperons au paragraphe 5.
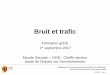
Si nous consid@ons une fonction S(nt) corres- pondant h une valeur particuli~re de n enregistr6e suivant une des deux dimensions g6oin6triques du support, toutes les fonctions S(nt) correspondant h toutes les valeurs de n s e ddduiront de la premiere par homothgtie (Fig. 1). De cette mani~re, en se
i
/ ~ss% j
FIG. 1. - - I n s c r i p t i o n d ' u n e m 6 m o i r e ,
ddplagant suivant deux directions perpendiculaires sur le support, on observera soit la variation de
C O R R ~ L A T E U R O P T I Q U E P O U R L A D I ~ T E C T I O N 2 / 7
S(nt) h t constant et n variable, soit h n constant et t variable.
Le support proprement dit est un cylindre de plexig]ass entrMn6 par un servo-syst~me assurant une vitcsse de rotat ion dont la stabilit6 est fonction de la variation de n dont il faut tenir compte. Un observateur fixe, situ6 en A (Fig. 2) observera la variation de S(n0t), n o 6tant d6termin6 par l 'ordon- n6e y de A dans le rep~re x, y, z.
Une variation AV de la vitesse V o de support entralnera une variation apparente An de n pour l 'observateur en A telle que
An &V - - = - -
n 0 V 0
I1 importe doric, si l 'on veut diff6rencier deux fonctions S(n 0 t) et S[(n o -~ ~n) t] que l 'on ait
~Yt AV < Vo - - '
n o
1
Fie . 2. - - R e p 6 r a g e d ' u n e v a l e u r par t icu l i~re de S(nt).
Dans le cas pr6sent, pour une variation relative totale de n de 1 % , il faut, si l 'on veut distinguer une eentaine de fonctions S(nt), ClUe
AV T < t0-~. t0 -3,
donc
AV V < 10-4"
- - 175 - -
3/7 J . - ] P . L U S I N C H I [ANNALES DES T]~LI~COMMUNICATIONS
Supposons maintcnant que F(t) soit tello quo :
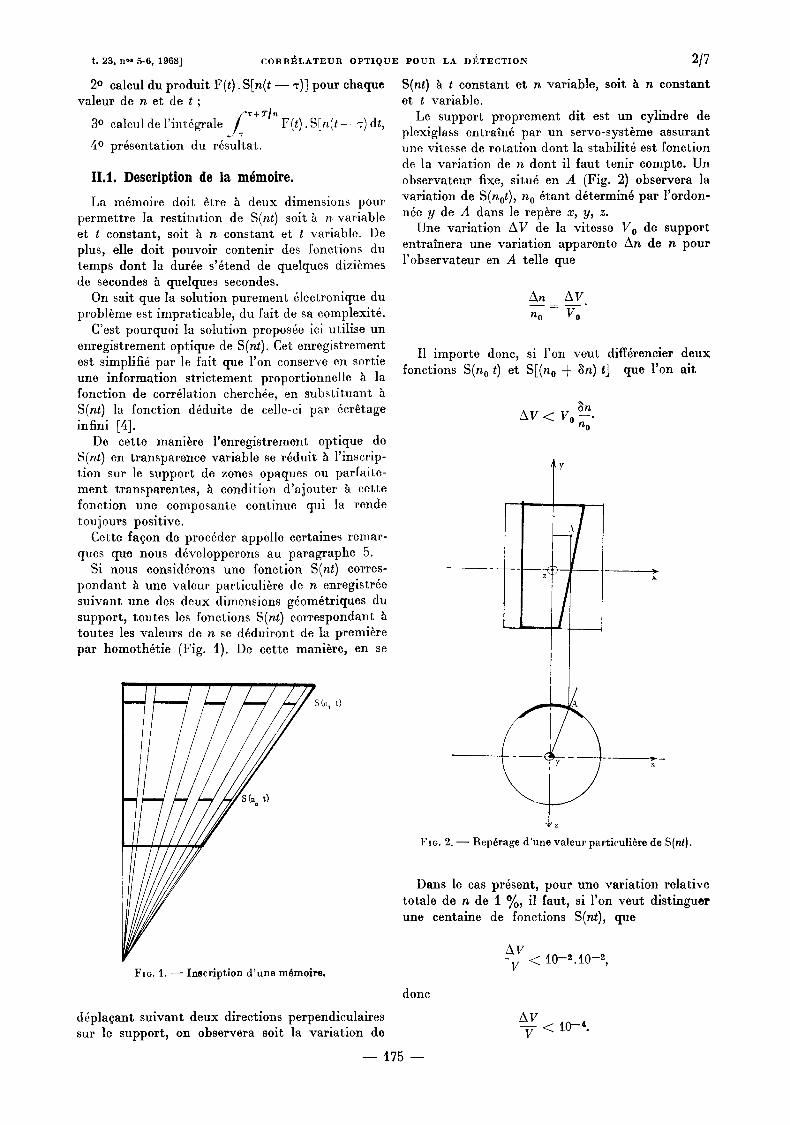
II . 2 . Ca leu l du p r o d u i t F(t).S[n(t--,r)]. Consid6rons un certain nombre de m6moires
