Embed Size (px)
Citation preview
REPUBLIQUE ALGERIENNE DEMOCRATIQUE ET POPULAIRE
MINISTERE DE L’ENSEGNEMENT SUPERIEUR ET DE LA RECHERCHE SCIENTIFIQUE
UNIVERSITE CHEKH LAARBI TEBESSI – TEBESSA
FACULTE DES SCIENCES ET TECHNOLOGIES
DEPARTEMENT DE GENIE CIVIL
MEMOIRE EN VUE DE L’OBTENTION DU DIPLOME DE
MAGISTERE
EN GENIE CIVIL
OPTION: SOLS ET STRUCTURES
THEME
CONTRIBUTION A LA JUSTIFICATION DES STRUCTURES
A ETAGES MULTIPLES A ASSEMBLAGES SEMI-RIGIDE
ET RESISTANCE PARTIELLE
Présenté par :
Mohamed Elamine KHOUALDI
Soutenu le : / /2014 devant le jury :
Président : Mr. Ali MESSABHIA M.C. Université de Tébessa
Rapporteur : Mme
. Zhor GUEMMADI M.C. Université Mentouri Constantine
Examinateur : Mr. Hocine CHABIL Prof. Université Mentouri Constantine
Mr. Noureddine LAHBARI M.C. Université de Batna
Mr. El Hadi HERKATI M.C. Université de Tébessa
2
Remerciement
Je tiens à remercier tout d’abord le dieu de m’avoir aidé à réaliser ce travail.
Un énorme et chaleureux merci à ma directrice de mémoire Mme GUEMMADI. Zhor,
maitre de conférences à l’université de Constantine pour tout ses encouragements, ses
efforts, et ses conseils bénéfiques afin que je puisse réaliser ce travail.
Je remercie également Mr LAHBARI Noureddine, maitre de conférences à l’université
de Batna, qui a suivi mon travail, pour tout le temps qu’il m’a consacré, pour ses
conseils et ses encouragements qui ont rendu ce travail possible, et de m’avoir fait le
plaisir de participer à mon jury de thèse.
Je présente également mon remerciement à Mr MESSABHIA Ali, maitre de
conférences à l’université de Tebessa pour m’avoir fait l’honneur d’accepter la
présidence du jury.
Un grand merci à Mr CHABIL Hocine, professeur à l’université de Constantine pour
l’intérêt qu’il a porté à ce sujet et de m’avoir fait le plaisir de participer à mon jury de
thèse.
Je tiens à remercier Mr HARKATI Elhadi, maitre de conférences à l’université de
Tebessa, qui m’a fait l’honneur d’avoir accepté de participer au jury et d’examiner
mon travail.
Je remercie tout les enseignants de la faculté de génie civil des universités de Batna et
Tébessa qui ont veillé sur ma formation durant ces années.
Je remercie aussi mes parents et toute ma famille, mes amis et toutes les personnes
qui m’ont soutenu encouragé à réaliser cette thèse.
Résumé
Traditionnellement, les assemblages sont considérés rigides ou articulés. En réalité, les assemblages
les plus flexibles sont capables de transmettre un certain moment de flexion tandis que les
assemblages les plus rigides autorisent toujours une rotation relative des pièces assemblées. Donc, le
comportement réel d'un assemblage peut avoir une influence considérable sur les distributions des
efforts intérieurs dans les éléments constitutifs de la structure, sur leur stabilité et sur les déplacements
de la structure sous charges verticales et horizontales. Ces efforts ne peuvent être évalués de manière
précise qu’a travers d’une modélisation qui approche le comportement réel de l’ensemble.
Le but principal de ce travail est d’évaluer l’influence des assemblages semi-rigides et résistance
partielles sur le comportement des structures métalliques à étages multiples en zones sismiques.
La première partie de ce travail est une synthèse bibliographique destinée principalement aux
assemblages poutre-poteau où on a parlé sur les différents modes et moyens d’assemblage ainsi que la
classification de ces derniers en mettant l’accent sur l’influence du choix des assemblages sur
l’analyse globale de la structure.
La deuxième partie est une présentation de la méthode de composantes proposée par l’EC3 qui
permette de déterminer analytiquement les caractéristiques principales des assemblages poutres-
poteaux.
La troisième partie est une présentation de plusieurs modèles mathématiques des courbes de
déformabilité proposés par les chercheures pour approcher au comportement réel de l’assemblage. On
a distingués les modèles sous chargements monotones et les modèles sous chargements cycliques.
La quatrième partie est consacrée à l’expérimentation numérique, où une étude paramétrique est
effectuée sur une seule structure métallique non contreventée à six étages et deux travées. L’étude
étant axée sur la variation théorique de la résistance et de la rigidité des assemblages .L’analyse du
portique se fait par une analyse dynamique non linéaire temporelle, où l’accélérogramme adopté est
celui du séisme de Boumerdes. Les résultats numériques sont donnés en fonction du période,
déplacement maximal de dernier étage, déplacement inter étage et l’effort tranchant à la base de la
structure en prenant aussi en considération l’influence de la semi- rigidité et/ou la résistance partielle
sur l’apparition des rotules plastiques dans les poutres, les poteaux et les assemblages.
Mots clés: assemblage, rigide, résistance, semi-rigide, résistance partielle, stabilité.
Abstract
Traditionally, the connections are considered rigid or articulated. In reality, the most flexible
joints are capable of transmitting a bending moment while the more rigid connections still
allow relative rotation of the assembled parts. So the actual behavior of an assembly can have
a significant influence on the distribution of the internal forces in the elements of the structure,
their stability and the movements of the vertical and horizontal loads in structure. These
efforts could only be measured precisely throughout using modeling approach that allows
achieving the real behavior of the building.
The main purpose of this project was to evaluate the influence of semi-rigid and partial
resistance connections on the behaviors of the multilevel steel structures in seismic areas.
In the first part of this project, literature review has been conducted that focuses mainly on
the beam-column joints where different modes, means, and classifications of connections were
explained; taking in consideration, the influence of the choice of assembly on the global
analysis of the structure.
In the second part, a presentation of the method of components proposed by EC3
accomplished that determine analytically the main characteristics of the beam-column
connection.
In the third part, a presentation of several mathematical models of deformable curves
proposed by the researchers to approach the actual assembly behavior has been presented. The
models were distinguished under two loadings, monotonic and cyclic.
In the fourth part, is devoted to the numerical experiment, where a parametric study is
performed on a single unbraced steel structure with six stories and two bays. The study is
focused on the theoretical variation of the resistance and stiffness of joints. Frame’s analysis is
done by a non-linear dynamic analysis, using Boumerdes seismic accelerogram. The
numerical results are given as a function of period, maximum displacement of the top story,
inter-story displacement and shear force at the base of the structure, taking into account the
influence of semi-rigidity and / or partial resistance to the appearance of plastic hinges in
beams, columns and connections.
Keywords: connection, rigid, resistance, semi-rigid, partial resistance, stability.
ملخص
مرونة األكثر المفاصل ، الواقع في ولكن .مفصلية تعتبر عناصر الربط إما صلبة أو, في تحليل المباني
ران وللعناصر المرتبطة بالد تسمح أن عناصر الربط الصلبة حين في االنحناءعزوم نقل على قادرة
الداخلية القوى توزيع على كبير تأثير لها يكون أن يمكنلعناصر الربط الفعلي السلوك فإن ولذلك. الجزئي
إال بدقة تقاس أن يمكن الهذه التأثيرات . على التحركات واالستقرار العام للمبنى و , الهيكل عناصر في
.بنىللم الفعلي لسلوكالتي تسمح بالتقرب ل النمذجة خالل من
المقاومة الجزئية على سلوك هذا العمل هو تقييم تأثير عناصر الربط ذو الصالبة و الرئيسي ل الهدف
.الهياكل المعدنية المتعددة الطوابق في المناطق الزلزالية
أين عمود -ببليوغرافي موجه أساسا حول عناصر الربط رافدة بحث مل عبارة عنعال هذا من الجزء االول
العام و طرق الربط و تصنيفها مع تبيان تأثير اختبار نوع الربط حول التحليل ظهر مختلف وسائلن
.للمبنى
و التي تسمح بحساب EC3هو عبارة عن تقديم و شرح لطريقة عناصر الربط المقترحة من الجزء الثاني
.عمود-الخصائص األساسية لعناصر الربط رافدة
يبين العديد من النماذج الرياضية للمنحنيات المقترحة من الباحثين للتقرب أكثر من السلوك الجزء الثالث
.الربطصر الحقيقي لعنا
قوم بدراسة بناء معدني غير مدعم ذو ستة الطوابق مع نأين مخصص للتجريب العددي الجزء الرابع
تحليل هذا المبنى يتم عن طريق تحليل ديناميكي غير . ير في قيمة الصالبة و المقاومة لعناصر الربطيتغ
انزياح الطابق , النتائج تعطى بداللة الدور ، خطي بداللة الزمن حيث نطبق زلزال بومرداس على المبنى
قوى القص عند القاعدة مع األخذ بعين االعتبار تأثير المقاومة و و الطوابقاالنزياح بين , األخير
.الصالبة الجزئية على ظهور المفاصل البالستيكية في الروافد و األعمدة و عناصر الربط
.استقرار, الجزئية مقاومة , الجزئيةة بصال, مقاومة , ةبصال, عناصر الربط : المفتاحية الكلمات
6
Liste des figures
Chapitre1 : Synthèse bibliographique
Figure 1-1 Configurations d'assemblages dans le plan
Figure 1-2 : Définition de la zone d'attache et de l'assemblage (assemblage poutre-poteau)
Figure 1-3 : Rivet et Rivet à anneau
Figure 1-4 : Les boulons employés dans la construction métallique
Figure 1-5 : Boulon ordinaire
Figure 1-6 : Boulon précontraint
Figure 1-7 : Exemples d’assemblages boulonnés avec platine
Figure 1-8 : Exemples d’assemblages boulonnés avec cornières
Figure 1-9 : Exemples d’assemblages soudés
Figure 1-10 : Comportement des assemblages métalliques
Figure 1-11 : Courbe moment-rotation d’un assemblage métallique
Figure 1-12 : Classification des assemblages poteau-poutre par rigidité
Figure 1-13 : Diagrammes de moment fléchissent avec divers modes de liaisons
Figure 1-14 : Limite de classification en résistance
Figure 1-15 : Assemblages à pleine résistance
Figure 1-16 : Classification des assemblages selon la capacité de rotation
Figure 1-17 : Classification des assemblages selon Bjorhovde, Brazetti et Colson (BBC)
Figure 1-18 : Limites recommandées par l’EC3 pour la classification des nœuds poutre-poteau
Figure1-19 : Modélisation d’un assemblage par un ressort en rotation
Figure 1-20 : Courbe moment-rotation d’un assemblage
Figure1-21 : Idéalisations de courbes Moment-Rotation de l'assemblage
Figure1-22 : Exemples de classement de courbes de moment-rotation d’assemblages poutre-
poteau
Figure1-23 : Moyens de renforcement des assemblages selon l'EC3
Figure1-24 : Assemblages avec raidisseurs de platine d’about débordante
Figure1-25 : Diagrammes de moment fléchissent avec divers modes de liaisons
Figure1-26 : Le moment résistant en fonction de la rigidité de rotation
Figure1-27 : Modélisation d'un assemblage dans l’analyse globale de la structure
Figure1-28 : Procédure classique de dimensionnement des éléments et des assemblages dans
une structure
7
Figure1-29 : Illustration d’un assemblage poutre-poteau dont les rotations sont provoquées
par le chargement de la poutre
Figure1-30 : Influence du comportement semi-rigide de l’assemblage sur la réponse de la
structure
Figure1-31 : Procédure nouvelle de dimensionnement de structure
Chapitre 2 : Approche analytique de calcul des assemblages selon l’EC3 (méthode des
composantes)
Figure 2-1 : Zones critiques dans les assemblages poutre-poteau
Figure 2-2 : Composantes de base de l’assemblage par platine d’about boulonnée
Figure 2-3 : Modèle à ressort pour un assemblage par platine d’about débordante boulonnée
Figure 2-4 : Définitions de tfb , tfc , rc et ap
Figure 2-5 : Deux tronçons en Té attaché par quatre boulons
Figure 2-6 : Mode1 (mécanisme plastique complet de la semelle)
Figure 2-7 : Diagramme de moment (mode1)
Figure 2-8 : Mécanisme par ruine des boulons avec plastification de la semelle et diagramme
de moment (mode2)
Figure 2-9 : Diagramme de moment (mode3)
Figure 2-10 : Schémas des lignes de plastification des tronçons en Té (mécanisme individuel)
Figure 2-11 : Schémas des lignes de plastification des tronçons en té (mécanisme de groupe)
Figure 2-12 : Définitions de m, e, e1, p
Figure 2-13 : Caractéristiques géométriques en relation avec la semelle du poteau
Figure 2-14 : Caractéristiques géométriques en relation avec la platine
Figure 2-15 : Valeurs de α pour les platines d'about
Figure 2-16 : Définitions de bp, w, mx et ex
Figure 2-17 : Répartition des efforts pour le calcul du moment résistant Mj,Rd
Figure 2-18: Répartition des efforts dans un assemblage poteau-poutre boulonné
Figure 2-19 : Approche EC3 pour le calcul de la rigidité initiale d'un assemblage poutre-
poteau par platine d’about boulonnée
8
Chapitre 3 : Modélisation mathématique des courbes de déformabilité des assemblages
Figure 3-1: Courbes moment-rotation de différents types d’assemblages
Figure 3-2 : Assemblage par cornière d’âme d’un seul coté
Figure 3-3 : Assemblage par cornières d’âme de deux coté
Figure 3-4 : Assemblage par cornières de semelle et d’âme
Figure 3-5 : Assemblage par cornières de semelle
Figure 3-6 : Assemblage par platine d’extrémité débordante
Figure 3-7 : Assemblage par platine d’extrémité non débordante
Figure 3-8 : Header plate
Figure3-9 : Représentation mathématique de différent courbes moment-rotation :(a) modèle
linéaire, (b) modèle bilinéaire, (c) modèle multilinéaire, (d) modèle non linéaire
Figure3-10 : Paramètres géométriques pour la représentation polynomiale Frye-Morris de
l’assemblage par plaque d'extrémité sans raidisseurs en poteaux
Figure 3-11 : Modèle de puissance à trois paramètres
Figure 3-12 : Modèle de ligne de délimitation
Figure3-13 : Modèle de Ramberg-Osgood
Figure3-14 : Modèle d’écrouissage indépendant
Figure 3-15 : Modèle de l’écrouissage cinématique
Figure3-16 : Problèmes associés au modèle cinématique durcissement: (a) le rechargement de
la région entre a et b, (b) le rechargement de la région entre b et c
Figure3-17 : Modèle de délimitation de surface
Chapitre 4 : Expérimentation numérique
Figure 4-1 : Définition de la rotation plastique θp selon l’Eurocode 8
Figure 4-2 : Dimension géométrique du portique étudié
Figure 4-3 : Accélérogramme du séisme de Boumerdes (composante N-S)
Figure 4-4 : Relation moment-rotation selon la norme FEMA 356
Figure 4-5 : Relation moment-rotation avec les niveaux de performances
Figure 4-6: Comportement hystérésis de l’élément ‘’Plastic’’ de Wen
Figure 4-7: Définition des paramètres de l’élément ‘’plastic’’ de Wen
Figure 4-8 : (a) nœuds rigides (à gauche) et semi-rigides (à droite); (b) modélisation des
nœuds semi-rigides
Figure 4-9 : Digramme poutre-ligne : La rigidité en rotation optimal
9
Figure 4-10 : déplacements maximal de dernier étage des portiques avec les assemblages
semi-rigides et résistances complètes
Figure 4-11 : Effort tranchant à la base des portiques avec les assemblages semi-rigides et
résistances complètes
Figure 4-12: Déplacements inter-étages du portique avec les assemblages semi-rigide et
résistances complètes
Figure 4-13 : Plastification des portiques avec les assemblages rigides et résistances
complètes
Figure 4-14 : Courbe moment-rotation des assemblages semi-rigides et résistances complètes
Figure 4-15 : Déplacements maximal de dernier étage des portiques avec les assemblages
rigides et résistances partielles
Figure 4-16 : Effort tranchant à la base des portiques avec les assemblages rigides et
résistances partielles
Figure 4-17: Déplacements inter-étages des portiques avec les assemblages rigides et
résistances partielles
Figure 4-18 : Plastification des portiques avec les assemblages rigides et résistances
partielles de type (Mj,pl = 0.75 Mb,pl )
Figure 4-19: Courbe moment-rotation des assemblages rigides et résistances partielles
Figure 4-20 : Déplacements maximal du dernier étage des portiques avec les assemblages
semi-rigides et résistances partielles
Figure 4-21 : Effort tranchant à la base des portiques avec les assemblages semi-rigides et
résistances partielles
Figure4-22: Déplacements inter-étages des portiques avec les assemblages semi-rigides et
résistances partielles
Figure 4-23 : Courbe moment-rotation des assemblages semi- rigides et résistances partielles
10
Liste des tableaux
Chapitre1 : Synthèse bibliographique
Tableau1-1 : Valeurs nominales de limite d'élasticité fyb et de résistance ultime à la traction
fub pour les Boulon
Tableau1-2 : Hypothèses d’assemblage et d’analyse globale de la structure
Chapitre 2 : Approche analytique de calcul des assemblages selon l’EC3 (méthode des
composantes)
Tableau 2-1 : Valeurs du coefficient réducteur ω
Tableau 2-2: Valeurs de la longueur efficace de la semelle du poteau non raidi
Tableau 2-3: Groupement en série et en parallèle des composantes
Tableau2-4: Tableau récapitulatif de la méthode des composantes pour un assemblage avec
platine d’extrémité débordante
Chapitre 3 : Modélisation mathématique des courbes de déformabilité des assemblages
Tableau3-1 : Types d’assemblages utilisés dans la base de données de Kishi et Chen
Chapitre 4 : Expérimentation numérique
Tableau 4-1 : Caractéristique géométrique des portiques étudié
Tableau 4-2 : Valeurs limites de déplacement inter-étages selon les niveaux de performance
Tableau 4-3 : Valeurs de S et Mj,pl d’un assemblage semi-rigide et résistance complète
Tableau 4-4 : Valeurs de S et Mj,pl d’un assemblage rigide et résistance partielle
Tableau 4-5 : Valeurs de S et Mj,pl d’un assemblage semi- rigide et résistance partielle
Tableau 4-6 : Périodes de vibrations
Tableau 4-7 : Déplacements maximal de dernier étage des portiques avec les assemblages
semi-rigides et résistances complètes
Tableau 4-8 : Effort tranchant à la base des portiques avec les assemblages semi-rigides et
résistances complètes
Tableau 4-9: Déplacements inter-étages des portiques avec les assemblages semi-rigides et
résistances complètes
11
Tableau 4-10 : Déplacements maximal de dernier étage des portiques avec les assemblages
rigides et résistances partielles
Tableau 4-11 : Effort tranchant à la base des portiques avec les assemblages rigides et
résistances partielles
Tableau4-12 : Déplacements inter-étages des portiques avec les assemblages rigides et
résistances partielles
Tableau 4-13 : Déplacements maximal du dernier étage des portiques avec les assemblages
semi-rigides et résistances partielles
Tableau 4-14 : Effort tranchant à la base des portiques avec les assemblages semi-rigides et
résistances partielles
Tableau4-15: Déplacements inter-étages des portiques avec les assemblages semi-rigides et
résistances partielles
12
Notation et symboles utilisés
A :
Ac : Aire de la section du poteau
Ab : Aire de la section de la poutre
Avc : Aire de cisaillement du poteau
As : l’aire de la section résistante en traction du boulon
B :
bc : La largeur du poteau
bb : La largeur de la poutre
bp : La largeur de la platine
beff.t.wc : La largeur efficace de l'âme du poteau en traction
beff.c,wc: la largeur efficace de l'âme du poteau comprimée
Bt,Rd : est la résistance à la traction d'un ensemble boulons-semelle
C :
C1, C2 et C3 : constantes d'ajustement de courbe
Cj : constante d'ajustement de courbe obtenue à partir d'une analyse de régression linéaire
C : est une constante qui contrôle la pente de la courbe
D :
dwc : La hauteur de l’âme du poteau
dwb : La hauteur de l’âme de la poutre
d : Diamètre nominal du boulon
Dk : paramètre constant pour la partie linéaire de la courbe
dw : Diamètre de la rondelle, de la tête du boulon ou de l'écrou selon la partie qui est en
contact avec la semelle
E :
E : Module d’élasticité longitudinal
e fc : La distance entre le bords de la semelle du poteau et le centre des rangées de boulons.
e pl : La distance entre le bords de la platine du poteau et le centre des rangées de boulons.
e : La distance entre la centre de gravité de la rangée du boulon et le bord de la semelle du
poteau (distance horizontale)
e1 : La distance entre le centre de gravité de la rangée du boulon et le bord de la semelle du
poteau (distance verticale)
13
ex : la distance verticale entre l’axe des boulons et l’extrémité de la platine
F :
fy : Limite d'élasticité
fy.c : La limite d’élasticité de l’acier de la section du poteau
fy.wc : La limite d’élasticité de l’acier de l’âme du poteau
fy.b : La limite d’élasticité de la l’acier de la section de la poutre
fy.p : La limite d’élasticité de la platine d’extrémité
fu.b : La résistance à la traction d’un boulon
fy.b : La limite d’élasticité d’un boulon
FT,Rd : résistance à la traction d’une semelle de tronçon en Té
Ft(i).Rd : Résistance de la rangée de boulons (i) soumise à la traction
F t1.Rd : valeur de calcul de la résistance de la rangée de boulons la plus éloignée du centre de
résistance de la zone comprimée.
G :
G : Module d’élasticité transversal
H :
hc : La hauteur de la section du poteau
hb : La hauteur de la section de la poutre
hi : Distance de la rangée de boulons (i) du centre de compression situé au milieu de
l’épaisseur de la semelle comprimée de la poutre.
h1 : distance entre la rangée de boulons la plus éloignée et le centre de résistance de la zone
comprimée.
I :
Ib : Le moment d’inertie de la poutre
K :
K : paramètre dépend des propriétés géométriques et mécaniques de la structure
Kb : est la valeur cumulée des inerties Ib/Lb de toutes les poutres d’un étage
Kc : est la valeur cumulée des inerties Ic/Lc de tous les poteaux d’un étage.
Kwc : Coefficient de réduction qui tient en compte l'influence de la contrainte de Compression
longitudinale exercée dans l'âme de poteau
Ki*: est la rigidité efficace de la rangée i de boulons
14
keq : la rigidité équivalent du ressort
kt : La rigidité de la partie en traction de l’assemblage
L :
Lb : la longueur utile d'allongement du boulon, prise égale à la longueur serrée
(épaisseur totale des plaques et des rondelles), plus la moitié de la somme de la hauteur de la
tête du boulon et de la hauteur de l'écrou.
leff : La longueur équivalente du tronçon en té
Leff.t.fc : la longueur efficace de la semelle du poteau
leff.t.wc : La longueur efficace de l’âme du poteau en traction
leff.p : La longueur efficace de la platine d’extrémité en flexion
M :
m : la distance entre l’axe des boulons et l’âme
M0 : la valeur de départ du moment d’assemblage auquel la courbe est stable
Mc : le moment de délimitation
Mu : le moment idéal du mécanisme élastique-plastique
My : le moment élastique
Mp : le moment plastique de l’assemblage
Mj.Rd = Le moment fléchissant de calcule de l’assemblage
Mc,Rd : est le moment résistant de la section transversale de poutre
Mpl1.Rd : le moment de résistance plastique de calcul pour la platine d’extrémité ou la semelle
de poteau relatif au premier mode de ruine.
Mpl2.Rd : le moment de résistance plastique de calcul pour la platine d’extrémité ou la semelle
de poteau relatif au deuxième mode de ruine.
mx: la distance entre les boulons situés dans la platine débordante et la semelle de la poutre
Msd : Le moment sollicitant
Mb.pl : moment plastique de la poutre
Mc.pl : moment plastique du poteau
N :
n : la distance entre l’axe des boulons et l’extrémité extérieure du profilé
P :
p: la distance verticale entre deux rangées de boulons
Pi : paramètres géométriques de l'articulation
15
Q :
Q : La force ou l’effort de levier
R :
r: facteur de fixation
rc : Le rayon de la courbure qui se trouve au niveau de la jonction âme – semelle d’un profité
laminé de poteau
rb : Le rayon de la courbure qui se trouve ou niveau de la jonction âme – semelle d’un profité
laminé de poutre
Rb : la pente de la ligne de délimitation
Rkp : la rigidité de délimitation
Rkf : est la rigidité d'écrouissage de l’assemblage
Rki : est la rigidité élastique de l’assemblage initiale
Rkt : la rigidité tangente de l’assemblage
: La résistance de calcul de l’assemblage, déterminée conformément à l’Eurocode 3
: La résistance plastique nominale de l’élément dissipatif qui doit être assemblé
S :
Sopt : rigidité de rotation optimal
sp : est la longueur obtenue par diffusion à 45° dans la platine d'about (au moins tp et, sous
réserve que la longueur de la platine d'about au-delà de la semelle soit suffisante, jusqu'à 2tp)
Sj.ini : La rigidité initiale de l’assemblage (poutre – poteau)
Sj : La rigidité nominale de l’assemblage (poutre –poteau)
T :
twc : Épaisseur de l'âme de poteau
tfc : L’épaisseur de la semelle du poteau
twb : L’épaisseur de l’âme de la poutre
t fb : L’épaisseur de la semelle de la poutre
t p : L’épaisseur de la platine d’extrémité
W :
W : la distance horizontal entre les deux files des boulons.
Wpl: Module plastique de section
Z :
z : variable interne d’hystérésis
16
D’AUTRES CARACTERES
β : Paramètre de transformation
φ = θr : rotation d’un assemblage
θk : est la rotation de départ de la composante linéaire de la courbe
η : coefficient de modification de la rigidité
υ : Coefficient de Poisson
φcd : Capacité de rotation de l’assemblage
ω : coefficient réducteur tenant compte des effets éventuels du cisaillement dans le
panneau d'âme du poteau
γm0 : Coefficient de la sécurité égale à 1.10
: correspond à un facteur de sur-résistance lié à la variation de la limite d’élasticité réelle
dans les éléments dissipatifs, comparé à la limite d’élasticité nominale
ρ : est le coefficient réducteur pour le voilement
λp : représente l'élancement de plaque
∆t : Allongement du ressort unique de rigidité kt
∆c : Raccourcissement du ressort kc représentant la zone comprimée de l'âme du poteau
∆i : La valeur du déplacement relatif entre les étages pour un étage i de la structure
σcom.Ed : La contrainte maximale de compression longitudinale exercée dans l ’âmes de poteau
à la racine du rayon en un point situé juste à l’extérieure de l’assemblage
αi : coefficients obtenus pour donner un bon ajustement de la courbe
α : rapport entre la rigidité en rotation de l’assemblage et la rigidité de la poutre
δ : la distance de l'état actuel instant de la borne correspondante
δin : la valeur de δ à l'ouverture de chaque processus de chargement
δi: le déplacement absolu au niveau de l’étage i
17
LES INDICES
b : beam = poutre
c : colomn =poteau
w : web = ame
wc : ame du Poteau
wb :ame de la poutre
f :flang =semelle
fc : semelle du poteau
fb : semelle de la poutre
Rd : résistant de calcul
Sd : sollicitant
t : traction
c : compression
f : flexion
eff : efficace ou effectif
j : Joint =assemblage
ini : initiale
cd : capacité
s : schear = cisaillement
v : force de cisaillement ( effort)
pl : plastique
18
TABLE DES MATIERES
Remerciements……………………………………………………………………………………………2
Résumé………………………………………………………………………………………………….....3
Abstract…………………………………………………………………………………………………....4
5.....………………………………………………………………………………………………… ملخص
Liste des figures ………………………………………………………………………………………….6
Liste des tableaux……………………………………………………………………………………....10
Notation et symboles utilisés………………………………………………………………………… 12
Tables de matières……………………………………………………………………………………...18
Introduction générale ...........................................................................................................21
CHAPITRE 1 : Synthèse bibliographique
1-1 Définitions ……………………………………………………………………………..24
1-2 Différents modes et moyens d’assemblages…………………………………………....25
1-3 Fonctionnement des assemblages ……………………………………………………...30
1-4 Critères de choix des moyens d’assemblages…………………………………………..31
1-5 Les différentes configurations d’assemblages poutre-poteau ……………………….....31
1-6 Caractérisation du comportement des assemblages poutre-poteau …………………… 33
1-7 Classification des assemblages………………………………………………………....35
1-7-1 Classification par rigidité………………………………………………………35
1-7-2 Classification par résistance……………………………………………………37
1-7-3 Classification par ductilité…………………………………………………….. 38
1-8 Modélisation des assemblages ………………………………………………………....41
1-9 Courbe générale de comportement moment-rotation…………………………………..42
1-10 Idéalisations de courbes Moment-Rotation de l'assemblage ………………………...43
1-11 Classification des courbes moment-rotation…………………………………………. 45
1-12 Renforcement d’assemblages………………………………………………………... 46
1-13 Analyse d’une poutre avec des liaisons semi-rigide…………………………………..48
19
1-14 Introduction du comportement des assemblages dans les analyses globales des
Structures……………………………………………………………………………….50
1-15 Approche traditionnelle de modélisation des assemblages pour l’analyse structurale…52
1-16Approche ‘’semi-rigide’’ de modélisation des assemblages pour l’analyse structurale…53
1-17 Avantages de l’approche semi-rigide …………………………………………………. 56
CHAPITRE 2 : Approche analytique de calcul des assemblages selon l’EC3 (méthode des
composantes)
2-1 Introduction………………………………………………………………………………59
2-2 Identification des composantes…………………………………………………………..60
2-3 Modèle mécanique à ressort…………………………………………………………….. 61
2-4 Caractérisation des composantes……………………………………………………….. 62
2-4-1 Résistance des composantes de l’assemblage……………………………………..62
2-4-2 Rigidité des composantes de l’assemblage………………………………………..75
2-4-3 Assemblage des Composantes…………………………………………………….76
a- Calcul du moment résistant de l’assemblage………………………………........76
b- Calcul de la rigidité de l’assemblage…………………………………………....79
2-4-4 Détermination de la capacité de rotation…………………………………………. 84
CHAPITRE 3 : Modélisation mathématique des courbes de déformabilité des assemblages
3-1 Introduction……………………………………………………………………………...86
3-2 Base de données des assemblages……………………………………………………….86
3-4 Comportement sous chargement monotone …………………………………………….90
3-4-1 Modèle linéaire…………………………………………………………………….90
3-4-2 Modèle polynomial………………………………………………………………...91
3-4-3 Modèle de puissance……………………………………………………………….92
3-4-4 Modèle de ligne de délimitation…………………………………………………... 93
3-4-5 Modèle de Ramberg-Osgood……………………………………………………… 94
20
3-4-6 Modèle exponentiel………………………………………………………………...95
3-5 Comportement sous chargement cyclique………………………………………………96
3-5-1 Modèle d’écrouissage indépendant………………………………………………..96
3-5-2 Modèle d’écrouissage cinématique………………………………………………...97
3-5-3 Modèle de délimitation de surface avec des variables internes …………………...98
CHAPITRE 4 : Expérimentation numérique
4-1 Introduction………………………………………………………………………….... 101
4-2 Comportement des portiques non contreventés durant un séisme………………….... 101
4-3 Exigences de l’Eurocode 8 pour les assemblages semi-rigides et résistance partielle.. 101
4-4 Présentation de la structure étudiée…………………………………………………....103
4-5 Rotules plastiques dans les poutres et les poteaux…………………………………….105
4-6 Niveau de performance………………………………………………………………..106
4-7 Déplacements inter-étages…………………………………………………………… 107
4-9 Modélisation des assemblages………………………………………………………. 108
4-10 Facteur de fixation………………………………………………………………….. 110
4-11 Simulation Numérique…………………………………………………………….. . 112
4-11-1 Analyse avec assemblages semi-rigides et résistances complètes …………...112
4-11-2 Analyse avec assemblages rigides et résistances partielles…………………....112
4-11-2 Analyse avec assemblages semi-rigides et résistances partielles………..…... 113
4-12 Résultats numériques ………………………………………………………………. 113
4-12-1 Analyse avec assemblages semi-rigides et résistances complètes…..…….... .113
4-12-2 Analyse avec assemblages rigides et résistances partielles…………………...118
4-12-2 Analyse avec assemblages semi-rigides et résistances partielles…………….122
Conclusion générale et recommandations……………………………………………....127
Références Bibliographiques………………………………………………………….....131
Introduction générale
21
Introduction générale
Dans ce mémoire de magister intitulé « la contribution à la justification des structures
à étages multiples à assemblages semi-rigides et à résistance partielle», on a essayé de
faire une étude sur le comportement des structures à étages multiples en prenant en
considération l’influence des assemblages semi-rigides et résistance partielles. Cette
étude oblige à tracer un plan de travail comprenant les étapes suivantes :
Le premier chapitre est consacré aux généralités sur les assemblages poutre- poteau
avec les différentes configurations utilisées dans les constructions métalliques, en
donnant quelques définitions sur les différents modes et moyens d’assemblages. Aussi
dans cette partie on a présenté la classification des assemblages qui est basée sur la
courbe moment-rotation qui décrit le comportement de ces assemblages, et enfin on a
parlé sur l’influence du choix des assemblages sur l’analyse globale de la structure en
démontrant l’avantage de la semi-rigidité.
