Embed Size (px)
Citation preview
![Page 1: LOI DE COULOMB Liaisons imparfaites et pertes internes et TD par centres_d... · rapport au solide [2] ... condition limite entre adhérence et frottement. ... Les systèmes ABS et](https://reader039.pdfslide.fr/reader039/viewer/2022031019/5b9ca01009d3f2f6368ce887/html5/page/1.jpg)
CI20 Cinématique et actions mécaniques dans les systèmes CI23 dynamique par le théorème énergie / puissance
JC ROLIN 1 Lycée G Eiffel / Dijon
LOI DE COULOMB Liaisons imparfaites et pertes internes
Contenu 1 TORSEURS DES LIAISONS ET INTRODUCTION DES FROTTEMENTS ............................ 2
1.1 DESCRIPTION D’UNE LIAISON PARFAITE PAR SES TORSEURS ........................................................................................................ 2 1.2 SCHEMA CINEMATIQUE, SCHEMA D’ARCHITECTURE ET LOCALISATION DES PERTES .......................................................................... 2 1.3 ILLUSTRATION DES PERTES : TRIBOLOGIE (DU GREC ΤΡΙΒΟΣ, « FROTTEMENT » ET ΛΟΓΟΣ, « SCIENCE ») .......................................... 2 1.4 INTRODUCTION DU FROTTEMENT DANS UN TORSEUR DE CONTACT PONCTUEL ............................................................................... 3
2 MODELISATION DU FROTTEMENT ET DE L’ADHERENCE ........................................... 3
2.1 CONTACT ADHERENT (COMPOSANTE TANGENTIELLE AVEC ABSENCE DE FROTTEMENT) .................................................................... 3 2.2 CONTACT AVEC FROTTEMENT, LOI DE COULOMB (2 PIECES GLISSENT L’UNE CONTRE L’AUTRE) ......................................................... 4 2.3 LOI DE COULOMB POUR L’ADHERENCE (2 PIECES IMMOBILES ENTRE ELLES) .................................................................................. 5 2.4 ARC-BOUTEMENT (« COINCEMENT ») .................................................................................................................................. 5
3 MODELISATION DES ACTIONS LOCALES USUELLES ................................................... 6
3.1 DOMAINES D’APPLICATION................................................................................................................................................. 6 3.2 CAS DE LA PESANTEUR, POIDS ET CENTRE DE GRAVITE .............................................................................................................. 6 3.3 ACTIONS SURFACIQUES DE CONTACT (FLUIDE SOUS PRESSION, OU CONTACT REPARTI) .................................................................... 7 3.4 LIAISON SURFACIQUE AVEC FROTTEMENT, APPLICATION AU FREINAGE ......................................................................................... 7 3.5 COMPLEMENTS ................................................................................................................................................................ 8
WIKIPEDIA : Les premières études empiriques sur les forces de friction sont attribuées à Léonard de Vinci
![Page 2: LOI DE COULOMB Liaisons imparfaites et pertes internes et TD par centres_d... · rapport au solide [2] ... condition limite entre adhérence et frottement. ... Les systèmes ABS et](https://reader039.pdfslide.fr/reader039/viewer/2022031019/5b9ca01009d3f2f6368ce887/html5/page/2.jpg)
CI20 Cinématique et actions mécaniques dans les systèmes CI23 Dynamique par le théorème énergie / puissance
J-C Rolin Page 2 sur 8 TSI Eiffel Dijon
1 TORSEURS DES LIAISONS ET INTRODUCTION DES FROTTEMENTS
1.1 Description d’une liaison parfaite par ses torseurs
Chaque liaison normalisée est décrite :
pour les actions mécaniques par son torseur d’action mécanique (ou statique),
pour la cinématique par son torseur cinématique.
Pour les deux torseurs présenté dans une écriture en colonnes, la résultante est à gauche et le moment est à droite.
Illustration pour une liaison pivot d’axe (𝑨, �� ). Donner les unités des composantes des 2 torseurs.
1.2 Schéma cinématique, schéma d’architecture et localisation des pertes
Un schéma cinématique décrit les liaisons au sein d’un système ayant une (des) possibilité(s) de mouvement(s).
Si une liaison est imparfaite, cela signifie que les zones en contact sont le siège de pertes qui restent à définir. Ses pertes dépendent :
des actions aux contacts (torseur d’AM),
de la vitesse relative des parties en contact (torseur cinématique).
Un calcul particulier, le COMOMENT des deux torseurs (symbole ʘ), permet d’évaluer ces pertes. (parfois noté )
Le comoment est une valeur scalaire égale à la somme des produits scalaires de la résultante d'un torseur par le moment de l'autre. Les deux torseurs doivent être exprimés au même point de réduction.
