Embed Size (px)
Citation preview
TD BTS_CIM MODULE 1 : CAPTEURS
Règles pour l'écriture des unités: http://www.bipm.fr/ AU BUREAU INTERNATIONAL DES POIDS ET MESURES Eclipse à Chéraute
1__EXERCICE :CAPTEUR DE FORCE À JAUGES D’EXTENSOMÉTRIE OU DE CONTRAINTES(VOIR TP)
1.1. A PARTIR DU SCHÉMA STRUCTUREL DU CAPTEUR DE FORCE , FAIRE LE SCHÉMA BLOC AVEC LES DIFFÉRENTS ÉLÉMENTS CONSTITUANT CE CAPTEUR .
Capteur extensométrique ( pont 4 jauges)
vdE
J2R2
Mc
R3J3
J1R1
BA
J4R4
-+
Mi
AD V
vs
YA
+
YB
ON S'INSPIRERA DU SCHÉMA BLOC VU EN COURS (CONSTITUTION D'UN CAPTEUR )
1.2__A PARTIR DU SCHÉMASTRUCTUREL DU conditionneur en pont de GRAËTZ:
1.2.1__Calculer, VAM et vBM au REPOS(équilibre du pont).
1.2.2__ AN: Ri = 350 ; qqsoit i = 1 à 4 au REPOS(équilibre du pont); E = 5V .
1.2.3__Calculer vd au REPOS(équilibre du pont). JUSTIFIER LE TERME ÉQUILIBRE .
1.2.4__Calculer RAB au REPOS(équilibre du pont).(Dipôle AB rendu passif en débranchant « E »)
Physique AppliquéeLycée du Pays de souleTP 15/09/10TDMod1BTSCapteur.odtDjlPage: 1 / 17
TD BTS_CIM MODULE 1 : CAPTEURS
Règles pour l'écriture des unités: http://www.bipm.fr/ AU BUREAU INTERNATIONAL DES POIDS ET MESURES Eclipse à Chéraute
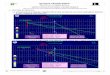
1.3__A PARTIR DE LA COURBE D'ÉTALONNAGE RELEVÉE LORS DU TP CAPTEUR DE FORCE À JAUGES D’EXTENSOMÉTRIE,DONNER L'EXPRESSION DONNANT F(N) EN FONCTION DE Vs(V). SOIT : F = a.Vs+b
Capteur de force extensiométrique; Avec carte Ad à 5 Aop réglée à Ad = 141
y = 0,1246x + 0,0031
R2 = 0,9999
0
0,5
1
0 1 2 3 4 5 6 7 8 9 10
Poids (N)
Te
nsi
on
Vs
(V)
PRINCIPE DU XYLOPHONE ET DES CAPTEURS DE FORCE OU DÉFORMATION À CORDE VIBRANTE ( GRANDE ARCHE DE LA DÉFENSE À PARIS (92))
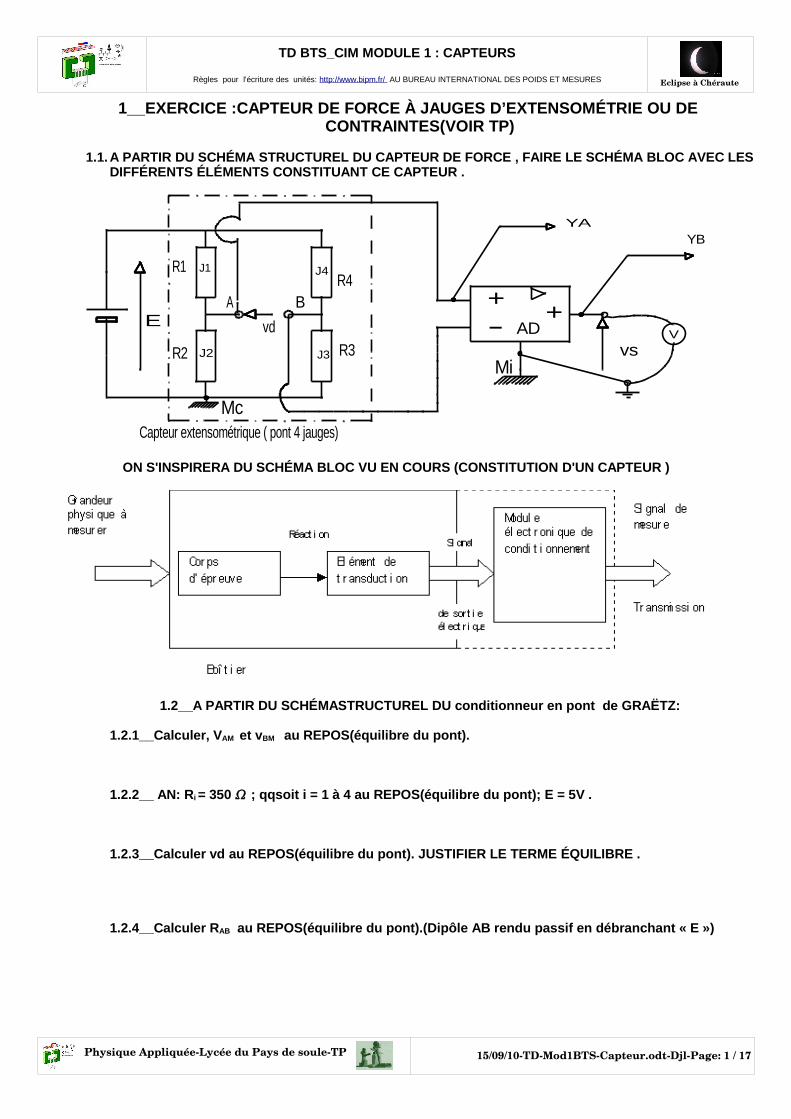
1.4__A PARTIR DE L'OSCILLOGRAMME DE VS(T) LORS DE L'OSCILLATION LIBRE AMORTIE DE LA LAME :
1.4.1__Calculer la pseudo période TP, puis la pseudo-fréquence fP, d'oscillation de la lame pour LES 2 LONGUEURS LIBRES L.
Excitation de la lame vers le hautEncastrement avancé. L= 190 mm
Excitation de la lame vers le hautEncastrement extrême . L = 220 mm
Physique AppliquéeLycée du Pays de souleTP 15/09/10TDMod1BTSCapteur.odtDjlPage: 2 / 17
TD BTS_CIM MODULE 1 : CAPTEURS
Règles pour l'écriture des unités: http://www.bipm.fr/ AU BUREAU INTERNATIONAL DES POIDS ET MESURES Eclipse à Chéraute
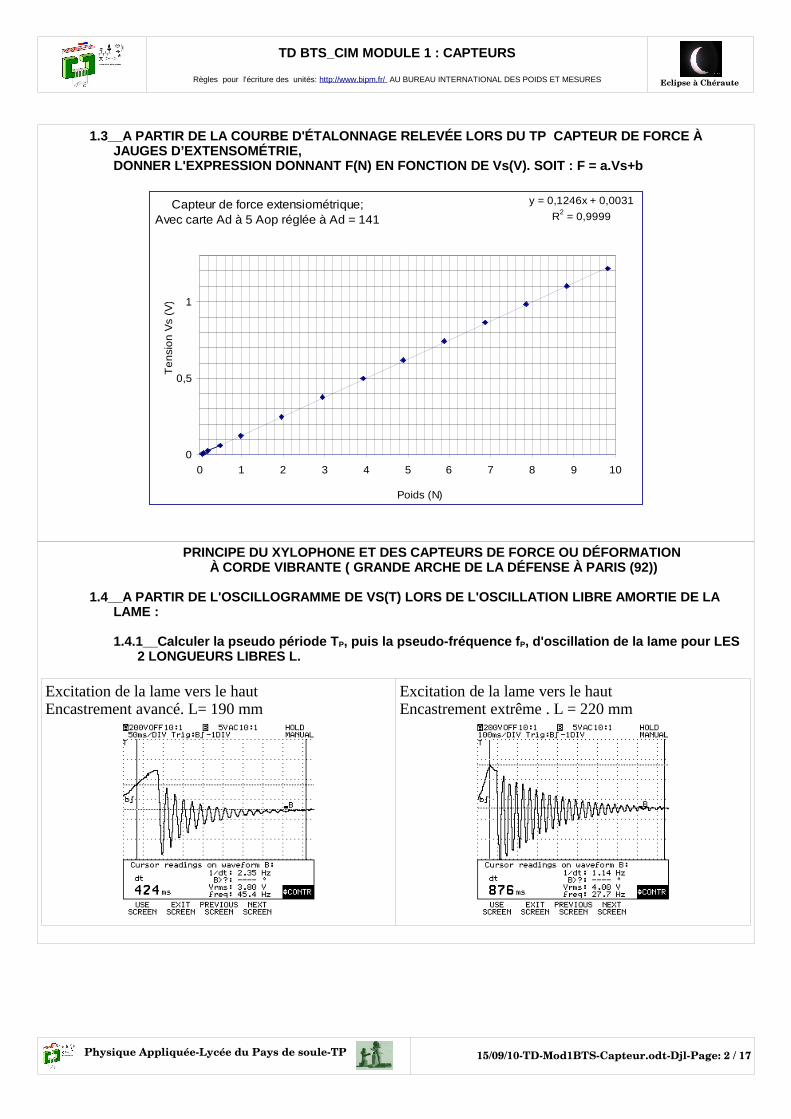
2__EXERCICE:CAPTEUR DE TEMPÉRATURE À CTN (TP)
R
10 Ohms22W
Alimentation réglée en Si
Mal
UalVr
Alimentation
Ual-o = Ual-vid
Io(al) = Icc(al)
A K IalB
Alimentation ouGBF en DC
Ucond vid = 5 VVctn
Ucond
CTN 1 KOhms
Mcond
Rcond
Ictn
C D
La CTN (pour thermistance à Coefficient de Température Négatif ) est une Philips(BC) components, de référence 640-63102 et de résistance à température standard (25°C) ; R25 = 1K.