Le deuxième chapitre est consacré à l’étude et l’application détaillée de la méthode des
composantes de l’EC3 qui considère un assemblage comme un ensemble de
composantes individuelles, chaque composante est représentée par un ressort ayant sa
propre loi. Les composantes sont ensuite associées en série ou en parallèle selon la
configuration géométrique de l’assemblage. Cette association permet d’aboutir à un
comportement en terme de courbe moment -rotation de l’assemblage. La procédure de
détermination du comportement d’un assemblage, selon la méthode de composante,
peut être résumée en trois étapes :
1- Identification des composantes.
2- Caractérisation du comportement de chaque composante individuelle.
3- Assemblage des composantes en vue de la détermination du comportement de
l’assemblage.
Le troisième chapitre est consacré à l’étude des modèles mathématiques des courbes
non linéaires moment-rotation, Plusieurs expressions mathématiques sont proposées
pour représenter la courbe moment-rotation, parmi ces expressions on peut citer pour
Introduction générale
22
le comportement sous chargement monotone : le modèle linéaire, le modèle
polynomial, le modèle de puissance, le modèle de ligne de délimitation, le modèle de
Ramberg-Osgood et le modèle exponentiel.
Pour le comportement sous chargement cyclique, on a parlé sur le modèle
d’écrouissage indépendant, le modèle d’écrouissage cinématique et le modèle de
délimitation de surface avec des variables internes.
Le dernier chapitre est consacré à l’expérimentation numérique, où une étude
paramétrique est effectuée sur une seule structure métallique non contreventée à six
étages et deux travées dont l’objectif est d’étudier l’influence de la semi-rigidité et la
résistance partielle de l’assemblage sur les caractéristiques dynamiques de ces
structures, l’étude étant axée sur la variation théorique de la résistance et de la rigidité
des assemblages, la modélisation de ces derniers est effectuée dans SAP 2000 en
utilisant l’élément LINK qui est basée sur le comportement d'hystérésis proposé par
Wen (1976). Les résultats numériques sont donnés en fonction du période,
déplacement maximal de dernier étage, déplacement inter étage et l’effort tranchant à
la base de la structure en prenant aussi en considération l’influence de la semi- rigidité
et/ou la résistance partielle sur l’apparition des rotules plastiques dans les poutres, les
poteaux et les assemblages. L’analyse et l'interprétation des résultats obtenus par ce
traitement numérique ont permis de constater l'influence positive ou négative de la
semi- rigidité et/ou la résistance partielle sur le comportement général de la structure.
CHAPITRE 1
Synthèse bibliographiques
CHAPITRE1 : Synthèse bibliographiques
24
1-1 Définitions :
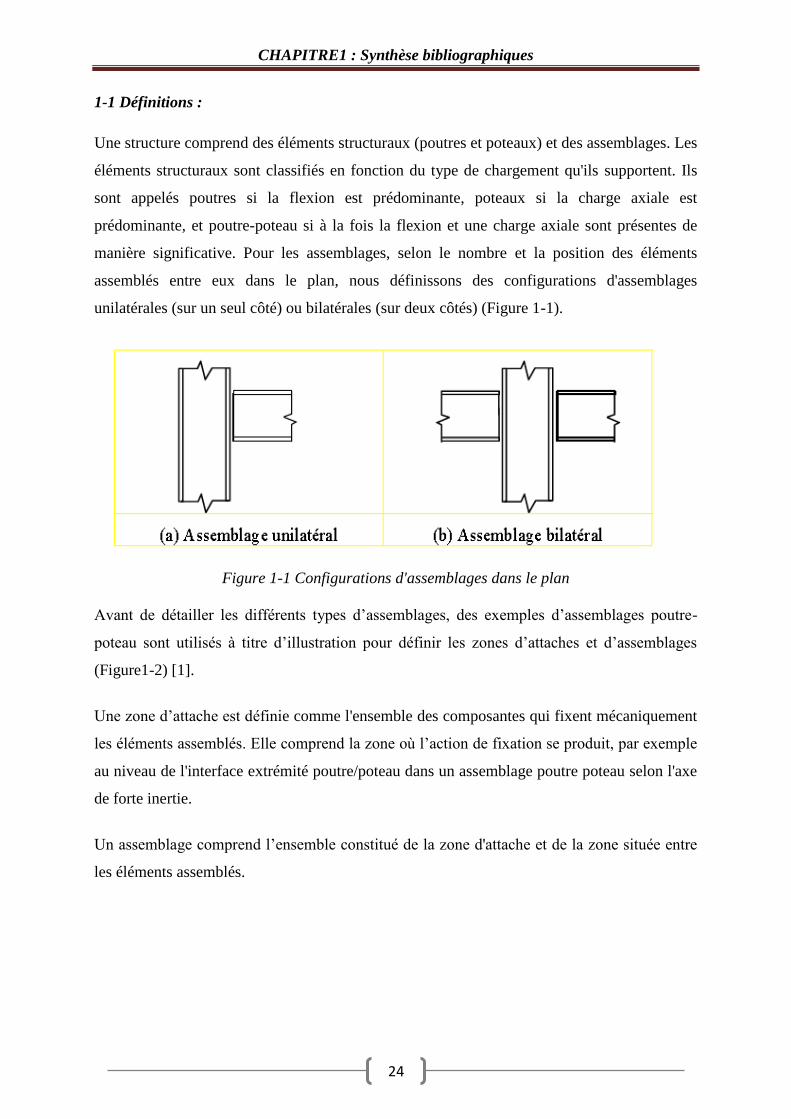
Une structure comprend des éléments structuraux (poutres et poteaux) et des assemblages. Les
éléments structuraux sont classifiés en fonction du type de chargement qu'ils supportent. Ils
sont appelés poutres si la flexion est prédominante, poteaux si la charge axiale est
prédominante, et poutre-poteau si à la fois la flexion et une charge axiale sont présentes de
manière significative. Pour les assemblages, selon le nombre et la position des éléments
assemblés entre eux dans le plan, nous définissons des configurations d'assemblages
unilatérales (sur un seul côté) ou bilatérales (sur deux côtés) (Figure 1-1).
Figure 1-1 Configurations d'assemblages dans le plan
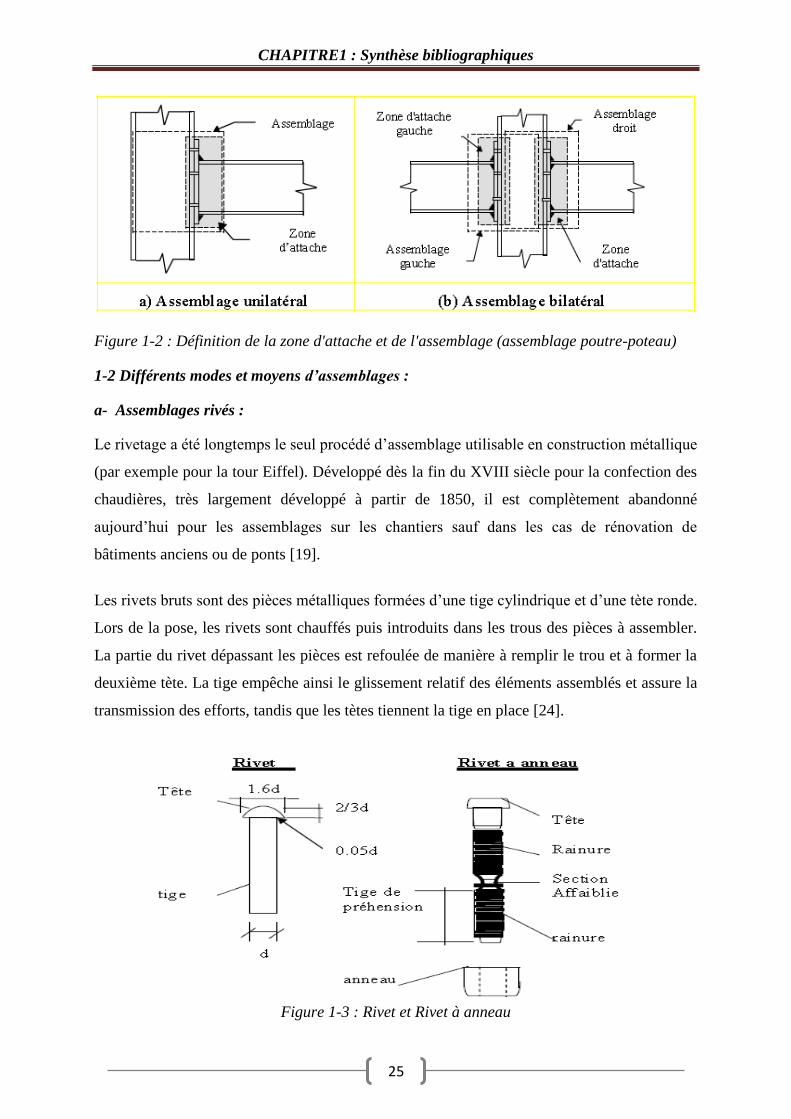
Avant de détailler les différents types d’assemblages, des exemples d’assemblages poutre-
poteau sont utilisés à titre d’illustration pour définir les zones d’attaches et d’assemblages
(Figure1-2) [1].
Une zone d’attache est définie comme l'ensemble des composantes qui fixent mécaniquement
les éléments assemblés. Elle comprend la zone où l’action de fixation se produit, par exemple
au niveau de l'interface extrémité poutre/poteau dans un assemblage poutre poteau selon l'axe
de forte inertie.
Un assemblage comprend l’ensemble constitué de la zone d'attache et de la zone située entre
les éléments assemblés.
CHAPITRE1 : Synthèse bibliographiques
25
Figure 1-2 : Définition de la zone d'attache et de l'assemblage (assemblage poutre-poteau)
1-2 Différents modes et moyens d’assemblages :
a- Assemblages rivés :
Le rivetage a été longtemps le seul procédé d’assemblage utilisable en construction métallique
(par exemple pour la tour Eiffel). Développé dès la fin du XVIII siècle pour la confection des
chaudières, très largement développé à partir de 1850, il est complètement abandonné
aujourd’hui pour les assemblages sur les chantiers sauf dans les cas de rénovation de
bâtiments anciens ou de ponts [19].
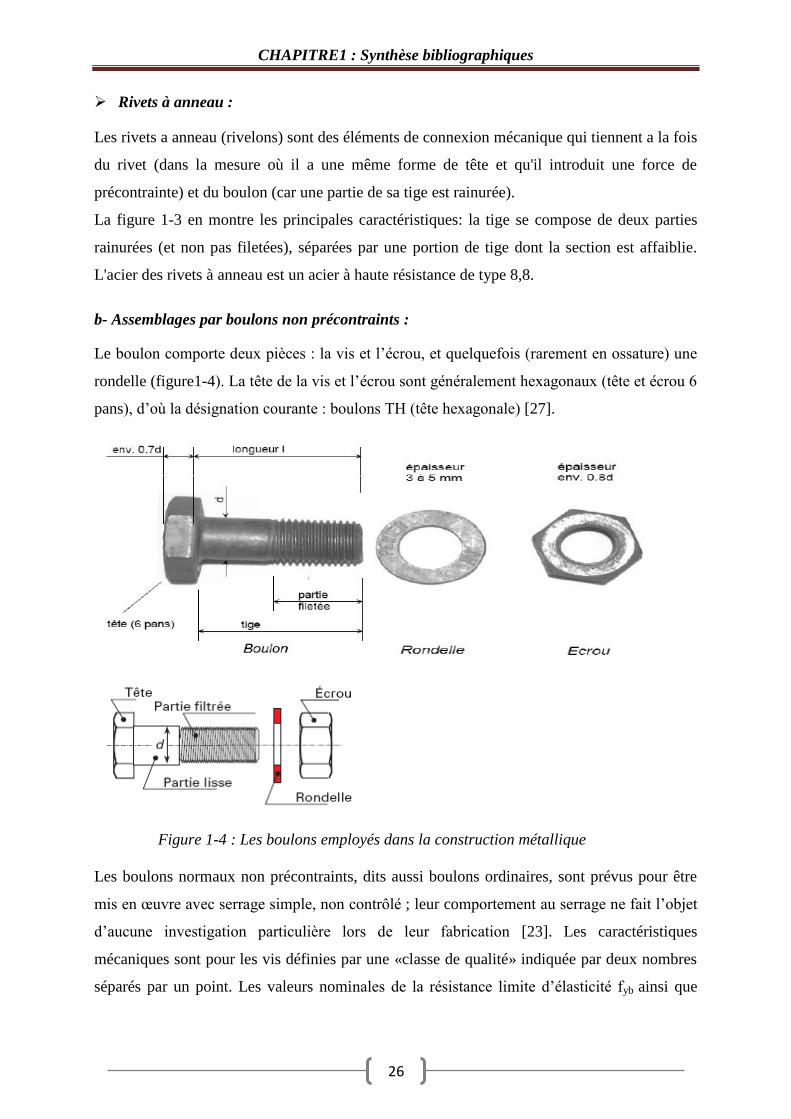
Les rivets bruts sont des pièces métalliques formées d’une tige cylindrique et d’une tète ronde.
Lors de la pose, les rivets sont chauffés puis introduits dans les trous des pièces à assembler.
La partie du rivet dépassant les pièces est refoulée de manière à remplir le trou et à former la
deuxième tète. La tige empêche ainsi le glissement relatif des éléments assemblés et assure la
transmission des efforts, tandis que les tètes tiennent la tige en place [24].
Figure 1-3 : Rivet et Rivet à anneau
CHAPITRE1 : Synthèse bibliographiques
26
Rivets à anneau :
Les rivets a anneau (rivelons) sont des éléments de connexion mécanique qui tiennent a la fois
du rivet (dans la mesure où il a une même forme de tête et qu'il introduit une force de
précontrainte) et du boulon (car une partie de sa tige est rainurée).
La figure 1-3 en montre les principales caractéristiques: la tige se compose de deux parties
rainurées (et non pas filetées), séparées par une portion de tige dont la section est affaiblie.
L'acier des rivets à anneau est un acier à haute résistance de type 8,8.
b- Assemblages par boulons non précontraints :
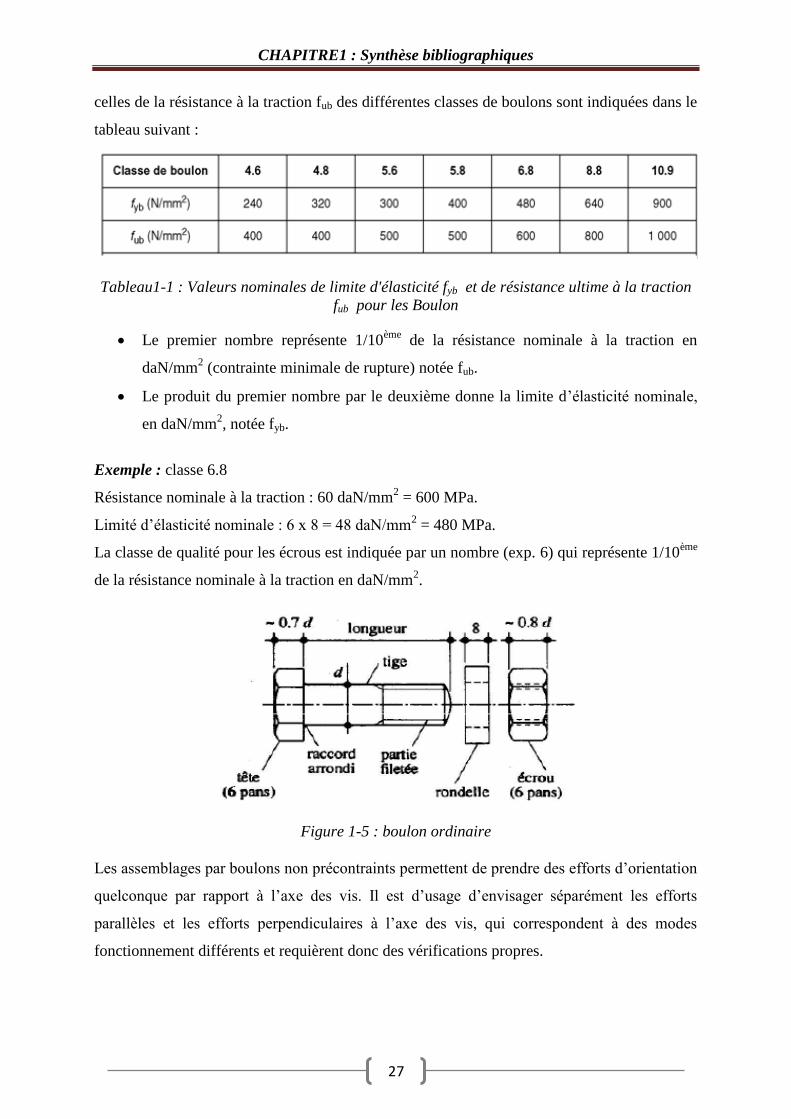
Le boulon comporte deux pièces : la vis et l’écrou, et quelquefois (rarement en ossature) une
rondelle (figure1-4). La tête de la vis et l’écrou sont généralement hexagonaux (tête et écrou 6
pans), d’où la désignation courante : boulons TH (tête hexagonale) [27].
Figure 1-4 : Les boulons employés dans la construction métallique
Les boulons normaux non précontraints, dits aussi boulons ordinaires, sont prévus pour être
mis en œuvre avec serrage simple, non contrôlé ; leur comportement au serrage ne fait l’objet
d’aucune investigation particulière lors de leur fabrication [23]. Les caractéristiques
mécaniques sont pour les vis définies par une «classe de qualité» indiquée par deux nombres
séparés par un point. Les valeurs nominales de la résistance limite d’élasticité fyb ainsi que
CHAPITRE1 : Synthèse bibliographiques
27
celles de la résistance à la traction fub des différentes classes de boulons sont indiquées dans le
tableau suivant :
Tableau1-1 : Valeurs nominales de limite d'élasticité fyb et de résistance ultime à la traction
fub pour les Boulon
Le premier nombre représente 1/10ème
de la résistance nominale à la traction en
daN/mm2 (contrainte minimale de rupture) notée fub.
Le produit du premier nombre par le deuxième donne la limite d’élasticité nominale,
en daN/mm2, notée fyb.
Exemple : classe 6.8
Résistance nominale à la traction : 60 daN/mm2 = 600 MPa.
Limité d’élasticité nominale : 6 x 8 = 48 daN/mm2 = 480 MPa.
La classe de qualité pour les écrous est indiquée par un nombre (exp. 6) qui représente 1/10ème
de la résistance nominale à la traction en daN/mm2.
Figure 1-5 : boulon ordinaire
Les assemblages par boulons non précontraints permettent de prendre des efforts d’orientation
quelconque par rapport à l’axe des vis. Il est d’usage d’envisager séparément les efforts
parallèles et les efforts perpendiculaires à l’axe des vis, qui correspondent à des modes
fonctionnement différents et requièrent donc des vérifications propres.
CHAPITRE1 : Synthèse bibliographiques
28
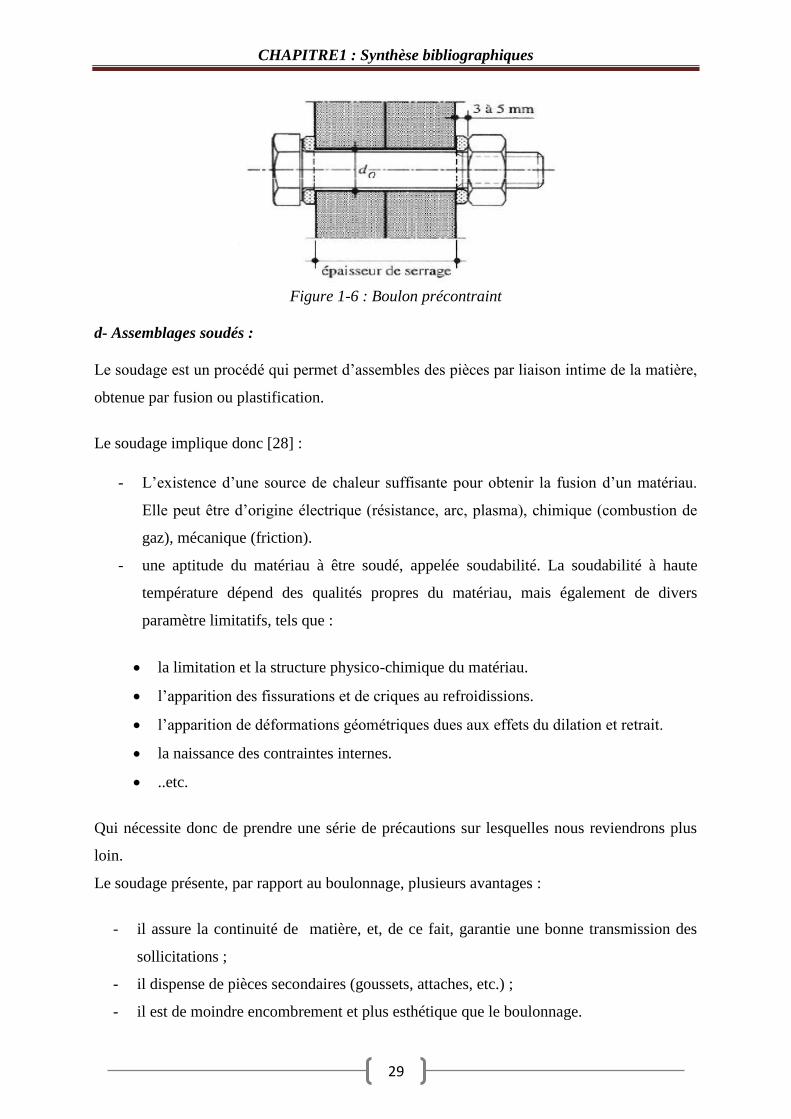
c- Assemblages par boulons précontraints :
Pour les boulons à haute résistance, l’acier employé permet de les précontraindre en les
serrant très fortement. Ce serrage provoque une forte pression sur les pièces assemblées,
autour des boulons, cette pression empêche un glissement relatif des pièces assemblées : on
parle alors d’assemblage précontraint. La mise en précontrainte, obtenue de préférence par
serrage des écrous, exige un contrôle soigneux de ce serrage. Il existe principalement deux
méthodes de contrôle :
La première méthode consiste à mesurer le couple de serrage appliqué à l’écrou
pour obtenir la précontrainte nécessaire. Ce couple est obtenu au moyen d’une clé
dynamométrique manuelle ou d’une clé à chocs pneumatique ou électrique, qui se
déclenche lorsque le couple nécessaire est atteint.
La deuxième méthode est un procédé dit combiné, consistant à appliquer à l’écrou
environ 75% du couple nécessaire pour obtenir la précontrainte requise, puis à
donner à l’écrou un quart de tour supplémentaire.
Un bon assemblage par boulons HR nécessite la prise des précautions suivantes :
la tête du boulon ne doit pas poinçonner les pièces assemblées (d’où l’interposition
d’une rondelle)
la force de précontrainte doit bien être appliquée à sa valeur de calcul (d’où
l’importance du couple de serrage et la nécessité d’utiliser des clés
dynamométriques ou pneumatiques)
le coefficient de frottement doit correspondre à sa valeur de calcul. Cela peut
nécessiter une préparation des surfaces (par brossage ou grenaillage) pour éliminer
toute trace de rouille, de graisse …
Les assemblages précontraints présentent une déformabilité très sensiblement réduite par
rapport aux assemblages par boulons non précontraints. Pour cette raison, il n’est pas permis
de mélanger dans un même assemblage boulons ordinaires et boulons précontraints.
CHAPITRE1 : Synthèse bibliographiques
29
Figure 1-6 : Boulon précontraint
d- Assemblages soudés :
Le soudage est un procédé qui permet d’assembles des pièces par liaison intime de la matière,
obtenue par fusion ou plastification.
Le soudage implique donc [28] :
- L’existence d’une source de chaleur suffisante pour obtenir la fusion d’un matériau.
Elle peut être d’origine électrique (résistance, arc, plasma), chimique (combustion de
gaz), mécanique (friction).
- une aptitude du matériau à être soudé, appelée soudabilité. La soudabilité à haute
température dépend des qualités propres du matériau, mais également de divers
paramètre limitatifs, tels que :
la limitation et la structure physico-chimique du matériau.
l’apparition des fissurations et de criques au refroidissions.
l’apparition de déformations géométriques dues aux effets du dilation et retrait.
la naissance des contraintes internes.
..etc.
Qui nécessite donc de prendre une série de précautions sur lesquelles nous reviendrons plus
loin.
Le soudage présente, par rapport au boulonnage, plusieurs avantages :
- il assure la continuité de matière, et, de ce fait, garantie une bonne transmission des
sollicitations ;
- il dispense de pièces secondaires (goussets, attaches, etc.) ;
- il est de moindre encombrement et plus esthétique que le boulonnage.
CHAPITRE1 : Synthèse bibliographiques
30
En revanche il présente plusieurs inconvénients :
- Le métal de base doit être soudable ;
- Les contrôles des soudures est nécessaire et onéreux ;
- Les contrôles des soudures est aléatoire ;
- Le soudage exige une main-d’œuvre qualifiée et un matérielle spécifiques.
e-Autres moyens d’assemblages :
Les assemblages par collages :
Les assemblages par collages peu utilisés, car il s’agit d’une technique non encore
réglementée, qui exige une préparation des surfaces particulièrement méticuleuse, sans
laquelle les colles (résines de synthèses), bien qu’extrêmement performantes, ne
peuvent garantir la cohésion suffisante des assemblages.
Divers :
Une multitude de moyens d’assemblages se sont développés, en particulière pour les
assemblages des structures légères. Citons de manière non exhaustive les clous ou
goujons à fixer au pistolet, les vis auto-taraudeuses, les rivets à sceller, les agrafes, les
boulons à chasser au marteau, etc [28].
1-3 Fonctionnement des assemblages :
Les principaux modes d’assemblages correspondent à deux types de fonctionnement
distincts : obstacle et/ou adhérence [24].
a- Fonctionnement par obstacle :
C’est le cas des boulons ordinaires, non précontraints, dont les tiges reprennent les efforts et
fonctionnent en cisaillement.
b- Fonctionnement par adhérence :
Dans ce cas, la transmission des efforts s’opère par adhérence des surfaces des pièces en
contact. Cela concerne le soudage, le collage, le boulonnage par boulon HR.
CHAPITRE1 : Synthèse bibliographiques
31
c- Fonctionnement mixte :
C’est le cas du rivetage (et dans les cas extrêmes, du boulonnage HR), à savoir que les rivets
assurent la transmission des efforts par adhérence des pièces jusqu’à une certaine limite, qui
lorsqu’elle est dépassée, fait intervenir les rivets par obstacle, au cisaillement.
1-4 Critères de choix des moyens d’assemblages :
D’une manière générale, le choix entre les divers moyens disponible pour assembler les
éléments d’une ossature métalliques est le résultat de la prise en compte de critères multiples
[23]:
- Critères structurels : résistance, comportement…
- Critères de fabrication : faisabilité, maîtrise des tolérances….