analogues h celles ddcrites au paragrapho II . l , (Fig. 1), identiques et disposdes los unes h la suite des autres sur lo cylindre, la circonfdrence du cylindre 6rant prise 6gale h u n hombre entier de lois le plus grand c6t6 d 'une m6moire (Fig. 3).
Un pinceau de lumi6ro dent l 'dtendue suivant l'axo des t e s t dgale h T i n 1 (n~ dtant ]a plus petite valour pouvant 6tre prise par n) et l 'dtendue suivant l 'axe des n e s t dgale h cello d 'une des m6moiros, 6claire en permanence le cylindre. L'intensit6 du pinceau est h chaque instant fondue proportion- nolle h F(t) par modulation (Fig. 3).
Considdrons alors dans un plan d'ordonnde Yo, correspondant h l 'inscription sur le cylindre des fonctions S(not), un point recevant un rayon lumi- neux apr6s traversde du cylindro (Fig. 4). A Fins- rant t o consid6rd, l ' intensit6 du rayon lumineux est proportionnelle h F(t0).S(not0). Au mgmo ins- tant , on un autre point distant du premier, do la longueur curviligno l, l 'intonsitd du rayon lumineux est F(to).S[n o (t o - - l /V] .
pour t < to, (A) pour t 0~<t~< t o+ T,
pour t > t o+ T,
K 6tant un rdel positif.
F(t) quelconque, F(t) = KS[n 0 ( t -- to)], F(t) quelconque ;
L'origine des temps est prise h l ' instant off lo ddbut de l 'une des deux mdmoires 6clairdes h Fins- tant t o est passde devant un rep~re fixe (Fig. 5).
Darts cos conditions, l ' intensitd du pinceau lumi-
Vt,
[ 1 = F(t.)S [no (to+l)]
,)s(~ t . )
I = F(to).S In o (to +~- -a~)]
Fro. 5. - - Calcul du produit F(t).':[n(t - - ~)].
engine
M~moire
Zone opaque
f F,c. 3 . - ]~clairement du cylindre support.
(0 / l =F(t) s ~ t)
FIG. 4. Modulation du pinceau lumineux par travors6e du eylindro.
neux apr6s travers6e du cylindro est ddcrite par los relations, h l ' instant to, et on nous ddpla~ant darts le sons contraire du ddfilement des m6moires :
I = F(to).S[n o (t o - "r)],
variant continfiment de
sauf pour . . . .
T l - - l n I V V
T T
n 1 n o > ~ > 0 off n o u s a v i o n s I = 0.
