Embed Size (px)
Citation preview
4474 fr - 2011.04 / e
DYNEO®
Motovariateurs synchrones à aimants permanents
Mise en service
Mise en service
DYNEO®
Motovariateurs synchrones à aimants permanents
2
4474 fr - 2011.04 / eLEROY-SOMER
NOTE
LEROY-SOMER se réserve le droit de modifier les caractéristiques de ses produits à tout moment pour y apporter les derniers développements technologiques. Les informations contenues dans ce document sont donc susceptibles de changer sans avis préalable.
ATTENTION
Pour la sécurité de l’utilisateur, le variateur de vitesse doit être relié à une mise à la terre réglementaire (borne ).
Si un démarrage intempestif de l’installation présente un risque pour les personnes ou les machines entraînées, il est indispensable de respecter les schémas de raccordement de la puissance préconisés dans cette notice.
Le variateur de vitesse comporte des dispositifs de sécurité qui peuvent en cas de problème commander son arrêt et par là même l’arrêt du moteur. Ce moteur peut lui même subir un arrêt par blocage mécanique. Enfin, des variations de tension, des coupures d’alimentation en particulier, peuvent également être à l’origine d’arrêts. La disparition des causes d’arrêt risque de provoquer un redémarrage entraînant un danger pour certaines machines ou installations, en particulier pour celles qui doivent être conformes à l’annexe 1 du décret 92.767 du 29 Juillet 1992 relative à la sécurité.Il importe donc que, dans ces cas-là, l’utilisateur se prémunisse contre les possibilités de redémarrage en cas d’arrêt non programmé du moteur.
Le variateur de vitesse est conçu pour pouvoir alimenter un moteur et la machine entraînée au-delà de sa vitesse nominale.Si le moteur ou la machine ne sont pas prévus mécaniquement pour supporter de telles vitesses, l’utilisateur peut être exposé à de graves dommages consécutifs à leur détérioration mécanique.Il est important que l’utilisateur s’assure, avant de programmer une vitesse élevée, que le système puisse la supporter.
Le variateur de vitesse objet de la présente notice est un composant destiné à être incorporé dans une installation ou machine électrique et ne peut en aucun cas être considéré comme un organe de sécurité. Il appartient donc au fabri-cant de la machine, au concepteur de l’installation ou à l’utilisateur de prendre à sa charge les moyens nécessaires au respect des normes en vigueur et de prévoir les dispositifs destinés à assurer la sécurité des biens et des personnes.
En cas de non respect de ces dispositions, LEROY-SOMER décline toute responsabilité de quelque nature que ce soit.
..........................................
Cette notice ne se substitue pas aux guides d’installation et de mise en service du variateur de vitesse.
3
Mise en service
DYNEO®
Motovariateurs synchrones à aimants permanents
4474 fr - 2011.04 / eLEROY-SOMER
SOMMAIRE
1 - MISE EN SERVICE D’UN MOTEUR À AIMANTS LSRPM AVEC RETOUR PAR CODEURAVEC VOIES DE COMMUTATION OU CAPTEUR À EFFET HALL, PILOTÉ PAR UN VARIATEUR POWERDRIVE .........................................................................................................................................4 1.1 - Raccordement du capteur côté moteur (standard) ......................................................................4 1.2 - Mise en service simplifiee avec variateur POWERDRIVE ..........................................................4
2 - MISE EN SERVICE D’UN MOTEUR À AIMANTS LSRPM AVEC RETOUR PAR CAPTEURÀ EFFET HALL, PILOTÉ PAR UN VARIATEUR UNIDRIVE SP ..............................................................6
3 - MISE EN SERVICE D’UN MOTEUR À AIMANTS LSRPM AVEC RETOUR PAR CODEURAVEC VOIES DE COMMUTATION, PILOTÉ PAR UN VARIATEUR UNIDRIVE SP ................................8 3.1 - Raccordement du capteur côté moteur (standard) ......................................................................8 3.2 - Mise en service simplifiée avec variateur UNIDRIVE SP ............................................................8
4 - MISE EN SERVICE POUR LE PILOTAGE D’UN MOTEUR LSRPM EN MODE «SENSORLESS» (SANS CAPTEUR, PARAMÈTRE 00.14) ...............................................................................................10
5 - CONNECTIQUE ................................................................................................................................11 5.1 - Moteurs .....................................................................................................................................11 5.2 - Capteur à effet Hall ....................................................................................................................11 5.3 - Codeur incrémental à voie de commutation UVW ....................................................................12 5.4 - Ventilation forcée .......................................................................................................................12 5.5 - Frein ..........................................................................................................................................13 5.6 - Sonde CTP ................................................................................................................................13
Mise en service
DYNEO®
Motovariateurs synchrones à aimants permanents
4
4474 fr - 2011.04 / eLEROY-SOMER
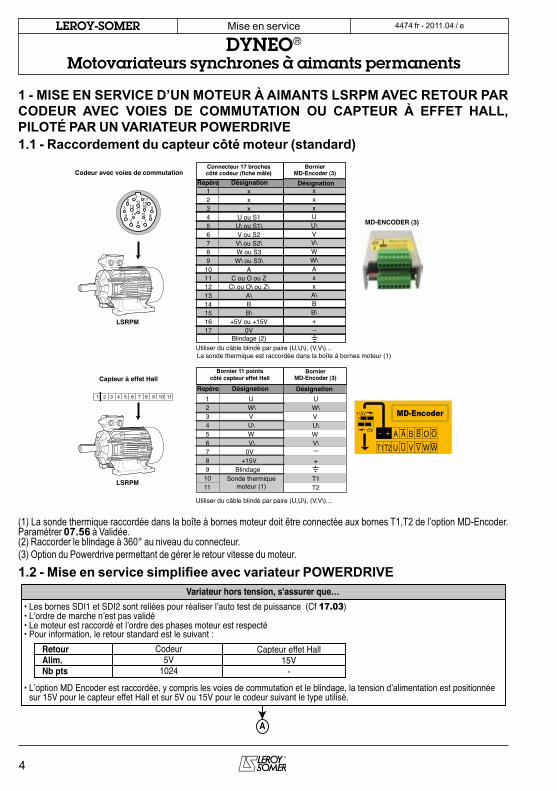
1 - MISE EN SERVICE D’UN MOTEUR À AIMANTS LSRPM AVEC RETOUR PAR CODEUR AVEC VOIES DE COMMUTATION OU CAPTEUR À EFFET HALL, PILOTÉ PAR UN VARIATEUR POWERDRIVE1.1 - Raccordement du capteur côté moteur (standard)
Repère1234567891011121314151617
xxx
U ou S1U\ ou S1\V ou S2V\ ou S2\W ou S3W\ ou S3\
AC ou O ou Z
C\ ou O\ ou Z\A\BB\
+5V ou +15V0V
Blindage (2)
Désignation
Connecteur 17 brochescôté codeur (fiche mâle)
Repère Désignation
Bornier 11 pointscôté capteur effet Hall
1 2 3 4 5 6 7 8 9 10 11 123456789
1011
UW\VU\WV\
0V+15V
BlindageSonde thermique
moteur (1)
Désignation
BornierMD-Encoder (3)
xxxUU\VV\WW\AxxA\BB\+
Codeur avec voies de commutation
Capteur à effet HallDésignation
BornierMD-Encoder (3)
UW\V U\W V\
+
T1T2
La sonde thermique est raccordée dans la boîte à bornes moteur (1)
Utiliser du câble blindé par paire (U,U\), (V,V\)...