- Critères propres au montage sur site : faisabilité, possibilité de réglage…
- Critères économiques.
Le recours à une solution entièrement soudée et assez exceptionnel dans la mesure où l’on
cherche en principe à éviter le soudage sur site en raison de protection contre les intempéries
(vent, pluie, froid...) que cette opération nécessites. Le plus souvent, on fabrique donc en
atelier des composants de taille transportable, qui sont ensuite assemblés sur chantier par des
joins boulonnés. Ces composants peuvent eux-mêmes comporter des assemblages :
l’utilisation du soudage peut alors être retenue sans difficulté particulière, généralement en
fonction de simples critères de productivité. Il est important de noter que, dans tous les cas, le
soudage constitue la seule technique d’assemblage qui permette de reconstituer parfaitement
le monolithisme structurel entre éléments solidarisés tel qu’il est escompté par les calculs.
En matière d’assemblage boulonnés, les boulons normaux non précontraints permettent, dans
le domaine du bâtiment, de satisfaire sans difficulté aux exigences techniques courantes.
Différentes situations peuvent néanmoins être rencontrées où ses produits ne sont plus
adaptés.
1-5 Les différentes configurations d’assemblages poutre-poteau :
1-5-1 Les assemblages boulonnés :
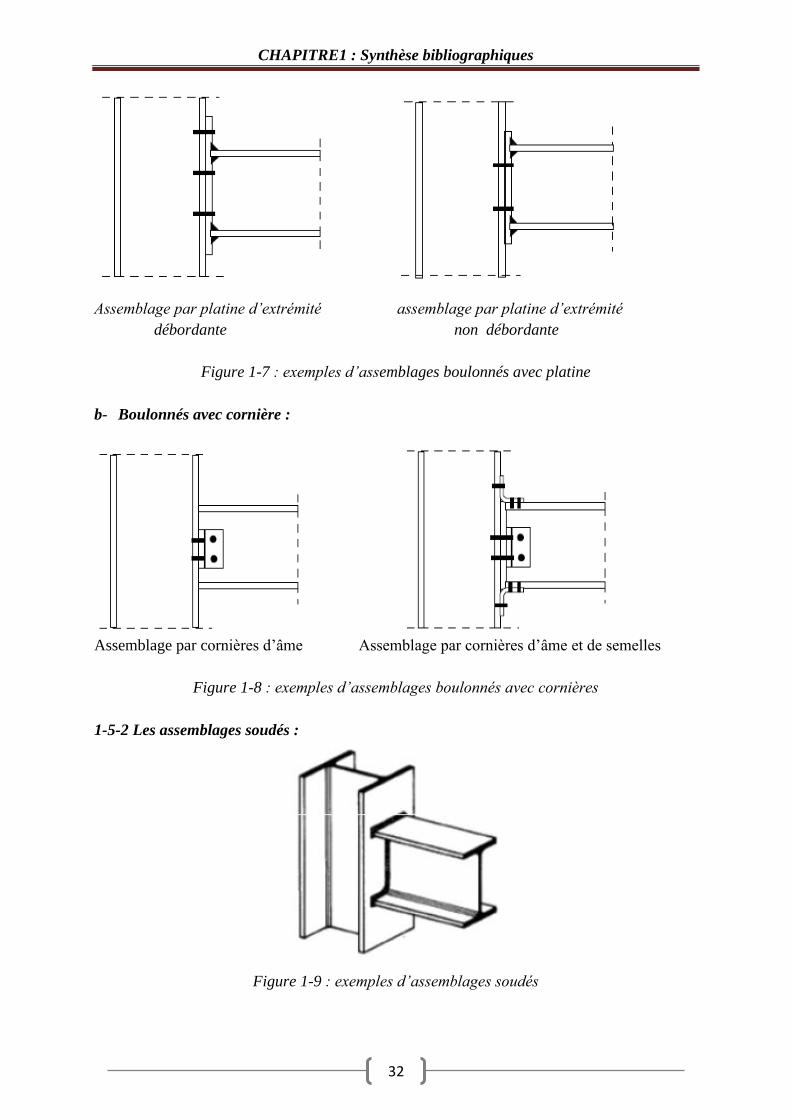
a- Boulonnés avec platine :
CHAPITRE1 : Synthèse bibliographiques
32
Assemblage par platine d’extrémité assemblage par platine d’extrémité
débordante non débordante
Figure 1-7 : exemples d’assemblages boulonnés avec platine
b- Boulonnés avec cornière :
Assemblage par cornières d’âme Assemblage par cornières d’âme et de semelles
Figure 1-8 : exemples d’assemblages boulonnés avec cornières
1-5-2 Les assemblages soudés :
Figure 1-9 : exemples d’assemblages soudés
CHAPITRE1 : Synthèse bibliographiques
33
1-6 Caractérisation du comportement des assemblages poutre-poteau :
Les caractéristiques mécaniques d’un assemblage en rotation peuvent être décrites par une
courbe de comportement Mj -ɸ (moment-rotation). Trois catégories de méthodes de
caractérisation du comportement d’un assemblage sont souvent mentionnées [1]:
- Les travaux expérimentaux : permettent d’étudier le comportement de
l’assemblage à l’échelle réel.
- Les approches numériques : permettent d’analyser le comportement de
l’assemblage au travers de simulation numérique, le plus souvent aux éléments finis.
- Les méthodes analytiques : abordent le comportement de l’assemblage sous une
analyse plus souvent théorique, parfois empirique.
Lors de l’analyse structurale, les assemblages entre les éléments structuraux sont
traditionnellement modélisés comme rigides ou articulés. Les nœuds articulés ne transmettent
aucun moment de flexion et n’empêchent pas la rotation des éléments assemblés. Quant aux
nœuds rigides, ils interdisent toute rotation relative entre les éléments assemblés et assurent
ainsi la transmission intégrale des efforts appliqués.
Toutefois, le comportement réel des assemblages est situé entre les deux cas extrêmes,
généralement supposés rigides ou articulés. Les assemblages les plus flexibles sont capables
de transmettre un certain moment de flexion tandis que les assemblages les plus rigides
autorisent toujours une certaine rotation relative des pièces assemblées. L’acceptation de cette
réalité a conduit à l’introduction du concept de la semi-rigidité dans les approches de calcul et
de dimensionnement des structures. Ce concept permet de tenir compte du comportement réel
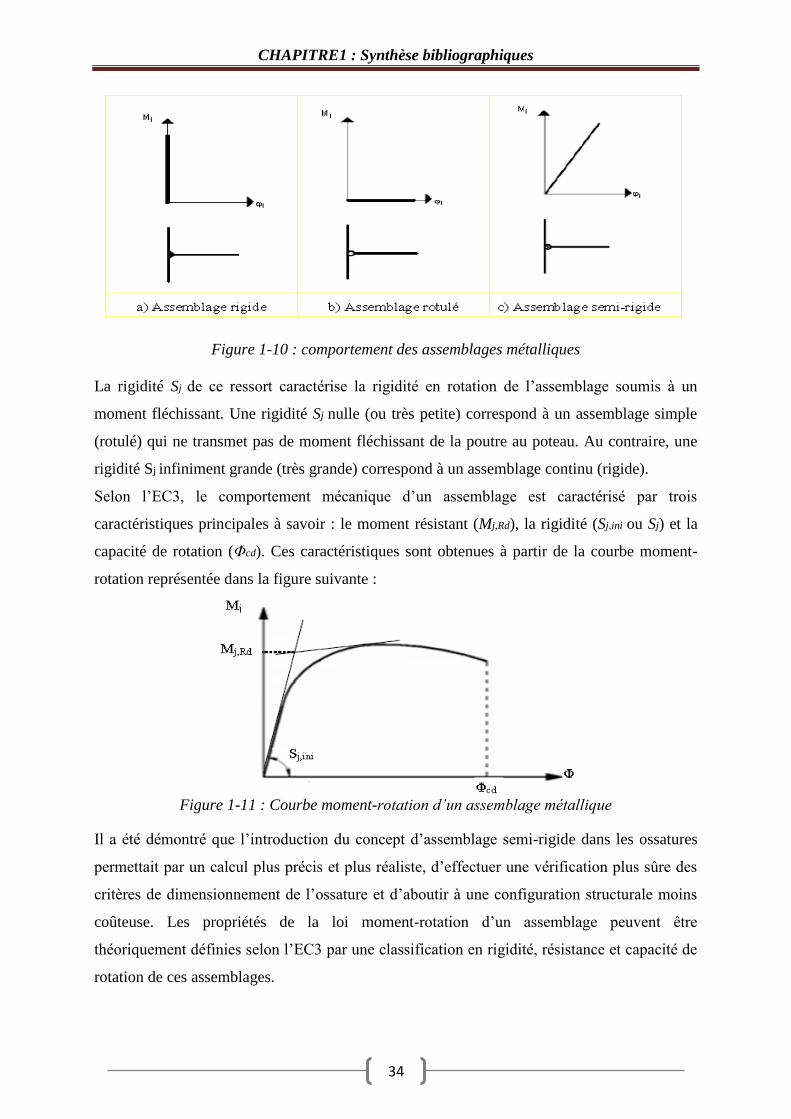
de l'assemblage situé entre l’articulation et l’encastrement (Figure1-10).
Il est modélisé au moyen d’un ressort en rotation placé au point d’intersection entre les axes
de la poutre et du poteau.
CHAPITRE1 : Synthèse bibliographiques
34
Figure 1-10 : comportement des assemblages métalliques
La rigidité Sj de ce ressort caractérise la rigidité en rotation de l’assemblage soumis à un
moment fléchissant. Une rigidité Sj nulle (ou très petite) correspond à un assemblage simple
(rotulé) qui ne transmet pas de moment fléchissant de la poutre au poteau. Au contraire, une
rigidité Sj infiniment grande (très grande) correspond à un assemblage continu (rigide).
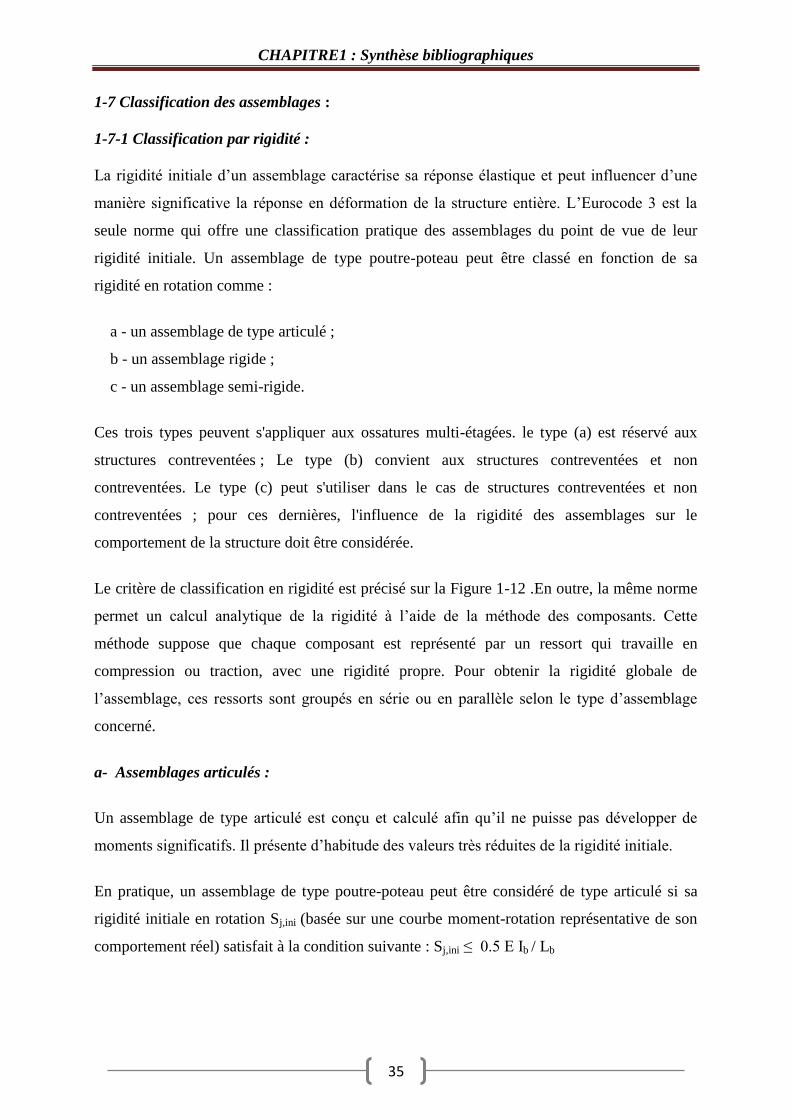
Selon l’EC3, le comportement mécanique d’un assemblage est caractérisé par trois
caractéristiques principales à savoir : le moment résistant (Mj,Rd), la rigidité (Sj,ini ou Sj) et la
capacité de rotation (Φcd). Ces caractéristiques sont obtenues à partir de la courbe moment-
rotation représentée dans la figure suivante :
Figure 1-11 : Courbe moment-rotation d’un assemblage métallique
Il a été démontré que l’introduction du concept d’assemblage semi-rigide dans les ossatures
permettait par un calcul plus précis et plus réaliste, d’effectuer une vérification plus sûre des
critères de dimensionnement de l’ossature et d’aboutir à une configuration structurale moins
coûteuse. Les propriétés de la loi moment-rotation d’un assemblage peuvent être
théoriquement définies selon l’EC3 par une classification en rigidité, résistance et capacité de
rotation de ces assemblages.
CHAPITRE1 : Synthèse bibliographiques
35
1-7 Classification des assemblages :
1-7-1 Classification par rigidité :
La rigidité initiale d’un assemblage caractérise sa réponse élastique et peut influencer d’une
manière significative la réponse en déformation de la structure entière. L’Eurocode 3 est la
seule norme qui offre une classification pratique des assemblages du point de vue de leur
rigidité initiale. Un assemblage de type poutre-poteau peut être classé en fonction de sa
rigidité en rotation comme :
a - un assemblage de type articulé ;
b - un assemblage rigide ;
c - un assemblage semi-rigide.
Ces trois types peuvent s'appliquer aux ossatures multi-étagées. le type (a) est réservé aux
structures contreventées ; Le type (b) convient aux structures contreventées et non
contreventées. Le type (c) peut s'utiliser dans le cas de structures contreventées et non
contreventées ; pour ces dernières, l'influence de la rigidité des assemblages sur le
comportement de la structure doit être considérée.
Le critère de classification en rigidité est précisé sur la Figure 1-12 .En outre, la même norme
permet un calcul analytique de la rigidité à l’aide de la méthode des composants. Cette
méthode suppose que chaque composant est représenté par un ressort qui travaille en
compression ou traction, avec une rigidité propre. Pour obtenir la rigidité globale de
l’assemblage, ces ressorts sont groupés en série ou en parallèle selon le type d’assemblage
concerné.
a- Assemblages articulés :
Un assemblage de type articulé est conçu et calculé afin qu’il ne puisse pas développer de
moments significatifs. Il présente d’habitude des valeurs très réduites de la rigidité initiale.
En pratique, un assemblage de type poutre-poteau peut être considéré de type articulé si sa
rigidité initiale en rotation Sj,ini (basée sur une courbe moment-rotation représentative de son
comportement réel) satisfait à la condition suivante : Sj,ini ≤ 0.5 E Ib / Lb
CHAPITRE1 : Synthèse bibliographiques
36
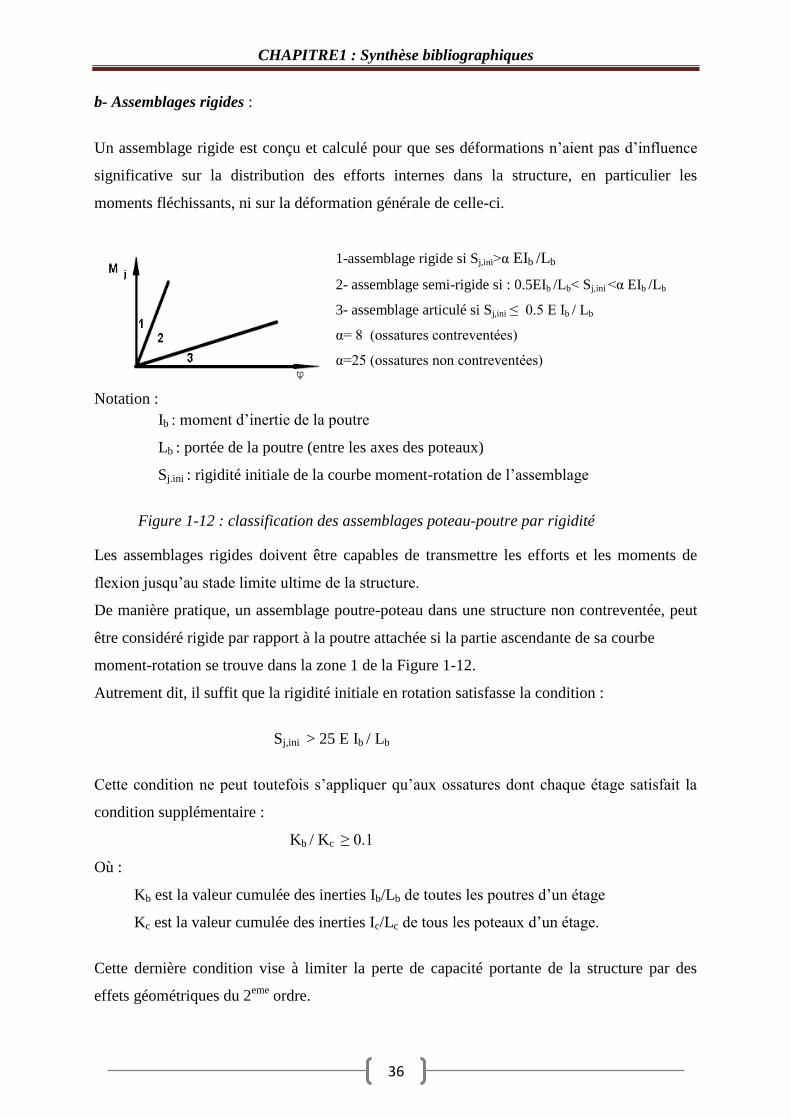
b- Assemblages rigides :
Un assemblage rigide est conçu et calculé pour que ses déformations n’aient pas d’influence
significative sur la distribution des efforts internes dans la structure, en particulier les
moments fléchissants, ni sur la déformation générale de celle-ci.
Notation :
Ib : moment d’inertie de la poutre
Lb : portée de la poutre (entre les axes des poteaux)
Sj.ini : rigidité initiale de la courbe moment-rotation de l’assemblage
Figure 1-12 : classification des assemblages poteau-poutre par rigidité
Les assemblages rigides doivent être capables de transmettre les efforts et les moments de
flexion jusqu’au stade limite ultime de la structure.
De manière pratique, un assemblage poutre-poteau dans une structure non contreventée, peut
être considéré rigide par rapport à la poutre attachée si la partie ascendante de sa courbe
moment-rotation se trouve dans la zone 1 de la Figure 1-12.
Autrement dit, il suffit que la rigidité initiale en rotation satisfasse la condition :
Sj,ini > 25 E Ib / Lb
Cette condition ne peut toutefois s’appliquer qu’aux ossatures dont chaque étage satisfait la
condition supplémentaire :
Kb / Kc ≥ 0.1
Où :
Kb est la valeur cumulée des inerties Ib/Lb de toutes les poutres d’un étage
Kc est la valeur cumulée des inerties Ic/Lc de tous les poteaux d’un étage.
Cette dernière condition vise à limiter la perte de capacité portante de la structure par des
effets géométriques du 2eme
ordre.
1-assemblage rigide si Sj,ini>α EIb /Lb
2- assemblage semi-rigide si : 0.5EIb /Lb< Sj,ini <α EIb /Lb
3- assemblage articulé si Sj,ini ≤ 0.5 E Ib / Lb
α= 8 (ossatures contreventées)
α=25 (ossatures non contreventées)
CHAPITRE1 : Synthèse bibliographiques
37
c- Assemblages semi-rigides :
Un assemblage qui ne répond pas au critère des assemblages rigides, ni à celui des
assemblages de type articulé, donnés en a et b, doit être considéré comme un assemblage
semi-rigide. Les assemblages semi-rigides conduisent nécessairement à une interaction entre
les déformations des assemblages et les efforts dans les éléments, interaction qu’il convient de
prévoir en tenant compte de la courbe de calcul moment-rotation des assemblages.
Les assemblages semi-rigides doivent être capables de transmettre les forces et les moments
de flexion jusqu’à l’état ultime de la structure.
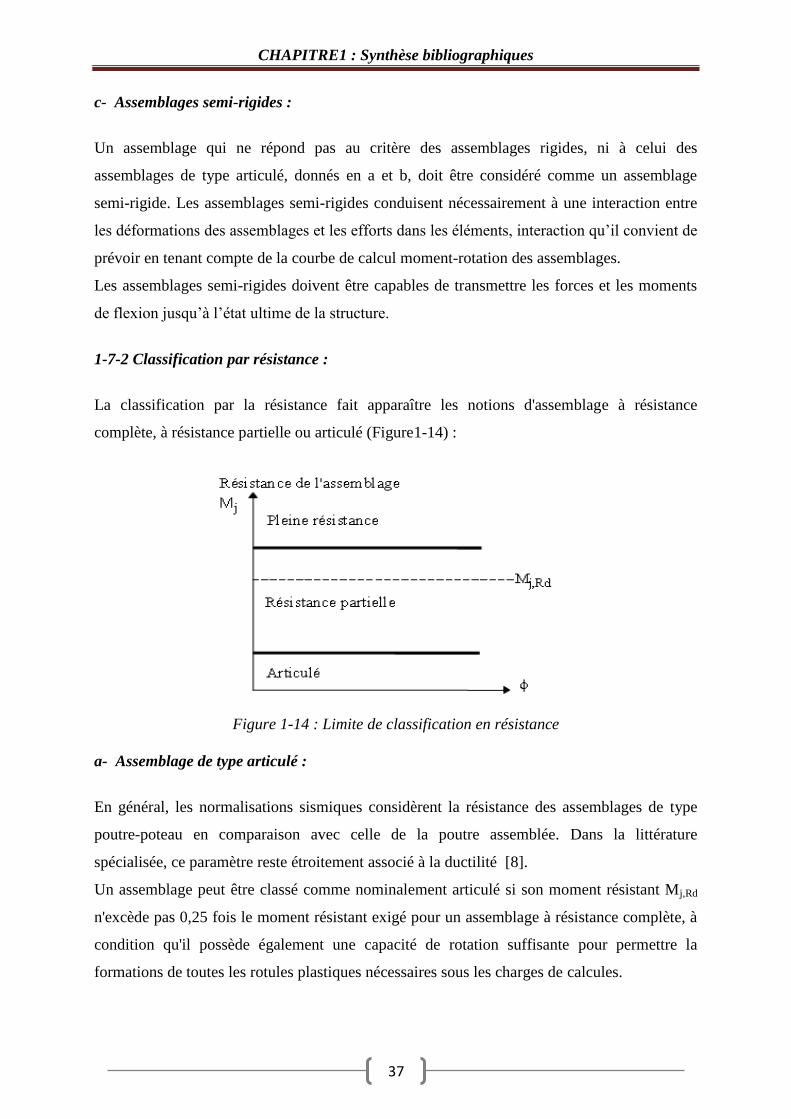
1-7-2 Classification par résistance :
La classification par la résistance fait apparaître les notions d'assemblage à résistance
complète, à résistance partielle ou articulé (Figure1-14) :
Figure 1-14 : Limite de classification en résistance
a- Assemblage de type articulé :
En général, les normalisations sismiques considèrent la résistance des assemblages de type
poutre-poteau en comparaison avec celle de la poutre assemblée. Dans la littérature
spécialisée, ce paramètre reste étroitement associé à la ductilité [8].
Un assemblage peut être classé comme nominalement articulé si son moment résistant Mj,Rd
n'excède pas 0,25 fois le moment résistant exigé pour un assemblage à résistance complète, à
condition qu'il possède également une capacité de rotation suffisante pour permettre la
formations de toutes les rotules plastiques nécessaires sous les charges de calcules.

CHAPITRE1 : Synthèse bibliographiques
38
b- Assemblage à résistance complète :
On peut considérer qu’un assemblage est à résistance complète si sa résistance de calcule est
au moins égale à la plus grande des résistances des éléments structuraux connectés.
Si la capacité de rotation d’un assemblage à résistance complète est limitée, les effets d’un
dépassement éventuel de cette résistance doivent être prise en compte, si la résistance de
calcule d’un assemblage est égale à au moins 1.2 fois la résistance plastique de calcule de
l’élément structural, il n’est pas nécessaire de vérifier sa capacité de rotation.
Figure 1-15 : Assemblages à pleine résistance
c- Assemblage à résistance partielle :
La résistance d’un assemblage à résistance partielle est par définition inférieure à celle de
l’élément structural assemblé. La capacité de rotation d’un assemblage à résistance partielle
au droit duquel se forme une rotule plastique doit être suffisante pour permettre le
développement de toutes les rotules plastiques nécessaires sous les charges de calcul.
La capacité des rotations peut être démontrée expérimentalement, cette démonstration
expérimentale n’est pas risque lorsque l’on utilise des dispositions constructives dont la
pratique à démontré qu’elle avait les propriétés adéquates.
1-7-3 Classification par ductilité :
Les assemblages peuvent être classifiés en fonction de leur ductilité ou capacité de rotation.
Cette classification constitue une mesure de leur aptitude à résister à une rupture fragile ou à
instabilité locale prématurée. Une application pratique de cette classification des assemblages
consiste à vérifier si une analyse globale plastique peut être conduite jusqu'à la formation d'un
mécanisme d'effondrement plastique dans la structure pouvant impliquer des rotules
CHAPITRE1 : Synthèse bibliographiques
39
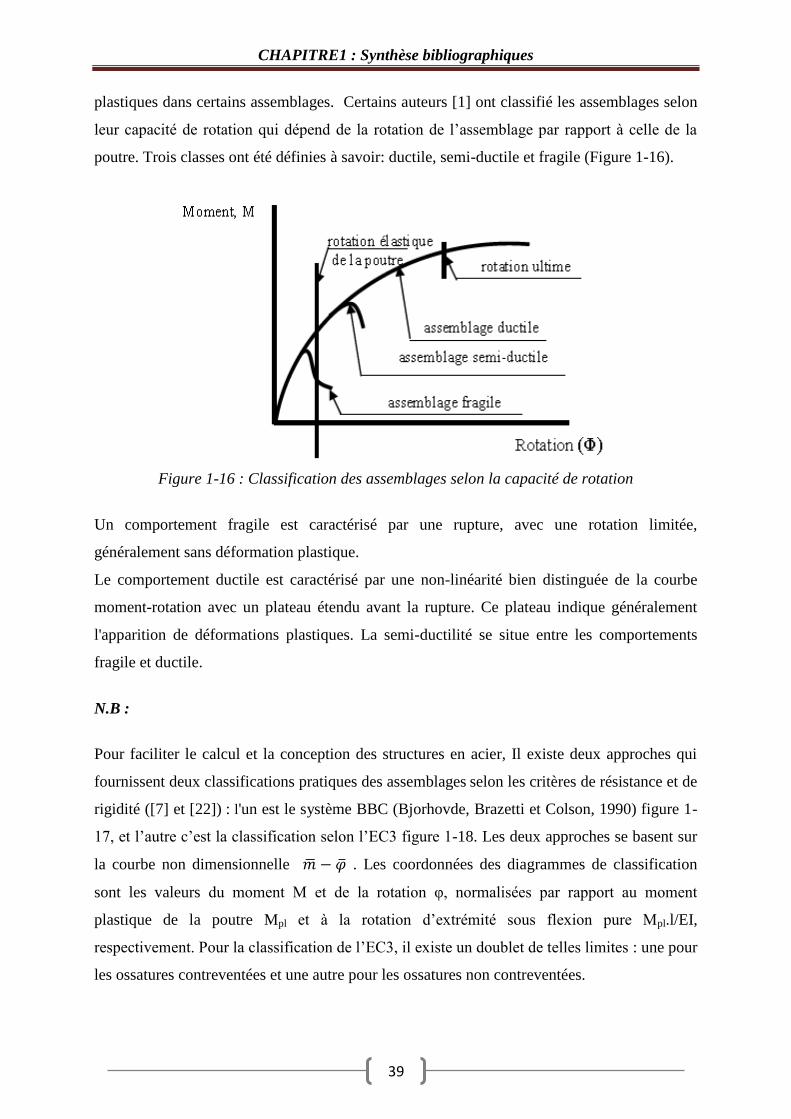
plastiques dans certains assemblages. Certains auteurs [1] ont classifié les assemblages selon
leur capacité de rotation qui dépend de la rotation de l’assemblage par rapport à celle de la
poutre. Trois classes ont été définies à savoir: ductile, semi-ductile et fragile (Figure 1-16).
Figure 1-16 : Classification des assemblages selon la capacité de rotation
Un comportement fragile est caractérisé par une rupture, avec une rotation limitée,
généralement sans déformation plastique.
Le comportement ductile est caractérisé par une non-linéarité bien distinguée de la courbe
moment-rotation avec un plateau étendu avant la rupture. Ce plateau indique généralement
l'apparition de déformations plastiques. La semi-ductilité se situe entre les comportements
fragile et ductile.
N.B :
Pour faciliter le calcul et la conception des structures en acier, Il existe deux approches qui
fournissent deux classifications pratiques des assemblages selon les critères de résistance et de
rigidité ([7] et [22]) : l'un est le système BBC (Bjorhovde, Brazetti et Colson, 1990) figure 1-
17, et l’autre c’est la classification selon l’EC3 figure 1-18. Les deux approches se basent sur
la courbe non dimensionnelle . Les coordonnées des diagrammes de classification
sont les valeurs du moment M et de la rotation φ, normalisées par rapport au moment
plastique de la poutre Mpl et à la rotation d’extrémité sous flexion pure Mpl.l/EI,
respectivement. Pour la classification de l’EC3, il existe un doublet de telles limites : une pour
les ossatures contreventées et une autre pour les ossatures non contreventées.