Plagons-nous h ~ donn6, c'est-h-diro en un point d'abscisse fix6e par rapport au rep~re origine. Entre l ' instant t o et I ' instant t o -4 -T lno , ce point enregistrera une quantitd de lumi~re proportion- nolle h
F . + ~/m I = S[n o ( t - to) ] . S[n o ( t - - 1:)] dr, J to
Cette fonetion de corrdlation sera maximale pour 1: = to, c'est-h-dire lorsque le retard "r du signal de rdfdrence mis en m~moire sera dgal au retard t o du s ignal h ddtecter.
Nous voyons que cette d6toction est toujours possible, quelle que soit la valour de t o ; en effet, il suffit pour cola que ~ puisso prendro n' importo quelle valour entre 0 et + 0% autrement dit, que le pinceau lumineux modul6 par F(t) 6claire toujours une portion de cylindre oh so trouve enregistrd S[n o (pT)], p dtant un nombro entier positif et tel que p T < t o < ( p + i ) T , co qui est r6alisd avec lo syst~me d6crit ici (voir figure 5).
- - i 7 6 - -
t . 23, n os 5-6, 1 9 6 8 ] CORRI~.LATEUR O P T I Q U E POUR LA DI~.TECTION 4/7
I I I . C A L C U L D E L ' I N T ~ G R A L E .
j f TI"~ Sin 0 (t-- to) ] .Sin o (t--"~)] dt.
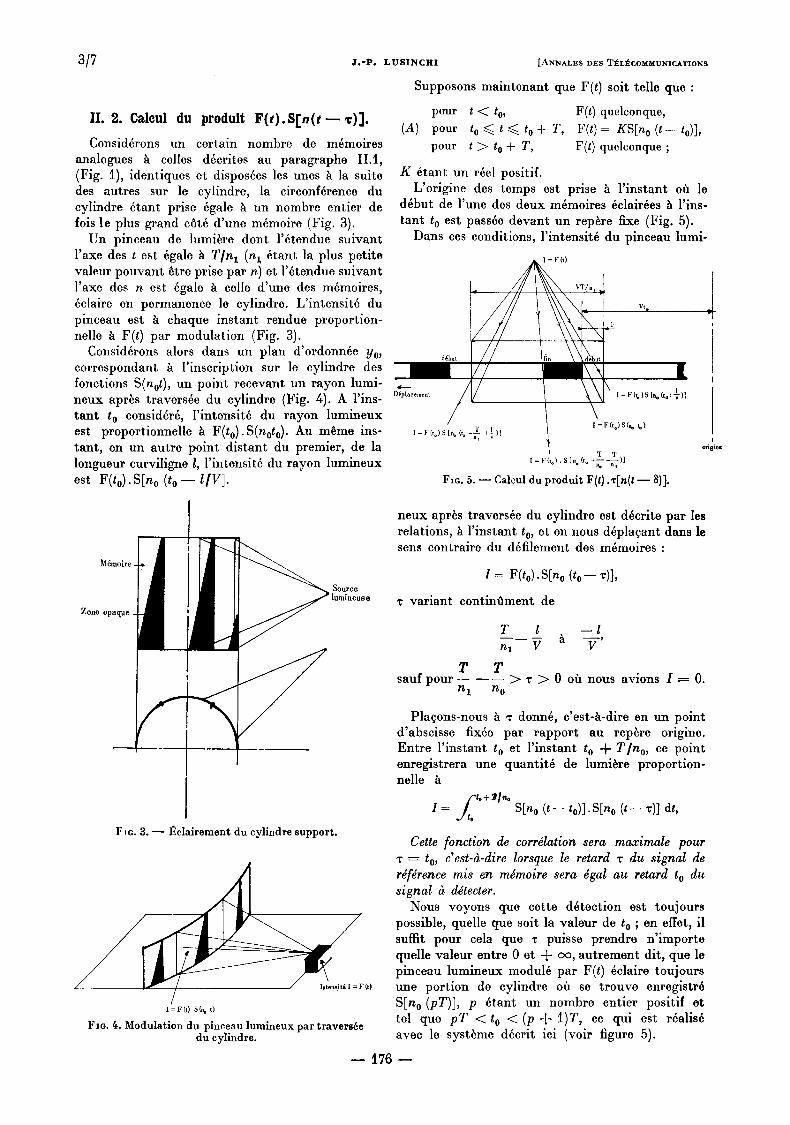
On forme l'image de la portion du cylindre 6clairge par transparence par le pinceau modul6 sur la face sensible d'un tube analyseur h photoconduction (Vidicon).