Utiliser du câble blindé par paire (U,U\), (V,V\)...
1514
13 16 932
1
45 6 7
81712 11
10
LSRPM
LSRPM
_
_
MD-ENCODER (3)
+15V MD-Encoder
+5V
T1T2 U WU V V W- + A A B OB O
(1) La sonde thermique raccordée dans la boîte à bornes moteur doit être connectée aux bornes T1,T2 de l’option MD-Encoder. Paramétrer 07.56 à Validée.(2) Raccorder le blindage à 360° au niveau du connecteur.(3) Option du Powerdrive permettant de gérer le retour vitesse du moteur.
1.2 - Mise en service simplifiee avec variateur POWERDRIVE
• Les bornes SDI1 et SDI2 sont reliées pour réaliser l’auto test de puissance (Cf 17.03)• L’ordre de marche n’est pas validé• Le moteur est raccordé et l’ordre des phases moteur est respecté• Pour information, le retour standard est le suivant :
• L’option MD Encoder est raccordée, y compris les voies de commutation et le blindage, la tension d’alimentation est positionnée sur 15V pour le capteur effet Hall et sur 5V ou 15V pour le codeur suivant le type utilisé.
Variateur hors tension, s'assurer que…
RetourAlim.Nb pts
Codeur5V
1024
Capteur effet Hall15V-
A
5
Mise en service
DYNEO®
Motovariateurs synchrones à aimants permanents
4474 fr - 2011.04 / eLEROY-SOMER
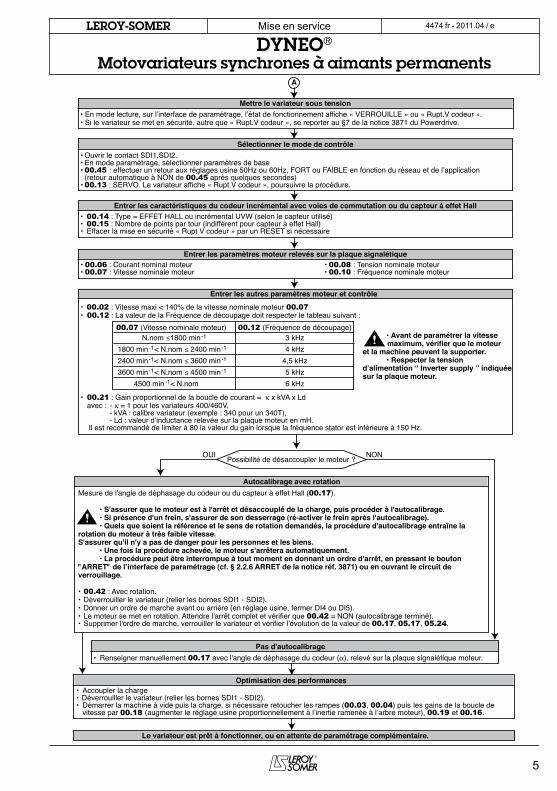
Mesure de l'angle de déphasage du codeur ou du capteur à effet Hall (00.17). • S'assurer que le moteur est à l'arrêt et désaccouplé de la charge, puis procéder à l'autocalibrage. • Si présence d'un frein, s'assurer de son desserrage (ré-activer le frein après l'autocalibrage). • Quels que soient la référence et le sens de rotation demandés, la procédure d'autocalibrage entraîne larotation du moteur à très faible vitesse.S'assurer qu'il n'y a pas de danger pour les personnes et les biens. • Une fois la procédure achevée, le moteur s'arrêtera automatiquement. • La procédure peut être interrompue à tout moment en donnant un ordre d'arrêt, en pressant le bouton"ARRET" de l’interface de paramétrage (cf. § 2.2.6 ARRET de la notice réf. 3871) ou en ouvrant le circuit deverrouillage.
• 00.42 : Avec rotation.• Déverrouiller le variateur (relier les bornes SDI1 - SDI2).• Donner un ordre de marche avant ou arrière (en réglage usine, fermer DI4 ou DI5).• Le moteur se met en rotation. Attendre l'arrêt complet et vérifier que 00.42 = NON (autocalibrage terminé).• Supprimer l'ordre de marche, verrouiller le variateur et vérifier l’évolution de la valeur de 00.17, 05.17, 05.24.