CHAPITRE1 : Synthèse bibliographiques
40
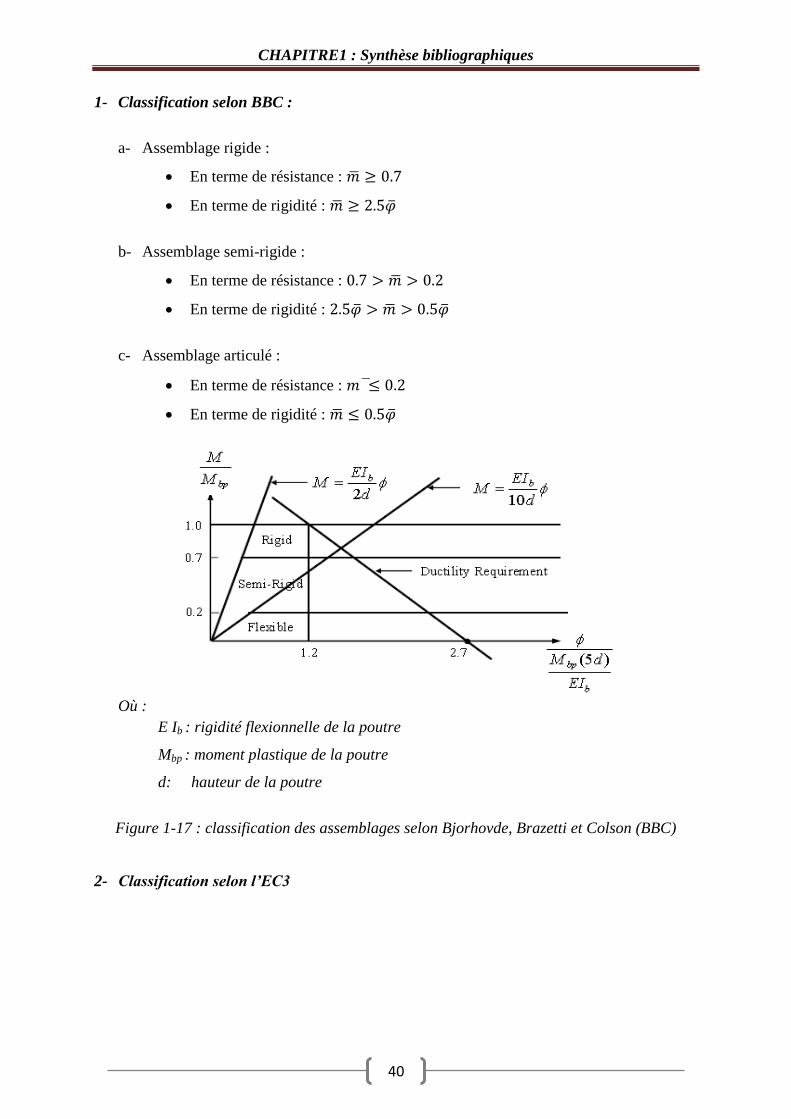
1- Classification selon BBC :
a- Assemblage rigide :
En terme de résistance :
En terme de rigidité :
b- Assemblage semi-rigide :
En terme de résistance :
En terme de rigidité :
c- Assemblage articulé :
En terme de résistance :
En terme de rigidité :
Où :
E Ib : rigidité flexionnelle de la poutre
Mbp : moment plastique de la poutre
d: hauteur de la poutre
Figure 1-17 : classification des assemblages selon Bjorhovde, Brazetti et Colson (BBC)
2- Classification selon l’EC3
CHAPITRE1 : Synthèse bibliographiques
41
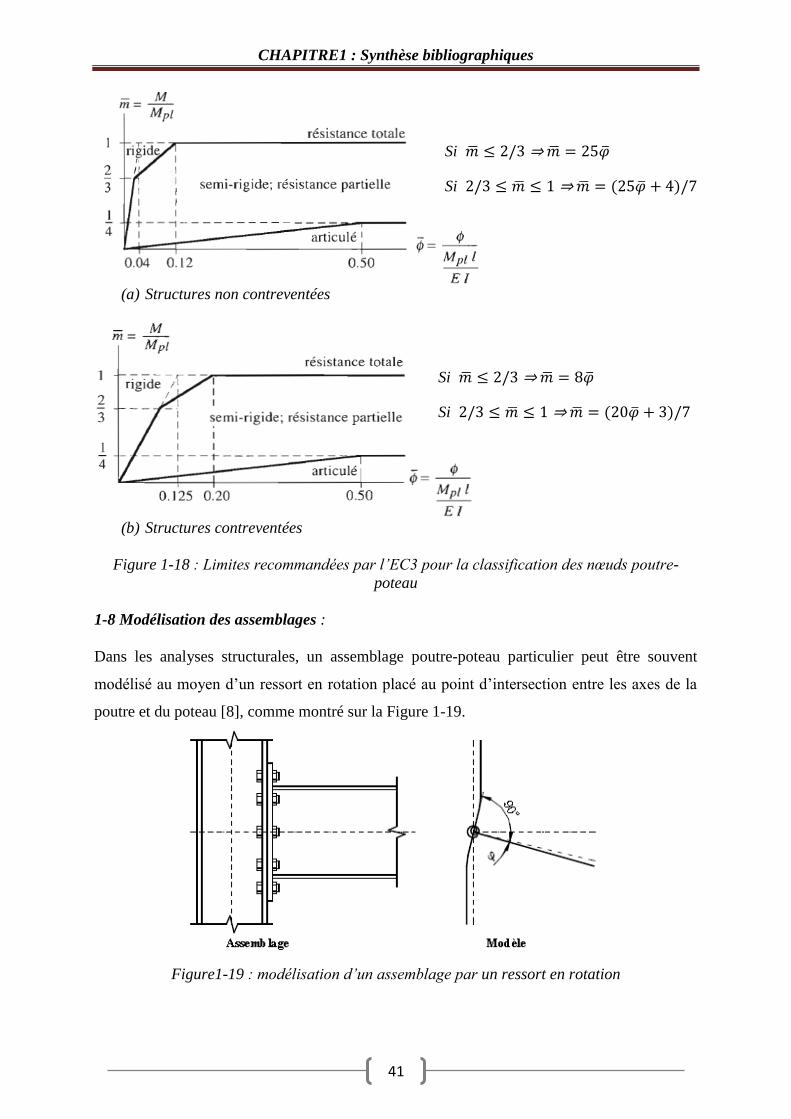
(a) Structures non contreventées
(b) Structures contreventées
Figure 1-18 : Limites recommandées par l’EC3 pour la classification des nœuds poutre-
poteau
1-8 Modélisation des assemblages :
Dans les analyses structurales, un assemblage poutre-poteau particulier peut être souvent
modélisé au moyen d’un ressort en rotation placé au point d’intersection entre les axes de la
poutre et du poteau [8], comme montré sur la Figure 1-19.
Figure1-19 : modélisation d’un assemblage par un ressort en rotation
Si ⇒
Si ⇒
Si ⇒
Si ⇒
CHAPITRE1 : Synthèse bibliographiques
42
Le choix du modèle d’assemblage en vu de calcule d’une structure aura une influence sur sa
modélisation. Il doit en effet, y avoir une cohérence entre la modélisation de l’ossature et le
comportement des assemblages [11]. Ainsi, au trois modélisations possibles en structure
réticulée, continue et semi-continue doivent correspondre, respectivement, des modèles
d’assemblage articulés, rigides et semi-rigide. Les assemblages représentés comme rigides ou
articulés dans l’analyse doivent être calculés de sorte à satisfaire à la classification basée sur
la rigidité. Le modèle semi-rigide peut être représenté par un ressort en rotation plus au moins
sophistiqué.
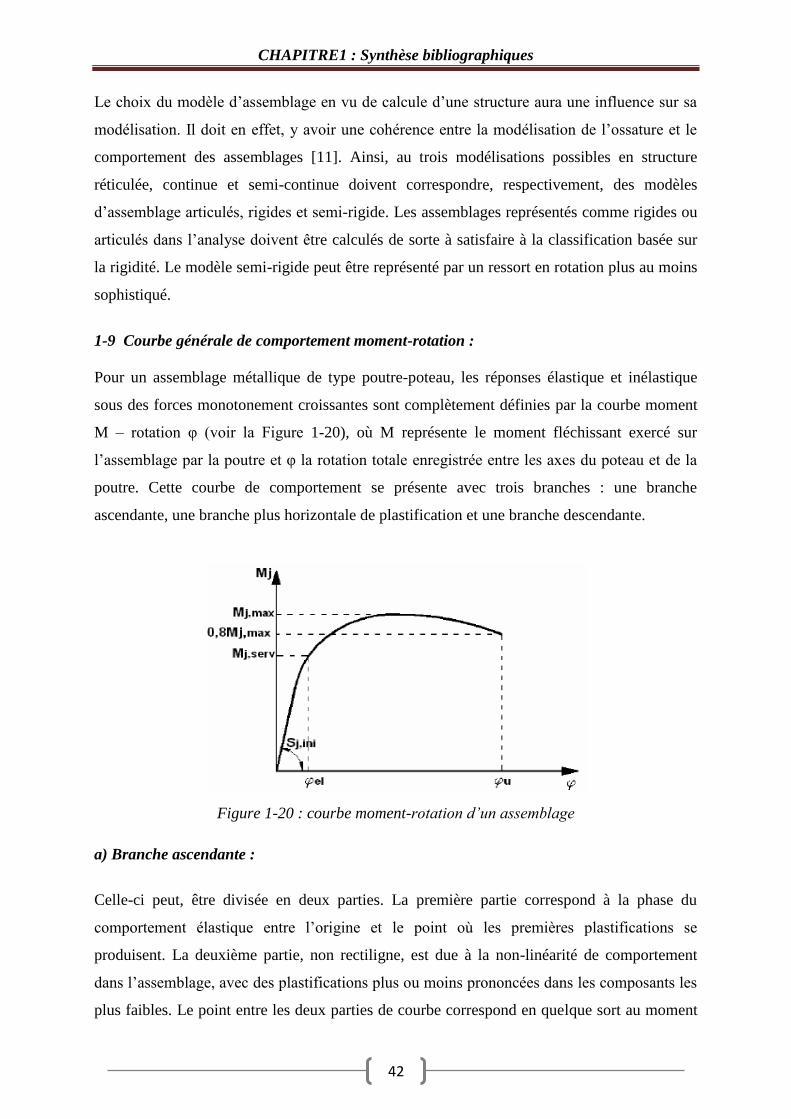
1-9 Courbe générale de comportement moment-rotation :
Pour un assemblage métallique de type poutre-poteau, les réponses élastique et inélastique
sous des forces monotonement croissantes sont complètement définies par la courbe moment
M – rotation φ (voir la Figure 1-20), où M représente le moment fléchissant exercé sur
l’assemblage par la poutre et φ la rotation totale enregistrée entre les axes du poteau et de la
poutre. Cette courbe de comportement se présente avec trois branches : une branche
ascendante, une branche plus horizontale de plastification et une branche descendante.
Figure 1-20 : courbe moment-rotation d’un assemblage
a) Branche ascendante :
Celle-ci peut, être divisée en deux parties. La première partie correspond à la phase du
comportement élastique entre l’origine et le point où les premières plastifications se
produisent. La deuxième partie, non rectiligne, est due à la non-linéarité de comportement
dans l’assemblage, avec des plastifications plus ou moins prononcées dans les composants les
plus faibles. Le point entre les deux parties de courbe correspond en quelque sort au moment
CHAPITRE1 : Synthèse bibliographiques
43
limite de service de l’assemblage Mj,serv. La rigidité Sj,ini de la première partie de courbe,
représente un paramètre important du comportement de l’assemblage dans la mesure où il
peut influencer le comportement structural global.
b) Branche plastique :
Cette partie de la courbe tend à devenir horizontale et représente le plein développement des
plastifications dans l’assemblage. Cela se traduit par des plastifications successives dans ses
divers composants. Le palier plastique peut être plus ou moins long, en fonction de plusieurs
paramètres : le type d’assemblage, la nature du matériau des composants, le mode de
chargement de l’assemblage etc.
Dans l’intervalle de rotation qui peut définir le palier plastique, la valeur de la résistance
maximale de l’assemblage est atteinte pour une valeur Mj,max.
c) Pente descendante :
Elle traduit l’approche de la ruine de l’assemblage et permet souvent de définir une ductilité
convenable de celui-ci. La valeur ultime de la rotation φu doit représenter une valeur pour
laquelle l’assemblage reste fonctionnel et résiste encore à des valeurs significatives du
moment. Une définition usuelle pour φu en dimensionnement sismique est donnée par
l’intersection du graphique de la courbe avec la ligne horizontale qui correspond à 0,8Mj,max.
Ainsi, on a la garantie qu’au stade ultime, l’assemblage résiste à 80% de sa capacité
maximale. La ductilité en rotation d’un assemblage (au sens d’un chargement statique) est
donnée par la relation :
1-10 Idéalisations de courbes Moment-Rotation de l'assemblage :
Le comportement moment-rotation des assemblages est généralement décrit à l'aide d'une
courbe non-linéaire. Cependant, l'utilisation de ce type de courbes demande des programmes
d'analyse de structures sophistiqués.
Afin de permettre un calcul simple des structures, les courbes moment-rotation des
assemblages peuvent être idéalisées, selon l'EC3, par des modèles tri linéaires, bilinéaires ou
linéaires. Le choix d'une idéalisation est lié à la méthode d'analyse utilisée et aux outils de
CHAPITRE1 : Synthèse bibliographiques
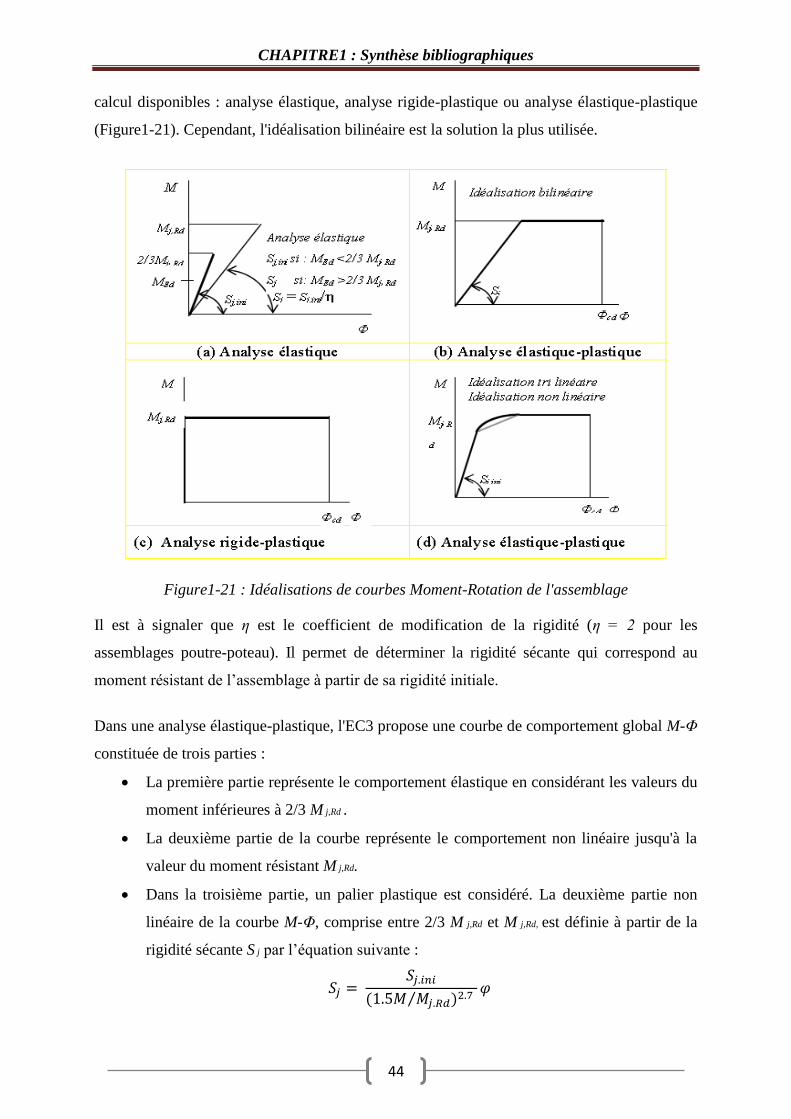
44
calcul disponibles : analyse élastique, analyse rigide-plastique ou analyse élastique-plastique
(Figure1-21). Cependant, l'idéalisation bilinéaire est la solution la plus utilisée.
Figure1-21 : Idéalisations de courbes Moment-Rotation de l'assemblage
Il est à signaler que η est le coefficient de modification de la rigidité (η = 2 pour les
assemblages poutre-poteau). Il permet de déterminer la rigidité sécante qui correspond au
moment résistant de l’assemblage à partir de sa rigidité initiale.
Dans une analyse élastique-plastique, l'EC3 propose une courbe de comportement global M-Φ
constituée de trois parties :
La première partie représente le comportement élastique en considérant les valeurs du
moment inférieures à 2/3 M j,Rd .
La deuxième partie de la courbe représente le comportement non linéaire jusqu'à la
valeur du moment résistant M j,Rd.
Dans la troisième partie, un palier plastique est considéré. La deuxième partie non
linéaire de la courbe M-Φ, comprise entre 2/3 M j,Rd et M j,Rd, est définie à partir de la
rigidité sécante S j par l’équation suivante :
CHAPITRE1 : Synthèse bibliographiques
45
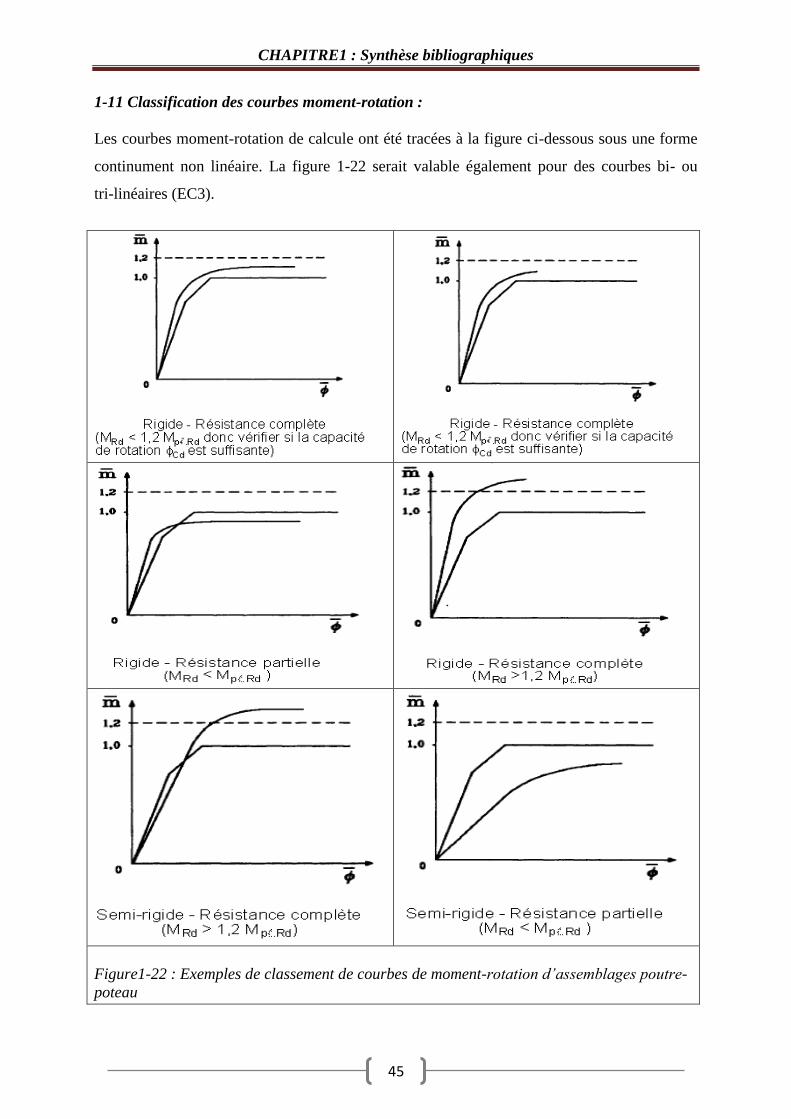
1-11 Classification des courbes moment-rotation :
Les courbes moment-rotation de calcule ont été tracées à la figure ci-dessous sous une forme
continument non linéaire. La figure 1-22 serait valable également pour des courbes bi- ou
tri-linéaires (EC3).
Figure1-22 : Exemples de classement de courbes de moment-rotation d’assemblages poutre-
poteau
CHAPITRE1 : Synthèse bibliographiques
46
1-12 Renforcement d’assemblages :
L'assemblage par platine d’about est largement utilisé dans les structures métalliques et sa
popularité est attribuée à la simplicité et l'économie de sa fabrication. Toutefois, ces
assemblages sont extrêmement complexes dans leur analyse et comportement structural
particulièrement quand ils sont soumis à des efforts très importants. Il convient donc d’être
particulièrement vigilant sur les détails de conception des assemblages car c’est en cet endroit
que se concentrent toutes les difficultés par suite de la présence de pièces intermédiaires.
De surcroit, ces zones à brusque changement de géométrie induisent des efforts localisés et
des concentrations de contraintes. Ainsi, des ajustements peuvent être faits à un assemblage
par platine d’about simple pour répondre aux exigences de différentes situations. Par exemple,
des raidisseurs de platine d’about peuvent être ajoutés pour augmenter la rigidité de la platine
et/ou sa résistance tout en réduisant son épaisseur. Trois moyens de renforcement sont
actuellement couverts dans l’EC3: les raidisseurs transversaux de poteau, les contre-plaques et
les doublures d'âme.
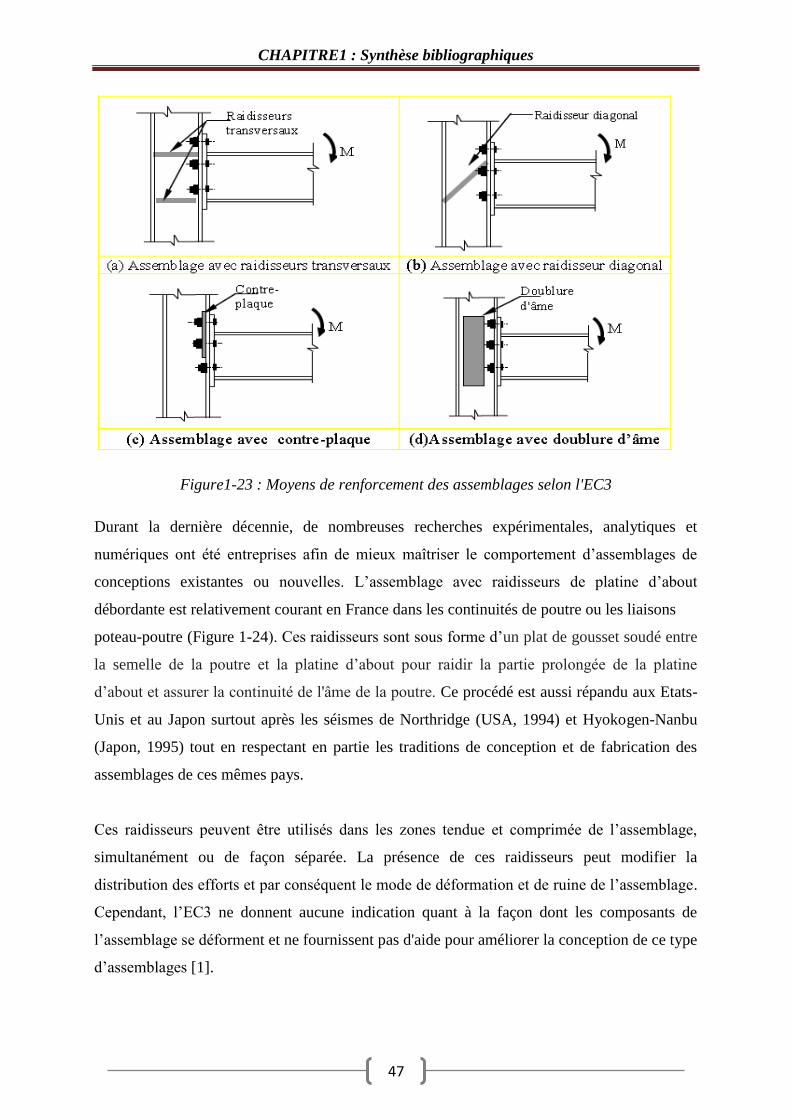
Les raidisseurs transversaux de poteau : Ils sont soudés, au niveau des semelles en
zones tendue et comprimée du poteau [Figure1-23(a)], pour augmenter la rigidité et la
résistance de l'âme du poteau en traction et en compression et de la semelle du poteau en
flexion. Des raidisseurs diagonaux peuvent être utilisés pour améliorer la résistance de
l'âme du poteau en cisaillement [Figure 1-23 (b)], en combinaison avec les raidisseurs
transversaux.
Les renforcements par contre-plaques : Ce sont des platines boulonnées contre la
semelle du poteau en recouvrant au moins deux rangées de boulons dans la zone tendue de
l'assemblage [Figure 1-23 (c)]. Elles permettent d’augmenter la résistance de la semelle du
poteau pour certains modes de ruine ainsi que la rigidité dans certains cas.
Les doublures d'âme : Une doublure d'âme, soudée sur tout son pourtour [Figure1-23(d)]
est utilisée pour augmenter la résistance de l'âme du poteau vis-à-vis de la traction, de la
compression et du cisaillement. Dans le cas où la largeur de la doublure est très grande,
des boulons sont nécessaires pour la solidariser à l'âme du poteau.
CHAPITRE1 : Synthèse bibliographiques
47
Figure1-23 : Moyens de renforcement des assemblages selon l'EC3
Durant la dernière décennie, de nombreuses recherches expérimentales, analytiques et
numériques ont été entreprises afin de mieux maîtriser le comportement d’assemblages de
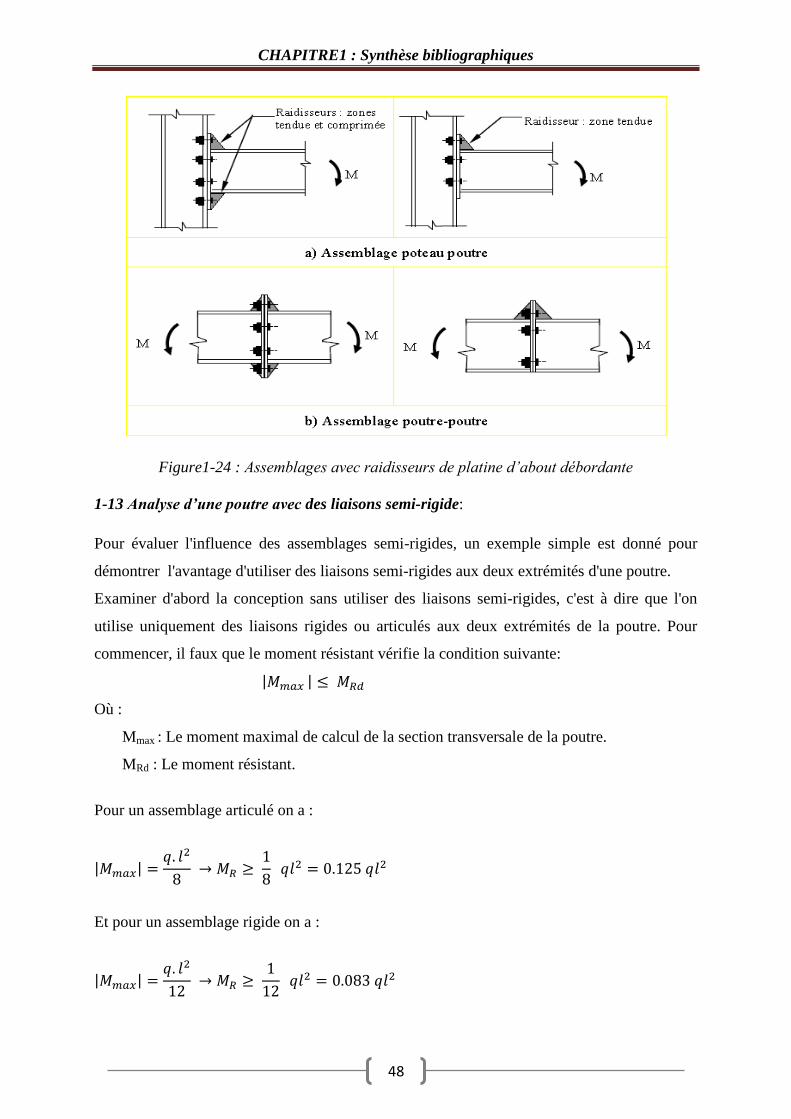
conceptions existantes ou nouvelles. L’assemblage avec raidisseurs de platine d’about
débordante est relativement courant en France dans les continuités de poutre ou les liaisons
poteau-poutre (Figure 1-24). Ces raidisseurs sont sous forme d’un plat de gousset soudé entre
la semelle de la poutre et la platine d’about pour raidir la partie prolongée de la platine
d’about et assurer la continuité de l'âme de la poutre. Ce procédé est aussi répandu aux Etats-
Unis et au Japon surtout après les séismes de Northridge (USA, 1994) et Hyokogen-Nanbu
(Japon, 1995) tout en respectant en partie les traditions de conception et de fabrication des
assemblages de ces mêmes pays.
Ces raidisseurs peuvent être utilisés dans les zones tendue et comprimée de l’assemblage,
simultanément ou de façon séparée. La présence de ces raidisseurs peut modifier la
distribution des efforts et par conséquent le mode de déformation et de ruine de l’assemblage.
Cependant, l’EC3 ne donnent aucune indication quant à la façon dont les composants de
l’assemblage se déforment et ne fournissent pas d'aide pour améliorer la conception de ce type
d’assemblages [1].
CHAPITRE1 : Synthèse bibliographiques
48
Figure1-24 : Assemblages avec raidisseurs de platine d’about débordante
1-13 Analyse d’une poutre avec des liaisons semi-rigide:
Pour évaluer l'influence des assemblages semi-rigides, un exemple simple est donné pour
démontrer l'avantage d'utiliser des liaisons semi-rigides aux deux extrémités d'une poutre.
Examiner d'abord la conception sans utiliser des liaisons semi-rigides, c'est à dire que l'on
utilise uniquement des liaisons rigides ou articulés aux deux extrémités de la poutre. Pour
commencer, il faux que le moment résistant vérifie la condition suivante:
Où :
Mmax : Le moment maximal de calcul de la section transversale de la poutre.