Rcond = 1K (Choisie pour limiter l’échauffement de la CTN par effet joule et pour obtenir une sensibilité suffisante dVCTN / VCTN )
Ual-o = 7V(Tension à vide de l'alimentation) ; Ial-o (IccAlimentation) = 0.60 A ;
R = 10 : Choisit tel que R < Ual-o/ Ial-o pour un fonctionnement en Gi .
2.1. Identifier le conditionneur du capteur, l'élément de transduction, le mesurande , la réaction du transducteur, et la grandeur de sortie . Faire un schéma bloc unifilaire, avec grandeurs et unités .
2.2. Exprimer :VCTN ( Ucond , RCTN , Rcond)Rq : Dans le cas où l’on a correctement réglé l’alimentation en générateur de tension
( Gv : RCharge > UvidIcc
) , Ucond ~ Ucondvid = 5 V
2.3.On mesure VCTN (t) au voltmètre ou à l’oscilloscope à mémoire.Montrer que RCTN(t) en fonction de VCTN (t) s’exprime par :
RCTN(t) = RCond [ VCTN(t) / (UCond – VCTN(t) ) ]
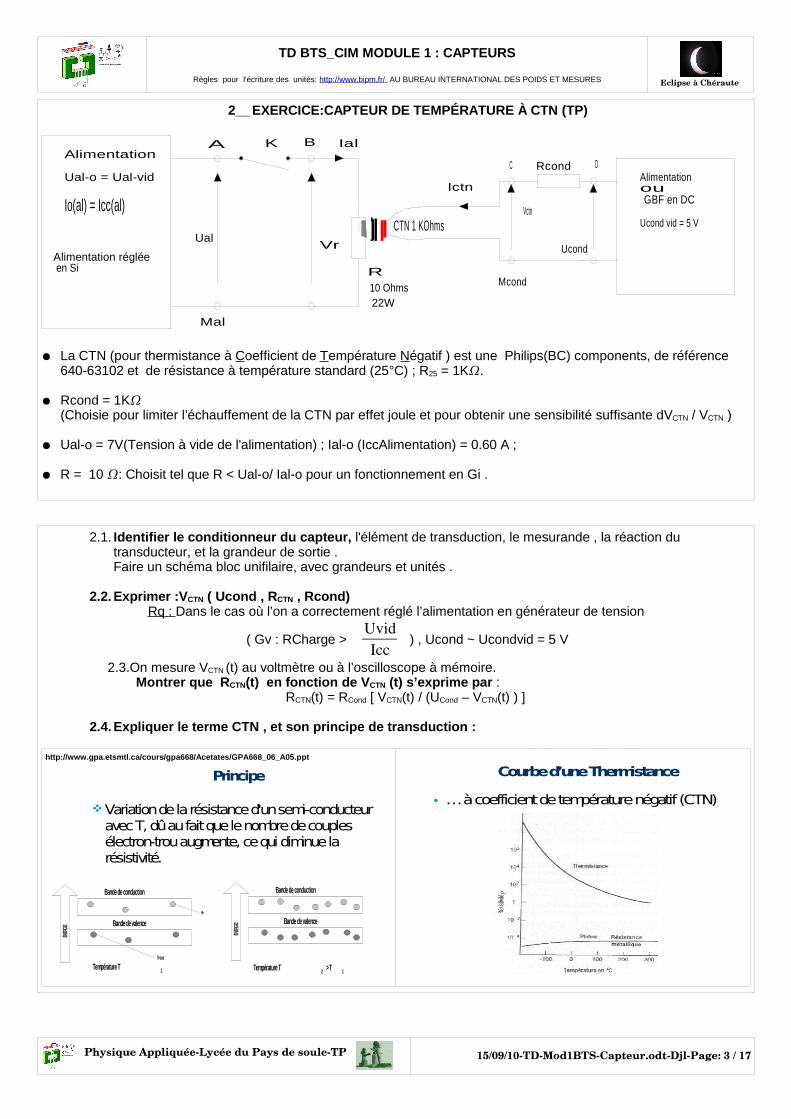
2.4. Expliquer le terme CTN , et son principe de transduction :
http://www.gpa.etsmtl.ca/cours/gpa668/Acetates/GPA668_06_A05.ppt
Principe
Variation de la résistance d'un semi-conducteur avec T, dû au fait que le nombre de couples électron-trou augmente, ce qui diminue la résistivité.
ÉNER
GIE
Bande de conduction
Bande de valence
Trous
e-
Température T 1
ÉNER
GIE
Bande de conduction
Bande de valence
Température T 2 > T 1
• … à coefficient de température négatif (CTN)
Courbe d’une Thermistance
Physique AppliquéeLycée du Pays de souleTP 15/09/10TDMod1BTSCapteur.odtDjlPage: 3 / 17
TD BTS_CIM MODULE 1 : CAPTEURS
Règles pour l'écriture des unités: http://www.bipm.fr/ AU BUREAU INTERNATIONAL DES POIDS ET MESURES Eclipse à Chéraute
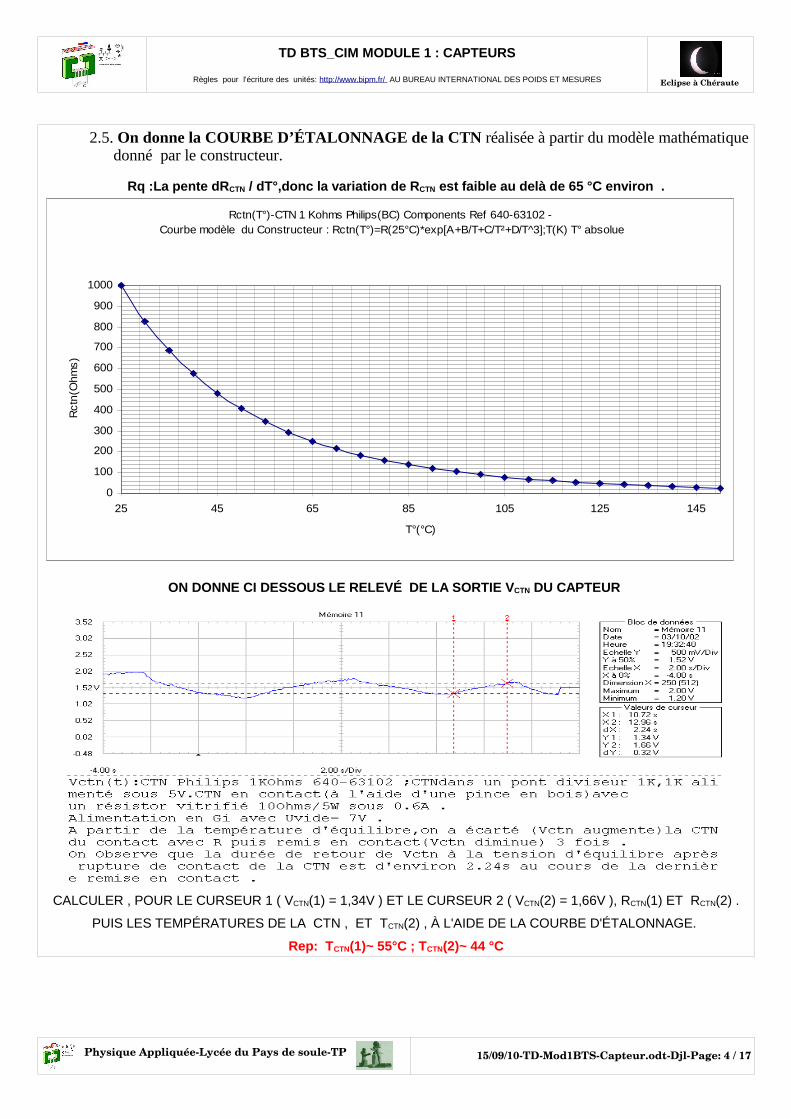
2.5. On donne la COURBE D’ÉTALONNAGE de la CTN réalisée à partir du modèle mathématique donné par le constructeur.
Rq :La pente dRCTN / dT°,donc la variation de RCTN est faible au delà de 65 °C environ .
Rctn(T°)-CTN 1 Kohms Philips(BC) Components Ref 640-63102 - Courbe modèle du Constructeur : Rctn(T°)=R(25°C)*exp[A+B/T+C/T²+D/T^3];T(K) T° absolue
0
100
200
300
400
500
600
700
800
900
1000
25 45 65 85 105 125 145
T°(°C)
Rctn
(Ohm
s)
ON DONNE CI DESSOUS LE RELEVÉ DE LA SORTIE VCTN DU CAPTEUR
CALCULER , POUR LE CURSEUR 1 ( VCTN(1) = 1,34V ) ET LE CURSEUR 2 ( VCTN(2) = 1,66V ), RCTN(1) ET RCTN(2) .