• En mode lecture, sur l’interface de paramétrage, l’état de fonctionnement affiche « VERROUILLE » ou « Rupt.V codeur ».Mettre le variateur sous tension
• Ouvrir le contact SDI1,SDI2.• En mode paramétrage, sélectionner paramètres de base • 00.45 : effectuer un retour aux réglages usine 50Hz ou 60Hz, FORT ou FAIBLE en fonction du réseau et de l’application (retour automatique à NON de 00.45 après quelques secondes) • 00.13 : SERVO. Le variateur affiche « Rupt.V codeur », poursuivre la procédure.
Sélectionner le mode de contrôle
• 00.06 : Courant nominal moteur• 00.07 : Vitesse nominale moteur
• 00.08 : Tension nominale moteur• 00.10 : Fréquence nominale moteur
Entrer les paramètres moteur relevés sur la plaque signalétique
• 00.14 : Type = EFFET HALL ou incrémental UVW (selon le capteur utilisé)• 00.15 : Nombre de points par tour (indifférent pour capteur à effet Hall) • Effacer la mise en sécurité « Rupt V codeur » par un RESET si nécessaire
Entrer les caractéristiques du codeur incrémental avec voies de commutation ou du capteur à effet Hall
• 00.02 : Vitesse maxi < 140% de la vitesse nominale moteur 00.07• 00.12 : La valeur de la Fréquence de découpage doit respecter le tableau suivant :
• 00.21 : Gain proportionnel de la boucle de courant = κ x kVA x Ld avec : - κ = 1 pour les variateurs 400/460V, - kVA : calibre variateur (exemple : 340 pour un 340T), - Ld : valeur d’inductance relevée sur la plaque moteur en mH. Il est recommandé de limiter à 80 la valeur du gain lorsque la fréquence stator est inférieure à 150 Hz.
Entrer les autres paramètres moteur et contrôle
• Renseigner manuellement 00.17 avec l'angle de déphasage du codeur (α), relevé sur la plaque signalétique moteur.
Possibilité de désaccoupler le moteur ?OUI NON
Autocalibrage avec rotation
• Accoupler la charge• Déverrouiller le variateur (relier les bornes SDI1 - SDI2).• Démarrer la machine à vide puis la charge, si nécessaire retoucher les rampes (00.03, 00.04) puis les gains de la boucle de vitesse par 00.18 (augmenter le réglage usine proportionnellement à l’inertie ramenée à l’arbre moteur), 00.19 et 00.16.
Optimisation des performances
Pas d'autocalibrage
Le variateur est prêt à fonctionner, ou en attente de paramétrage complémentaire.
• Si le variateur se met en sécurité, autre que « Rupt.V codeur », se reporter au §7 de la notice 3871 du Powerdrive.
A
• Avant de paramétrer la vitesse maximum, vérifier que le moteuret la machine peuvent la supporter. • Respecter la tensiond’alimentation “ Inverter supply ” indiquéesur la plaque moteur.
00.07 (Vitesse nominale moteur) 00.12 (Fréquence de découpage)N.nom ≤1800 min
1800 min < N.nom ≤ 2400 min 2400 min < N.nom ≤ 3600 min 3600 min < N.nom ≤ 4500 min
4500 min < N.nom
3 kHz4 kHz
4,5 kHz5 kHz6 kHz
-1
-1-1
-1-1
-1-1
-1
Mise en service
DYNEO®
Motovariateurs synchrones à aimants permanents
6
4474 fr - 2011.04 / eLEROY-SOMER
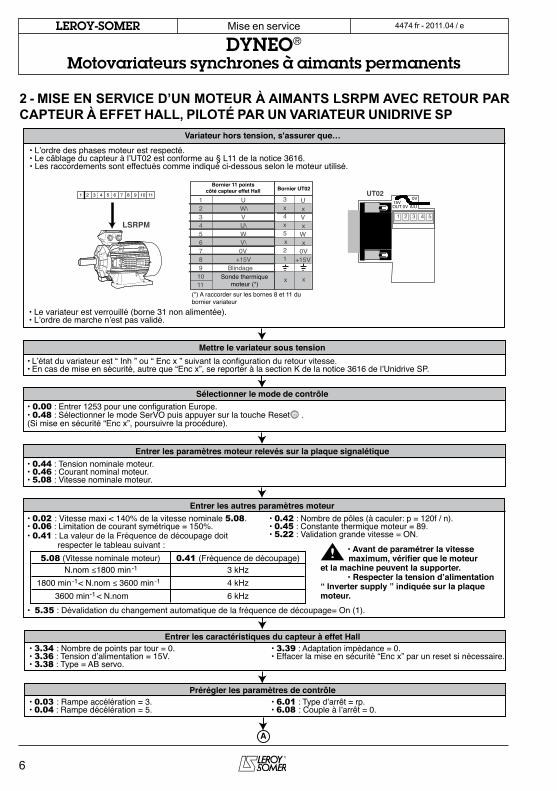
2 - MISE EN SERVICE D’UN MOTEUR À AIMANTS LSRPM AVEC RETOUR PAR CAPTEUR À EFFET HALL, PILOTÉ PAR UN VARIATEUR UNIDRIVE SP
• L’ordre des phases moteur est respecté.• Le câblage du capteur à l’UT02 est conforme au § L11 de la notice 3616.
• Le variateur est verrouillé (borne 31 non alimentée).• L’ordre de marche n’est pas validé.
Variateur hors tension, s'assurer que…
• 0.00 : Entrer 1253 pour une configuration Europe.• 0.48 : Sélectionner le mode SerVO puis appuyer sur la touche Reset .(Si mise en sécurité “Enc x”, poursuivre la procédure).
