Embed Size (px)
Citation preview
Journées non thématiques RESCOM:Déploiement de réseaux de capteurs sansfil pour le suivi de la pollution de l’air
Ahmed BOUBRIMA*, Walid BECHKIT*, Hervé RIVANO*INRIA Urbanet, CITI-Lab, Lyon
14 janvier 2016
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 1/33
Plan
I Contexte, motivations et objectifsII Modèles proposésIII EvaluationIV Conclusion
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 2/33

Introduction
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 3/33

Pollution atmosphérique
Industrialisation croissante
Urbanisation croissante
⇒ 7 millions de morts en 2012
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 4/33

Surveillance de la pollution
- Capteur de pollution -Occupe peu d’espace etpas cherPetite fréquenced’échantillonnage(30sec-120sec)
⇒ Bonne granularité spatialeet temporelle
- Station de surveillancetraditionnelle -
Chère et occupe trop d’espaceGrande fréquence d’échantillonnage(30min-60min)
⇒ Mauvaise granularité spatiale ettemporelle
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 5/33
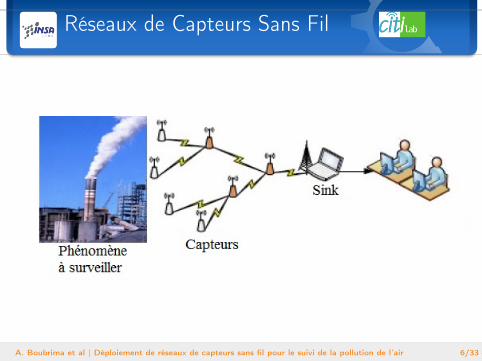
Réseaux de Capteurs Sans Fil
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 6/33
Problématique
Proposer des approches efficaces qui permettent de trouver undéploiement optimal à coût minimum de réseaux de capteurssans fil tout en assurant :
La couverture de la pollutionLa connectivité du réseau
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 7/33
Formulation du problème Dispersion atmosphérique Approche Evaluation
Modèles proposés 1
1. Ahmed Boubrima, Frédéric Matigot, Walid Bechkit, Hervé Rivanoand Anne Ruas. Optimal deployment of wireless sensor networks for airpollution monitoring. in IEEE ICCCN, 2015.
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 8/33
Formulation du problème Dispersion atmosphérique Approche Evaluation
Plan
1 Formulation du problème
2 Dispersion atmosphérique
3 Approche
4 Evaluation
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 9/33
Formulation du problème Dispersion atmosphérique Approche Evaluation
Plan
1 Formulation du problème
2 Dispersion atmosphérique
3 Approche
4 Evaluation
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 10/33
Formulation du problème Dispersion atmosphérique Approche Evaluation
Formulation du problème
Etant donné :1 Un ensemble P de N positions potentielles où les noeuds
peuvent être déployés2 Un ensemble I deM sources de pollution qui doivent
être surveillées
Trouver les positions optimales des capteurs et puits de sorteque :
1 Le coût de déploiement soit minimisé2 Chaque source de pollution dans I soit couverte3 Les noeuds déployés forment un réseau connecté