MRd : Le moment résistant.
Pour un assemblage articulé on a :
Et pour un assemblage rigide on a :
CHAPITRE1 : Synthèse bibliographiques
49
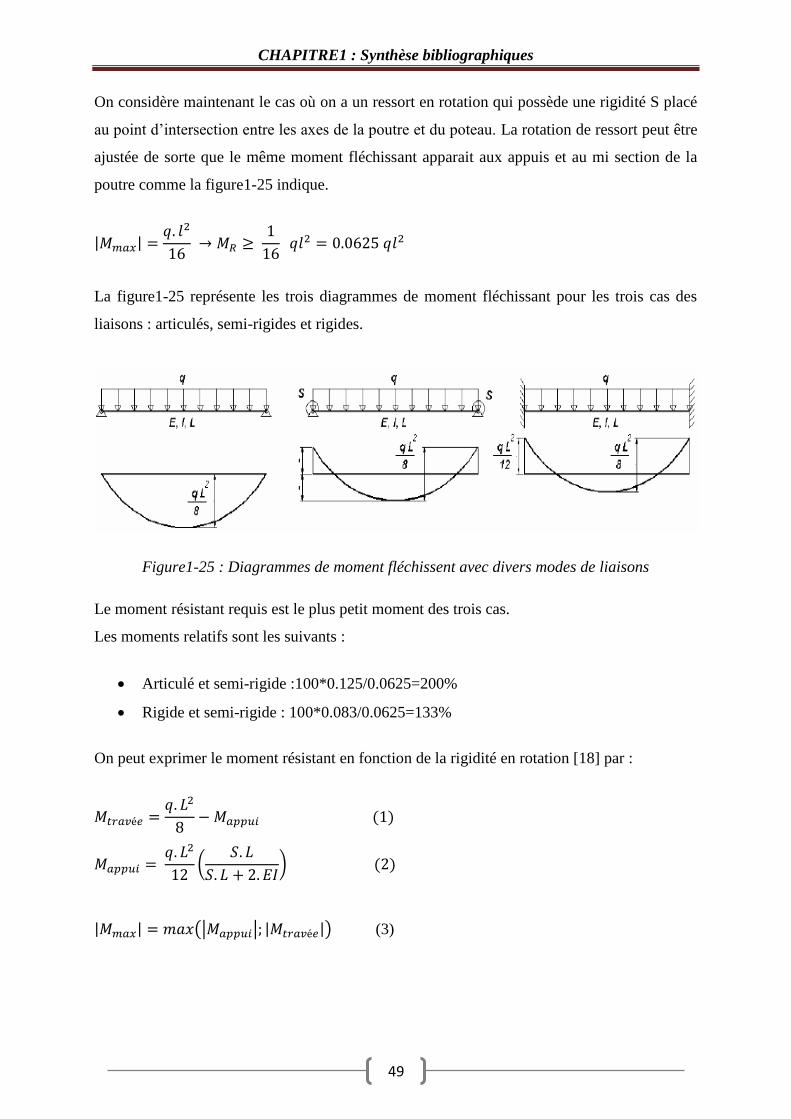
On considère maintenant le cas où on a un ressort en rotation qui possède une rigidité S placé
au point d’intersection entre les axes de la poutre et du poteau. La rotation de ressort peut être
ajustée de sorte que le même moment fléchissant apparait aux appuis et au mi section de la
poutre comme la figure1-25 indique.
La figure1-25 représente les trois diagrammes de moment fléchissant pour les trois cas des
liaisons : articulés, semi-rigides et rigides.
Figure1-25 : Diagrammes de moment fléchissent avec divers modes de liaisons
Le moment résistant requis est le plus petit moment des trois cas.
Les moments relatifs sont les suivants :
Articulé et semi-rigide :100*0.125/0.0625=200%
Rigide et semi-rigide : 100*0.083/0.0625=133%
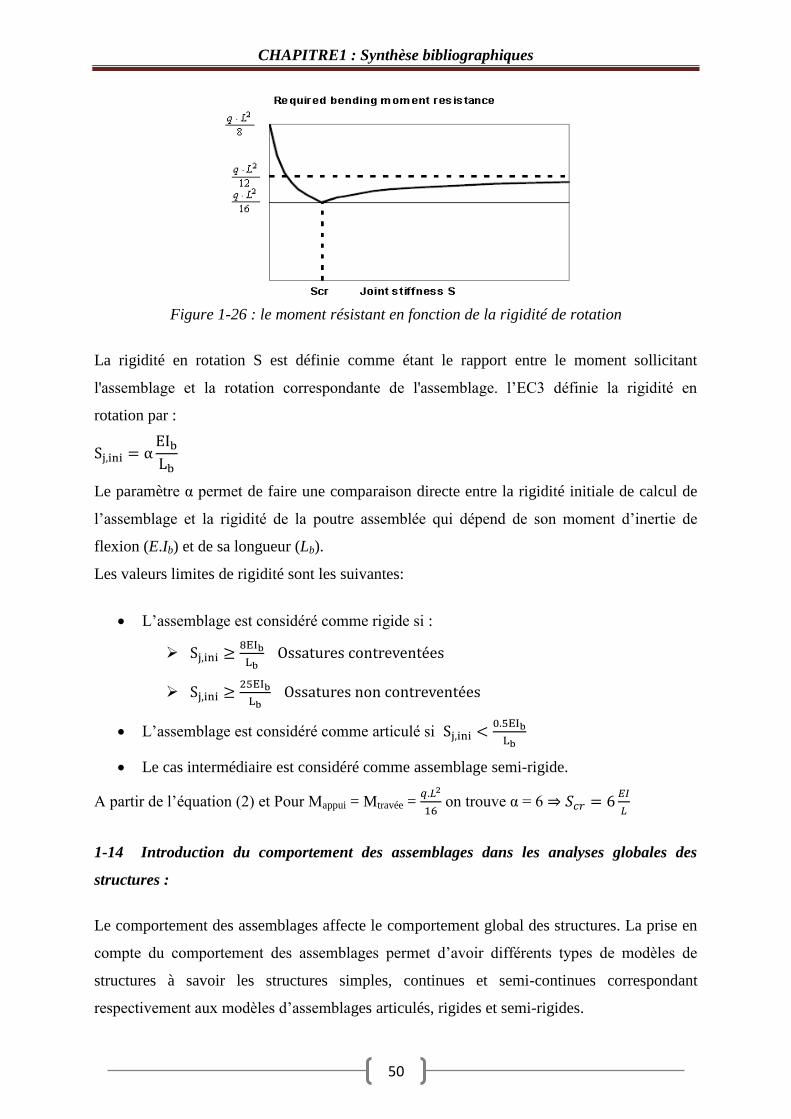
On peut exprimer le moment résistant en fonction de la rigidité en rotation [18] par :
(3)
CHAPITRE1 : Synthèse bibliographiques
50
Figure 1-26 : le moment résistant en fonction de la rigidité de rotation
La rigidité en rotation S est définie comme étant le rapport entre le moment sollicitant
l'assemblage et la rotation correspondante de l'assemblage. l’EC3 définie la rigidité en
rotation par :
Le paramètre α permet de faire une comparaison directe entre la rigidité initiale de calcul de
l’assemblage et la rigidité de la poutre assemblée qui dépend de son moment d’inertie de
flexion (E.Ib) et de sa longueur (Lb).
Les valeurs limites de rigidité sont les suivantes:
L’assemblage est considéré comme rigide si :
L’assemblage est considéré comme articulé si
Le cas intermédiaire est considéré comme assemblage semi-rigide.
A partir de l’équation (2) et Pour Mappui = Mtravée =
on trouve α = 6 ⇒
1-14 Introduction du comportement des assemblages dans les analyses globales des
structures :
Le comportement des assemblages affecte le comportement global des structures. La prise en
compte du comportement des assemblages permet d’avoir différents types de modèles de
structures à savoir les structures simples, continues et semi-continues correspondant
respectivement aux modèles d’assemblages articulés, rigides et semi-rigides.
CHAPITRE1 : Synthèse bibliographiques
51
Actuellement, dans la pratique courante, les assemblages sont considérés dans le calcul des
structures comme rigides ou articulés. A cet effet, ils doivent être calculés pour satisfaire les
classifications des assemblages rigides ou articulés. Réellement, les assemblages sont semi-
rigides. Ils peuvent être modélisés sous forme de ressorts en spirale présentant des relations
moment-rotation pouvant aller du type linéaire élastique au type non linéaire qui tient compte
de la capacité de rotation.
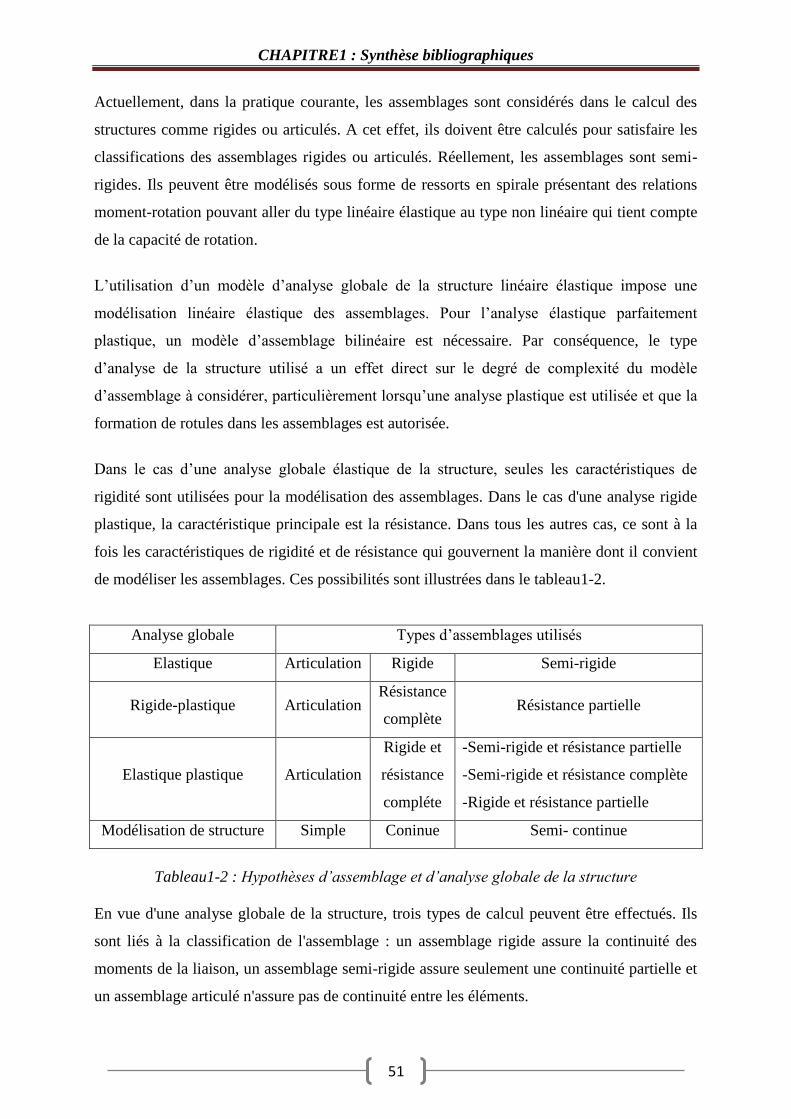
L’utilisation d’un modèle d’analyse globale de la structure linéaire élastique impose une
modélisation linéaire élastique des assemblages. Pour l’analyse élastique parfaitement
plastique, un modèle d’assemblage bilinéaire est nécessaire. Par conséquence, le type
d’analyse de la structure utilisé a un effet direct sur le degré de complexité du modèle
d’assemblage à considérer, particulièrement lorsqu’une analyse plastique est utilisée et que la
formation de rotules dans les assemblages est autorisée.
Dans le cas d’une analyse globale élastique de la structure, seules les caractéristiques de
rigidité sont utilisées pour la modélisation des assemblages. Dans le cas d'une analyse rigide
plastique, la caractéristique principale est la résistance. Dans tous les autres cas, ce sont à la
fois les caractéristiques de rigidité et de résistance qui gouvernent la manière dont il convient
de modéliser les assemblages. Ces possibilités sont illustrées dans le tableau1-2.
Analyse globale Types d’assemblages utilisés
Elastique Articulation Rigide Semi-rigide
Rigide-plastique Articulation Résistance
complète Résistance partielle
Elastique plastique Articulation
Rigide et
résistance
compléte
-Semi-rigide et résistance partielle
-Semi-rigide et résistance complète
-Rigide et résistance partielle
Modélisation de structure Simple Coninue Semi- continue
Tableau1-2 : Hypothèses d’assemblage et d’analyse globale de la structure
En vue d'une analyse globale de la structure, trois types de calcul peuvent être effectués. Ils
sont liés à la classification de l'assemblage : un assemblage rigide assure la continuité des
moments de la liaison, un assemblage semi-rigide assure seulement une continuité partielle et
un assemblage articulé n'assure pas de continuité entre les éléments.
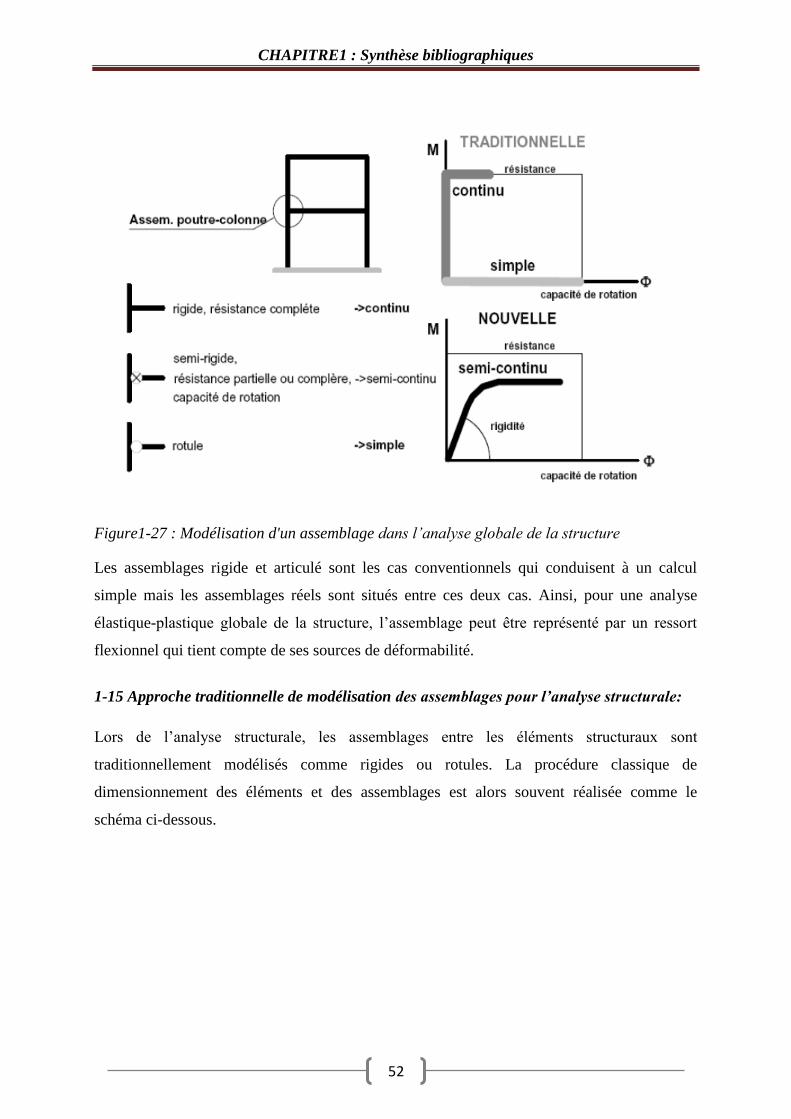
CHAPITRE1 : Synthèse bibliographiques
52
Figure1-27 : Modélisation d'un assemblage dans l’analyse globale de la structure
Les assemblages rigide et articulé sont les cas conventionnels qui conduisent à un calcul
simple mais les assemblages réels sont situés entre ces deux cas. Ainsi, pour une analyse
élastique-plastique globale de la structure, l’assemblage peut être représenté par un ressort
flexionnel qui tient compte de ses sources de déformabilité.
1-15 Approche traditionnelle de modélisation des assemblages pour l’analyse structurale:
Lors de l’analyse structurale, les assemblages entre les éléments structuraux sont
traditionnellement modélisés comme rigides ou rotules. La procédure classique de
dimensionnement des éléments et des assemblages est alors souvent réalisée comme le
schéma ci-dessous.
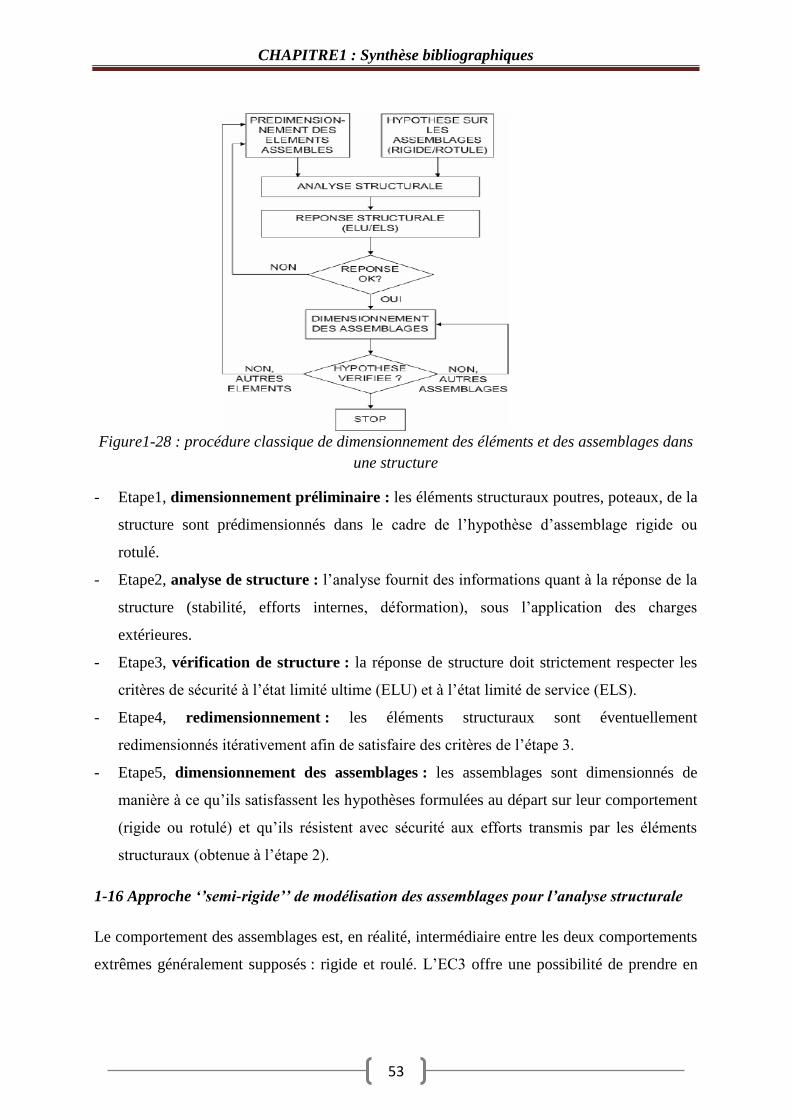
CHAPITRE1 : Synthèse bibliographiques
53
Figure1-28 : procédure classique de dimensionnement des éléments et des assemblages dans
une structure
- Etape1, dimensionnement préliminaire : les éléments structuraux poutres, poteaux, de la
structure sont prédimensionnés dans le cadre de l’hypothèse d’assemblage rigide ou
rotulé.
- Etape2, analyse de structure : l’analyse fournit des informations quant à la réponse de la
structure (stabilité, efforts internes, déformation), sous l’application des charges
extérieures.
- Etape3, vérification de structure : la réponse de structure doit strictement respecter les
critères de sécurité à l’état limité ultime (ELU) et à l’état limité de service (ELS).
- Etape4, redimensionnement : les éléments structuraux sont éventuellement
redimensionnés itérativement afin de satisfaire des critères de l’étape 3.
- Etape5, dimensionnement des assemblages : les assemblages sont dimensionnés de
manière à ce qu’ils satisfassent les hypothèses formulées au départ sur leur comportement
(rigide ou rotulé) et qu’ils résistent avec sécurité aux efforts transmis par les éléments
structuraux (obtenue à l’étape 2).
1-16 Approche ‘’semi-rigide’’ de modélisation des assemblages pour l’analyse structurale
Le comportement des assemblages est, en réalité, intermédiaire entre les deux comportements
extrêmes généralement supposés : rigide et roulé. L’EC3 offre une possibilité de prendre en
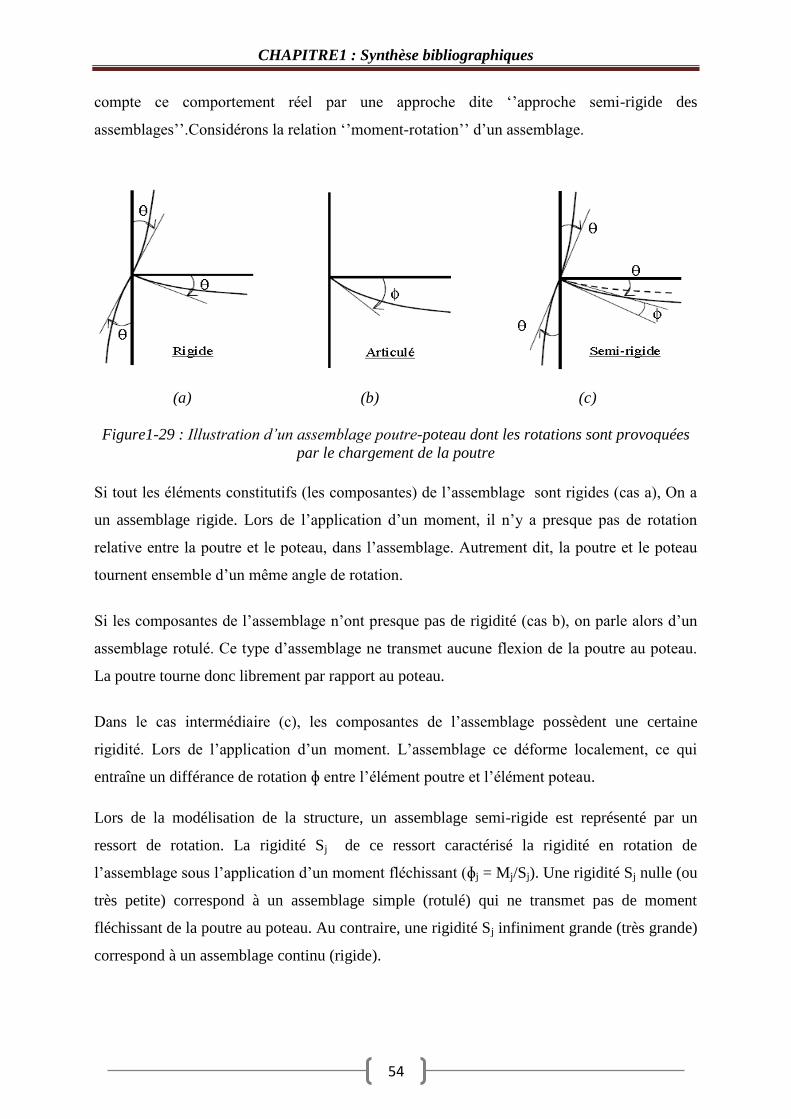
CHAPITRE1 : Synthèse bibliographiques
54
compte ce comportement réel par une approche dite ‘’approche semi-rigide des
assemblages’’.Considérons la relation ‘’moment-rotation’’ d’un assemblage.
(a) (b) (c)
Figure1-29 : Illustration d’un assemblage poutre-poteau dont les rotations sont provoquées
par le chargement de la poutre
Si tout les éléments constitutifs (les composantes) de l’assemblage sont rigides (cas a), On a
un assemblage rigide. Lors de l’application d’un moment, il n’y a presque pas de rotation
relative entre la poutre et le poteau, dans l’assemblage. Autrement dit, la poutre et le poteau
tournent ensemble d’un même angle de rotation.
Si les composantes de l’assemblage n’ont presque pas de rigidité (cas b), on parle alors d’un
assemblage rotulé. Ce type d’assemblage ne transmet aucune flexion de la poutre au poteau.
La poutre tourne donc librement par rapport au poteau.
Dans le cas intermédiaire (c), les composantes de l’assemblage possèdent une certaine
rigidité. Lors de l’application d’un moment. L’assemblage ce déforme localement, ce qui
entraîne un différance de rotation ɸ entre l’élément poutre et l’élément poteau.
Lors de la modélisation de la structure, un assemblage semi-rigide est représenté par un
ressort de rotation. La rigidité Sj de ce ressort caractérisé la rigidité en rotation de
l’assemblage sous l’application d’un moment fléchissant (ɸj = Mj/Sj). Une rigidité Sj nulle (ou
très petite) correspond à un assemblage simple (rotulé) qui ne transmet pas de moment
fléchissant de la poutre au poteau. Au contraire, une rigidité Sj infiniment grande (très grande)
correspond à un assemblage continu (rigide).
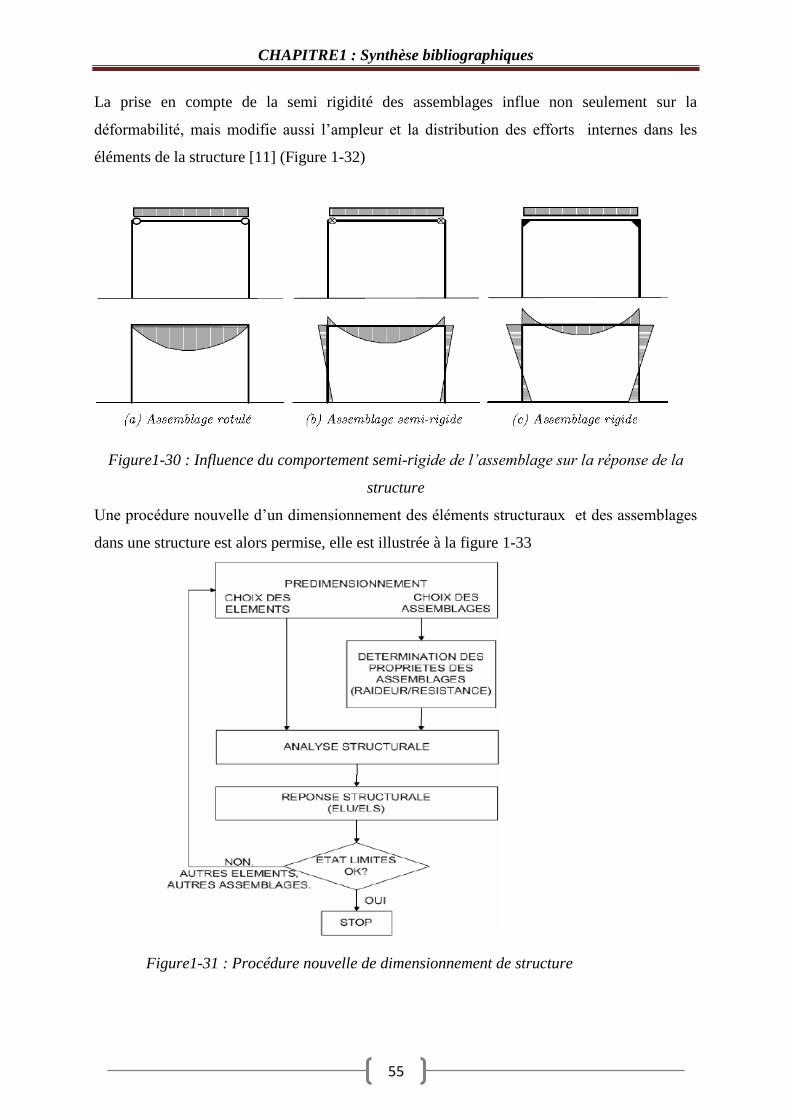
CHAPITRE1 : Synthèse bibliographiques
55
La prise en compte de la semi rigidité des assemblages influe non seulement sur la
déformabilité, mais modifie aussi l’ampleur et la distribution des efforts internes dans les
éléments de la structure [11] (Figure 1-32)
Figure1-30 : Influence du comportement semi-rigide de l’assemblage sur la réponse de la
structure
Une procédure nouvelle d’un dimensionnement des éléments structuraux et des assemblages
dans une structure est alors permise, elle est illustrée à la figure 1-33
Figure1-31 : Procédure nouvelle de dimensionnement de structure
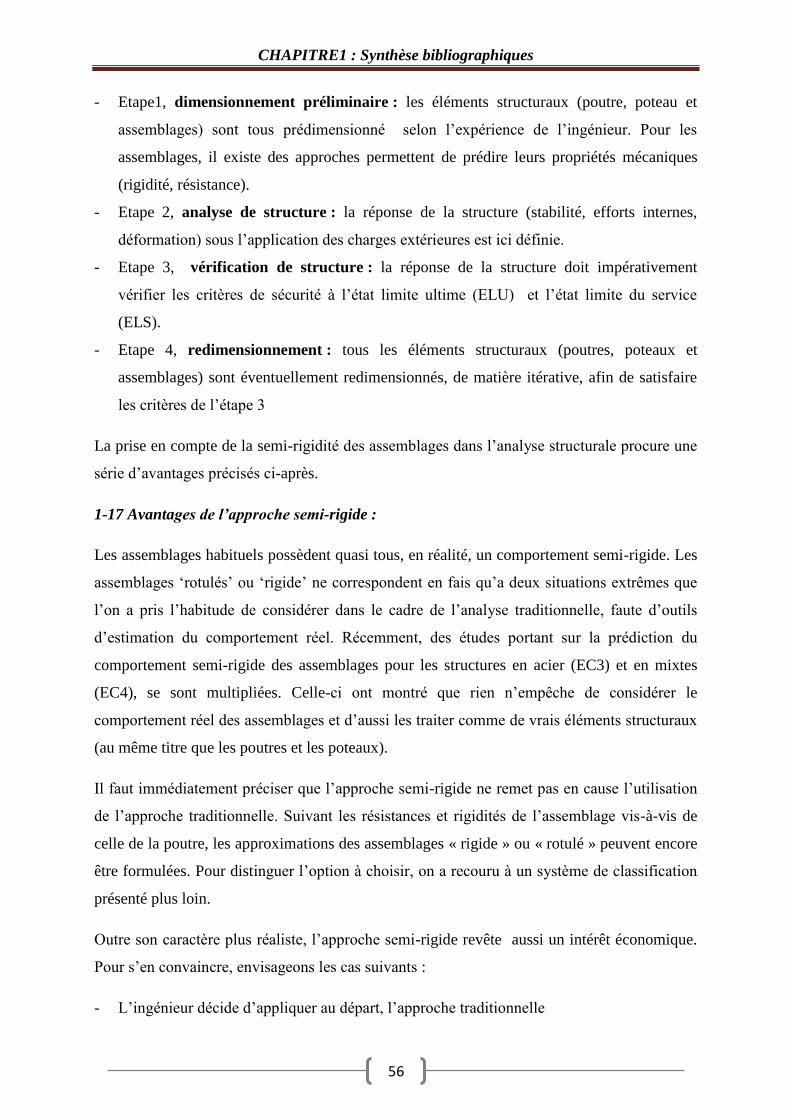
CHAPITRE1 : Synthèse bibliographiques
56
- Etape1, dimensionnement préliminaire : les éléments structuraux (poutre, poteau et
assemblages) sont tous prédimensionné selon l’expérience de l’ingénieur. Pour les
assemblages, il existe des approches permettent de prédire leurs propriétés mécaniques
(rigidité, résistance).