Sélectionner le mode de contrôle
• L’état du variateur est “ Inh ” ou “ Enc x ” suivant la configuration du retour vitesse.• En cas de mise en sécurité, autre que “Enc x”, se reporter à la section K de la notice 3616 de l’Unidrive SP.
Mettre le variateur sous tension
• 0.44 : Tension nominale moteur.• 0.46 : Courant nominal moteur.• 5.08 : Vitesse nominale moteur.
Entrer les paramètres moteur relevés sur la plaque signalétique
• 0.02 : Vitesse maxi < 140% de la vitesse nominale 5.08.• 0.06 : Limitation de courant symétrique = 150%.• 0.41 : La valeur de la Fréquence de découpage doit respecter le tableau suivant :
• 0.42 : Nombre de pôles (à caculer: p = 120f / n).• 0.45 : Constante thermique moteur = 89.• 5.22 : Validation grande vitesse = ON.
Entrer les autres paramètres moteur
• 0.03 : Rampe accélération = 3.• 0.04 : Rampe décélération = 5.
• 6.01 : Type d’arrêt = rp.• 6.08 : Couple à l’arrêt = 0.
Prérégler les paramètres de contrôle
• 3.34 : Nombre de points par tour = 0.• 3.36 : Tension d’alimentation = 15V.• 3.38 : Type = AB servo.
• 3.39 : Adaptation impédance = 0.• Effacer la mise en sécurité “Enc x” par un reset si nécessaire.
Entrer les caractéristiques du capteur à effet Hall
LSRPM
1 2 3 4 5 6 7 8 9 10 111234567891011
15VOUT 0V A/U
0V
21 3 4 5
A
UW\VU\WV\0V
+15VBlindage
Sonde thermiquemoteur (*)
(*) A raccorder sur les bornes 8 et 11 dubornier variateur
Bornier 11 pointscôté capteur effet Hall Bornier UT02
UxVxWx
0V+15V
• Les raccordements sont effectués comme indiqué ci-dessous selon le moteur utilisé.
UT023x4x5x21
x x
5.08 (Vitesse nominale moteur) 0.41 (Fréquence de découpage)N.nom ≤1800 min
1800 min < N.nom ≤ 3600 min 3600 min < N.nom
3 kHz4 kHz6 kHz
-1
-1-1
-1
• Avant de paramétrer la vitesse maximum, vérifier que le moteuret la machine peuvent la supporter. • Respecter la tension d’alimentation“ Inverter supply ” indiquée sur la plaquemoteur.
• 5.35 : Dévalidation du changement automatique de la fréquence de découpage= On (1).
7
Mise en service
DYNEO®
Motovariateurs synchrones à aimants permanents
4474 fr - 2011.04 / eLEROY-SOMER
• Accoupler la charge.• Déverrouiller le variateur (fermer la borne 31).• Mettre en marche la machine et reprendre les rampes 0.03, 0.04 et les gains si nécessaire : - de la boucle de vitesse par 3.10, 3.11, 3.42, - de la boucle de courant par 4.13 et 4.14.
Optimisation des performances
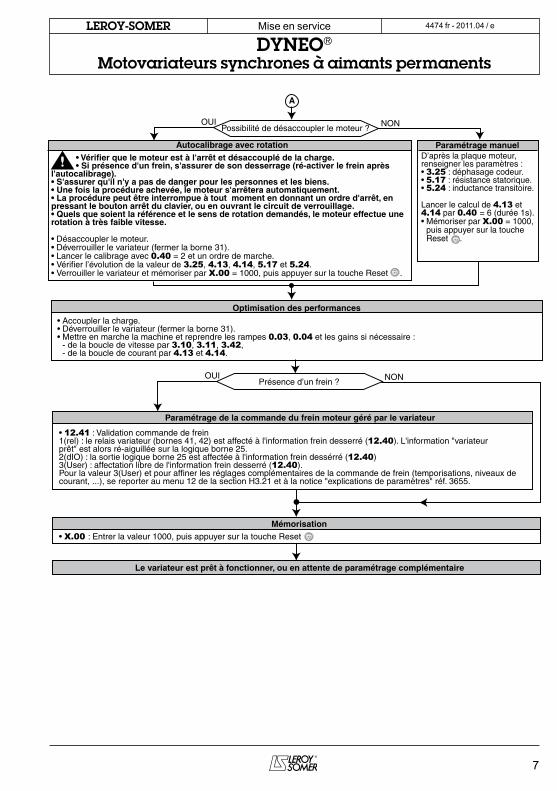
Présence d’un frein ?OUI NON
Le variateur est prêt à fonctionner, ou en attente de paramétrage complémentaire
• X.00 : Entrer la valeur 1000, puis appuyer sur la touche Reset
Mémorisation
• 12.41 : Validation commande de frein1(rel) : le relais variateur (bornes 41, 42) est affecté à l'information frein desserré (12.40). L'information "variateurprêt" est alors ré-aiguillée sur la logique borne 25.2(dIO) : la sortie logique borne 25 est affectée à l'information frein dessérré (12.40)3(User) : affectation libre de l'information frein desserré (12.40).Pour la valeur 3(User) et pour affiner les réglages complémentaires de la commande de frein (temporisations, niveaux decourant, ...), se reporter au menu 12 de la section H3.21 et à la notice "explications de paramètres" réf. 3655.
Paramétrage de la commande du frein moteur géré par le variateur
Possibilité de désaccoupler le moteur ?OUI NON
D’après la plaque moteur,renseigner les paramètres :• 3.25 : déphasage codeur.• 5.17 : résistance statorique.• 5.24 : inductance transitoire.
Lancer le calcul de 4.13 et4.14 par 0.40 = 6 (durée 1s). • Mémoriser par X.00 = 1000, puis appuyer sur la touche Reset .