Pendant un temps t, les charges qui apparaissent en un point off l'6clairement est une function du temps E(t) sent proportionnelles h
. s E(t) dr.
Le faisceau d'61ectrons explorateur, en ramenant le potentiel de ce point h celui de la cathode, fera apparaltre aux bornes de la r6sistance de charge Re une tension proportionnelle
A E(t) (Fig. 6). dt.
On poss~de donc le moyen de calculer l'int6grale consid6r6e, h condition que le faisceau explorateur ne ram~ne le potentiel de la face sensible h celui de la cathode qu'au bout d'un temps T[n o apr~s l'instant t 0. Or, darts la pratique on cherche pr6ci- s6ment si F(t) s'identifie h u n instant donn6, to,
S(nt) et on ne peut donc d6clencher la lecture h
E (t)
I(- Cible
p - -
CathodQ
FIa. 6. - - Fonc t ionnement du tube analyseur.
I'instant (T[no) ~ to, puisque l'on ne connalt pas t 0. 11 y a doric lieu de proc6der de la mani~re d6crite ci-dessous.
Le faisceau explorateur est astreint h suivre la fin des m6moires port6es sur le cylindre (Fig. 7). De cette fa~on, tous les points de la couche photo- conductrice int~grent pendant au moins une dur6e T]no. Si h nn instant t o les conditions (A) sent r6a- lis6es, le faisceau explorateur lira la function de corr61ation entre l'instant t o -b T[no e t t o -t- 2 Tin o. Le pic de corr61ation apparaltra par consgquent h l'instant to -~ T[no et nous aurons bien une corr61a- tion en temps r6el.
En pratique, n e s t bien entendu une inconnue. I1
_ •
D~placement /
l~ ~placement du spot
Cible
i 11r m
Cathode
Fro. 7. - - Accroissement du faisceau explorateur.
faut donc disposer non pas d'une trace ponctuelle du faisceau sur la cible, mais d'une trace lin6aire, de fa~on h lire au meme moment, pour z donn6, routes les functions C(n, ~, to) pour n variable. L'apparition 6ventuelle du pic de corr61ation donnera doric en m~me temps t o et n 0.
Plut6t que de former un faisceau explorateur plan, il revient au mgme de balayer rapidement la cible. Donc, en fait, le balayage suivant l'axe des t ne pourra ~tre continu (Fig. 8) et cela introduit donc une limitation darts le nombre de points off l'on peut distinguer un pic de corr61ation. Mais il est toujours possible de rendre cette limite moins resLric- t ire que celle apport6e par la structure granulaire
l~:t,l~,ce.~,,bt sL, i,,mt t
IVV I FIG. 8. - - Balayage de la eible du tube analyseur.
de la cible qui limite le hombre de points h environ I 000.
On voit ainsi que la p6riode de balayage doit pour cette m6thode gtre la m6me pour toutes les functions S(nt), et qu'il faut la prendre au moins 6gale h T[nl, n 16tant, rappelons-le, la borne inf6rieure des n. Ceci entralne que pour routes les functions autres que S(n 1 t) le faisceau explorateur sera non pas asservi h suivre la fin des m6moires, mais pr6c~dera d'une quantit6 tr~s petite le d6but des m6moires, la structure de celles-ci 6tant rendue p6riodique, ainsi que nous l'avons vu au paragra- phe II.
La cons6Tlence est que le pic de corr61ation sera lu, s'il existe, non pas au temps t o ~ T[no, mais au temps t o ~ T in 1.