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 11/33
Formulation du problème Dispersion atmosphérique Approche Evaluation
Formulation du problème
Etant donné :1 Un ensemble P de N positions potentielles où les noeuds
peuvent être déployés2 Un ensemble I deM sources de pollution qui doivent
être surveillées
Trouver les positions optimales des capteurs et puits de sorteque :
1 Le coût de déploiement soit minimisé2 Chaque source de pollution dans I soit couverte3 Les noeuds déployés forment un réseau connecté
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 11/33
Formulation du problème Dispersion atmosphérique Approche Evaluation
Plan
1 Formulation du problème
2 Dispersion atmosphérique
3 Approche
4 Evaluation
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 12/33
Formulation du problème Dispersion atmosphérique Approche Evaluation
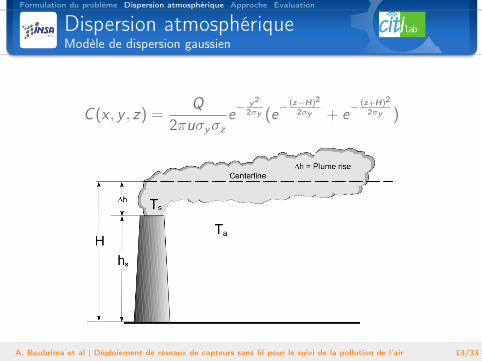
Dispersion atmosphériqueModèle de dispersion gaussien
C (x , y , z) =Q
2πuσyσze−
y22σy (e−
(z−H)2
2σy + e−(z+H)2
2σy )
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 13/33
Formulation du problème Dispersion atmosphérique Approche Evaluation
Plan
1 Formulation du problème
2 Dispersion atmosphérique
3 ApprocheWorkflowIdentification des zones de pollutionDéploiement de RCSF
4 Evaluation
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 14/33
Formulation du problème Dispersion atmosphérique Approche Evaluation
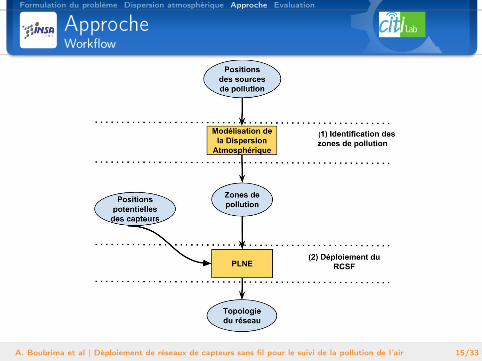
ApprocheWorkflow
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 15/33
Formulation du problème Dispersion atmosphérique Approche Evaluation
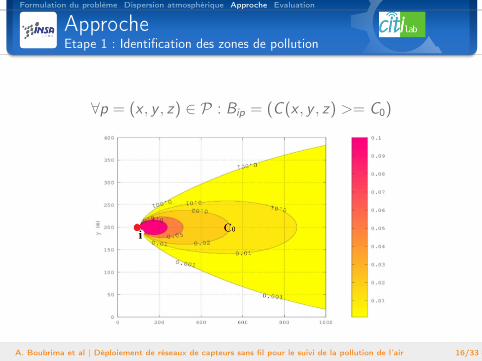
ApprocheEtape 1 : Identification des zones de pollution
∀p = (x , y , z) ∈ P : Bip = (C (x , y , z) >= C0)
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 16/33
Formulation du problème Dispersion atmosphérique Approche Evaluation
ApprocheEtape 2 : Déploiement de RCSF
Soit :1 xp une variable binaire qui définit si un capteur est
déployé en p ∈ P ou non, et c sensorp le coût de
déploiement correspondant.2 yp une variable binaire qui définit si un puits est déployé
en p ∈ P ou non, et c sinkp le coût de déploiement
correspondant.
La fonction objectif est :
Minimize∑p∈P
c sensorp ∗ xp +
∑p∈P
c sinkp ∗ yp
Où :xp + yp ≤ 1, p ∈ P
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 17/33
Formulation du problème Dispersion atmosphérique Approche Evaluation
ApprocheEtape 2 : Déploiement de RCSF
Soit :1 xp une variable binaire qui définit si un capteur est
déployé en p ∈ P ou non, et c sensorp le coût de
déploiement correspondant.2 yp une variable binaire qui définit si un puits est déployé
en p ∈ P ou non, et c sinkp le coût de déploiement
correspondant.