Schéma cinématique
Le schéma architectural permet notamment de définir les zones de contact du guidage que l'on souhaite étudier.
On pourra ainsi :
quantifier les actions mécaniques au niveau des zones de contact
dimensionner les composants de guidage correspondants (tenue aux efforts et durée de vie).
Schéma architectural
1.3 Illustration des pertes : TRIBOLOGIE (du grec τρίβος, « frottement » et λόγος, « science »)
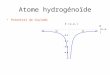
On illustre ci-contre les actions locales au niveau du contact en P entre deux solides repérées 1 et 2 en mouvement relatif.
Le torseur d’action mécanique de contact en P de 1 sur 2 { }21,PT → :
FN est la composante ou action normale sur l’axe �� ,
FT est la composante tangentielle sur l’axe �� (loi de coulomb) qui s’oppose au déplacement.
Le torseur cinématique { }1/2V avec VT la vitesse tangentielle sur l’axe �� .
Le comoment des 2 torseurs se réduit au produit scalaire 𝐹𝑇 . 𝑉𝑇
= − 𝑭𝑻. 𝑽𝑻
Le résultat est négatif ce qui illustre les pertes de cette liaison.
Action locale de contact entre deux solides en déplacement relatif
TRIBOLOGIE : Les frottements apportent plusieurs inconvénients :
usure par adhésion (arrachement de matériaux adhérents l'un à l'autre),
usure par abrasion ou érosion, (les frottements ou chocs, ôtent de la matière en surface),
efforts supplémentaires à fournir pour un même travail. Les frottements sont donc source de gaspillage d'énergie et de matières premières.
![Page 3: LOI DE COULOMB Liaisons imparfaites et pertes internes et TD par centres_d... · rapport au solide [2] ... condition limite entre adhérence et frottement. ... Les systèmes ABS et](https://reader039.pdfslide.fr/reader039/viewer/2022031019/5b9ca01009d3f2f6368ce887/html5/page/3.jpg)
CI20 Cinématique et actions mécaniques dans les systèmes CI23 Dynamique par le théorème énergie / puissance
J-C Rolin Page 3 sur 8 TSI Eiffel Dijon
1.4 Introduction du frottement dans un torseur de contact ponctuel
Soit le contact ponctuel avec frottement de deux solides [1] et [2] au point M, sur le plan tangent Π commun à 1 et 2.
Soit 1/2n le vecteur unitaire de la normale en M au plan
Π, dirigé de [2] vers [1]. L’action de contact de [2] sur [1]
projetée sur la normale 1/2n et sur le plan Π peut
s’écrire :
Le torseur d’action mécanique de cette liaison ponctuelle comporte 2 composantes pour sa résultante.
1/212 n.N →l’effort normal de contact positif pour
qu’il y ait contact,
12T → l’effort tangentiel contenu dans le plan Π.
Contact ponctuel avec frottement
Le torseur cinématique du mouvement du solide [1] par rapport au solide [2] au point M de contact est de la forme :
Avec 1/2,MV vitesse de glissement en M du solide [1]
par rapport au solide [2]. Les lois de Coulomb distinguent deux cas :
0V 1/2,M = (phénomène d’ADHERENCE)
0 V 1/2,M ≠ (phénomène de GLISSEMENT).
Si 0 V 1/2,M ≠ , il y a glissement relatif et l’effort
tangentiel 12T → s’oppose à la vitesse 1/2,MV .
Glissement relatif
2 MODELISATION DU FROTTEMENT ET DE L’ADHERENCE Les liaisons étant considérées imparfaites, il y a lieu de faire intervenir la modélisation du frottement et de trouver la condition limite entre adhérence et frottement. Cette recherche constitue parfois l’objectif principal d’une étude quand il s’agit de :
• dimensionner un frein ↔ opposer un frottement à la vitesse relative pour arrêter un élément mobile,
• dimensionner un limiteur de couple ↔ contrôler la limite d’adhérence pour respecter un critère de sécurité,
• évaluer les pertes ou la puissance interne d’un système ↔ évaluer un rendement (théorème énergie / puissance)
2.1 Contact adhérent (composante tangentielle avec absence de frottement)
Exemple : Voiture (1) sur une route (0) en pente, les roues (2) et (3) étant immobiles (absence de rotation) par rapport à (0)
Le frein à main sur les roues arrière est serré :
les roues avant sont libres,
les roues arrière sont en adhérence.