PUIS LES TEMPÉRATURES DE LA CTN , ET TCTN(2) , À L'AIDE DE LA COURBE D'ÉTALONNAGE.
Rep: TCTN(1)~ 55°C ; TCTN(2)~ 44 °C
Physique AppliquéeLycée du Pays de souleTP 15/09/10TDMod1BTSCapteur.odtDjlPage: 4 / 17
TD BTS_CIM MODULE 1 : CAPTEURS
Règles pour l'écriture des unités: http://www.bipm.fr/ AU BUREAU INTERNATIONAL DES POIDS ET MESURES Eclipse à Chéraute
3. CAPTEUR DE VITESSE
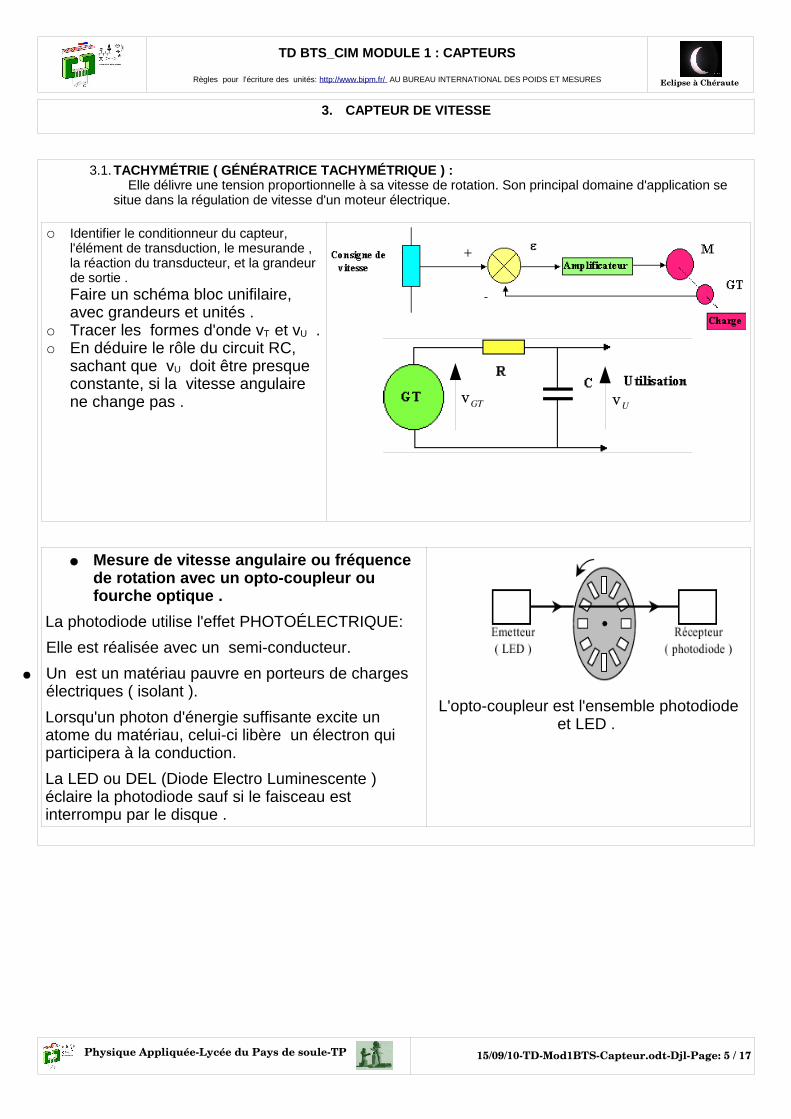
3.1. TACHYMÉTRIE ( GÉNÉRATRICE TACHYMÉTRIQUE ) : Elle délivre une tension proportionnelle à sa vitesse de rotation. Son principal domaine d'application se situe dans la régulation de vitesse d'un moteur électrique.
Identifier le conditionneur du capteur, l'élément de transduction, le mesurande , la réaction du transducteur, et la grandeur de sortie . Faire un schéma bloc unifilaire, avec grandeurs et unités .
Tracer les formes d'onde vT et vU . En déduire le rôle du circuit RC,
sachant que vU doit être presque constante, si la vitesse angulaire ne change pas . vGT vU
Mesure de vitesse angulaire ou fréquence de rotation avec un opto-coupleur ou fourche optique .
La photodiode utilise l'effet PHOTOÉLECTRIQUE:
Elle est réalisée avec un semi-conducteur.
Un est un matériau pauvre en porteurs de charges électriques ( isolant ).
Lorsqu'un photon d'énergie suffisante excite un atome du matériau, celui-ci libère un électron qui participera à la conduction.
La LED ou DEL (Diode Electro Luminescente ) éclaire la photodiode sauf si le faisceau est interrompu par le disque .
L'opto-coupleur est l'ensemble photodiode et LED .
Physique AppliquéeLycée du Pays de souleTP 15/09/10TDMod1BTSCapteur.odtDjlPage: 5 / 17
TD BTS_CIM MODULE 1 : CAPTEURS
Règles pour l'écriture des unités: http://www.bipm.fr/ AU BUREAU INTERNATIONAL DES POIDS ET MESURES Eclipse à Chéraute
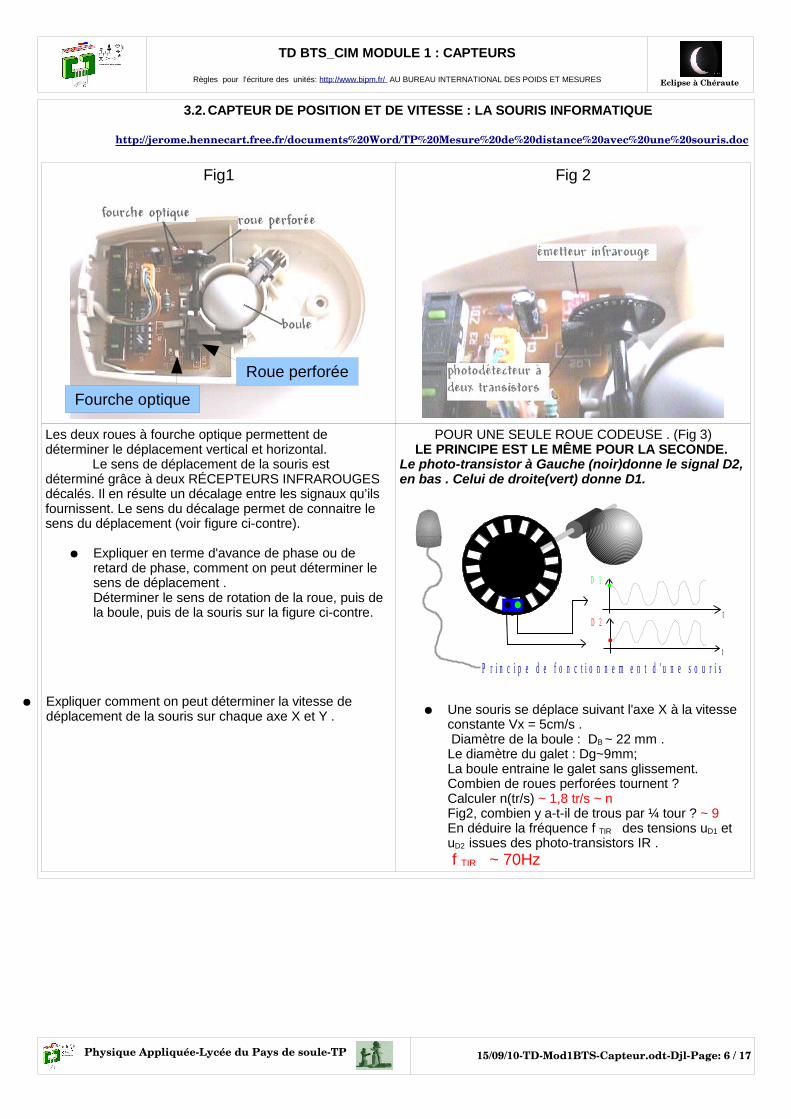
3.2. CAPTEUR DE POSITION ET DE VITESSE : LA SOURIS INFORMATIQUE
http://jerome.hennecart.free.fr/documents%20Word/TP%20Mesure%20de%20distance%20avec%20une%20souris.doc
Fig1 Fig 2
Les deux roues à fourche optique permettent de déterminer le déplacement vertical et horizontal.
Le sens de déplacement de la souris est déterminé grâce à deux RÉCEPTEURS INFRAROUGES décalés. Il en résulte un décalage entre les signaux qu’ils fournissent. Le sens du décalage permet de connaitre le sens du déplacement (voir figure ci-contre).
Expliquer en terme d'avance de phase ou de retard de phase, comment on peut déterminer le sens de déplacement . Déterminer le sens de rotation de la roue, puis de la boule, puis de la souris sur la figure ci-contre.
Expliquer comment on peut déterminer la vitesse de déplacement de la souris sur chaque axe X et Y .
POUR UNE SEULE ROUE CODEUSE . (Fig 3)LE PRINCIPE EST LE MÊME POUR LA SECONDE.
Le photo-transistor à Gauche (noir)donne le signal D2, en bas . Celui de droite(vert) donne D1.