Ce n'est donc pas en toute rigueur une corr61a- tion en temps r6el reals, comme ( n - - n o ) I n o n'exc~de pas i ~/o pas hypoth~se, le retard h la
d6tection T nl est tout h fait n6gligeable.
- - 1 7 7 - -
+ a
J . - P . , L U S I N C H I [ A N N A L E S DES T]~LI~COMMUNICA.TIONS
IV. P B ~ S E N T A T I O N D E S R I ~ . S U L T A T S .
Los informations h pr6senter on sortie s e n t : t) y a-t-il pr6sence de signal ? et dans l'aflir-
mative : 2) valour do no, 3) valour de t 0. Le signal pr61ev6 sur la r6sistance de charge R,
modulo l 'intensit6 du faisceau d'inscription d 'un tube ~ rayons cathodiques classique. De plus ce faisceau balaye la face avant du tube h rayons cathodiques en synchronisme avec le faisceau explo- rateur de la cible de vidicon. Done, un maximum de
s(t)
- a
t r
FIG. 10. - - Fonction binaire S(t) non polaris6e.
I ...
F•
5/7
I =F(t)
Int6grateur
FIG. 9. - - Sch6ma synoptiquc.
charges en un point de la cible, caract6risant la pr6sence d 'un signal de param~tres (no, to) so tra- duira par un maximum d'6clairement au point correspondant du tube h rayon cathodique. Ce dernier pourra done gtre rep6r6 dans un syst~me d'axes directement gradu6s en n e t t. En fait, la p6riodicit6 des m6moires introduit naturel lement une ambigu~t6 modulo T/nx sur l 'axe des t. Cette ambigu~t6 est ais6ment lev6e en comptant le nombre de m6moires ayant d6fi16 devant un repute donn6 h l ' instant off on lit un pic de corr61ation.
Le sch6ma synoptique de l 'ensemble est donn6 sur]la figure 9.
V. CONSID~.BATIONS ANALYTIQUES.
Dans cette partie nous allons examiner 1'influence de la technologic optic[ue sur los performances du corr6lateur en ce qui concerne le gain en rapport signal sur bruit et la rdsolution.
V.1. Gain en rapport s igna l sur bruit.
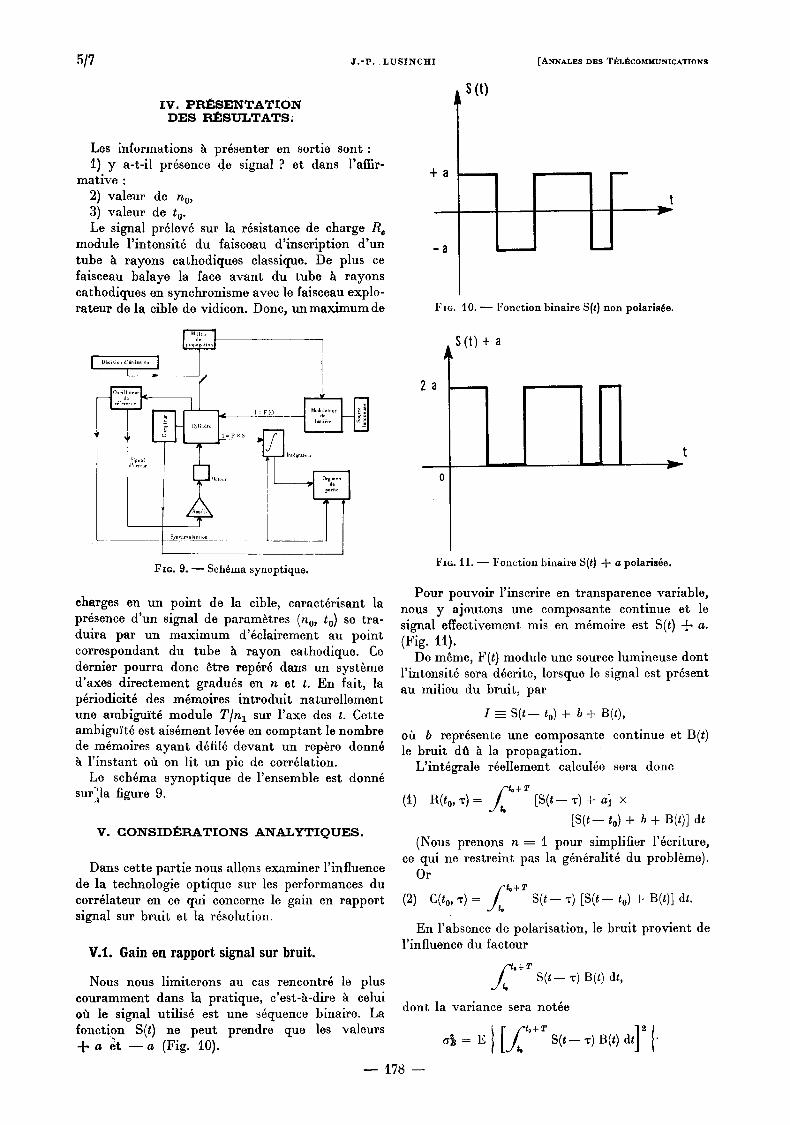