Paramétrage manuel • Vérifier que le moteur est à l'arrêt et désaccouplé de la charge. • Si présence d'un frein, s'assurer de son desserrage (ré-activer le frein aprèsl'autocalibrage).• S'assurer qu'il n'y a pas de danger pour les personnes et les biens.• Une fois la procédure achevée, le moteur s'arrêtera automatiquement.• La procédure peut être interrompue à tout moment en donnant un ordre d'arrêt, enpressant le bouton arrêt du clavier, ou en ouvrant le circuit de verrouillage.• Quels que soient la référence et le sens de rotation demandés, le moteur effectue unerotation à très faible vitesse.
• Désaccoupler le moteur.• Déverrouiller le variateur (fermer la borne 31).• Lancer le calibrage avec 0.40 = 2 et un ordre de marche.• Vérifier l’évolution de la valeur de 3.25, 4.13, 4.14, 5.17 et 5.24.• Verrouiller le variateur et mémoriser par X.00 = 1000, puis appuyer sur la touche Reset .
Autocalibrage avec rotation
A
Mise en service
DYNEO®
Motovariateurs synchrones à aimants permanents
8
4474 fr - 2011.04 / eLEROY-SOMER
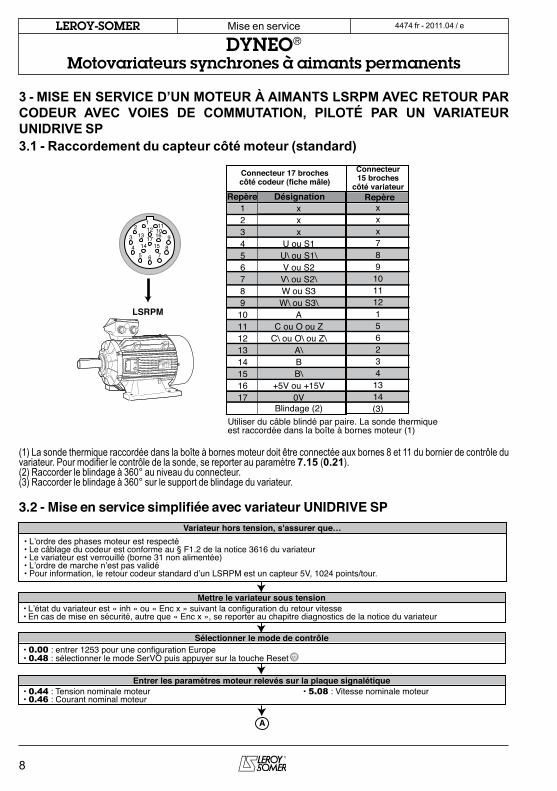
3 - MISE EN SERVICE D’UN MOTEUR À AIMANTS LSRPM AVEC RETOUR PAR CODEUR AVEC VOIES DE COMMUTATION, PILOTÉ PAR UN VARIATEUR UNIDRIVE SP3.1 - Raccordement du capteur côté moteur (standard)
Repère Désignation
Connecteur 17 brochescôté codeur (fiche mâle)
1514
13 16 932
1
45 6 7
81712 11
10
LSRPM
Connecteur15 broches
côté variateur
xxx7891011121562341314(3)
Repèrexxx
U ou S1U\ ou S1\V ou S2V\ ou S2\W ou S3W\ ou S3\
AC ou O ou Z
C\ ou O\ ou Z\A\BB\
+5V ou +15V0V
Blindage (2)
1234567891011121314151617
Utiliser du câble blindé par paire. La sonde thermiqueest raccordée dans la boîte à bornes moteur (1)
(1) La sonde thermique raccordée dans la boîte à bornes moteur doit être connectée aux bornes 8 et 11 du bornier de contrôle du variateur. Pour modifier le contrôle de la sonde, se reporter au paramètre 7.15 (0.21).(2) Raccorder le blindage à 360° au niveau du connecteur.(3) Raccorder le blindage à 360° sur le support de blindage du variateur.
3.2 - Mise en service simplifiée avec variateur UNIDRIVE SP
• L’ordre des phases moteur est respecté• Le câblage du codeur est conforme au § F1.2 de la notice 3616 du variateur• Le variateur est verrouillé (borne 31 non alimentée) • L’ordre de marche n’est pas validé• Pour information, le retour codeur standard d’un LSRPM est un capteur 5V, 1024 points/tour.