P r i n c i p e d e f o n c t i o n n e m e n t d ' u n e s o u r i s
t
t
D 1
D 2
Une souris se déplace suivant l'axe X à la vitesse constante Vx = 5cm/s . Diamètre de la boule : DB ~ 22 mm . Le diamètre du galet : Dg~9mm; La boule entraine le galet sans glissement.Combien de roues perforées tournent ? Calculer n(tr/s) ~ 1,8 tr/s ~ nFig2, combien y a-t-il de trous par ¼ tour ? ~ 9En déduire la fréquence f TIR des tensions uD1 et uD2 issues des photo-transistors IR . f TIR ~ 70Hz
Physique AppliquéeLycée du Pays de souleTP 15/09/10TDMod1BTSCapteur.odtDjlPage: 6 / 17
Roue perforée
Fourche optique
TD BTS_CIM MODULE 1 : CAPTEURS
Règles pour l'écriture des unités: http://www.bipm.fr/ AU BUREAU INTERNATIONAL DES POIDS ET MESURES Eclipse à Chéraute
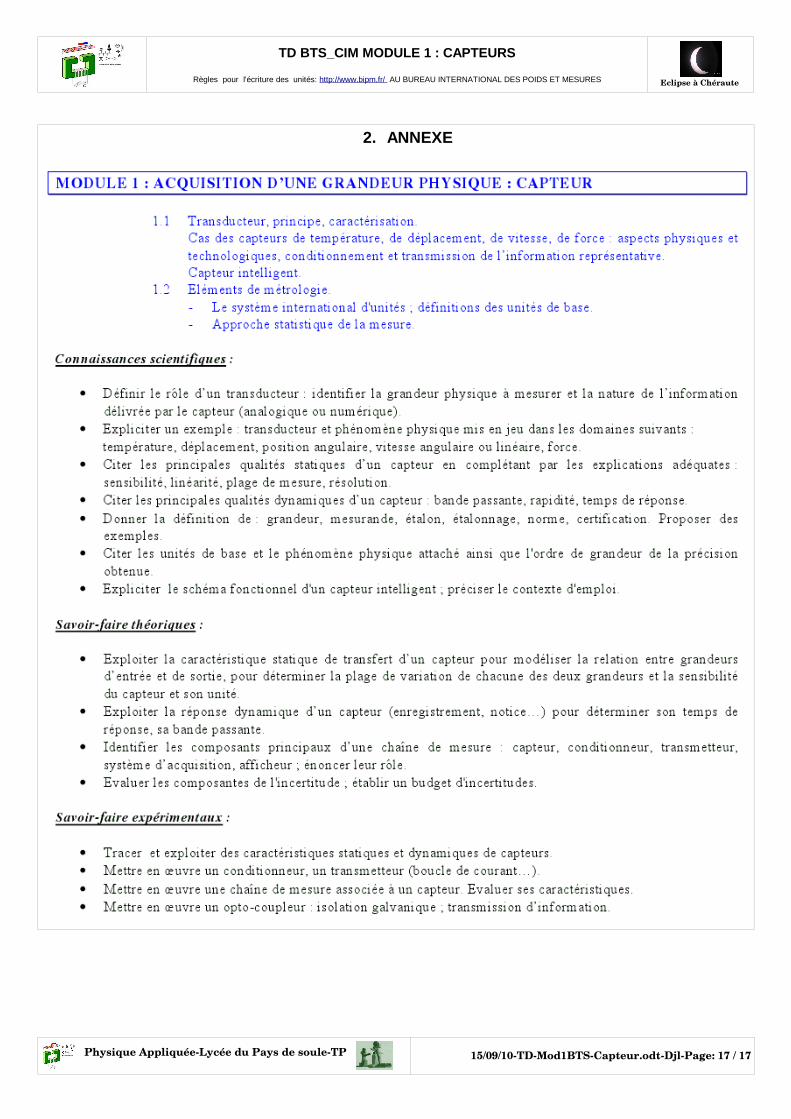
4. ÉLÉMENTS DE MÉTROLOGIE:
4.1. CARACTÉRISTIQUES STATIQUES ET DYNAMIQUES DES CAPTEURShttp://pagesperso-orange.fr/michel.hubin/capteurs/metro/chap_met3.htm
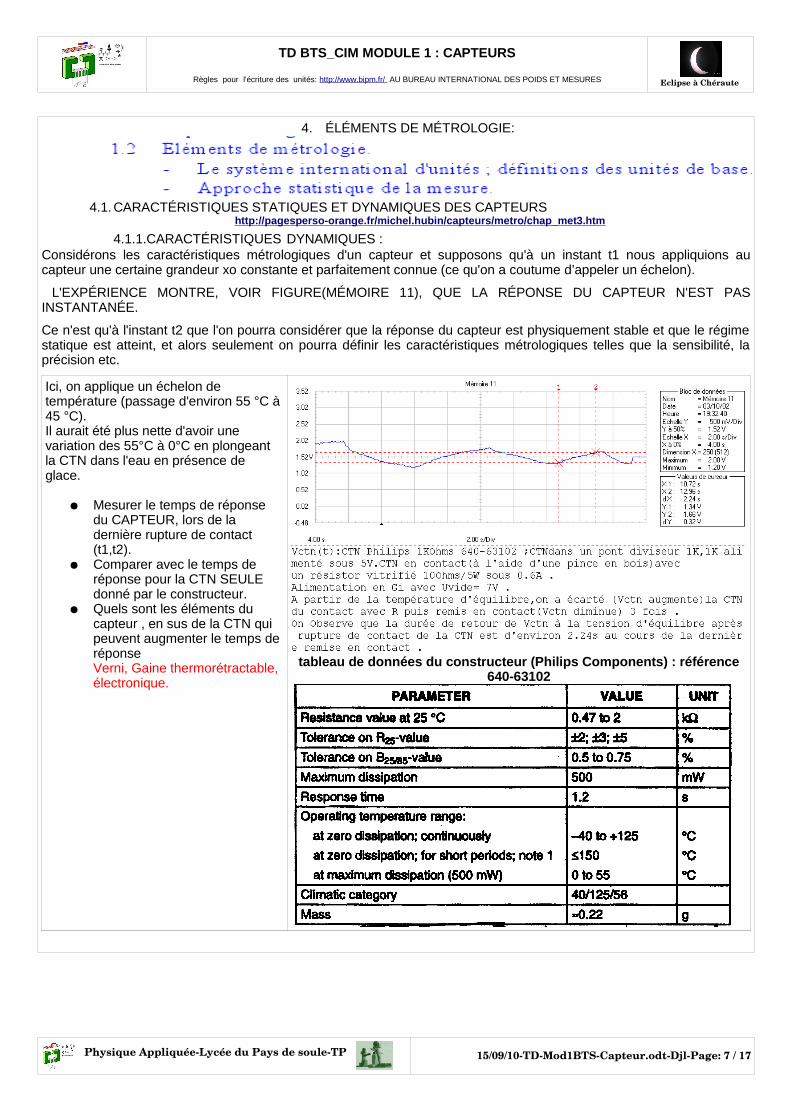
4.1.1.CARACTÉRISTIQUES DYNAMIQUES : Considérons les caractéristiques métrologiques d'un capteur et supposons qu'à un instant t1 nous appliquions au capteur une certaine grandeur xo constante et parfaitement connue (ce qu'on a coutume d’appeler un échelon).
L'EXPÉRIENCE MONTRE, VOIR FIGURE(MÉMOIRE 11), QUE LA RÉPONSE DU CAPTEUR N'EST PAS INSTANTANÉE.
Ce n'est qu'à l'instant t2 que l'on pourra considérer que la réponse du capteur est physiquement stable et que le régime statique est atteint, et alors seulement on pourra définir les caractéristiques métrologiques telles que la sensibilité, la précision etc.
Ici, on applique un échelon de température (passage d'environ 55 °C à45 °C). Il aurait été plus nette d'avoir une variation des 55°C à 0°C en plongeant la CTN dans l'eau en présence de glace.
Mesurer le temps de réponse du CAPTEUR, lors de la dernière rupture de contact (t1,t2).
Comparer avec le temps de réponse pour la CTN SEULE donné par le constructeur.