La fonction objectif est :
Minimize∑p∈P
c sensorp ∗ xp +
∑p∈P
c sinkp ∗ yp
Où :xp + yp ≤ 1, p ∈ P
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 17/33
Formulation du problème Dispersion atmosphérique Approche Evaluation
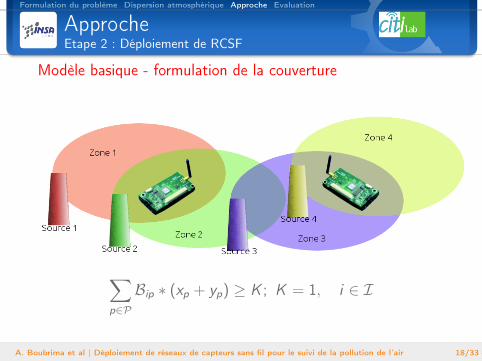
ApprocheEtape 2 : Déploiement de RCSF
Modèle basique - formulation de la couverture
∑p∈P
Bip ∗ (xp + yp) ≥ K ; K = 1, i ∈ I
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 18/33
Formulation du problème Dispersion atmosphérique Approche Evaluation
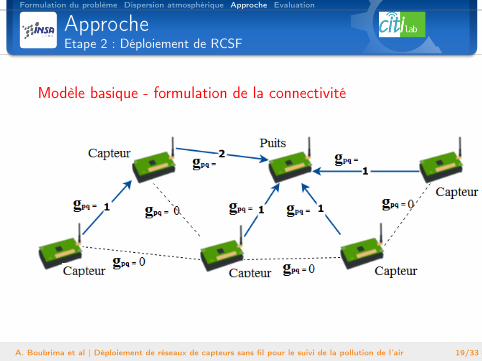
ApprocheEtape 2 : Déploiement de RCSF
Modèle basique - formulation de la connectivité
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 19/33
Formulation du problème Dispersion atmosphérique Approche Evaluation
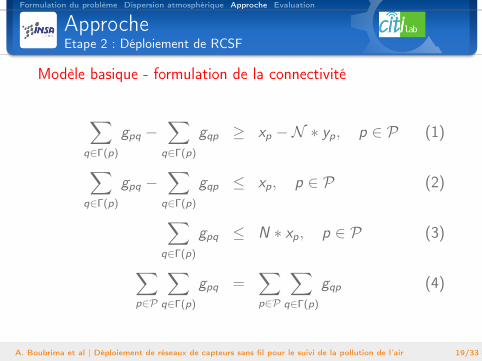
ApprocheEtape 2 : Déploiement de RCSF
Modèle basique - formulation de la connectivité
∑q∈Γ(p)
gpq −∑
q∈Γ(p)
gqp ≥ xp −N ∗ yp, p ∈ P (1)
∑q∈Γ(p)
gpq −∑
q∈Γ(p)
gqp ≤ xp, p ∈ P (2)
∑q∈Γ(p)
gpq ≤ N ∗ xp, p ∈ P (3)
∑p∈P
∑q∈Γ(p)
gpq =∑p∈P
∑q∈Γ(p)
gqp (4)
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 19/33
Formulation du problème Dispersion atmosphérique Approche Evaluation
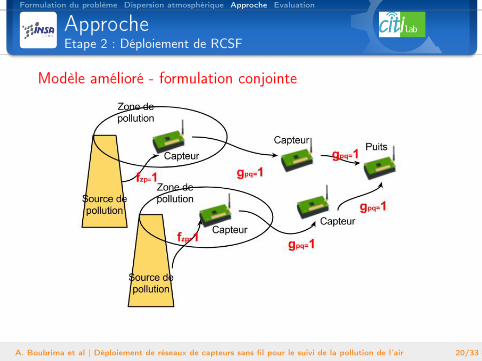
ApprocheEtape 2 : Déploiement de RCSF
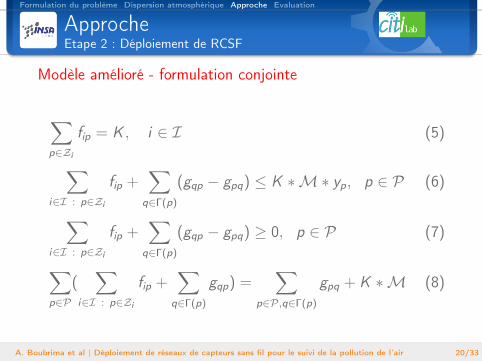
Modèle amélioré - formulation conjointe
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 20/33
Formulation du problème Dispersion atmosphérique Approche Evaluation
ApprocheEtape 2 : Déploiement de RCSF
Modèle amélioré - formulation conjointe
∑p∈Zi
fip = K , i ∈ I (5)
∑i∈I : p∈Zi
fip +∑
q∈Γ(p)
(gqp − gpq) ≤ K ∗M ∗ yp, p ∈ P (6)
∑i∈I : p∈Zi
fip +∑
q∈Γ(p)
(gqp − gpq) ≥ 0, p ∈ P (7)
∑p∈P
(∑
i∈I : p∈Zi
fip +∑
q∈Γ(p)
gqp) =∑
p∈P,q∈Γ(p)
gpq + K ∗M (8)
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 20/33
Formulation du problème Dispersion atmosphérique Approche Evaluation
Plan
1 Formulation du problème
2 Dispersion atmosphérique
3 Approche
4 EvaluationPreuve de conceptTemps d’exécutionÉvaluation de l’impact des paramètres de déploiement