2.1.1 Contact ponctuel parfait en A
Roue avant libre (absence de frein) Le torseur réduit en A du sol sur la roue 2 est :
L’isolement de la roue (2) montre qu’elle est soumise à 2 forces de même droite support et de sens opposés, le moment en A est donc nul. Roue avant libre : contact sans adhérence
![Page 4: LOI DE COULOMB Liaisons imparfaites et pertes internes et TD par centres_d... · rapport au solide [2] ... condition limite entre adhérence et frottement. ... Les systèmes ABS et](https://reader039.pdfslide.fr/reader039/viewer/2022031019/5b9ca01009d3f2f6368ce887/html5/page/4.jpg)
CI20 Cinématique et actions mécaniques dans les systèmes CI23 Dynamique par le théorème énergie / puissance
J-C Rolin Page 4 sur 8 TSI Eiffel Dijon
2.1.2 Contact adhérent en B
Roue arrière freinée et équilibre du véhicule. On admet le problème plan, on isole l’ensemble S = {1, 2, 3), la voiture est de masse m. Le BAME comporte : Une action à distance (pesanteur) au centre de gravité G (direction, sens et intensité connus).
{ }=1→pes,GT Modélisation
Deux actions de contact en A et B du sol (0) sur les roues (2) et (3)
Action en A de direction connue
{ }=→20,AT
Action en B inconnue
{ }=→20,AT
Application du PFS à l’ensemble S en H :
TRS sur 0x :
TRS sur 0
y :
TMS sur 0z en H :
Graphique des 3 forces concourantes
Conclusion dans le cas d’un contact adhérent :
Le véhicule reste immobile car l’action de contact du sol (0) sur la roue arrière (3) comporte une composante tangentielle X03 qui s’oppose à ce déplacement. On dit qu’il y a adhérence.
2.2 Contact avec frottement, loi de Coulomb (2 pièces glissent l’une contre l’autre)
2.2.1 Contact ponctuel avec frottement en A, roue bloquée glissant sur le sol (verglas par exemple)
La modélisation ci-contre du contact en A entre le sol (0) et la roue (2)
montre un effort normal N 1/2 et un effort tangentiel T 1/2 de sens opposé au
mouvement avec :
• La composante normale 00220 .yYN
• La composante tangentielle0
.0220 xXT
Roue glissant par rapport au sol
2.2.2 Loi de Coulomb, cône de frottement et coefficient de frottement
La loi de Coulomb permet de modéliser le frottement sec, c'est-à-dire indépendant de la vitesse de glissement entre les 2 solides. Cette approximation est admise en l’absence d’autres éléments expérimentaux.
Lors du glissement, on définit un cône de frottement tel que la résultante �� soit
tangente à ce cône d’angle φ par rapport à la normale �� .
𝒕𝒂𝒏𝝋 =‖�� ‖
‖�� ‖= 𝒇𝒄𝒐𝒆𝒇𝒇𝒊𝒄𝒊𝒆𝒏𝒕 𝒅𝒆 𝒇𝒓𝒐𝒕𝒕𝒆𝒎𝒆𝒏𝒕
On énonce alors les trois règles suivantes relative à la loi de coulomb sur le glissement :
2020 . NfT avec f = tanφ et φ l’angle entre la normale et la résultante de .20
0. 02,20 AVT car la composante due au frottement est tangente à la vitesse de glissement
0. 02,20 AVT la composante tangentielle (action mécanique) s’oppose au déplacement à vitesse V
Ce dernier résultat correspond à une puissance interne, négative associée à des pertes.
![Page 5: LOI DE COULOMB Liaisons imparfaites et pertes internes et TD par centres_d... · rapport au solide [2] ... condition limite entre adhérence et frottement. ... Les systèmes ABS et](https://reader039.pdfslide.fr/reader039/viewer/2022031019/5b9ca01009d3f2f6368ce887/html5/page/5.jpg)
CI20 Cinématique et actions mécaniques dans les systèmes CI23 Dynamique par le théorème énergie / puissance
J-C Rolin Page 5 sur 8 TSI Eiffel Dijon
2.2.3 Exemple de la voiture en pente
La voiture ne glisse pas (adhérence) si en valeur absolue α < φ
Avec f = tan φ, coefficient d’adhérence des pneus sur le sol. Pneus neufs sur route normale
Route sèche f = 0,8 environ
Route mouillée f = 0,5 environ
2.3 Loi de Coulomb pour l’adhérence (2 pièces immobiles entre elles)
Soit φa l’angle maximum entre la normale au contact et la résultante de 0→ 2 à la
limite du glissement. On peut écrire une inéquation en valeur absolue en introduisant cette fois le coefficient d’adhérence fa, tel que fa = tan φa.