Quels sont les éléments du capteur , en sus de la CTN qui peuvent augmenter le temps de réponse Verni, Gaine thermorétractable,électronique.
tableau de données du constructeur (Philips Components) : référence 640-63102
Physique AppliquéeLycée du Pays de souleTP 15/09/10TDMod1BTSCapteur.odtDjlPage: 7 / 17
TD BTS_CIM MODULE 1 : CAPTEURS
Règles pour l'écriture des unités: http://www.bipm.fr/ AU BUREAU INTERNATIONAL DES POIDS ET MESURES Eclipse à Chéraute
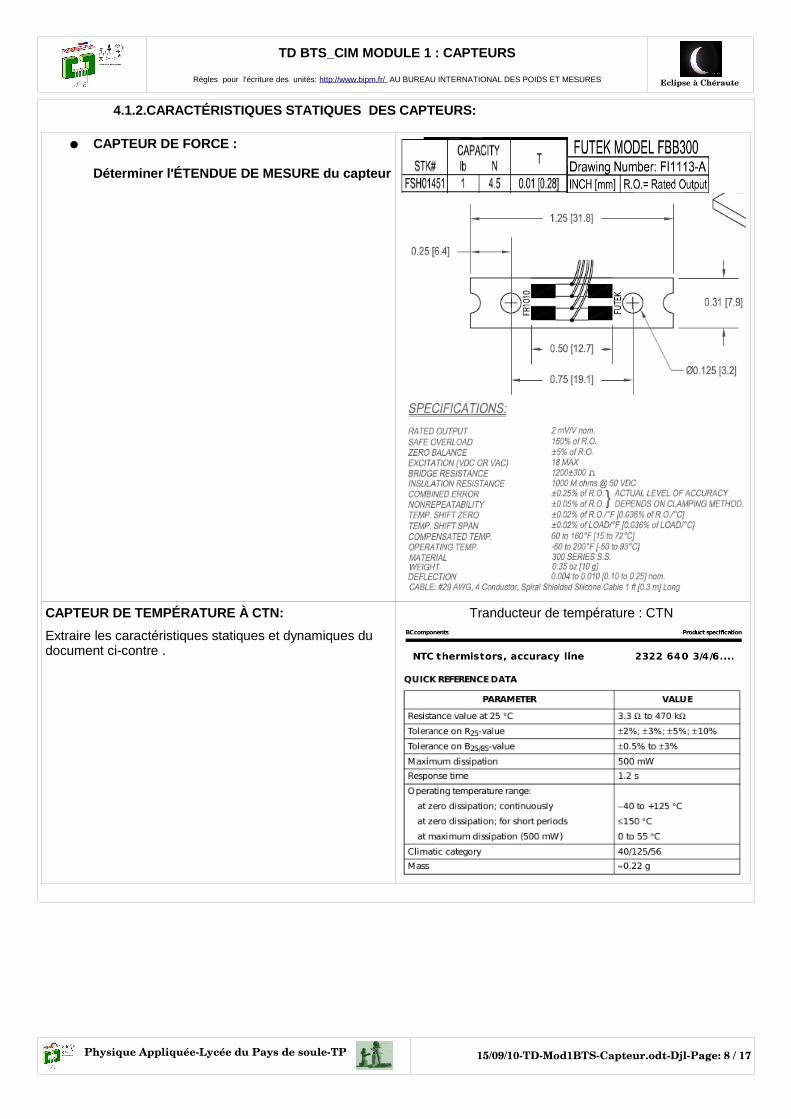
4.1.2.CARACTÉRISTIQUES STATIQUES DES CAPTEURS:
CAPTEUR DE FORCE :
Déterminer l'ÉTENDUE DE MESURE du capteur
CAPTEUR DE TEMPÉRATURE À CTN:
Extraire les caractéristiques statiques et dynamiques du document ci-contre .
Tranducteur de température : CTN
Physique AppliquéeLycée du Pays de souleTP 15/09/10TDMod1BTSCapteur.odtDjlPage: 8 / 17
TD BTS_CIM MODULE 1 : CAPTEURS
Règles pour l'écriture des unités: http://www.bipm.fr/ AU BUREAU INTERNATIONAL DES POIDS ET MESURES Eclipse à Chéraute
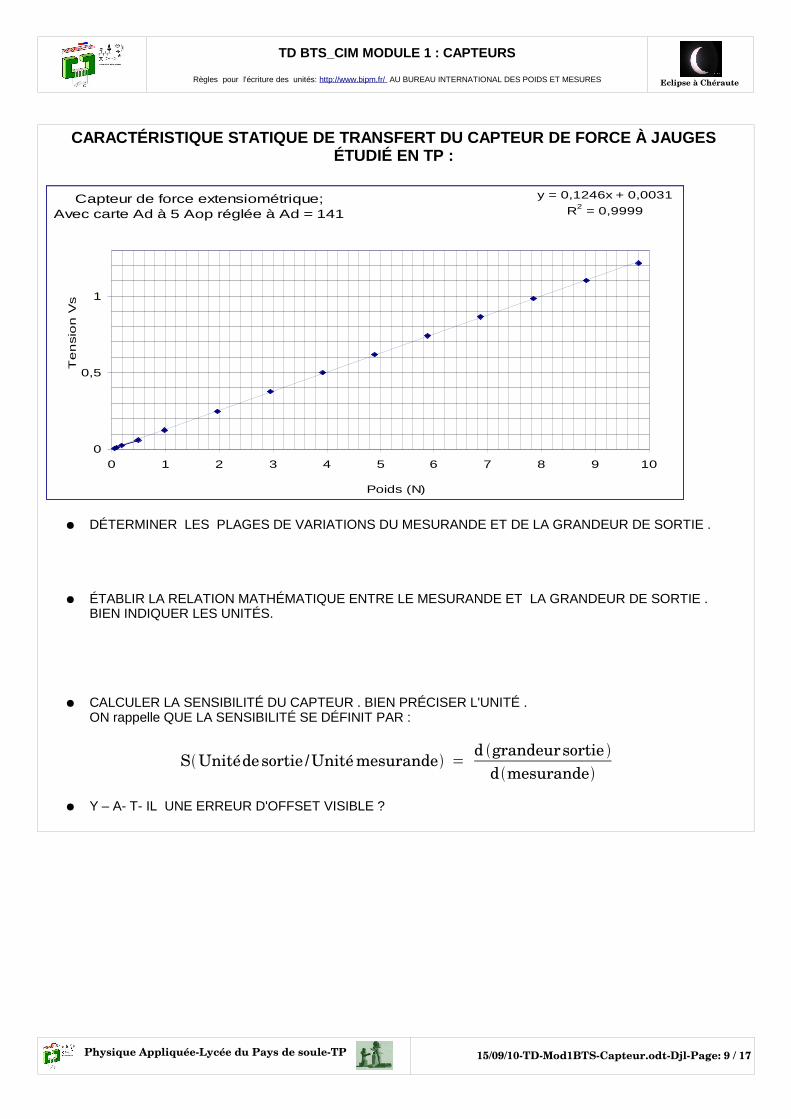
CARACTÉRISTIQUE STATIQUE DE TRANSFERT DU CAPTEUR DE FORCE À JAUGES ÉTUDIÉ EN TP :
Capteur de force extensiométrique; Avec carte Ad à 5 Aop réglée à Ad = 141
y = 0,1246x + 0,0031
R2 = 0,9999
0
0,5
1
0 1 2 3 4 5 6 7 8 9 10
Poids (N)
Te
nsio
n V
s (
V)
DÉTERMINER LES PLAGES DE VARIATIONS DU MESURANDE ET DE LA GRANDEUR DE SORTIE .
ÉTABLIR LA RELATION MATHÉMATIQUE ENTRE LE MESURANDE ET LA GRANDEUR DE SORTIE .BIEN INDIQUER LES UNITÉS.
CALCULER LA SENSIBILITÉ DU CAPTEUR . BIEN PRÉCISER L'UNITÉ . ON rappelle QUE LA SENSIBILITÉ SE DÉFINIT PAR :
SUnitédesortie /Unité mesurande =d grandeursortie
dmesurande
Y – A- T- IL UNE ERREUR D'OFFSET VISIBLE ?
Physique AppliquéeLycée du Pays de souleTP 15/09/10TDMod1BTSCapteur.odtDjlPage: 9 / 17
TD BTS_CIM MODULE 1 : CAPTEURS
Règles pour l'écriture des unités: http://www.bipm.fr/ AU BUREAU INTERNATIONAL DES POIDS ET MESURES Eclipse à Chéraute
5. ERREURS ET INCERTITUDES DE MESURES :
5.1. ON DONNE LES DISTRIBUTIONS DE RINDUIT RÉSUMÉES CI-DESSOUS :
5.1.6.Faire la liste des causes systématiques d’erreurs de Mesure pour le capteur de force à jauges
5.1.7.Indiquer des moyens de les corriger .
5.1.8.Dresser la liste des causes d’incertitudes de mesures .
5.1.9.Faire de même pour la mesure de rinduit par la méthode du rotor calé pour les petits moteurs à courant continu .Après avoir RAPPELÉ SUCCINTEMENT LA MÉTHODE DE MESURE DE LA RÉSISTANCE D'INDUIT D'UN MOTEUR À COURANT CONTINU PAR LA MÉTHODE DU ROTOR CALÉ .