Nous nous limiterons au cas rencontr6 le plus eouramment dans la pratique, c'est-h-dire h celui off le signal utilis6 est une s6quence binaire. La fonction S(t) ne pout prendre que los valeurs -{-a et - - a (Fig. 10).
S (t) + a
2 a
t y
Fro, 11. - - Foaction binaire S(t) + a polaris6e.
Pour pouvoir l'inscrire en transparence variable, nous y ajoutons une composante continue eL le signal effectivement mis en m~moire est S(t) -~ a. (Fig. l i ) .
De mgme, F(t) module une source lumineuse dent l 'intensit6 sera d6crite, lorsque le signal est present au milieu du bruit, par
I---- S(t--t0) + b + B(t),
off b repr6sente une eomposante continue et B(t) le bruit dfi h la propagation.
L'int6grale r6ellement calcul6e sera done
(1) R(t 0, x) = f t o + r [S(t-- 1:) + a] • j r ,
[S(t-- to) + b + B(t)] dt
(Nous prenons n---- i pour simplifier l'6criture, ce qui ne restreint pas la g6n6ralit6 du probl~me).
Or
(2) C(t0, "r = --/-t,+T S(t-- z) [S(t-- to) + B(t)] dt. J to
En l'absence de polarisation, le bruit provient de l'influence du facteur
,t, '+T S(t-- v) B(t) dt,
dent la variance sera not6e
(~ = E l [/t~ S(t--.~) B(t) dt]2 1"
- - 178 - -

t 23 , n o~ 5 -6 , 1968] C O R R E L A T E U R O P T I Q U ' E
En pr6sence de polarisation, nous avons :
t/(t o, x) = f t , + T [S(t-- "r) + a] [S( t - - to) + B(t)] dt + J ~
gtl, + T /'to + T ab at + b ~ t , S(t-- ~) dr.
Le bruit provient maintenant des facteurs
/ T ~to+ I' __to. IS(t--'r)§ u]B(t) dt+ bS(t--v) dt+ �9 / ' t,
f dt § f t , + T a t t~ T S(t-- t0) ab dT. J t, J t,
Le dernier terme s'61imine als6ment par filtragr le troisi~me est nul par hypoth~se. Examinons les deux autres.
La variance de
oto t~ IS(t-- v) § a] B(t) dt,
s'6crit
z~ = E iS( t - - r ) + a] B(/) at �9 iJ t,
Si nous remarfluons flue
S 2 ( t - - ~) - a ~,
alors,
~] t~a 2E{B 2(t)}, ct a ~ _ = 2 a 2 E t B2(t) }.
Donc
z} = 2 z $ .
Autrement dit, changer S ( t - v) en S ( t - T)-~ a a pour effet de diminuer le gain en rapport signal sur bruit de 3 dB.