- Etape 2, analyse de structure : la réponse de la structure (stabilité, efforts internes,
déformation) sous l’application des charges extérieures est ici définie.
- Etape 3, vérification de structure : la réponse de la structure doit impérativement
vérifier les critères de sécurité à l’état limite ultime (ELU) et l’état limite du service
(ELS).
- Etape 4, redimensionnement : tous les éléments structuraux (poutres, poteaux et
assemblages) sont éventuellement redimensionnés, de matière itérative, afin de satisfaire
les critères de l’étape 3
La prise en compte de la semi-rigidité des assemblages dans l’analyse structurale procure une
série d’avantages précisés ci-après.
1-17 Avantages de l’approche semi-rigide :
Les assemblages habituels possèdent quasi tous, en réalité, un comportement semi-rigide. Les
assemblages ‘rotulés’ ou ‘rigide’ ne correspondent en fais qu’a deux situations extrêmes que
l’on a pris l’habitude de considérer dans le cadre de l’analyse traditionnelle, faute d’outils
d’estimation du comportement réel. Récemment, des études portant sur la prédiction du
comportement semi-rigide des assemblages pour les structures en acier (EC3) et en mixtes
(EC4), se sont multipliées. Celle-ci ont montré que rien n’empêche de considérer le
comportement réel des assemblages et d’aussi les traiter comme de vrais éléments structuraux
(au même titre que les poutres et les poteaux).
Il faut immédiatement préciser que l’approche semi-rigide ne remet pas en cause l’utilisation
de l’approche traditionnelle. Suivant les résistances et rigidités de l’assemblage vis-à-vis de
celle de la poutre, les approximations des assemblages « rigide » ou « rotulé » peuvent encore
être formulées. Pour distinguer l’option à choisir, on a recouru à un système de classification
présenté plus loin.
Outre son caractère plus réaliste, l’approche semi-rigide revête aussi un intérêt économique.
Pour s’en convaincre, envisageons les cas suivants :
- L’ingénieur décide d’appliquer au départ, l’approche traditionnelle
CHAPITRE1 : Synthèse bibliographiques
57
L’assemblage est supposé rigide. Dans la pratique, l’ingénieur ou le constructeur
va renforcer autant que possible la configuration de l’assemblage, par l’addition
de raidisseur d’âme, ces renforcement engendrent des coûtes de fabrication élevés.
L’approche nouvelle, quant à elle, fournit des outils visant à vérifier si la présence
de ces raidisseur et vraiment nécessaire pour l’assemblage (en résistance et en
rigidité). On peut aussi optimiser efficacement une configuration pour que
l’assemblage soit rigide, mais pas plus.
L’assemblage est supposé rotulé. Dans la pratique, un assemblage « rotulé »
possède toujours une certaine rigidité. L’approche nouvelle permet d’estimer cette
valeur, l’assemblage peut dans les fais reprendre un moment de flexion et la poutre
est donc moins chargée. la taille de la poutre peut alors être réduite en tenant
compte de la semi-rigidité effective de l’assemblage.
- L’ingénieur décide, en premier lieu, d’intégrer les propriétés mécaniques réelles des
éléments structuraux (poutres, poteaux et assemblages) dans l’analyse de la structure.
l’adoption de la nouvelle approche exige une bonne connaissance du compromis à réaliser
entre, d’un coté, le coût et la complexité des assemblages et, de l’autre coté, l’optimisation
du comportement global de la structure et de la performance de tous les éléments
structuraux, dont les assemblages.
Dans une structure contreventée l’utilisation des assemblages semi-rigides n’est
généralement pas plus onéreuse que celle d’assemblages rotulés, mais conduit
généralement à une diminution de poids des poutres, et donc de matériaux à mettre
en œuvre.
Dans une structure non contreventée, l’utilisation des assemblages semi-rigides
moins coûteux que les rigides, se solde par une possible augmentation de poids de
la structure.
Diverses études techno-économiques réalisées sur les structures en acier ont montré qu’un
bénéfice global de l’ordre de 5 à 10% peut être obtenu dans le premier cas, mais qu’une
économie encore plus substantielle peuvent être entrevue dans le seconde cas et ce, la raison
de l’importance des coûtes de fabrication et de montage, en regard des coûtes de matériaux.
CHAPITRE 2
Approche analytique de calcul des assemblages selonl’EC3 (Méthode des composantes)
CHAPITRE2 : Méthode des composantes
59
2-1 Introduction :
L’Eurocode 3, partie 1-8 [14] est la seule norme qui permette de prévoir par le calcul les
caractéristiques d’assemblages semi-rigides et/ou partiellement résistants en construction
métallique [8].
Le comportement semi-rigide associé à des déformations locales au sein d’un assemblage
sous l’effet des efforts appliqués. Chacune de ces sources appelée ‘’composante ‘’ ; elle
contribue, selon les caractéristiques propre de déformation, au comportement globale de
l’assemblage. L’analyse du comportement d’un assemblage à travers de l’étude de l’ensemble
de ces composantes constitutives est appelée « méthode des composantes ». Chacune des
composantes peut être modélisées par un élément de ressort dont la réponse non linéaire
« force-déformation » doit être défini, le comportement d’un assemblage résulte de la
recombinaison des réponses individuelles des ressorts assemblés. La procédure de
détermination du comportement d’un assemblage, selon la méthode des composantes, peut
être résumée en trois étapes :
1- Identification des composantes.
2- Caractérisation des comportements de chaque composante individuelle.
3- Assemblage des composantes en vue de la détermination du comportement de
l’assemblage
L’Eurocode 3 adopte un certain nombre d’hypothèses simplificatrices en vue de calculer le
moment résistant et la rigidité d’un assemblage. Ces hypothèses sont à respecter pour la
distribution des efforts internes dans les composantes de chaque assemblage :
Les efforts internes sont en équilibre avec les efforts appliqués
Chaque composante est capable de résister aux efforts internes
La déformation due à la distribution d’efforts est supposée ne pas dépasser la capacité de
chaque composante (boulons, soudure,…)
La distribution doit être réaliste au regard des distributions de rigidités.
Dans ce qui suit en traite par la méthode des composantes un assemblage par platine d’about
débordante boulonnée.
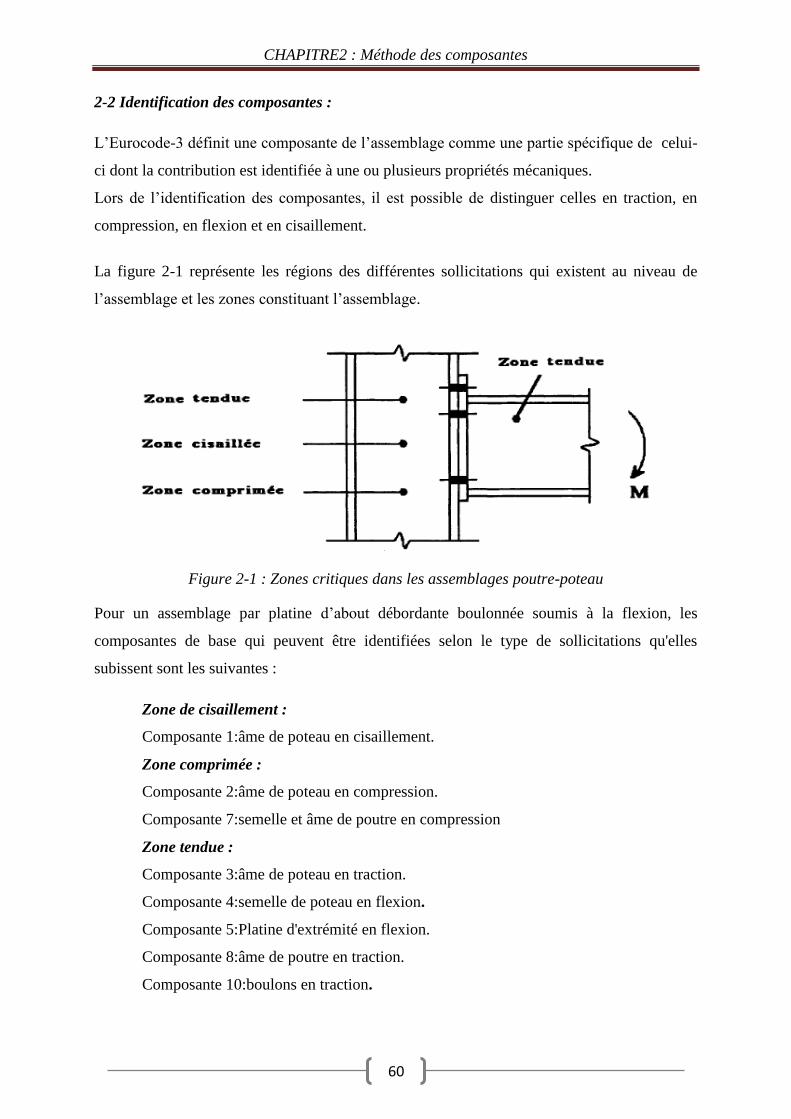
CHAPITRE2 : Méthode des composantes
60
2-2 Identification des composantes :
L’Eurocode-3 définit une composante de l’assemblage comme une partie spécifique de celui-
ci dont la contribution est identifiée à une ou plusieurs propriétés mécaniques.
Lors de l’identification des composantes, il est possible de distinguer celles en traction, en
compression, en flexion et en cisaillement.
La figure 2-1 représente les régions des différentes sollicitations qui existent au niveau de
l’assemblage et les zones constituant l’assemblage.
Figure 2-1 : Zones critiques dans les assemblages poutre-poteau
Pour un assemblage par platine d’about débordante boulonnée soumis à la flexion, les
composantes de base qui peuvent être identifiées selon le type de sollicitations qu'elles
subissent sont les suivantes :
Zone de cisaillement :
Composante 1:âme de poteau en cisaillement.
Zone comprimée :
Composante 2:âme de poteau en compression.
Composante 7:semelle et âme de poutre en compression
Zone tendue :
Composante 3:âme de poteau en traction.
Composante 4:semelle de poteau en flexion.
Composante 5:Platine d'extrémité en flexion.
Composante 8:âme de poutre en traction.
Composante 10:boulons en traction.
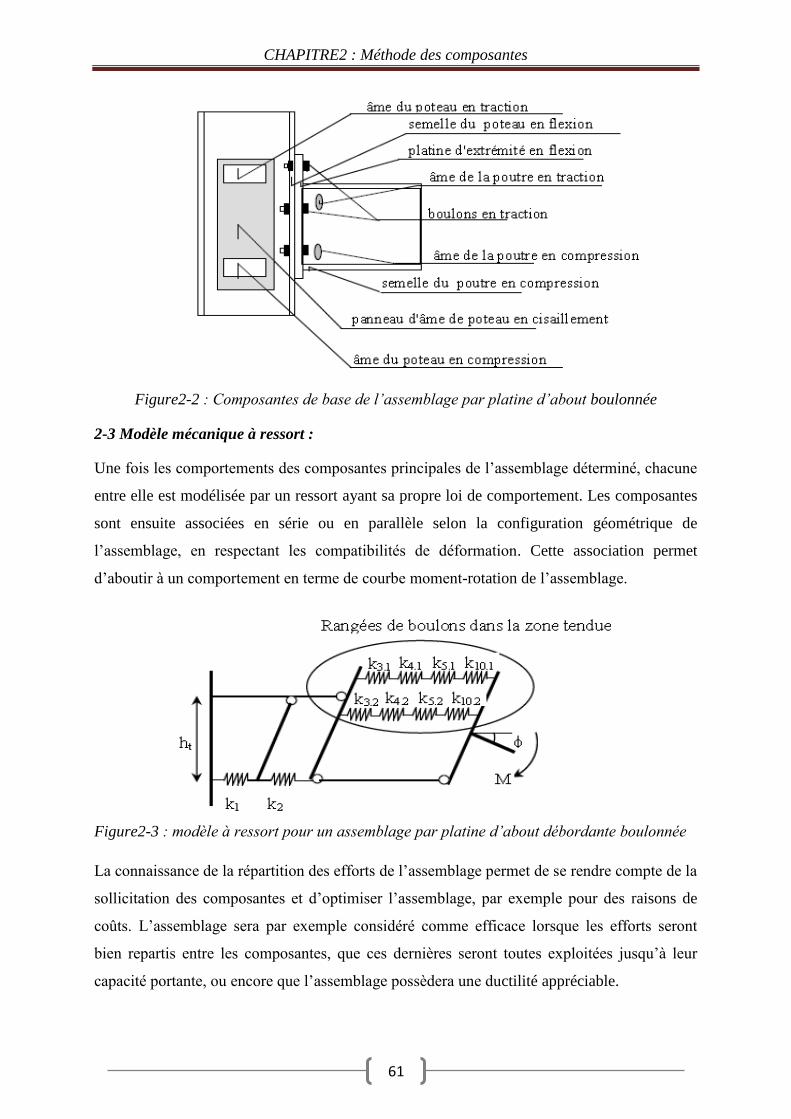
CHAPITRE2 : Méthode des composantes
61
Figure2-2 : Composantes de base de l’assemblage par platine d’about boulonnée
2-3 Modèle mécanique à ressort :
Une fois les comportements des composantes principales de l’assemblage déterminé, chacune
entre elle est modélisée par un ressort ayant sa propre loi de comportement. Les composantes
sont ensuite associées en série ou en parallèle selon la configuration géométrique de
l’assemblage, en respectant les compatibilités de déformation. Cette association permet
d’aboutir à un comportement en terme de courbe moment-rotation de l’assemblage.
Figure2-3 : modèle à ressort pour un assemblage par platine d’about débordante boulonnée
La connaissance de la répartition des efforts de l’assemblage permet de se rendre compte de la
sollicitation des composantes et d’optimiser l’assemblage, par exemple pour des raisons de
coûts. L’assemblage sera par exemple considéré comme efficace lorsque les efforts seront
bien repartis entre les composantes, que ces dernières seront toutes exploitées jusqu’à leur
capacité portante, ou encore que l’assemblage possèdera une ductilité appréciable.
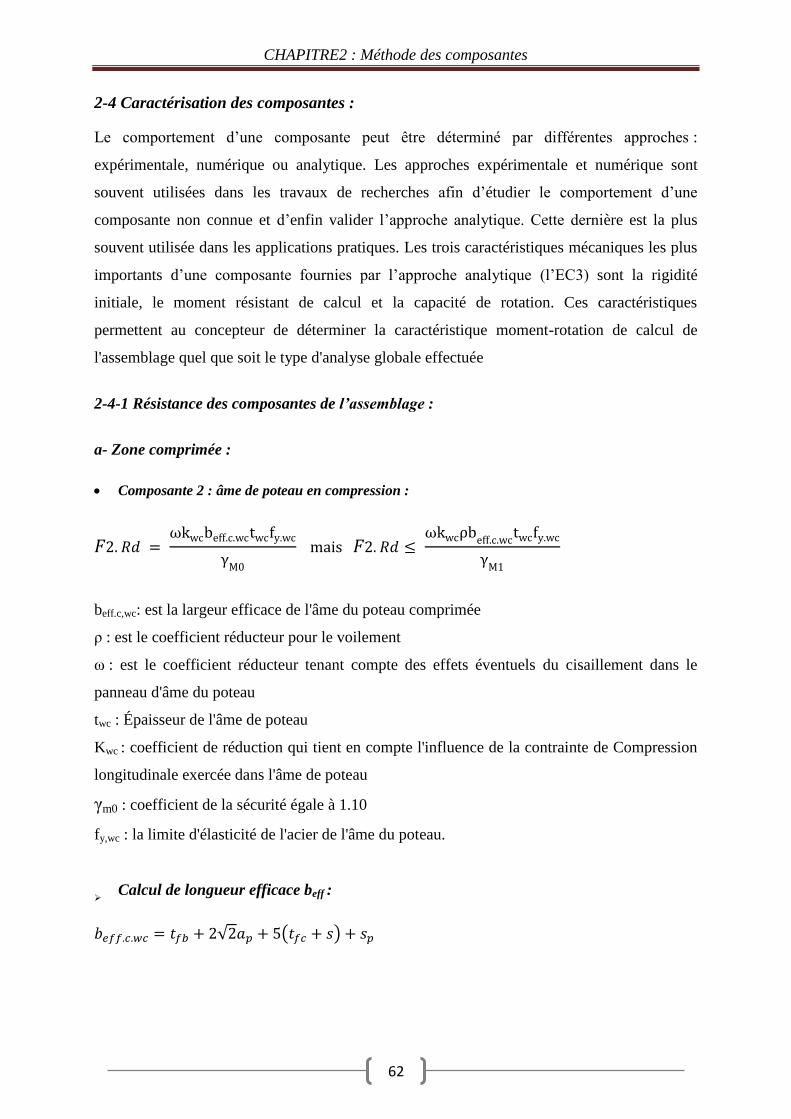
CHAPITRE2 : Méthode des composantes
62
2-4 Caractérisation des composantes :
Le comportement d’une composante peut être déterminé par différentes approches :
expérimentale, numérique ou analytique. Les approches expérimentale et numérique sont
souvent utilisées dans les travaux de recherches afin d’étudier le comportement d’une
composante non connue et d’enfin valider l’approche analytique. Cette dernière est la plus
souvent utilisée dans les applications pratiques. Les trois caractéristiques mécaniques les plus
importants d’une composante fournies par l’approche analytique (l’EC3) sont la rigidité
initiale, le moment résistant de calcul et la capacité de rotation. Ces caractéristiques
permettent au concepteur de déterminer la caractéristique moment-rotation de calcul de
l'assemblage quel que soit le type d'analyse globale effectuée
2-4-1 Résistance des composantes de l’assemblage :
a- Zone comprimée :
Composante 2 : âme de poteau en compression :
beff.c,wc: est la largeur efficace de l'âme du poteau comprimée
ρ : est le coefficient réducteur pour le voilement
ω : est le coefficient réducteur tenant compte des effets éventuels du cisaillement dans le
panneau d'âme du poteau
twc : Épaisseur de l'âme de poteau
Kwc : coefficient de réduction qui tient en compte l'influence de la contrainte de Compression
longitudinale exercée dans l'âme de poteau
γm0 : coefficient de la sécurité égale à 1.10
fy,wc : la limite d'élasticité de l'acier de l'âme du poteau.
Calcul de longueur efficace beff :

CHAPITRE2 : Méthode des composantes
63
sp : est la longueur obtenue par diffusion à 45° dans la platine d'about (au moins tp et, sous
réserve que la longueur de la platine d'about au-delà de la semelle soit suffisante, jusqu'à 2tp).
s = rc :pour les profilés l'aminés en I ou H
tfb , tfc , rc et ap sont tels qu'indiqués dans la figure 2-4
Figure2-4 : Définitions de tfb , tfc , rc et ap
Calcul de ρ :
λp : représente l'élancement de plaque
Calcul de Kwc :
Le calcul de Kwc est en fonction de la contrainte de compression longitudinale maximale
σcom,Ed
Lorsque σcom,Ed ≤ 0.5 fy.wc : kwc = 1
Lorsque σcom,Ed > 0.5 fy.wc : kwc = 1.25 - 0.5 σcom,Ed / fy.wc
En général, le coefficient réducteur kwc est égal à 1 et aucune réduction n'est nécessaire. Il
peut, par conséquent, être omis dans les calculs préliminaires lorsque la contrainte
longitudinale est inconnue, et vérifié ultérieurement.

CHAPITRE2 : Méthode des composantes
64
Calcul ω :
Tableau 2-1 : valeurs du coefficient réducteur ω
Composante 7 : semelle et âme de poutre en compression :
hb : est la hauteur de la poutre assemblée
Mc,Rd : est le moment résistant de la section transversale de poutre
tfb est l’épaisseur de semelle de la poutre assemblée
La résistance de la zone comprimée :
b- Résistance de la zone tendue:
Une des composantes principales d’un assemblage boulonné avec platine débordante de type
poteau-poutre est le tronçon en té qui représente la zone tendue. Ce tronçon en té peut être
considéré comme un assemblage élémentaire unique ou comme une partie d’une
configuration plus complexe.
La zone tendue composée dans ce cas, de deux tronçons en Té attachés par quatre boulons
comme représenté sur la figure suivante [25]:
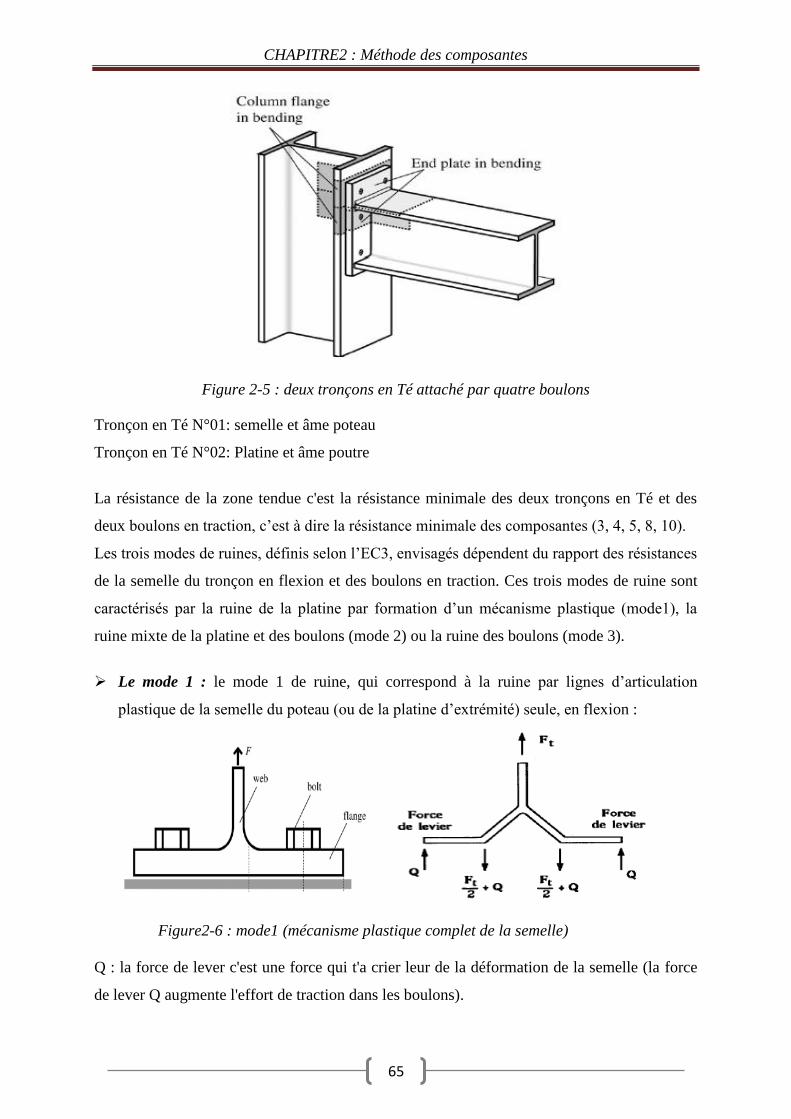
CHAPITRE2 : Méthode des composantes
65
Figure 2-5 : deux tronçons en Té attaché par quatre boulons
Tronçon en Té N°01: semelle et âme poteau
Tronçon en Té N°02: Platine et âme poutre
La résistance de la zone tendue c'est la résistance minimale des deux tronçons en Té et des
deux boulons en traction, c’est à dire la résistance minimale des composantes (3, 4, 5, 8, 10).
Les trois modes de ruines, définis selon l’EC3, envisagés dépendent du rapport des résistances
de la semelle du tronçon en flexion et des boulons en traction. Ces trois modes de ruine sont
caractérisés par la ruine de la platine par formation d’un mécanisme plastique (mode1), la
ruine mixte de la platine et des boulons (mode 2) ou la ruine des boulons (mode 3).
Le mode 1 : le mode 1 de ruine, qui correspond à la ruine par lignes d’articulation
plastique de la semelle du poteau (ou de la platine d’extrémité) seule, en flexion :
Figure2-6 : mode1 (mécanisme plastique complet de la semelle)
Q : la force de lever c'est une force qui t'a crier leur de la déformation de la semelle (la force
de lever Q augmente l'effort de traction dans les boulons).
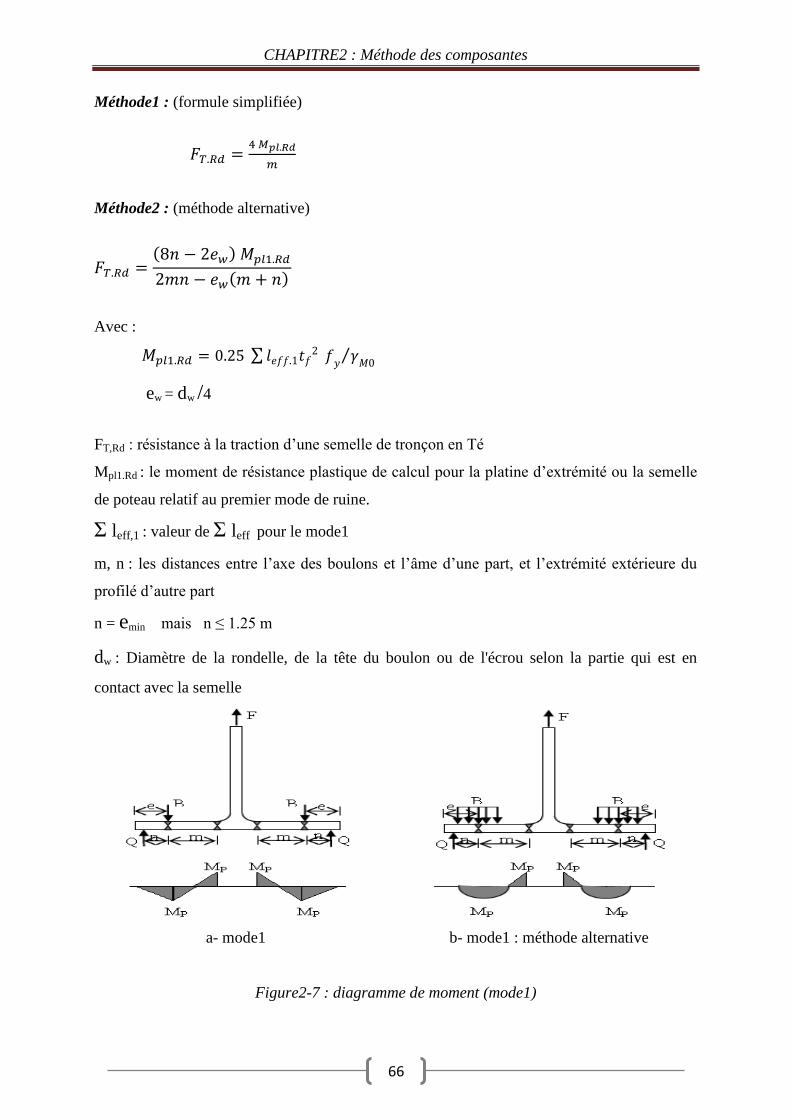
CHAPITRE2 : Méthode des composantes
66
Méthode1 : (formule simplifiée)
Méthode2 : (méthode alternative)
Avec :
ew = dw /4
FT,Rd : résistance à la traction d’une semelle de tronçon en Té
Mpl1.Rd : le moment de résistance plastique de calcul pour la platine d’extrémité ou la semelle
de poteau relatif au premier mode de ruine.