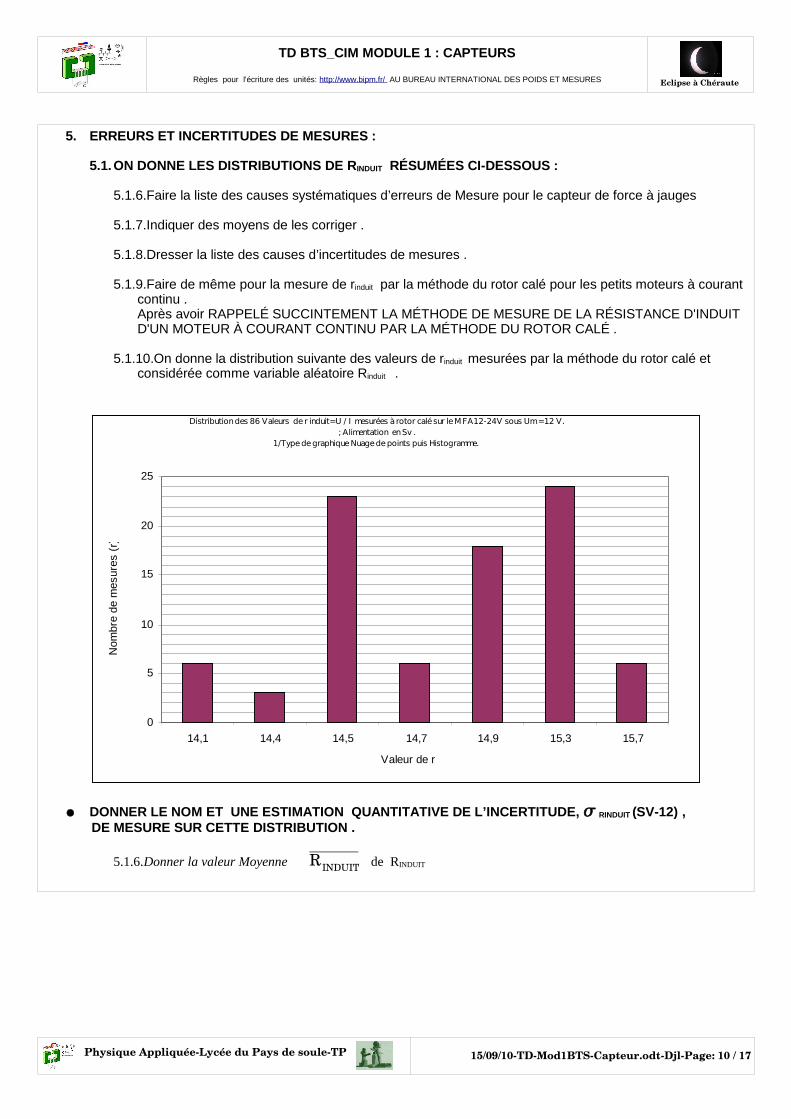
5.1.10.On donne la distribution suivante des valeurs de rinduit mesurées par la méthode du rotor calé et considérée comme variable aléatoire Rinduit .
0
5
10
15
20
25
14,1 14,4 14,5 14,7 14,9 15,3 15,7
Valeur de r
Nom
bre
de m
esur
es (
r)
Distribution des 86 Valeurs de r induit= U / I mesurées à rotor calé sur le MFA12-24V sous Um = 12 V. ; Alimentation en Sv .
1/Type de graphique Nuage de points puis Histogramme.
DONNER LE NOM ET UNE ESTIMATION QUANTITATIVE DE L’INCERTITUDE, RINDUIT (SV-12) , DE MESURE SUR CETTE DISTRIBUTION .
5.1.6.Donner la valeur Moyenne R INDUIT de RINDUIT
Physique AppliquéeLycée du Pays de souleTP 15/09/10TDMod1BTSCapteur.odtDjlPage: 10 / 17
TD BTS_CIM MODULE 1 : CAPTEURS
Règles pour l'écriture des unités: http://www.bipm.fr/ AU BUREAU INTERNATIONAL DES POIDS ET MESURES Eclipse à Chéraute
5.2. ON DONNE LES DISTRIBUTIONS DE RINDUIT RÉSUMÉES CI-DESSOUS :
0
5
10
15
20
25
10,0
11,0
12,0
13,0
14,0
15,0
16,0
17,0
18,0
19,0
20,0
Valeurs de r(Ohms)
Nom
bre
de m
esure
s p
our chaque v
ale
ur r N
b(r
)
U/I pour Sv:U=12V
U/I pour Sv:U=24V
U/I pour Si:U=12V
U/I pour Si:U=24V
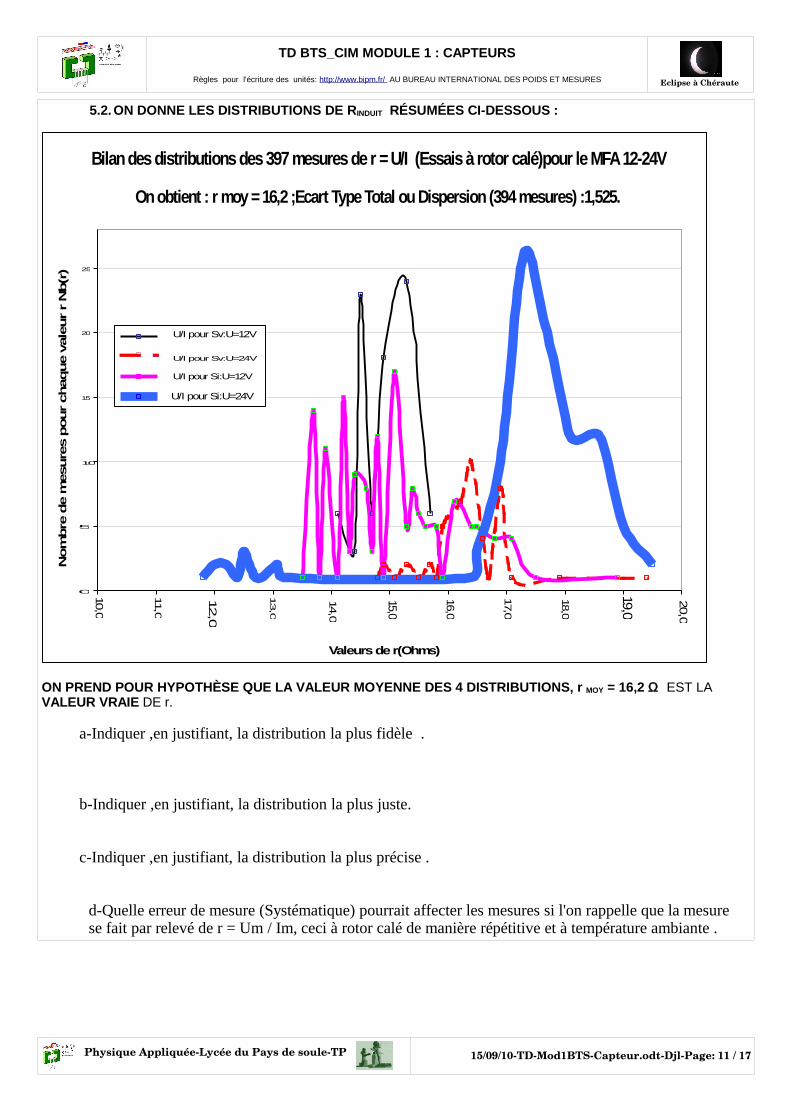
Bilan des distributions des 397 mesures de r = U/I (Essais à rotor calé)pour le MFA 12-24V
On obtient : r moy = 16,2 ;Ecart Type Total ou Dispersion (394 mesures) :1,525.
ON PREND POUR HYPOTHÈSE QUE LA VALEUR MOYENNE DES 4 DISTRIBUTIONS, r MOY = 16,2 Ω EST LA VALEUR VRAIE DE r.
a-Indiquer ,en justifiant, la distribution la plus fidèle .
b-Indiquer ,en justifiant, la distribution la plus juste.
c-Indiquer ,en justifiant, la distribution la plus précise .
d-Quelle erreur de mesure (Systématique) pourrait affecter les mesures si l'on rappelle que la mesure se fait par relevé de r = Um / Im, ceci à rotor calé de manière répétitive et à température ambiante .
Physique AppliquéeLycée du Pays de souleTP 15/09/10TDMod1BTSCapteur.odtDjlPage: 11 / 17
TD BTS_CIM MODULE 1 : CAPTEURS
Règles pour l'écriture des unités: http://www.bipm.fr/ AU BUREAU INTERNATIONAL DES POIDS ET MESURES Eclipse à Chéraute
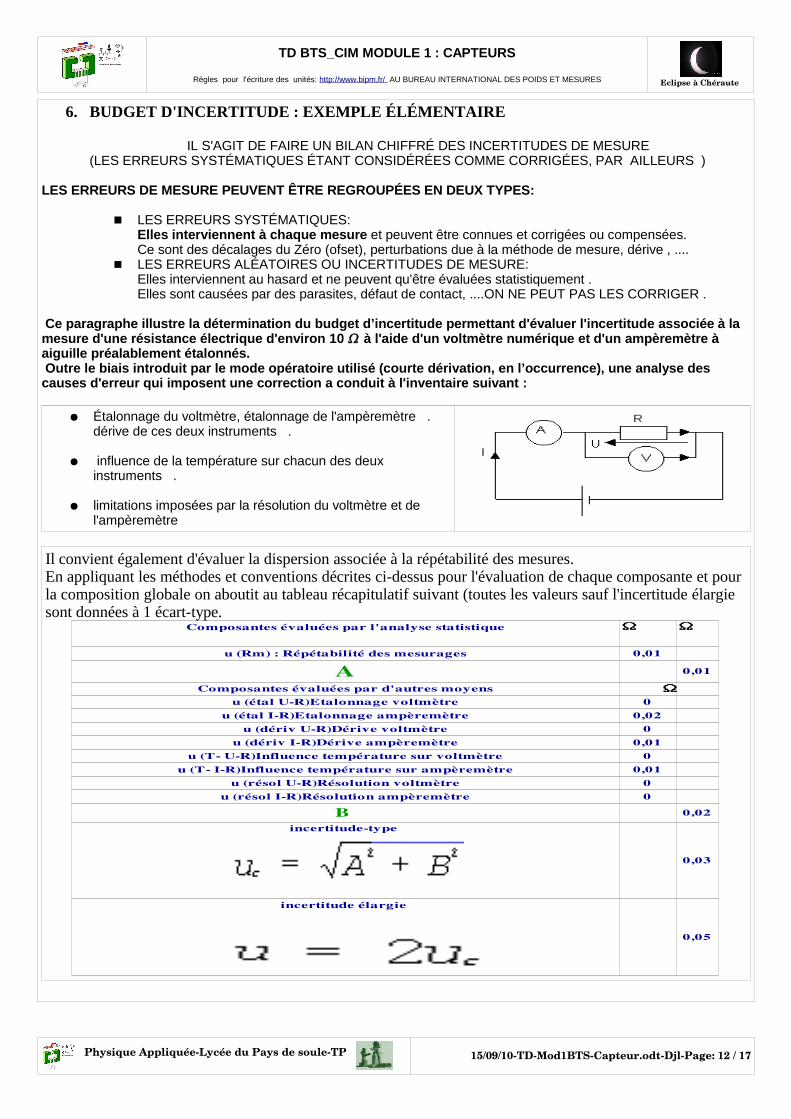
6. BUDGET D'INCERTITUDE : EXEMPLE ÉLÉMENTAIRE
IL S'AGIT DE FAIRE UN BILAN CHIFFRÉ DES INCERTITUDES DE MESURE (LES ERREURS SYSTÉMATIQUES ÉTANT CONSIDÉRÉES COMME CORRIGÉES, PAR AILLEURS )
LES ERREURS DE MESURE PEUVENT ÊTRE REGROUPÉES EN DEUX TYPES:
LES ERREURS SYSTÉMATIQUES:Elles interviennent à chaque mesure et peuvent être connues et corrigées ou compensées. Ce sont des décalages du Zéro (ofset), perturbations due à la méthode de mesure, dérive , ....