Variateur hors tension, s'assurer que…
• 0.00 : entrer 1253 pour une configuration Europe• 0.48 : sélectionner le mode SerVO puis appuyer sur la touche Reset
• 0.44 : Tension nominale moteur • 0.46 : Courant nominal moteur
• 5.08 : Vitesse nominale moteur
Sélectionner le mode de contrôle
• L’état du variateur est « inh » ou « Enc x » suivant la configuration du retour vitesse • En cas de mise en sécurité, autre que « Enc x », se reporter au chapitre diagnostics de la notice du variateur
Mettre le variateur sous tension
Entrer les paramètres moteur relevés sur la plaque signalétique
A
9
Mise en service
DYNEO®
Motovariateurs synchrones à aimants permanents
4474 fr - 2011.04 / eLEROY-SOMER
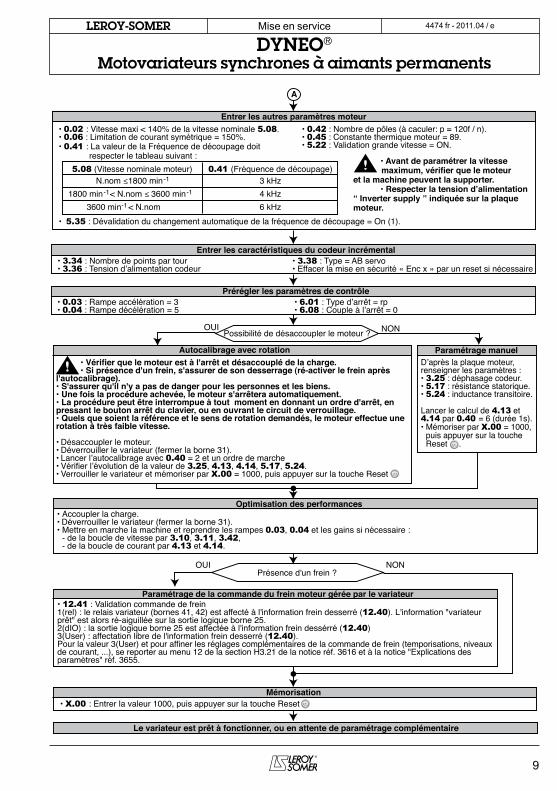
Entrer les autres paramètres moteur
• 3.34 : Nombre de points par tour • 3.36 : Tension d’alimentation codeur
• 3.38 : Type = AB servo • Effacer la mise en sécurité « Enc x » par un reset si nécessaire
Entrer les caractéristiques du codeur incrémental
• 0.03 : Rampe accélération = 3• 0.04 : Rampe décélération = 5
• 6.01 : Type d’arrêt = rp• 6.08 : Couple à l’arrêt = 0
Prérégler les paramètres de contrôle
Possibilité de désaccoupler le moteur ?OUI NON
Le variateur est prêt à fonctionner, ou en attente de paramétrage complémentaire
Présence d'un frein ?OUI NON
• X.00 : Entrer la valeur 1000, puis appuyer sur la touche ResetMémorisation
• 12.41 : Validation commande de frein1(rel) : le relais variateur (bornes 41, 42) est affecté à l'information frein desserré (12.40). L'information "variateurprêt" est alors ré-aiguillée sur la sortie logique borne 25.2(dIO) : la sortie logique borne 25 est affectée à l'information frein dessérré (12.40)3(User) : affectation libre de l'information frein desserré (12.40).Pour la valeur 3(User) et pour affiner les réglages complémentaires de la commande de frein (temporisations, niveauxde courant, ...), se reporter au menu 12 de la section H3.21 de la notice réf. 3616 et à la notice "Explications desparamètres" réf. 3655.
Paramétrage de la commande du frein moteur gérée par le variateur
Paramétrage manuel • Vérifier que le moteur est à l'arrêt et désaccouplé de la charge. • Si présence d'un frein, s'assurer de son desserrage (ré-activer le frein aprèsl'autocalibrage).• S'assurer qu'il n'y a pas de danger pour les personnes et les biens.• Une fois la procédure achevée, le moteur s'arrêtera automatiquement.• La procédure peut être interrompue à tout moment en donnant un ordre d'arrêt, enpressant le bouton arrêt du clavier, ou en ouvrant le circuit de verrouillage.• Quels que soient la référence et le sens de rotation demandés, le moteur effectue unerotation à très faible vitesse.
• Désaccoupler le moteur.• Déverrouiller le variateur (fermer la borne 31).• Lancer l’autocalibrage avec 0.40 = 2 et un ordre de marche• Vérifier l’évolution de la valeur de 3.25, 4.13, 4.14, 5.17, 5.24.• Verrouiller le variateur et mémoriser par X.00 = 1000, puis appuyer sur la touche Reset
Autocalibrage avec rotation
Optimisation des performances• Accoupler la charge.• Déverrouiller le variateur (fermer la borne 31).• Mettre en marche la machine et reprendre les rampes 0.03, 0.04 et les gains si nécessaire : - de la boucle de vitesse par 3.10, 3.11, 3.42, - de la boucle de courant par 4.13 et 4.14.
A
D’après la plaque moteur,renseigner les paramètres :• 3.25 : déphasage codeur.• 5.17 : résistance statorique.• 5.24 : inductance transitoire.
Lancer le calcul de 4.13 et4.14 par 0.40 = 6 (durée 1s). • Mémoriser par X.00 = 1000, puis appuyer sur la touche Reset .
• 0.02 : Vitesse maxi < 140% de la vitesse nominale 5.08.• 0.06 : Limitation de courant symétrique = 150%.• 0.41 : La valeur de la Fréquence de découpage doit respecter le tableau suivant :
• 0.42 : Nombre de pôles (à caculer: p = 120f / n).• 0.45 : Constante thermique moteur = 89.• 5.22 : Validation grande vitesse = ON.
5.08 (Vitesse nominale moteur) 0.41 (Fréquence de découpage)N.nom ≤1800 min
1800 min < N.nom ≤ 3600 min 3600 min < N.nom
3 kHz4 kHz6 kHz
-1
-1-1
-1
• Avant de paramétrer la vitesse maximum, vérifier que le moteuret la machine peuvent la supporter. • Respecter la tension d’alimentation“ Inverter supply ” indiquée sur la plaquemoteur.
• 5.35 : Dévalidation du changement automatique de la fréquence de découpage = On (1).