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 21/33
Formulation du problème Dispersion atmosphérique Approche Evaluation
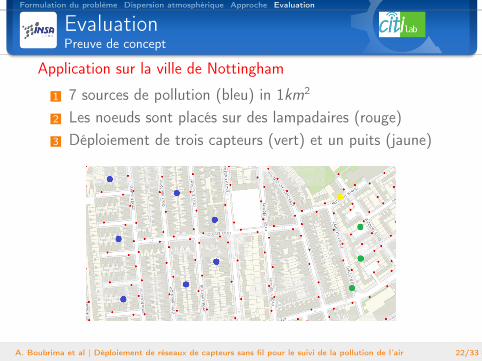
EvaluationPreuve de concept
Application sur la ville de Nottingham
1 7 sources de pollution (bleu) in 1km2
2 Les noeuds sont placés sur des lampadaires (rouge)3 Déploiement de trois capteurs (vert) et un puits (jaune)
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 22/33
Formulation du problème Dispersion atmosphérique Approche Evaluation
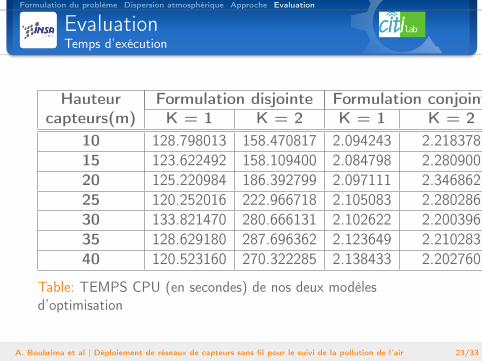
EvaluationTemps d’exécution
Hauteur Formulation disjointe Formulation conjointecapteurs(m) K = 1 K = 2 K = 1 K = 2
10 128.798013 158.470817 2.094243 2.21837815 123.622492 158.109400 2.084798 2.28090020 125.220984 186.392799 2.097111 2.34686225 120.252016 222.966718 2.105083 2.28028630 133.821470 280.666131 2.102622 2.20039635 128.629180 287.696362 2.123649 2.21028340 120.523160 270.322285 2.138433 2.202760
Table: TEMPS CPU (en secondes) de nos deux modèlesd’optimisation
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 23/33
Formulation du problème Dispersion atmosphérique Approche Evaluation
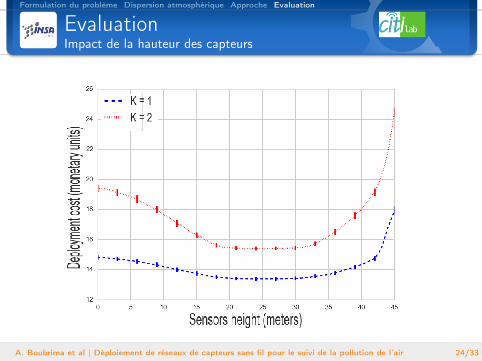
EvaluationImpact de la hauteur des capteurs
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 24/33
Formulation du problème Dispersion atmosphérique Approche Evaluation
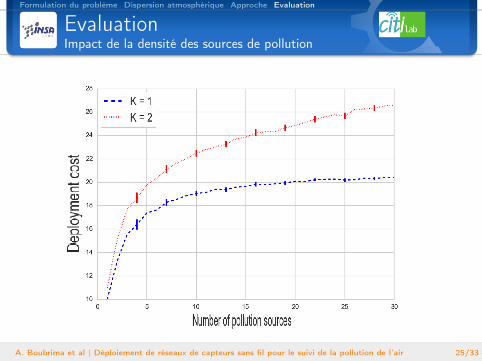
EvaluationImpact de la densité des sources de pollution
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 25/33
Formulation du problème Dispersion atmosphérique Approche Evaluation
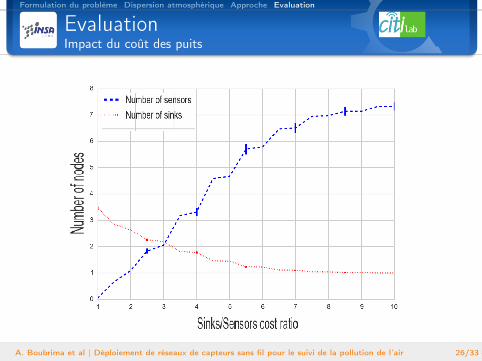
EvaluationImpact du coût des puits
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 26/33
Conclusion & Perspectives
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 27/33
Conclusion
Manque de la prise en compte du phénomène dans lesmodèles de l’état de l’art
Nouveaux modèles de déploiement basés sur lamodélisation du phénomène de la pollution