LES ERREURS ALÉATOIRES OU INCERTITUDES DE MESURE:Elles interviennent au hasard et ne peuvent qu'être évaluées statistiquement . Elles sont causées par des parasites, défaut de contact, ....ON NE PEUT PAS LES CORRIGER .
Ce paragraphe illustre la détermination du budget d’incertitude permettant d'évaluer l'incertitude associée à la mesure d'une résistance électrique d'environ 10 à l'aide d'un voltmètre numérique et d'un ampèremètre à aiguille préalablement étalonnés. Outre le biais introduit par le mode opératoire utilisé (courte dérivation, en l’occurrence), une analyse des causes d'erreur qui imposent une correction a conduit à l'inventaire suivant :
Étalonnage du voltmètre, étalonnage de l'ampèremètre .dérive de ces deux instruments .
influence de la température sur chacun des deux instruments .
limitations imposées par la résolution du voltmètre et de l'ampèremètre
Il convient également d'évaluer la dispersion associée à la répétabilité des mesures. En appliquant les méthodes et conventions décrites ci-dessus pour l'évaluation de chaque composante et pour la composition globale on aboutit au tableau récapitulatif suivant (toutes les valeurs sauf l'incertitude élargie sont données à 1 écart-type.
0,01
A 0,01
Composantes évaluées par d'autres moyens0
0,020
0,010
0,0100
0,02
0,03
0,05
Composantes évaluées par l'analyse statistique
u (Rm) : Répétabilité des mesurages
u (étal UR)Etalonnage voltmètreu (étal IR)Etalonnage ampèremètre
u (dériv UR)Dérive voltmètreu (dériv IR)Dérive ampèremètre
u (T UR)Influence température sur voltmètreu (T IR)Influence température sur ampèremètre
u (résol UR)Résolution voltmètreu (résol IR)Résolution ampèremètre
B incertitudetype
incertitude élargie
Physique AppliquéeLycée du Pays de souleTP 15/09/10TDMod1BTSCapteur.odtDjlPage: 12 / 17
TD BTS_CIM MODULE 1 : CAPTEURS
Règles pour l'écriture des unités: http://www.bipm.fr/ AU BUREAU INTERNATIONAL DES POIDS ET MESURES Eclipse à Chéraute
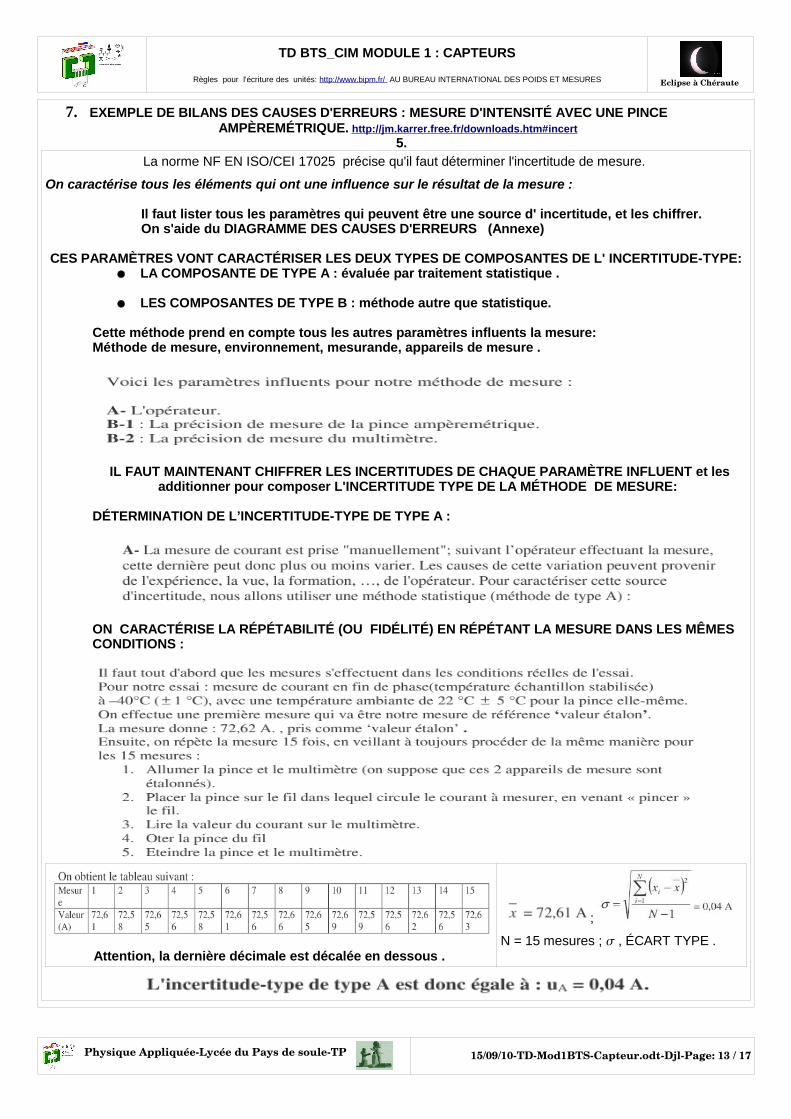
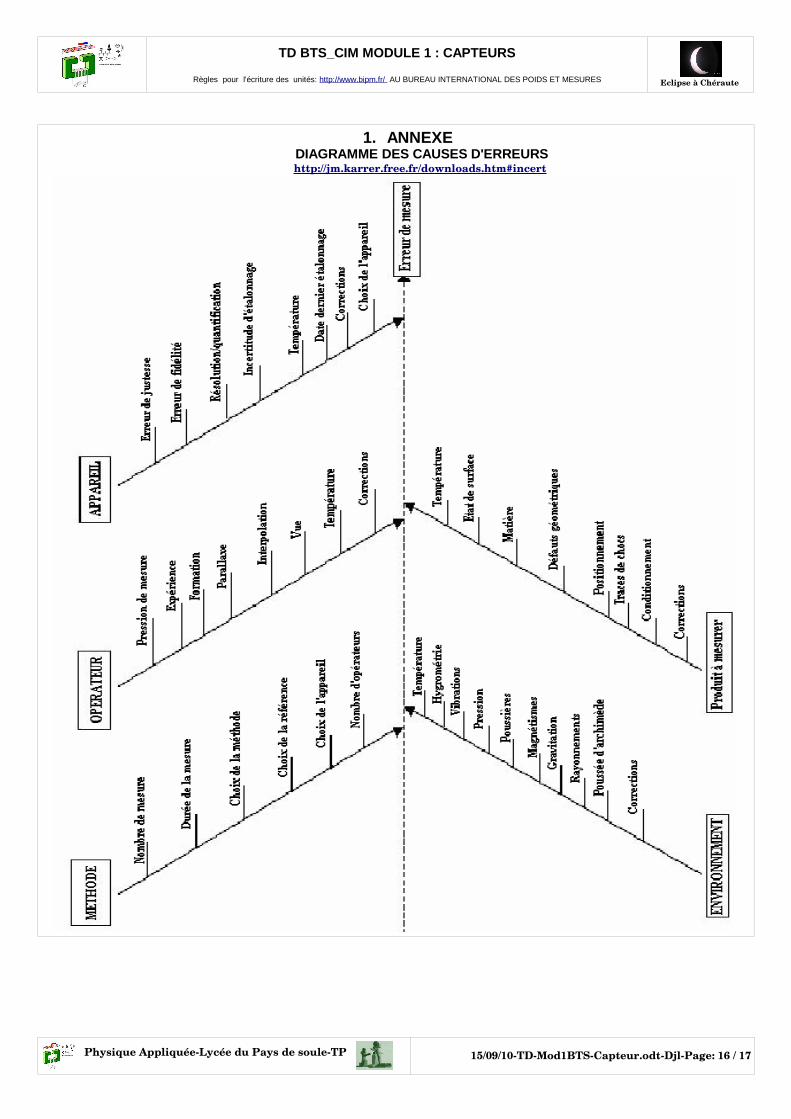
7. EXEMPLE DE BILANS DES CAUSES D'ERREURS : MESURE D'INTENSITÉ AVEC UNE PINCE AMPÈREMÉTRIQUE. http://jm.karrer.free.fr/downloads.htm#incert
5.La norme NF EN ISO/CEI 17025 précise qu'il faut déterminer l'incertitude de mesure.