Mise en service
DYNEO®
Motovariateurs synchrones à aimants permanents
10
4474 fr - 2011.04 / eLEROY-SOMER
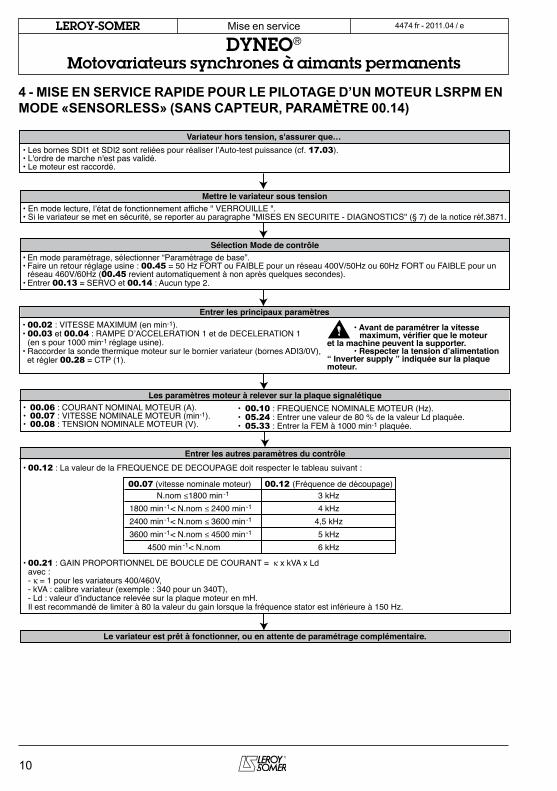
4 - MISE EN SERVICE RAPIDE POUR LE PILOTAGE D’UN MOTEUR LSRPM EN MODE «SENSORLESS» (SANS CAPTEUR, PARAMÈTRE 00.14)
• Les bornes SDI1 et SDI2 sont reliées pour réaliser l’Auto-test puissance (cf. 17.03).• L'ordre de marche n'est pas validé.• Le moteur est raccordé.
Variateur hors tension, s'assurer que…
• En mode lecture, l’état de fonctionnement affiche " VERROUILLE ".• Si le variateur se met en sécurité, se reporter au paragraphe "MISES EN SECURITE - DIAGNOSTICS" (§ 7) de la notice réf.3871.
Mettre le variateur sous tension
• En mode paramétrage, sélectionner “Paramétrage de base”.• Faire un retour réglage usine : 00.45 = 50 Hz FORT ou FAIBLE pour un réseau 400V/50Hz ou 60Hz FORT ou FAIBLE pour un réseau 460V/60Hz (00.45 revient automatiquement à non après quelques secondes).• Entrer 00.13 = SERVO et 00.14 : Aucun type 2.
Sélection Mode de contrôle
• 00.02 : VITESSE MAXIMUM (en min-1).• 00.03 et 00.04 : RAMPE D’ACCELERATION 1 et de DECELERATION 1 (en s pour 1000 min-1 réglage usine).• Raccorder la sonde thermique moteur sur le bornier variateur (bornes ADI3/0V), et régler 00.28 = CTP (1).
Entrer les principaux paramètres
• 00.06 : COURANT NOMINAL MOTEUR (A).• 00.07 : VITESSE NOMINALE MOTEUR (min-1).• 00.08 : TENSION NOMINALE MOTEUR (V).
• 00.10 : FREQUENCE NOMINALE MOTEUR (Hz). • 05.24 : Entrer une valeur de 80 % de la valeur Ld plaquée.• 05.33 : Entrer la FEM à 1000 min-1 plaquée.
Les paramètres moteur à relever sur la plaque signalétique
• Avant de paramétrer la vitesse maximum, vérifier que le moteuret la machine peuvent la supporter. • Respecter la tension d’alimentation“ Inverter supply ” indiquée sur la plaquemoteur.
• 00.12 : La valeur de la FREQUENCE DE DECOUPAGE doit respecter le tableau suivant :
• 00.21 : GAIN PROPORTIONNEL DE BOUCLE DE COURANT = κ x kVA x Ld avec : - κ = 1 pour les variateurs 400/460V, - kVA : calibre variateur (exemple : 340 pour un 340T), - Ld : valeur d’inductance relevée sur la plaque moteur en mH. Il est recommandé de limiter à 80 la valeur du gain lorsque la fréquence stator est inférieure à 150 Hz.
Entrer les autres paramètres du contrôle
Le variateur est prêt à fonctionner, ou en attente de paramétrage complémentaire.