Formulation nouvelle et conjointe de la couverture et laconnectivité
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 28/33
Perspectives
Etudier l’impact de la topographie urbaine sur lesrésultats de déploiement
Evaluer les approches proposées sur d’autres jeux dedonnées
Proposition de méthodes approchées
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 29/33
References I
I Kuban Altinel, Necati Aras, E Guney, and Cem Ersoy.Effective coverage in sensor networks : binary integerprogramming formulations and heuristics.In ICC’06. IEEE International Conference on, volume 9,pages 4014–4019. IEEE, 2006.
Krishnendu Chakrabarty, S Sitharama Iyengar, Hairong Qi,and Eungchun Cho.Grid coverage for surveillance and target location indistributed sensor networks.Computers, IEEE Transactions on, 51(12) :1448–1453,2002.
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 30/33
References II
Mihaela Cardei, Mohammad O Pervaiz, and Ionut Cardei.Energy-efficient range assignment in heterogeneouswireless sensor networks.In ICWMC’06. International Conference on, pages 11–11.IEEE, 2006.
Mihaela Cardei, My T Thai, Yingshu Li, and Weili Wu.Energy-efficient target coverage in wireless sensornetworks.In INFOCOM 2005. 24th Annual Joint Conference of theIEEE Computer and Communications Societies.Proceedings IEEE, volume 3, pages 1976–1984. IEEE,2005.
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 31/33
References III
Seapahn Meguerdichian and Miodrag Potkonjak.Low power 0/1 coverage and scheduling techniques insensor networks.Technical report, Citeseer, 2003.
Maulin Patel, R Chandrasekaran, and S Venkatesan.Energy efficient sensor, relay and base station placementsfor coverage, connectivity and routing.In IPCCC 2005. 24th IEEE International, pages 581–586.IEEE, 2005.
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 32/33
Merci pour votre attention
Questions ?
Ahmed [email protected]
A. Boubrima et al | Déploiement de réseaux de capteurs sans fil pour le suivi de la pollution de l’air 33/33





