L'influence du terme de polarisation best t raduite par le terme
b f t , + z S(t-- v) dr, g t o
flui varie avee t o et z. La valour de ce terme est 6gale, h u n facteur
multiplicatif pros, h la diff6rence entre los aires positives et n6gatives d6finies par S(t) entre t o - - x e t t o - - z -~ T, ce qui pout gtre rendu tr~s faible, ffuels flue soient t oe t % en choisissant correctoment S(t) et pourvu flue b ne soit pas trop grand devant a.
En conclusion de cette 6rude, nous pouvons dire flue la n6cessit6 de polariser los fonctions abouti t h une porte en rapport signal sur bruit de 3 dB environ, pour los fonctions particuli~res choisies. Cette conclusion est identique h cello h taquelle arrivent certains auteurs Ill.
V.2. Rfisolution.
La r6solution th6orique maximale en temps est 4gale ~ i / W , off W repr6sente la bande passante du signal, tandis que la r6solution maximale en fr6- fluence (effet DSppler) est 6gale h l I T , off T repr~- sente la dur6e du signal.
P O U R L A D E T E C T I O N 6/7 TechnolOgiquement, la r6s61ution en distance est
limit6e par la structure granulaire de la cible. Or, il pent y avoir jusqu'h t 000 points distincts sur la cible, et comme la totalit6 de la eible est balay6e en t seconde, la limite inf6rieure de la r6solution en temps est t ]1 000 de seconde. Pour 6tre limit6 par ceci, il faudrait un signal de bande passante 6gale h i 000 hertz et los signaux sonar utilis6s sent limit6s h 350 hertz. Pour cette application parti- culibre, le problgme de la l imitation par la structure granulaire de la cible ne se pose pas, mais il faudrait en tenir compte pour d'autres signaux de bande passante plus large.
En ce qui concerne la r6solution en fr6quence, nous avons d6jh gvoqu6 le problbme au paragraphe I I . l , et nous averts vu que la limite de r6solution d6pend de la variation relative totale de n. De route fa~on, ici encore, on ne peut allot au delh de 1000 canaux diff6rents en raison de la granularit6 de la cible, mais l ' importance de cette l imitation vis-h-vis de cello apport6e par la fluctuation de vitesse ne peut gtre appr6ci4e que dans chaque cas particulier.
CONCLUSION
Nous avons vu comment il 6tait possible, par des m6thodes particuli~res d'inscription des m6moires et de lecture, de d6tecter par corr61ation en temps r6el la pr6sence dans un bruit d 'un signal d6pendant de deux param~tres inconnus dent l 'un est un temps et l 'autre un rapport d'affinit6 sur le temps.
Nous avons 6voqu6 rapidement l 'influence des n6cessitds technologiques sur les performances du corr61ateur, et nous averts vu flue le soul point important est une perle en rapport signal sur bruit de 3 dB par rapport au gain maximal th6orique.
BIBLIOGRAPHIE
[1] PAaKS (J. K.). Optical-correlation detector for the audio frequency range. (D6tecteur par corr61ation optique dans los fr6quences audibles.) J. acoust. See. Amer. (fev. t965), 37, nO 2, pp. 268-277.
[2] TALA~NI (A.), FARNETT (E.). New target for radar. (Nouveaux objectifs pour le radar.) Electronics., U. S. A. (d6c. 1967), pp. 58-66.
[3] LvsINcn, (J. P.). Dispositif optique de corr61ation pour la d~tection en temps r~el de la pr6senee dans un bruit d'un signal d6pendant de deux param~tres inconnus. Brevet, PV t27 950 du 13 novembre i967.
[4] BONNET (G.). Sur les corr41ateurs utilisant la quanti- fication des s i g n a u x . - Traitement du signal avec application particuli6re h l'acoustique sous- marine. CEPHAr (1964), p. 337.
Manuscr i t , rer le 17 noeembre I967 , du texte d4velopp4 de la commu- nication pr4sent6e h un colloque sur le traitement du signal et tenu h Nice du 17 au 20 avril t967.
- - 179