On caractérise tous les éléments qui ont une influence sur le résultat de la mesure :
Il faut lister tous les paramètres qui peuvent être une source d' incertitude, et les chiffrer.On s'aide du DIAGRAMME DES CAUSES D'ERREURS (Annexe)
CES PARAMÈTRES VONT CARACTÉRISER LES DEUX TYPES DE COMPOSANTES DE L' INCERTITUDE-TYPE: LA COMPOSANTE DE TYPE A : évaluée par traitement statistique .
LES COMPOSANTES DE TYPE B : méthode autre que statistique.
Cette méthode prend en compte tous les autres paramètres influents la mesure:Méthode de mesure, environnement, mesurande, appareils de mesure .
IL FAUT MAINTENANT CHIFFRER LES INCERTITUDES DE CHAQUE PARAMÈTRE INFLUENT et les additionner pour composer L'INCERTITUDE TYPE DE LA MÉTHODE DE MESURE:
DÉTERMINATION DE L’INCERTITUDE-TYPE DE TYPE A :
ON CARACTÉRISE LA RÉPÉTABILITÉ (OU FIDÉLITÉ) EN RÉPÉTANT LA MESURE DANS LES MÊMES CONDITIONS :
Attention, la dernière décimale est décalée en dessous .
;
N = 15 mesures ; , ÉCART TYPE .
Physique AppliquéeLycée du Pays de souleTP 15/09/10TDMod1BTSCapteur.odtDjlPage: 13 / 17
TD BTS_CIM MODULE 1 : CAPTEURS
Règles pour l'écriture des unités: http://www.bipm.fr/ AU BUREAU INTERNATIONAL DES POIDS ET MESURES Eclipse à Chéraute
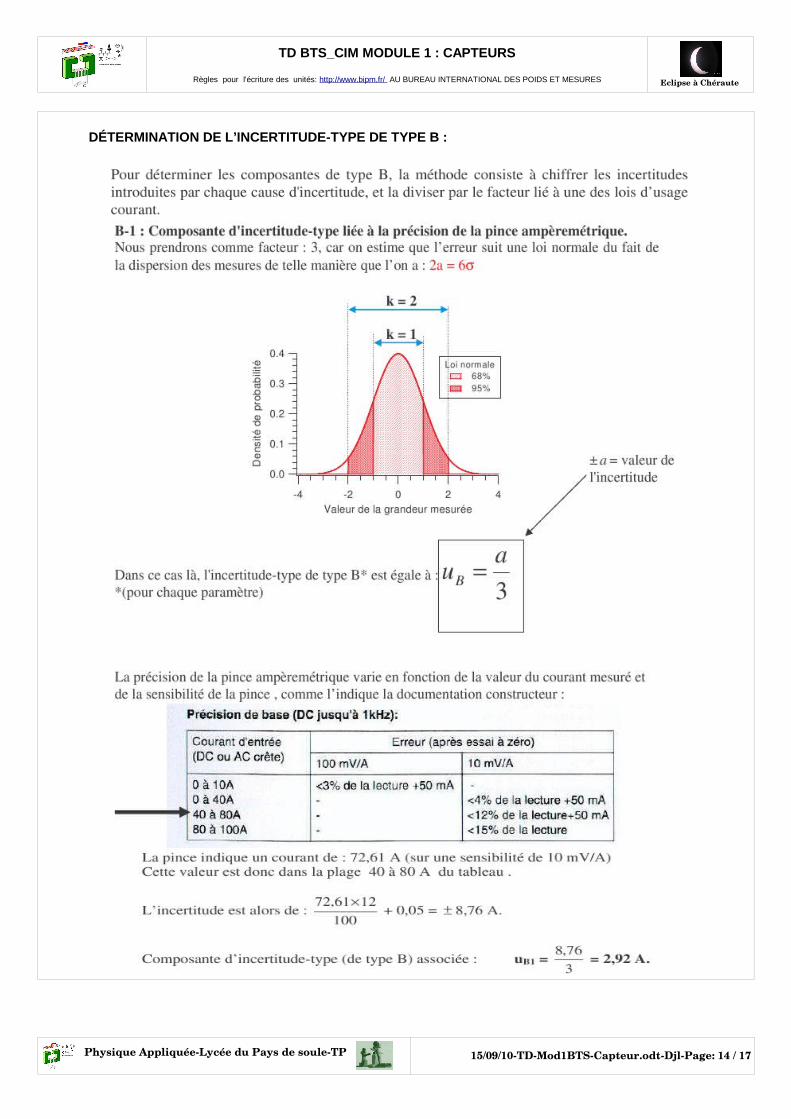
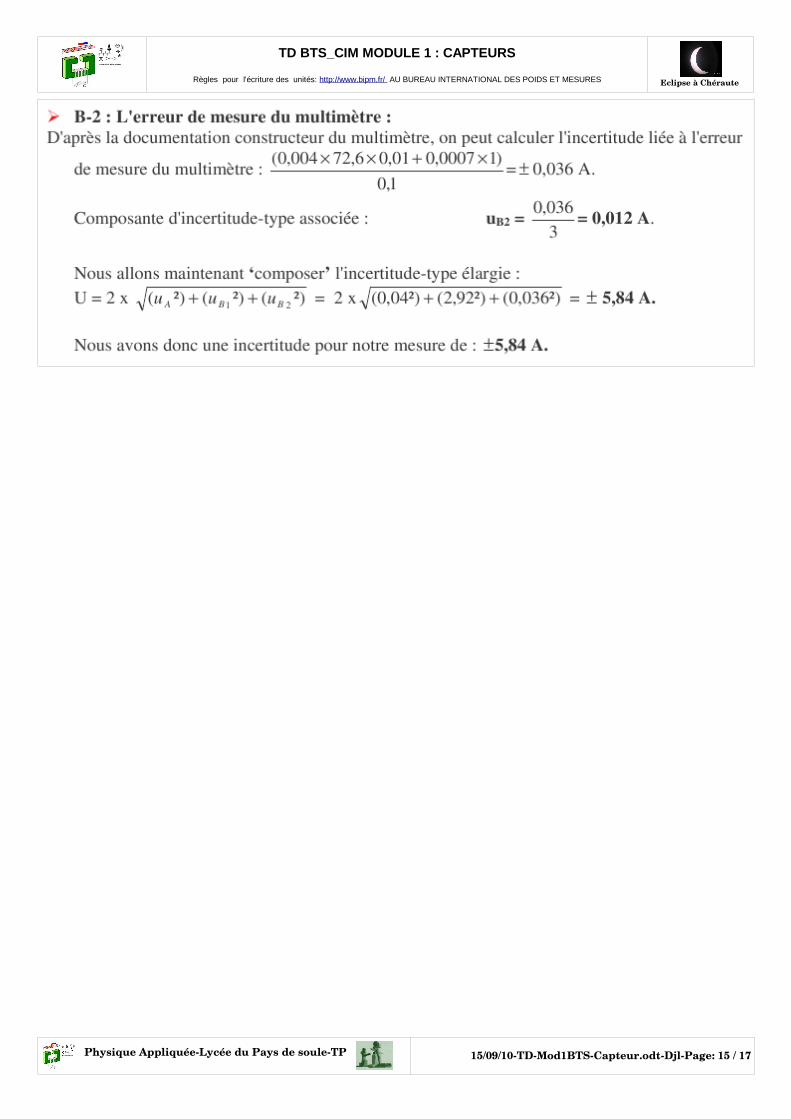
DÉTERMINATION DE L’INCERTITUDE-TYPE DE TYPE B :
Physique AppliquéeLycée du Pays de souleTP 15/09/10TDMod1BTSCapteur.odtDjlPage: 14 / 17
TD BTS_CIM MODULE 1 : CAPTEURS
Règles pour l'écriture des unités: http://www.bipm.fr/ AU BUREAU INTERNATIONAL DES POIDS ET MESURES Eclipse à Chéraute
Physique AppliquéeLycée du Pays de souleTP 15/09/10TDMod1BTSCapteur.odtDjlPage: 15 / 17
TD BTS_CIM MODULE 1 : CAPTEURS
Règles pour l'écriture des unités: http://www.bipm.fr/ AU BUREAU INTERNATIONAL DES POIDS ET MESURES Eclipse à Chéraute
1. ANNEXE DIAGRAMME DES CAUSES D'ERREURShttp://jm.karrer.free.fr/downloads.htm#incert
Physique AppliquéeLycée du Pays de souleTP 15/09/10TDMod1BTSCapteur.odtDjlPage: 16 / 17
TD BTS_CIM MODULE 1 : CAPTEURS
Règles pour l'écriture des unités: http://www.bipm.fr/ AU BUREAU INTERNATIONAL DES POIDS ET MESURES Eclipse à Chéraute
2. ANNEXE
Physique AppliquéeLycée du Pays de souleTP 15/09/10TDMod1BTSCapteur.odtDjlPage: 17 / 17