Σ leff,1 : valeur de Σ leff pour le mode1
m, n : les distances entre l’axe des boulons et l’âme d’une part, et l’extrémité extérieure du
profilé d’autre part
n = emin mais n ≤ 1.25 m
dw : Diamètre de la rondelle, de la tête du boulon ou de l'écrou selon la partie qui est en
contact avec la semelle
a- mode1 b- mode1 : méthode alternative
Figure2-7 : diagramme de moment (mode1)
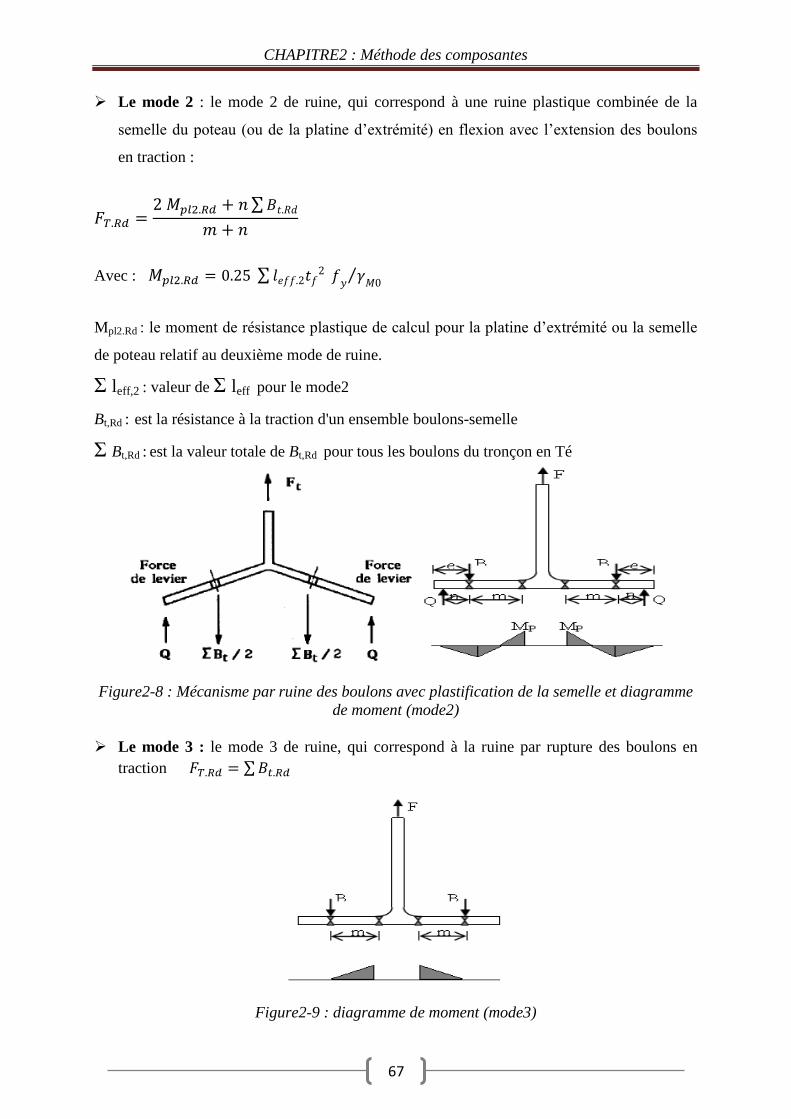
CHAPITRE2 : Méthode des composantes
67
Le mode 2 : le mode 2 de ruine, qui correspond à une ruine plastique combinée de la
semelle du poteau (ou de la platine d’extrémité) en flexion avec l’extension des boulons
en traction :
Avec :
Mpl2.Rd : le moment de résistance plastique de calcul pour la platine d’extrémité ou la semelle
de poteau relatif au deuxième mode de ruine.
Σ leff,2 : valeur de Σ leff pour le mode2
Bt,Rd : est la résistance à la traction d'un ensemble boulons-semelle
Σ Bt,Rd : est la valeur totale de Bt,Rd pour tous les boulons du tronçon en Té
Figure2-8 : Mécanisme par ruine des boulons avec plastification de la semelle et diagramme
de moment (mode2)
Le mode 3 : le mode 3 de ruine, qui correspond à la ruine par rupture des boulons en
traction
Figure2-9 : diagramme de moment (mode3)
CHAPITRE2 : Méthode des composantes
68
Dans les modes 1 et 2, la déformation de la semelle du tronçon en té conduit à l’apparition de
l’effort de levier dont la position dépend de la rigidité des boulons tendus et de la semelle
fléchie. Par contre, la rigidité importante de la semelle dans le troisième mode conduit à une
répartition des efforts sans apparition des efforts de levier. En réalité, les têtes des boulons, les
écrous et les rondelles possèdent des diamètres non négligeables et les efforts transmis à la
semelle sont répartis sur une certaine zone du contact entre le boulon et la semelle [Figure2-7
(b)]. Cet effet est traduit dans l’EC3 sous la forme d’une forme alternative d’évaluation de la
résistance plastique de la semelle. Cette formule est basée sur l’hypothèse d’une distribution
uniforme de contraintes sous la tête du boulon, de l’écrou ou de la rondelle.
Dans ce cas, la résistance du tronçon en té en mode 1, doit être modifiée en intégrant l’effet de
(n et dw) (formule de la méthode alternative). L’avantage de cette procédure est de fournir le
mode de ruine associé qui permettrait d’éviter les modes de ruine fragiles [1] :
Le premier mode de ruine s’accompagne d’une déformation plastique importante de la
semelle. Ce mode ductile est donc recherché.
Le deuxième mode de ruine se caractérise par une capacité de déformation variable
d’un tronçon à l’autre. Il est intermédiaire.
Le troisième mode de ruine est fragile car il correspond à la ruine brutale des boulons.
Il est donc à éviter.
Longueur efficace du tronçon en Té :
L’équivalence entre le tronçon en Té et la zone tendue d’un assemblage métallique se traduit
par la détermination d’une longueur équivalente dite longueur efficace et noté Leff .
Cette longueur est définie selon les schémas des lignes de plastification des différentes
rangées de boulons, prises séparément lorsque la distance entre les rangées de boulons est
importance ou en groupe lorsque les rangées de boulons sont proches. Il est à signaler que la
longueur efficace d’un tronçon en Té équivalent est une longueur théorique et ne comprend
pas nécessairement la longueur physique de la composante de base qu’il représente. Les
valeurs à adopter pour la longueur efficace dépendent de la configuration de l’assemblage et
de la disposition des trous. L’EC3 propose des valeurs de Leff pour la plupart des cas
rencontrés dans la pratique avec leurs schémas correspondants de ruine.
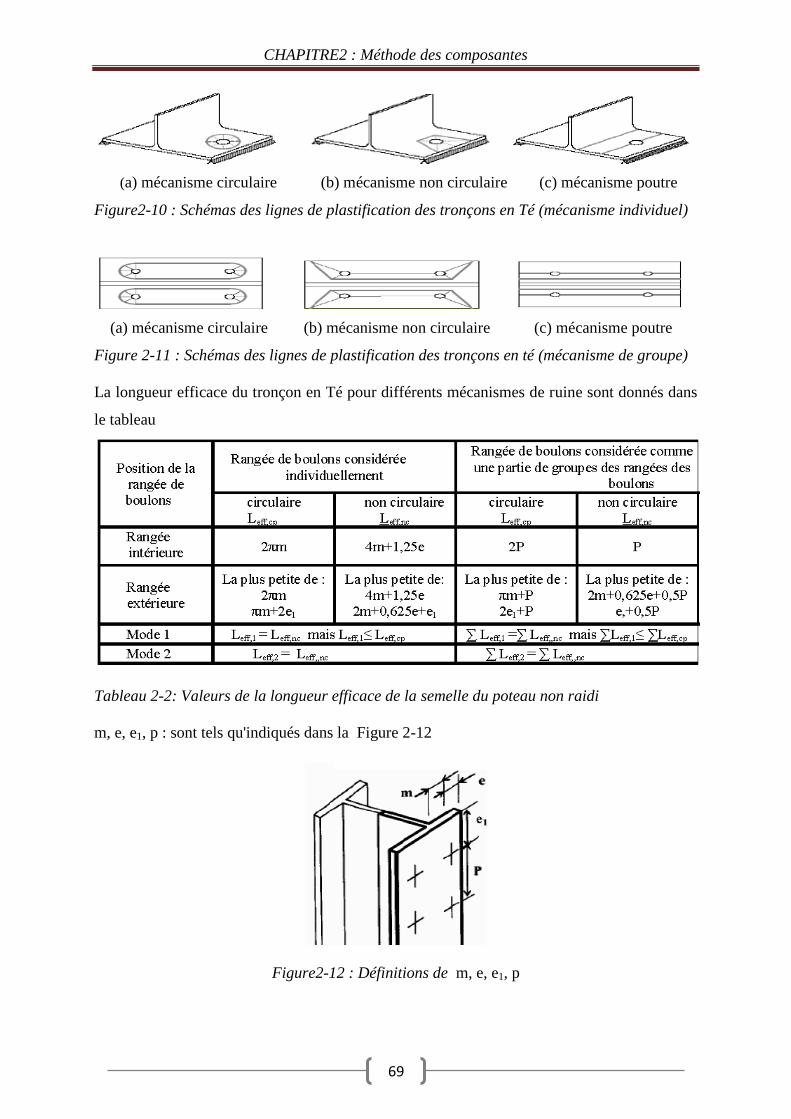
CHAPITRE2 : Méthode des composantes
69
(a) mécanisme circulaire (b) mécanisme non circulaire (c) mécanisme poutre
Figure2-10 : Schémas des lignes de plastification des tronçons en Té (mécanisme individuel)
(a) mécanisme circulaire (b) mécanisme non circulaire (c) mécanisme poutre
Figure 2-11 : Schémas des lignes de plastification des tronçons en té (mécanisme de groupe)
La longueur efficace du tronçon en Té pour différents mécanismes de ruine sont donnés dans
le tableau
Tableau 2-2: Valeurs de la longueur efficace de la semelle du poteau non raidi
m, e, e1, p : sont tels qu'indiqués dans la Figure 2-12
Figure2-12 : Définitions de m, e, e1, p
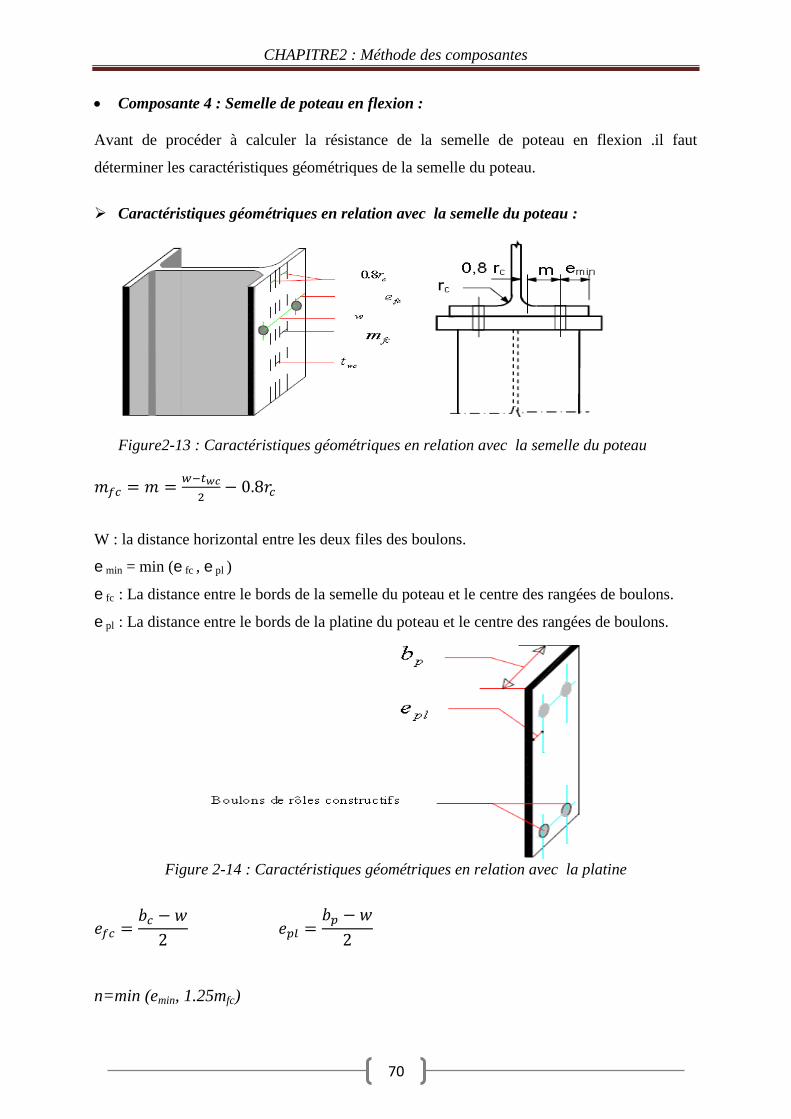
CHAPITRE2 : Méthode des composantes
70
Composante 4 : Semelle de poteau en flexion :
Avant de procéder à calculer la résistance de la semelle de poteau en flexion .il faut
déterminer les caractéristiques géométriques de la semelle du poteau.
Caractéristiques géométriques en relation avec la semelle du poteau :
Figure2-13 : Caractéristiques géométriques en relation avec la semelle du poteau
W : la distance horizontal entre les deux files des boulons.
e min = min (e fc , e pl )
e fc : La distance entre le bords de la semelle du poteau et le centre des rangées de boulons.
e pl : La distance entre le bords de la platine du poteau et le centre des rangées de boulons.
Figure 2-14 : Caractéristiques géométriques en relation avec la platine
n=min (emin, 1.25mfc)

CHAPITRE2 : Méthode des composantes
71
Calcul de la longueur efficace :
(a) Dans le cas des boulons intérieurs :
Leff t, fc(a) = min (2πm, 4m+1.25e, 0.5p+2m+0.625e)
(b) Dans le cas des boulons extérieurs :
Leff t, fc(b) = min (2πm, 4m+1.25e, p)
La résistance de la semelle de poteau en flexion c'est la résistance minimale de tronçon en Té
équivalent (âme et semelle du poteau) suivant les modes 1, 2 et 3 :
F4.Rd = min (F4 (1).Rd, F4 (2).Rd, F4 (3).Rd)
1er
mode :
2eme
mode :
3eme
mode :
F4(3).Rd = ΣBt.Rd
Composante 3 : Ame de poteau en traction :
ω : est le coefficient réducteur tenant compte des effets éventuels du cisaillement dans le
panneau d'âme du poteau
Le calcul de w se fait dans le calcul de composante 2.
La longueur efficace de l'âme du poteau = la longueur efficace de la semelle du poteau
beff.t.wc = Leff.t.fc

CHAPITRE2 : Méthode des composantes
72
Composante 5 : Platine en flexion :
La résistance de la platine à la flexion c'est la résistance minimale de tronçon équivalent en Té
(platine et âme poutre) suivant les modes 1, 2 et 3 :
F5.Rd = min (F5(1).Rd, F5(2).Rd, F5(3).Rd)
1
er mode :
2eme
mode :
3
eme mode :
F5(3).Rd = ΣBt.Rd
Calcul de la longueur efficace :
- Dans le cas de boulons extérieurs à la semelle tendue de la poutre :
Leff.p.(a) = min (0.5bp, 0.5w+2mx + 0.625ex, 4mx +1.25ex, 2πmx)
- Dans le cas de la première rangée de boulons en dessous de la semelle tendue de la
poutre : Leff.p.(a) = min (2πm, αm)
- Dans le cas des boulons intérieurs : Leff.p.(a) = min (p, 2πm, 4m + 1.25 e)
on détermine la valeur de a partir de , a l’aide de la courbe (,,)
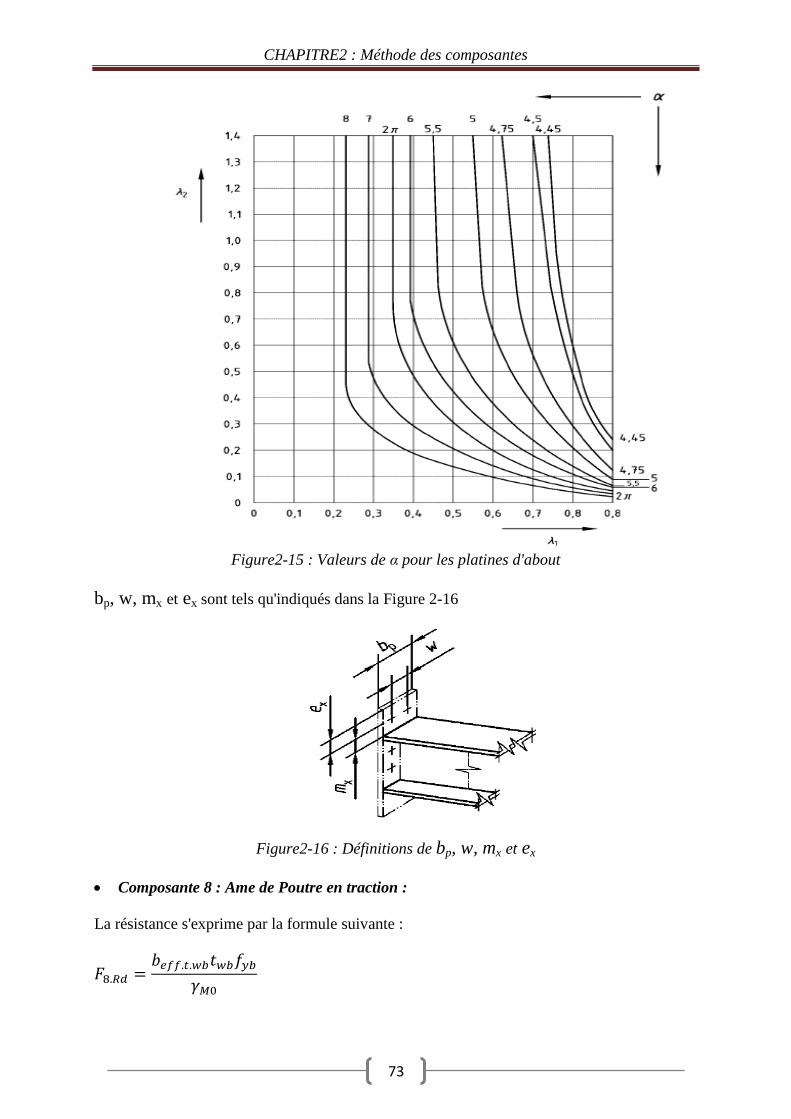
CHAPITRE2 : Méthode des composantes
73
Figure2-15 : Valeurs de α pour les platines d'about
bp, w, mx et ex sont tels qu'indiqués dans la Figure 2-16
Figure2-16 : Définitions de bp, w, mx et ex
Composante 8 : Ame de Poutre en traction :
La résistance s'exprime par la formule suivante :

CHAPITRE2 : Méthode des composantes
74
La longueur efficace d’âme de la poutre = la longueur efficace de la platine
beff.t.wb = Leff.p
Composante 10 : Boulons en traction
F10.Rd = 2 Bt.Rd
Avec :
Tel que γmb = 1.25
La résistance de la zone tendue :
La résistance de calcul en traction au droit d’une rangée de boulon est déterminée par la
valeur minimale entre les composantes suivantes :
- l’âme du poteau en traction : F3.Rd
- la semelle du poteau en flexion : F4.Rd
- la platine d’extrémité en flexion : F5.Rd
- l’âme de la poutre en traction : F8.Rd
En effet, cette résistance correspond à la résistance minimale de tous les ressorts assemblés en
série et sollicités par la même traction au niveau de cette rangée.
Ft.Rd = min (F3.Rd, F4.Rd, F5.Rd, F8.Rd)
C - Résistance de la zone cisaillée:
Composante 01 : Ame du poteau en cisaillement :
Avc : est l'aire de cisaillement du poteau
Avc = Ac – 2bc tfc + (twc + 2rc) tfc
CHAPITRE2 : Méthode des composantes
75
2-4-2 Rigidité des composantes de l’assemblage :
a- Zone comprimée :
Composante 2 : âme de poteau en compression :
Avec :
twc : Épaisseur de l'âme de poteau
beff.c: Est la largeur efficace de l'âme du poteau comprimée
dc : hauteur libre de l'âme du poteau
Composante 7 : semelle et âme de poutre en compression :
K7 = ∞
b- Zone tendue :
Composante 3:âme de poteau en traction :
La longueur efficace de l'âme du poteau = la longueur efficace de la semelle du poteau
beff.t.wc = Leff.t.fc
Composante 4:semelle de poteau en flexion :
Composante 5:Platine d'extrémité en flexion :
Composante 8 : Ame de Poutre en traction :
K8 = ∞

CHAPITRE2 : Méthode des composantes
76
Composante 10 : Boulons en traction :
K10 = 1.6 As / Lb
Où :
As : est l’aire de la section résistante en traction du boulon
Lb : est la longueur utile d'allongement du boulon, prise égale à la longueur serrée
(épaisseur totale des plaques et des rondelles), plus la moitié de la somme de la
hauteur de la tête du boulon et de la hauteur de l'écrou.
c- Zone cisaillée:
Composante 01 : Ame du poteau en cisaillement :
Où :
Avc : est l’aire de cisaillement du poteau
z : est le bras de levier
β : est un paramètre de transformation dû au cisaillement de l’assemblage, qui tient
compte des valeurs des moments fléchissant exercés aux extrémités des poutres
attachées à l’assemblage. Sa valeur est comprise entre 0 et 2 et peut être calculée
plus précisément par la formule : β = 1- Mjb2, Sd / Mjb1, Sd en désignant les
valeurs des moments exercés par les poutres sur l’assemblage par Mjb2, Sd et Mjb1, Sd .
2-4-3 Assemblage des Composantes :
a- Calcul du moment résistant de l’assemblage :
Dans le cas de plusieurs rangées de composantes en traction, la distribution des efforts est
complexe, trois types de distribution des efforts intérieurs peuvent être envisagés:
une distribution élastique.
Une distribution plastique.
une distribution élasto-plastique.
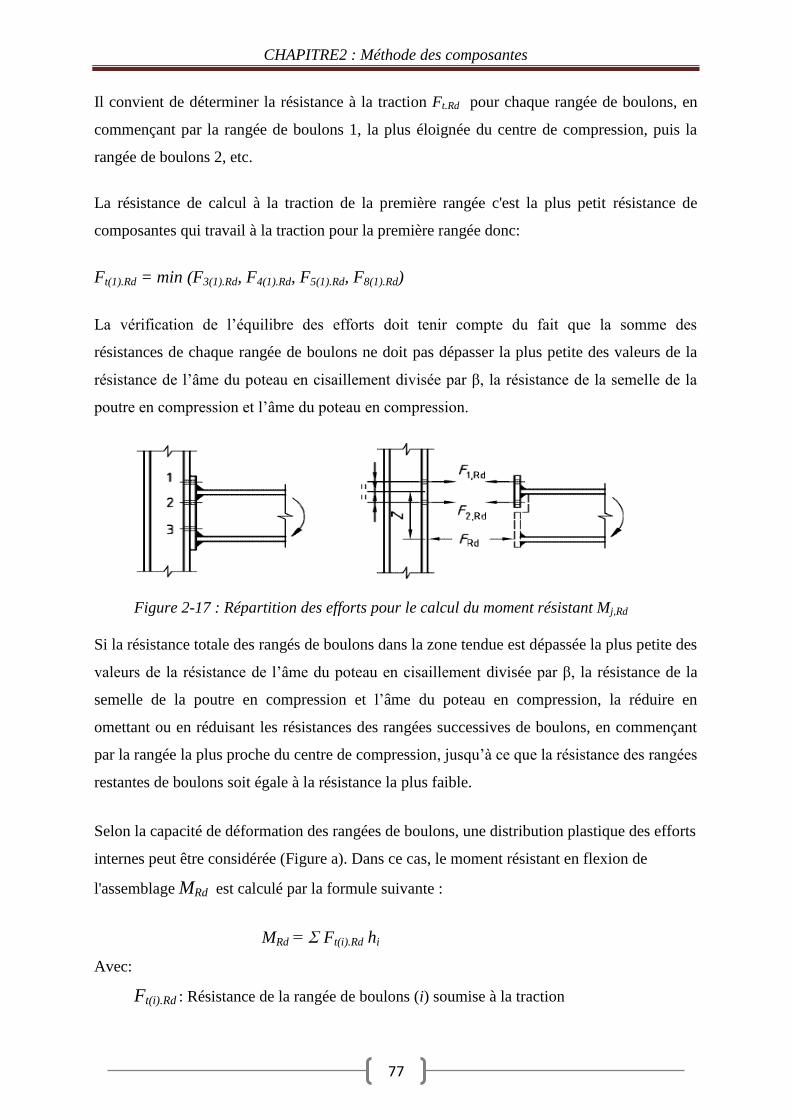
CHAPITRE2 : Méthode des composantes
77
Il convient de déterminer la résistance à la traction Ft.Rd pour chaque rangée de boulons, en
commençant par la rangée de boulons 1, la plus éloignée du centre de compression, puis la
rangée de boulons 2, etc.
La résistance de calcul à la traction de la première rangée c'est la plus petit résistance de
composantes qui travail à la traction pour la première rangée donc:
Ft(1).Rd = min (F3(1).Rd, F4(1).Rd, F5(1).Rd, F8(1).Rd)
La vérification de l’équilibre des efforts doit tenir compte du fait que la somme des
résistances de chaque rangée de boulons ne doit pas dépasser la plus petite des valeurs de la
résistance de l’âme du poteau en cisaillement divisée par β, la résistance de la semelle de la
poutre en compression et l’âme du poteau en compression.
Figure 2-17 : Répartition des efforts pour le calcul du moment résistant Mj,Rd
Si la résistance totale des rangés de boulons dans la zone tendue est dépassée la plus petite des
valeurs de la résistance de l’âme du poteau en cisaillement divisée par β, la résistance de la
semelle de la poutre en compression et l’âme du poteau en compression, la réduire en
omettant ou en réduisant les résistances des rangées successives de boulons, en commençant
par la rangée la plus proche du centre de compression, jusqu’à ce que la résistance des rangées
restantes de boulons soit égale à la résistance la plus faible.
Selon la capacité de déformation des rangées de boulons, une distribution plastique des efforts
internes peut être considérée (Figure a). Dans ce cas, le moment résistant en flexion de
l'assemblage MRd est calculé par la formule suivante :
MRd = Σ Ft(i).Rd hi
Avec:
Ft(i).Rd : Résistance de la rangée de boulons (i) soumise à la traction
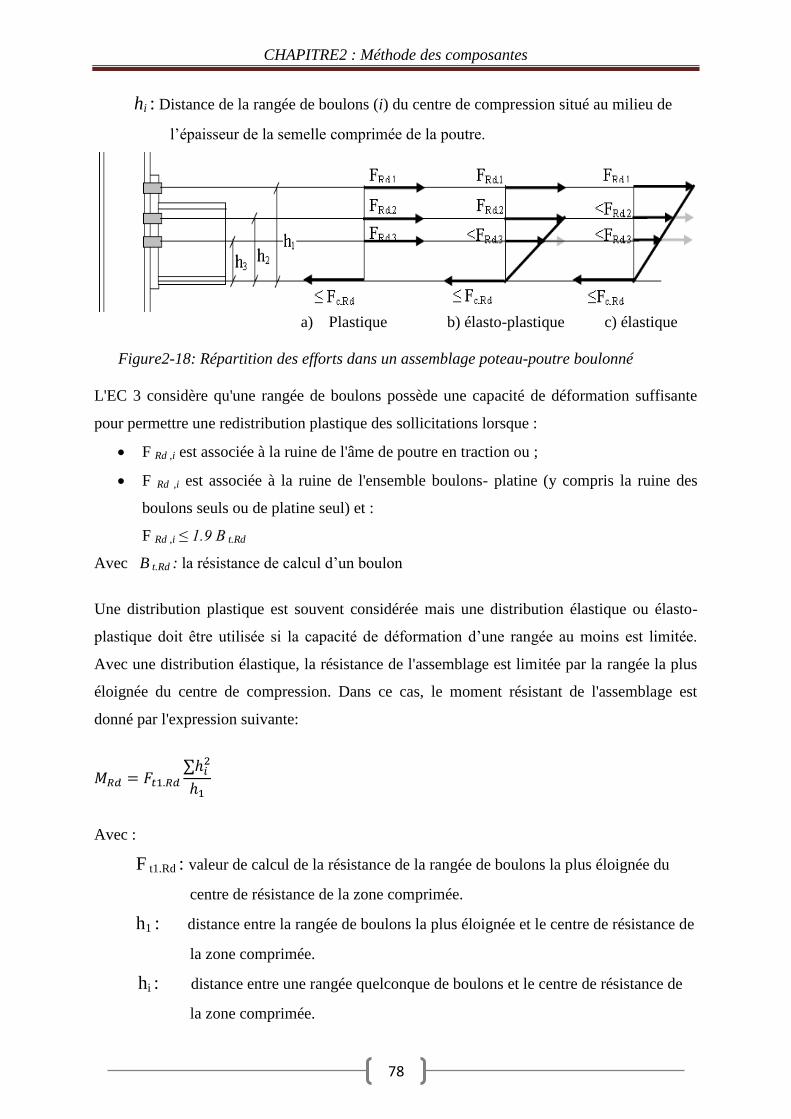
CHAPITRE2 : Méthode des composantes
78
hi : Distance de la rangée de boulons (i) du centre de compression situé au milieu de
l’épaisseur de la semelle comprimée de la poutre.
a) Plastique b) élasto-plastique c) élastique
Figure2-18: Répartition des efforts dans un assemblage poteau-poutre boulonné
L'EC 3 considère qu'une rangée de boulons possède une capacité de déformation suffisante
pour permettre une redistribution plastique des sollicitations lorsque :
F Rd ,i est associée à la ruine de l'âme de poutre en traction ou ;
F Rd ,i est associée à la ruine de l'ensemble boulons- platine (y compris la ruine des
boulons seuls ou de platine seul) et :
F Rd ,i ≤ 1.9 B t.Rd
Avec B t.Rd : la résistance de calcul d’un boulon
Une distribution plastique est souvent considérée mais une distribution élastique ou élasto-
plastique doit être utilisée si la capacité de déformation d’une rangée au moins est limitée.
Avec une distribution élastique, la résistance de l'assemblage est limitée par la rangée la plus
éloignée du centre de compression. Dans ce cas, le moment résistant de l'assemblage est
donné par l'expression suivante:
Avec :
F t1.Rd : valeur de calcul de la résistance de la rangée de boulons la plus éloignée du
centre de résistance de la zone comprimée.
h1 : distance entre la rangée de boulons la plus éloignée et le centre de résistance de
la zone comprimée.
hi : distance entre une rangée quelconque de boulons et le centre de résistance de
la zone comprimée.