00.07 (vitesse nominale moteur) 00.12 (Fréquence de découpage)N.nom ≤1800 min
1800 min < N.nom ≤ 2400 min 2400 min < N.nom ≤ 3600 min 3600 min < N.nom ≤ 4500 min
4500 min < N.nom
3 kHz4 kHz
4,5 kHz5 kHz6 kHz
-1
-1-1
-1-1
-1-1
-1
11
Mise en service
DYNEO®
Motovariateurs synchrones à aimants permanents
4474 fr - 2011.04 / eLEROY-SOMER
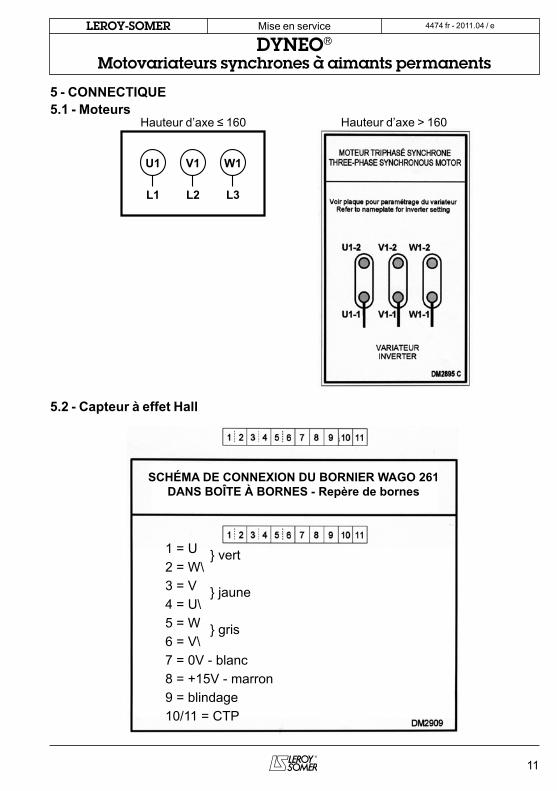
5 - CONNECTIQUE5.1 - Moteurs
U1
L1
V1
L2
W1
L3
5.2 - Capteur à effet Hall
Hauteur d’axe ≤ 160 Hauteur d’axe > 160
SCHÉMA DE CONNEXION DU BORNIER WAGO 261DANS BOÎTE À BORNES - Repère de bornes
1 = U2 = W\3 = V4 = U\5 = W6 = V\7 = 0V - blanc8 = +15V - marron9 = blindage10/11 = CTP
} vert
} jaune
} gris
Mise en service
DYNEO®
Motovariateurs synchrones à aimants permanents
12
4474 fr - 2011.04 / eLEROY-SOMER
5.3 - Codeur incrémental à voie de commutation UVW
Fonction U U/ V V/ W W/ A Z Z/ A/ B B/ Vcc Gnd
Fil Blanc-Vert
Blanc-Rose
Blanc-Jaune
Blanc-Bleu
Blanc-Gris
Blanc-Brun Vert Gris Rouge Rose Jaune Bleu Brun Blanc
M2317 broches 4 5 6 7 8 9 10 11 12 13 14 15 16 17
Les broches 1 à 3 ne sont pas connectées. Le blindage général du câble relié au boîtier du codeur
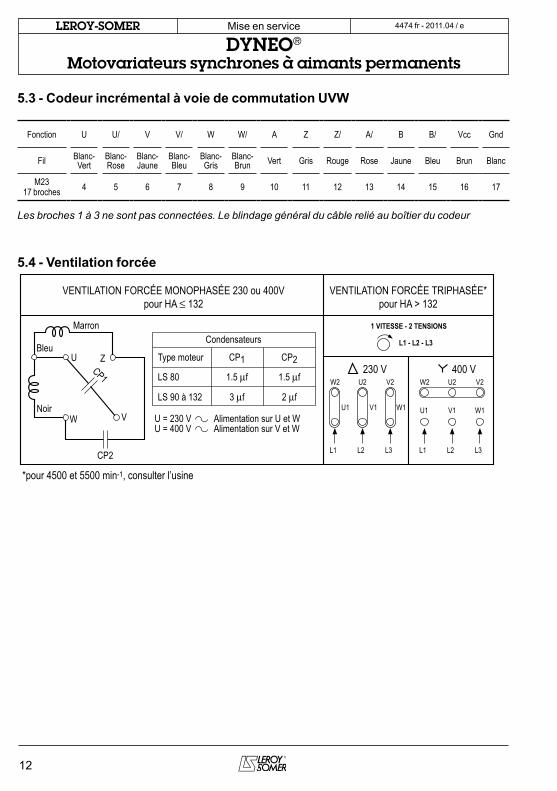
5.4 - Ventilation forcée
NoirW V
CP2
CP1
ZUBleu
Marron
Type moteur
Condensateurs
CP1 CP2
LS 80 1.5 µf 1.5 µf
LS 90 à 132
U = 230 V Alimentation sur U et WU = 400 V Alimentation sur V et W
3 µf 2 µf
VENTILATION FORCÉE MONOPHASÉE 230 ou 400Vpour HA ≤ 132
VENTILATION FORCÉE TRIPHASÉE*pour HA > 132
*pour 4500 et 5500 min-1, consulter l’usine
1 VITESSE - 2 TENSIONS
L1 - L2 - L3
W2 U2 V2
L1 L2 L3
U1 V1 W1
W2 U2 V2
L1 L2 L3
U1 V1 W1
230 V 400 V
13
Mise en service
DYNEO®
Motovariateurs synchrones à aimants permanents
4474 fr - 2011.04 / eLEROY-SOMER
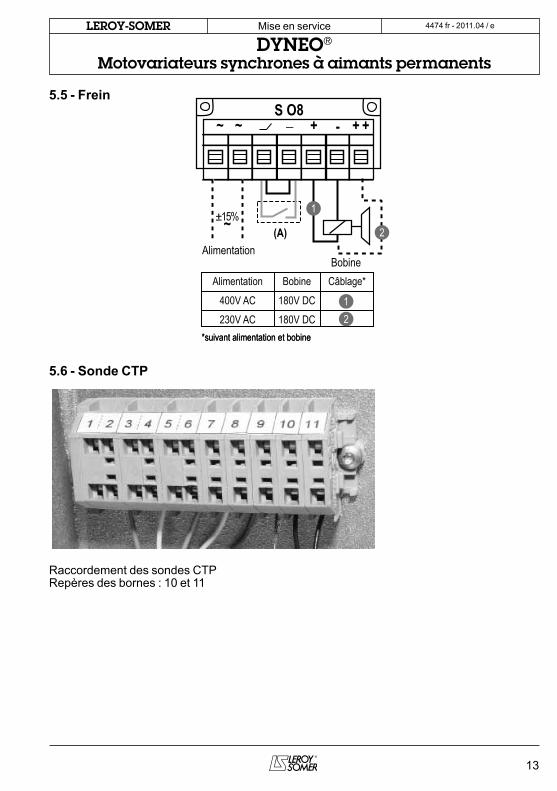
5.5 - Frein
Alimentation Bobine400V AC230V AC
180V DC180V DC
Câblage*
21
BobineAlimentation
S O8~
~
~ _ -+ + +
(A)±15%
2
1
*suivant alimentation et bobine*suivant alimentation et bobine
5.6 - Sonde CTP
Raccordement des sondes CTPRepères des bornes : 10 et 11

Mise en service
DYNEO®
Motovariateurs synchrones à aimants permanents
14
4474 fr - 2011.04 / eLEROY-SOMER
15
Mise en service
DYNEO®
Motovariateurs synchrones à aimants permanents
4474 fr - 2011.04 / eLEROY-SOMER
MOTEURS LEROY-SOMER 16015 ANGOULÊME CEDEX - FRANCE
338 567 258 RCS ANGOULÊMES.A. au capital de 62 779 000 €
www.leroy-somer.com