La composante tangentielle s’oppose toujours au déplacement qui tend à être provoqué,
La valeur de fa (adhérence) est proche de celle de f (frottement) mais en réalité supérieure, phénomène de « décollage »,
Les systèmes ABS et ESP ont pour objectif de maintenir les roues en situation d’adhérence et non de glissement.
Passage de l’adhérence au frottement (glissement)
STICK / SLIP : L’alternance sous forme périodique d’adhérence / frottement ou stick / slip en anglais explique le bruit de crissement (freins ou craie au tableau) et les tremblements de terre dus aux plaques tectoniques. Ce phénomène fait intervenir la déformation élastique des liaisons au contact.
2.4 Arc-boutement (« coincement »)
L’exemple connu de tous est celui du tiroir qui se met légèrement en biais et se « coince » lorsque l'on veut le refermer.
L'arc-boutement est une configuration pour laquelle l'équilibre permis par l'adhérence est indépendant de l'intensité des forces mais dépendant de leurs points d’application.
L'arc-boutement se produit lorsque l'angle α entre la normale au contact et la résultante en ce point est inférieur à l'angle φ du cône de frottement.
Ici en déplaçant le point d’application de la
force 𝐹 à gauche, la résultante va sortir du cône d’adhérence, il y aura glissement.
Animation flash en ligne : https://fr.wikipedia.org/wiki/Arc-boutement#/media/File:Arc-boutement1.gif
Serre joint
Coinceur d’escalade
L’arc-boutement ne dépend pas de l’intensité de la force mais de son point d’application
![Page 6: LOI DE COULOMB Liaisons imparfaites et pertes internes et TD par centres_d... · rapport au solide [2] ... condition limite entre adhérence et frottement. ... Les systèmes ABS et](https://reader039.pdfslide.fr/reader039/viewer/2022031019/5b9ca01009d3f2f6368ce887/html5/page/6.jpg)
CI20 Cinématique et actions mécaniques dans les systèmes CI23 Dynamique par le théorème énergie / puissance
J-C Rolin Page 6 sur 8 TSI Eiffel Dijon
3 MODELISATION DES ACTIONS LOCALES USUELLES
3.1 Domaines d’application
Le modèle global associe un torseur d’action mécanique pour une utilisation pratique en statique (étude de l’équilibre) ou en dynamique (étude de l’accélération).
Le modèle local permet d’étudier l’action et son effet en tout point de la zone où elle s’exerce ce qui est utile pour l’étude de la déformation des solides, des pressions de contact, des contraintes dans les matériaux.
Action locales en RDM : Seul le modèle à charge répartie donne une flèche correcte
Poutre de longueur L
GZ
4
I.E.8
L.pf =
Modèle local avec charge répartie p (N/m)
Poutre de longueur L
GZ
4
I.E.48
L.pf
5=
Modèle global avec charge ponctuelle (F = p.L à L/2)
Contact ponctuel ou surfacique :
Modèle local :
A cause des déformations, le contact réel entre deux solides s’effectue suivant une surface.
Modèle global
En supposant les solides indéformables, on considère
que l’étendue de la surface est extrêmement faible et que le contact peut être assimilé à un point : c’est le contact ponctuel.
Conclusion : Ces deux modèles ne sont pas interchangeables, si on peut déterminer le torseur d’action mécanique à partir de la répartition locale des efforts, on ne peut pas faire le travail inverse sans faire d’hypothèses sur la répartition.
3.2 Cas de la pesanteur, poids et centre de gravité
3.2.1 Modèle local
L’accélération de la pesanteur g (m/s²) s’exerce sur chaque volume élémentaire dv (m
3) au point M d’un solide S de masse volumique ρ (kg/m
3)
et permet de définir une force locale en M ou poids, tel que :
On intègre sur la totalité du solide S, le torseur des actions mécaniques en A :
Masses volumiques usuelles :
- Eau 1000kg /m3
- Acier 7900kg /m3
- aluminium 2700kg /m
3 - Béton 2300 à
2700 kg/m3
Cairn
3.2.2 Modèle global, centre de gravité
En SII, on admet uniforme le champ de gravité g, le centre de masse est alors le centre de gravité G définit par :
Pour un solide élémentaire S de masse volumique ρ uniforme, le torseur des actions mécaniques en G est :
Torseur de pesanteur en O d'un cylindre 2 en acier Longueur L = 1m ; rayon r=0,4m, masse volumique ρ = 7900kg/m
3
L
![Page 7: LOI DE COULOMB Liaisons imparfaites et pertes internes et TD par centres_d... · rapport au solide [2] ... condition limite entre adhérence et frottement. ... Les systèmes ABS et](https://reader039.pdfslide.fr/reader039/viewer/2022031019/5b9ca01009d3f2f6368ce887/html5/page/7.jpg)
CI20 Cinématique et actions mécaniques dans les systèmes CI23 Dynamique par le théorème énergie / puissance
J-C Rolin Page 7 sur 8 TSI Eiffel Dijon
3.2.3 Barycentre
Pour un système constitué de n solides élémentaires homogènes, dont on connaît pour chacun le centre de gravité Gi et la masse Mi, on peut écrire l’égalité suivante dite du barycentre « centre des poids » avec M masse totale du solide :
Pour chaque axe du
repère (𝑨, �� ,�� , �� ) :
n
i
ii AGmm
AG1
.1
Exemple : Solide composé de 2 parties 2 et 3
Soit : ∑∑∑===
===
n
1i
iGG
n
1i
iGG
n
1i
iGG m.zm
1z ; m.y
m
1y ; m.x
m
1x
iii
3.3 Actions surfaciques de contact (fluide sous pression, ou contact réparti)
3.3.1 Modèle local
L’action d’un fluide 1 sur une surface élémentaire ds centrée en M d’un solide 2, est définie par la force élémentaire :
3.3.2 Modèle global, centre de poussée (action d’un fluide) ou centre de liaison (action d’un solide)
En intégrant l’action locale élémentaire sur la totalité de la surface S de contact entre 1 et 2, on obtient le torseur :
Par définition, le point C est le centre de poussée (action d’un fluide) ou le centre de liaison (action d’un solide sans glissement) tel que le moment en ce point est nul.
avec C est centre de poussée. La pression de contact est supposée uniforme, sur une surface plane de diamètre d (diamètre du piston).
Le torseur de l’action mécanique du fluide sur le solide 1 se réduit sur l’axe (C, y ) à la résultante :
==→ 4
d..ps.pF
2
1Fluide
Exemple : tige de vérin
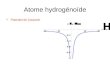
3.4 Liaison surfacique avec frottement, application au freinage
Dans le cas d’un frottement, entre deux solides 0 et 2 en contact par une surface S, en tout point de contact M, l’action mécanique élémentaire peut se décomposer en une
composante normale 𝑝. �� due à la pression p et en une composante tangentielle 𝑝𝑡 . 𝑡 due au frottement.
Sur la totalité de la surface S en contact, le torseur d’action mécanique est :
Frein à disque
L’application des lois de Coulomb permet d’écrire la relation 𝑝𝑡 = 𝑓. 𝑝, et donne le sens de 𝑡 qui s’oppose au déplacement. On peut ainsi pour des géométries simples calculer l’effort de freinage à partir de la pression
![Page 8: LOI DE COULOMB Liaisons imparfaites et pertes internes et TD par centres_d... · rapport au solide [2] ... condition limite entre adhérence et frottement. ... Les systèmes ABS et](https://reader039.pdfslide.fr/reader039/viewer/2022031019/5b9ca01009d3f2f6368ce887/html5/page/8.jpg)
CI20 Cinématique et actions mécaniques dans les systèmes CI23 Dynamique par le théorème énergie / puissance
J-C Rolin Page 8 sur 8 TSI Eiffel Dijon
3.5 Compléments 3.5.1 Matage ou pression de matage
Les liaisons à contact direct ou sur paliers lisses font intervenir la pression maximum au matage. La pression de matage conduit à une déformation permanente. Cette pression dépend notamment de la résistance maximum élastique Re et des mouvements relatifs. Sa valeur fluctue donc de 0,01.Re à Re. La résistance élastique Re est de l'ordre de 200 à 300 MPa pour les aciers courants.
3.5.2 Résistance au roulement et coefficient de roulement δ (m)
Les pièces se déforment sous l'effet des actions mécaniques au niveau du contact ce qui va engendrer une composante tangentielle de la résultante en cas de mouvement (ou de "tendance au mouvement). Cette composante tangentielle s'oppose au mouvement, c'est une action résistante.
Etude de l'équilibre d'une roue porteuse 1 en liaison pivot par rapport au châssis 2 et roulant sur un plan horizontal 0.
Cas 1 : absence de couple transmis
Cas 2 : couple transmis par la liaison
Le coefficient de roulement δ est homogène à une longueur; il représente le déplacement maximal du point d'application de la résultante par rapport au point de contact théorique.
Valeurs usuelles du coefficient de roulement