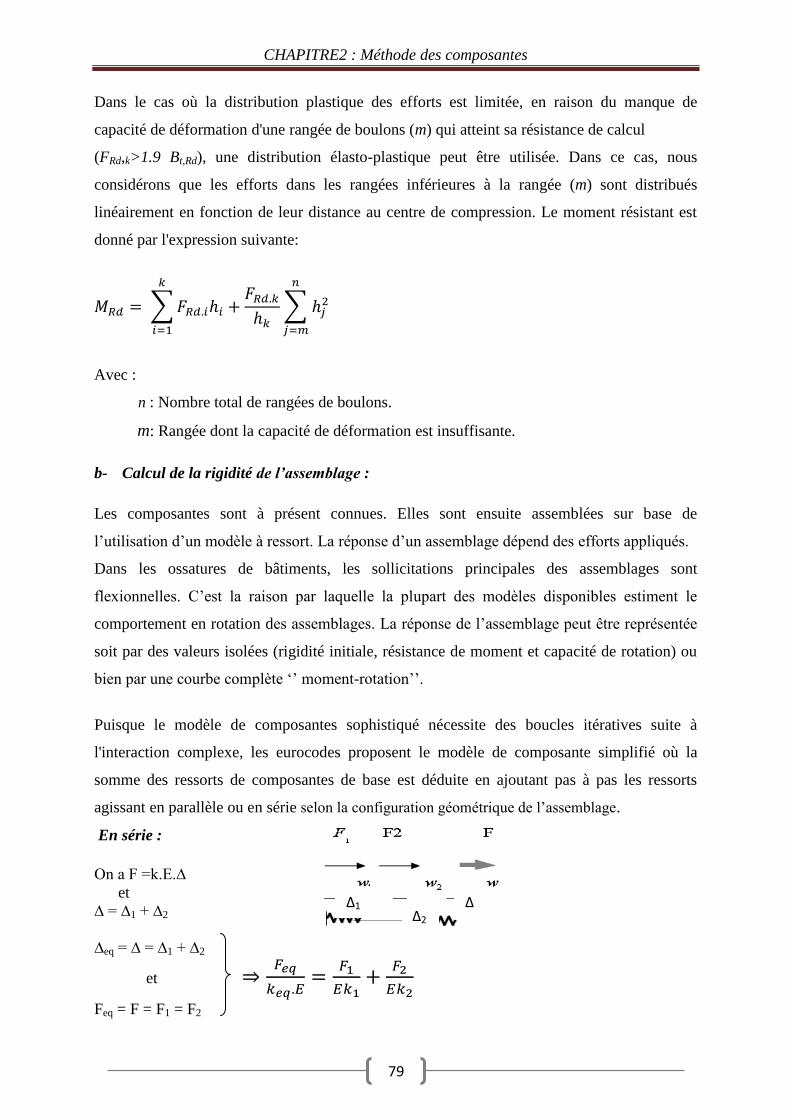
CHAPITRE2 : Méthode des composantes
79
Dans le cas où la distribution plastique des efforts est limitée, en raison du manque de
capacité de déformation d'une rangée de boulons (m) qui atteint sa résistance de calcul
(FRd,k>1.9 Bt,Rd), une distribution élasto-plastique peut être utilisée. Dans ce cas, nous
considérons que les efforts dans les rangées inférieures à la rangée (m) sont distribués
linéairement en fonction de leur distance au centre de compression. Le moment résistant est
donné par l'expression suivante:
Avec :
n : Nombre total de rangées de boulons.
m: Rangée dont la capacité de déformation est insuffisante.
b- Calcul de la rigidité de l’assemblage :
Les composantes sont à présent connues. Elles sont ensuite assemblées sur base de
l’utilisation d’un modèle à ressort. La réponse d’un assemblage dépend des efforts appliqués.
Dans les ossatures de bâtiments, les sollicitations principales des assemblages sont
flexionnelles. C’est la raison par laquelle la plupart des modèles disponibles estiment le
comportement en rotation des assemblages. La réponse de l’assemblage peut être représentée
soit par des valeurs isolées (rigidité initiale, résistance de moment et capacité de rotation) ou
bien par une courbe complète ‘’ moment-rotation’’.
Puisque le modèle de composantes sophistiqué nécessite des boucles itératives suite à
l'interaction complexe, les eurocodes proposent le modèle de composante simplifié où la
somme des ressorts de composantes de base est déduite en ajoutant pas à pas les ressorts
agissant en parallèle ou en série selon la configuration géométrique de l’assemblage.
En série :
On a F =k.E.∆
et
∆ = ∆1 + ∆2
∆eq = ∆ = ∆1 + ∆2
et
Feq = F = F1 = F2
∆1 ∆2
∆
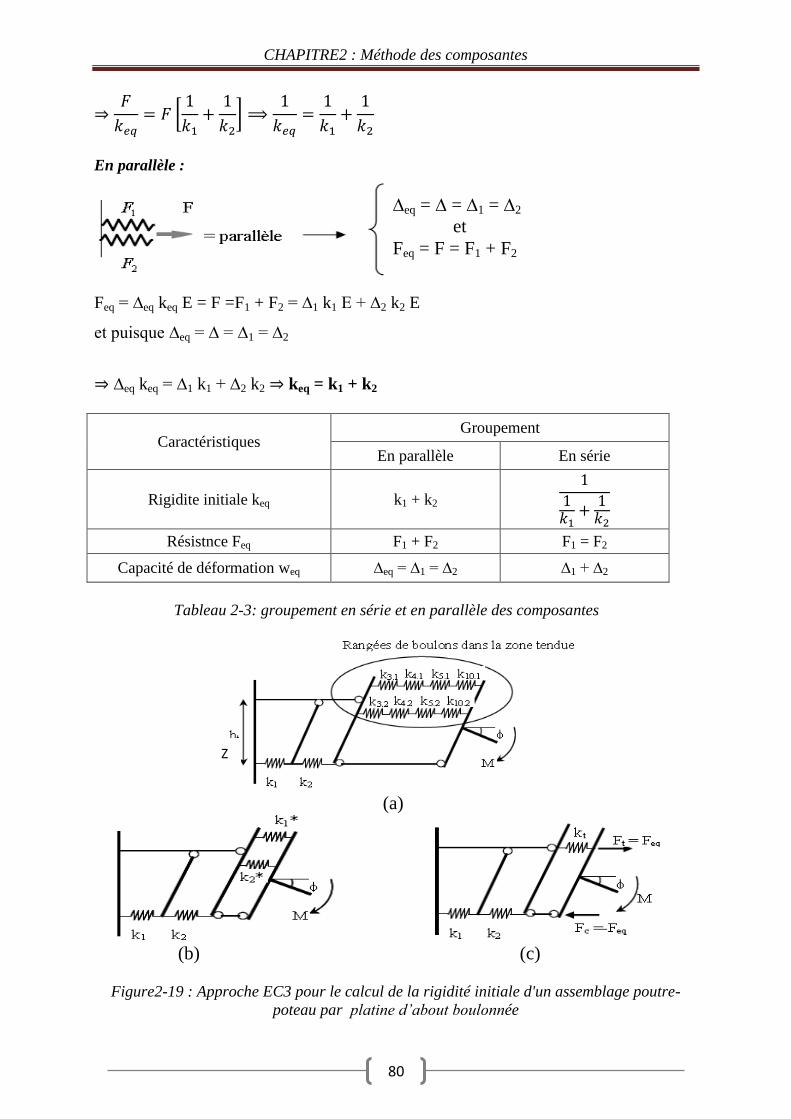
CHAPITRE2 : Méthode des composantes
80
En parallèle :
Feq = ∆eq keq E = F =F1 + F2 = ∆1 k1 E + ∆2 k2 E
et puisque ∆eq = ∆ = ∆1 = ∆2
∆eq keq = ∆1 k1 + ∆2 k2 keq = k1 + k2
Caractéristiques Groupement
En parallèle En série
Rigidite initiale keq k1 + k2
Résistnce Feq F1 + F2 F1 = F2
Capacité de déformation weq ∆eq = ∆1 = ∆2 ∆1 + ∆2
Tableau 2-3: groupement en série et en parallèle des composantes
(a)
(b) (c)
Figure2-19 : Approche EC3 pour le calcul de la rigidité initiale d'un assemblage poutre-
poteau par platine d’about boulonnée
∆eq = ∆ = ∆1 = ∆2
et
Feq = F = F1 + F2
Z
CHAPITRE2 : Méthode des composantes
81
Le comportement de chaque rangée de boulons (i) cumule les contributions des composantes
qui dépendent du nombre de boulons en traction et de la position de chaque rangée. Ces
composantes sont : l'âme du poteau en traction, la semelle du poteau en flexion, la platine
d’about en flexion et les boulons en traction avec leurs coefficients de rigidité (ki) associés en
série (Figure a). Pour chaque rangée de boulon en traction, les coefficients de rigidité de
diverses composantes constituant cette rangée peuvent être regroupés pour n’avoir qu’un seul
coefficient de rigidité Ki* par rangée de boulon (Figure b) ; nous en déduisons pour chaque
rangée de boulon :
Dans le cas où plusieurs rangées sont tendues simultanément dans un assemblage, les rigidités
équivalentes de toutes les rangées tendues sont regroupées en parallèle de façon qu’on
n’introduise qu'un seul coefficient de rigidité équivalente (Figure c).
Où :
Ki*: est la rigidité efficace de la rangée i de boulons
hi : est la distance entre le centre de compression et la rangée i de boulons.
En supposant que le centre de compression est situé au centre de la semelle comprimée de la
poutre et en tenant compte de la position de chaque rangée de boulons (hi), le bras de levier
équivalent (z) est défini par :
Finalement, la contribution de toutes les composantes est obtenue par la combinaison des
rigidités des deux premières composantes (âme du poteau en cisaillement et âme du poteau en
compression) avec les composantes dépendant des rangées de boulons (kt). En considérant
que la position du ressort final est située au niveau du centre de traction défini par le bras de
levier (z), la rigidité en rotation kɸ du ressort pour l'assemblage entier est obtenue par la
formule suivante :

CHAPITRE2 : Méthode des composantes
82
Il convient de signaler que le coefficient de rigidité k2, qui représente l'âme comprimée du
poteau, prend une valeur infinie en présence d'un raidisseur transversal d'âme comprimée. Par
contre, le coefficient de rigidité k1 qui traduit le cisaillement du panneau d'âme dépend de la
configuration de l'assemblage et des conditions du chargement (chargement symétrique ou non).
L'équation précédent permet d'obtenir la rigidité initiale Sj.ini de l'assemblage comme étant
égale à :
Sj.ini = E Kφ
La somme des efforts de traction dans les boulons de la zone tendue et l'effort de compression
dans la zone comprimée de l'assemblage sont égaux et de signes opposés lorsque
l’assemblage est sollicité en flexion sans effort normal. Ainsi, le moment transmis par
l'assemblage est équivalent statiquement à deux forces ± Feq (Feq = Ft et -Feq = Fc ) telles que:
M = Feq Z
Par ailleurs, la rotation de l'assemblage due à la flexion est donnée par :
Avec : ∆t : Allongement du ressort unique de rigidité kt
∆c : Raccourcissement du ressort kc représentant la zone comprimée de l'âme du poteau.
En fonction du rapport de rigidité en rotation non dimensionnel α = S(j.ini) / (EIb / Lb),
l'assemblage poutre-poteau peut être classé comme étant rigide, semi-rigide ou articulé. Il est
considéré semi-rigide pour des valeurs de K situées dans les intervalles suivants :
0,5 ≤ α ≤ 25 pour les structures non contreventées
0,5 ≤ α ≤ 8 pour les structures contreventées.
Avec : Lb et Ib sont la longueur et l'inertie de la poutre, respectivement.
En fin, en résume la méthode des composantes pour ce type d’assemblage dans le tableau
suivant :
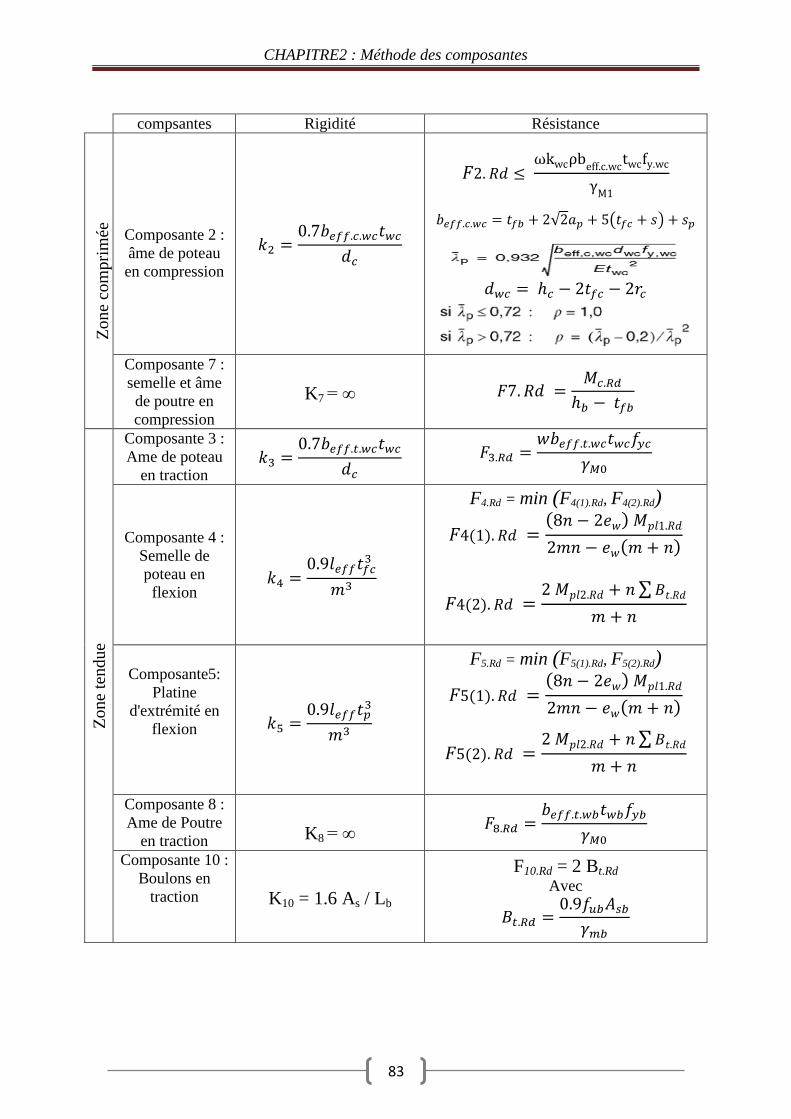
CHAPITRE2 : Méthode des composantes
83
compsantes Rigidité Résistance
Zo
ne
com
pri
mée
Composante 2 :
âme de poteau
en compression
Composante 7 :
semelle et âme
de poutre en
compression
K7 = ∞
Zo
ne
ten
du
e
Composante 3 :
Ame de poteau
en traction
Composante 4 :
Semelle de
poteau en
flexion
F4.Rd = min (F4(1).Rd, F4(2).Rd)
Composante5:
Platine
d'extrémité en
flexion
F5.Rd = min (F5(1).Rd, F5(2).Rd)
Composante 8 :
Ame de Poutre
en traction
K8 = ∞
Composante 10 :
Boulons en
traction
K10 = 1.6 As / Lb
F10.Rd = 2 Bt.Rd
Avec

CHAPITRE2 : Méthode des composantes
84
Zone
cisa
illé
e:
Composante 01 :
Ame du poteau
en cisaillement
Avc : est l'aire de cisaillement du poteau
Avc = Ac – 2bc tfc + (twc + 2rc) tfc
Assemblage
des
Composantes
Si Mj.sd ≤2/3 Mj.Rd j=Sj.ini
Si 2/3 Mj.Rd ≤ Mj.sd ≤ Mj.Rd
FRd = min FRd(i)
moment de résistance plastique :
MRd = FRd h
moment de résistance élastique :
MRd
Tableau2-4: Tableau récapitulatif de la méthode des composantes pour un assemblage avec
platine d’extrémité débordante
2-4-4 Détermination de la capacité de rotation :
L’EC3 ne propose pas de formule permettant de calculer la capacité de rotation des
assemblages boulonnés. Cependant, le règlement stipule que dans un assemblage par platine
d’about boulonnée, la capacité de rotation est suffisante pour une analyse plastique si le
moment résistant de l'assemblage est piloté par la résistance de la semelle du poteau en
flexion dont l'épaisseur t doit satisfaire la condition suivante :
Avec :
d : Diamètre nominal du boulon
f ub : Résistance ultime du boulon en traction
fy : Limite d'élasticité.
Si la résistance de calcul de cet assemblage est au moins égale 1,2 fois la résistance plastique
de calcul de la poutre, il n'est pas nécessaire de vérifier sa capacité de rotation. Dans le cas
d'un assemblage à résistance partielle, la capacité de rotation ne doit pas être inférieure à celle
nécessaire pour permettre le développement de toutes les rotules plastiques.
CHAPITRE 2
Approche analytique de calcul des assemblages selonl’EC3 (Méthode des composantes)
CHAPITRE3 : Modélisation mathématique des courbes de déformabilité des assemblages
86
3-1 Introduction :
La prise en compte des caractères semi-rigide et résistance partielle des nœuds poutre-poteau
lors du dimensionnement d’une ossature métallique nécessite la détermination préalable de
leurs courbes de comportement caractéristiques.
Selon le type d'analyse structurelle nécessaire, on peut utiliser les représentations des courbes
moment-rotation notamment linéaire, bilinéaire, multilinéaire et non linéaire. La
représentation la plus exacte utilise des fonctions continues non linéaires, bien que la
représentation multilinéaire est couramment utilisé pour les modèles mécaniques [12].
Le reproche qui peut être adressé aux courbes multi-linéaires est assurément la modification
soudaine, brutale et surtout peu réaliste de rigidité à l’intersection de deux zones à rigidité
constante ainsi que l’écart parfois important existant entre la courbe réelle et le modèle multi-
linéaire dans certaines zones de rotation. Ces défauts sont inhérents au type de modélisation
adopté : segments de droite reliant des niveaux caractéristiques de charge et de déformation.
Le passage des courbes multi-linéaires à des courbes d’allure plus continue par l’intermédiaire
d’expressions mathématiques adéquates permettra d’éviter ces problèmes [17].
La validité ainsi que la précision des modèles mathématiques de prédiction des courbes non
linéaires de comportement des nœuds, ou de certaines de leurs caractéristiques, ne peuvent
être démontrées que par l’intermédiaire de comparaisons avec des résultats d’essais
expérimentaux de nœuds en vraie grandeur [17]. L’utilisation des donnés expérimentaux
(Goverdhan 1983 ;Nethercot 1985a ;Kishi and Chen 1986 ;Chen and Kishi 1989a) [6] est
permet de développer plusieurs modèle mathématique .
3-2 Base de données des assemblages:
La base de données des assemblages est une collection de tests expérimentaux pour plusieurs
types d’assemblages poutre-poteau. Ces données sont compilées avec les informations
correspondantes tel que : les dimensions de la poutre, de poteau et de l’assemblage. Le type
d'acier utilisé, les chercheurs qui ont mené l'essai et la date à laquelle les expériences ont été
réalisées sont également inclus [6].
De nombreux tests ont été effectués. Jones et al (1980, 1983) a recueilli un total de 323 tests
de 29 études. En fonction de ces données de test, Nethercot (1985a, 1985b) a examiné et
évalué plus de 800 tests individuels de plus de 70 articles expérimentaux.
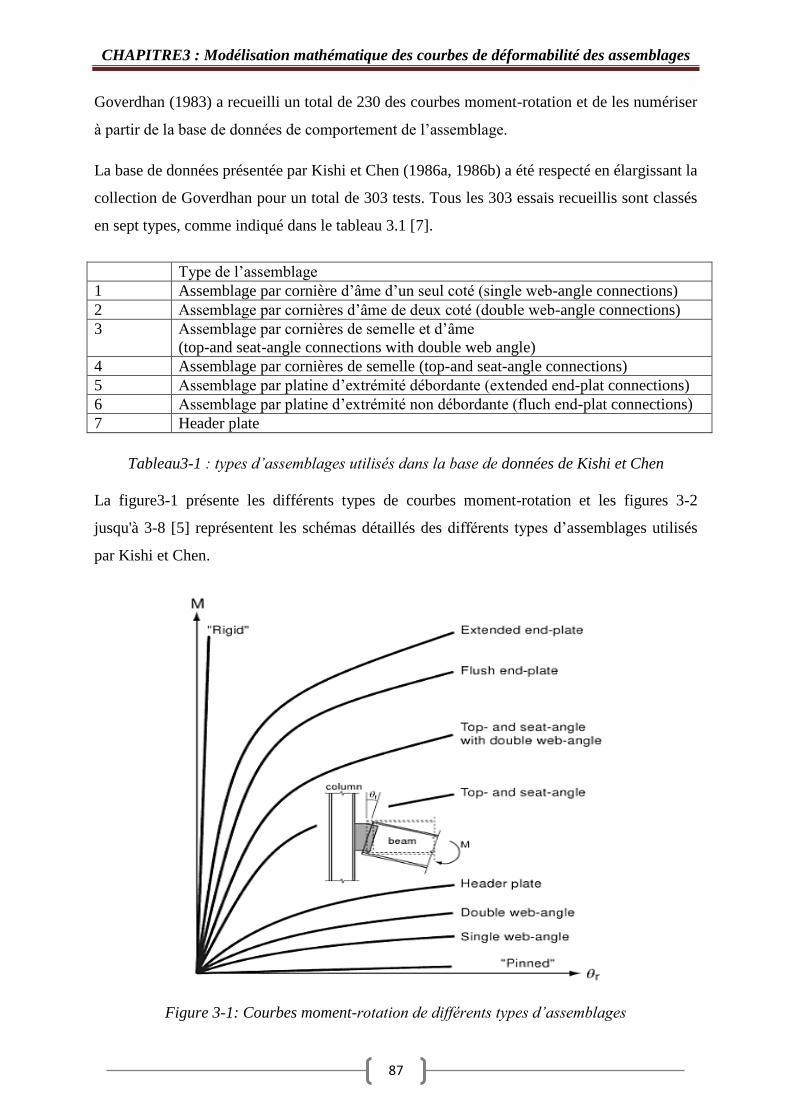
CHAPITRE3 : Modélisation mathématique des courbes de déformabilité des assemblages
87
Goverdhan (1983) a recueilli un total de 230 des courbes moment-rotation et de les numériser
à partir de la base de données de comportement de l’assemblage.
La base de données présentée par Kishi et Chen (1986a, 1986b) a été respecté en élargissant la
collection de Goverdhan pour un total de 303 tests. Tous les 303 essais recueillis sont classés
en sept types, comme indiqué dans le tableau 3.1 [7].
Type de l’assemblage
1 Assemblage par cornière d’âme d’un seul coté (single web-angle connections)
2 Assemblage par cornières d’âme de deux coté (double web-angle connections)
3 Assemblage par cornières de semelle et d’âme
(top-and seat-angle connections with double web angle)
4 Assemblage par cornières de semelle (top-and seat-angle connections)
5 Assemblage par platine d’extrémité débordante (extended end-plat connections)
6 Assemblage par platine d’extrémité non débordante (fluch end-plat connections)
7 Header plate
Tableau3-1 : types d’assemblages utilisés dans la base de données de Kishi et Chen
La figure3-1 présente les différents types de courbes moment-rotation et les figures 3-2
jusqu'à 3-8 [5] représentent les schémas détaillés des différents types d’assemblages utilisés
par Kishi et Chen.
Figure 3-1: Courbes moment-rotation de différents types d’assemblages
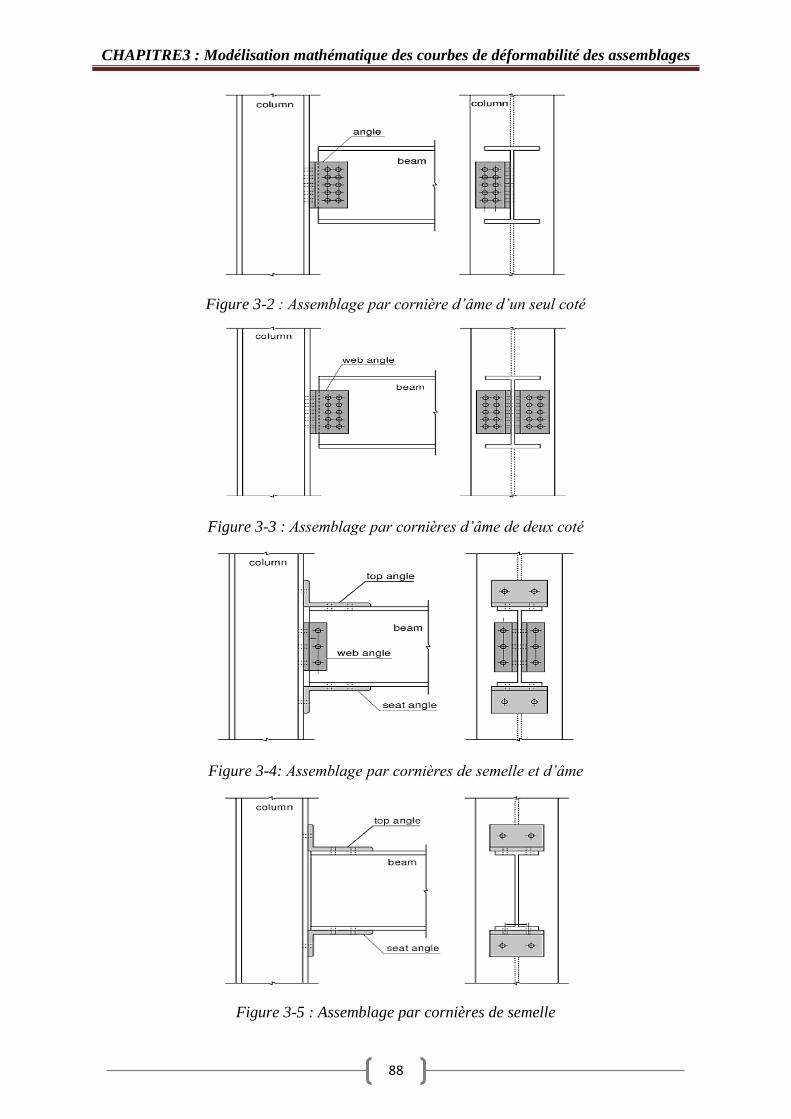
CHAPITRE3 : Modélisation mathématique des courbes de déformabilité des assemblages
88
Figure 3-2 : Assemblage par cornière d’âme d’un seul coté
Figure 3-3 : Assemblage par cornières d’âme de deux coté
Figure 3-4: Assemblage par cornières de semelle et d’âme
Figure 3-5 : Assemblage par cornières de semelle
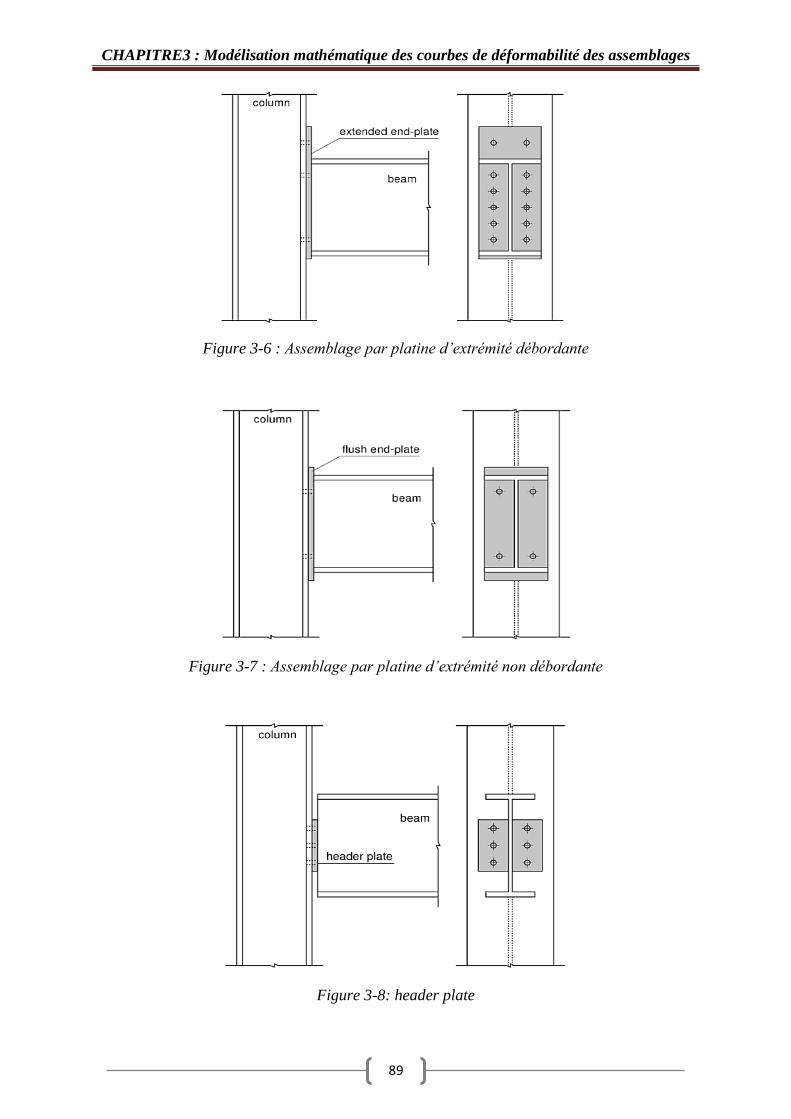
CHAPITRE3 : Modélisation mathématique des courbes de déformabilité des assemblages
89
Figure 3-6 : Assemblage par platine d’extrémité débordante
Figure 3-7 : Assemblage par platine d’extrémité non débordante
Figure 3-8: header plate

CHAPITRE3 : Modélisation mathématique des courbes de déformabilité des assemblages
90
3-4 Comportement sous chargement monotone :
3-4-1 Modèle linéaire :
Le modèle linéaire (Rathbun, 1963, etc) utilise la rigidité initiale de connexion Rki pour
représenter le comportement de l’assemblage comme indiqué dans la figure 3-8 a. Bien que ce
modèle est facile à appliquer le comportement moment-rotation, il surestime la rigidité de
l’assemblage dans la petite rotation.
Tarpy et Cardinal (1981), Melchers et Kaur, et Lui et Chen (1986) ont également proposé le
modèle bilinéaire (figure 3-8b), dans lequel la pente initiale de la courbe moment-rotation est
remplacée par une ligne profonde à un certain moment de transition.
Razzaq (1983) a proposé un modèle multilinéaire par morceaux (figure 3-8 d), dans lequel la
non-linéarité de la courbe moment-rotation est approchée par une série de segments de droite.
Bien que ces modèles linéaires sont faciles à utiliser, les inexactitudes et les sauts de rigidité
au niveau des passages rendre indésirable [5].
Figure3-9 : représentation mathématique de différent courbes moment-rotation :(a) modèle
linéaire, (b) modèle bilinéaire, (c) modèle non linéaire, (d) modèle multilinéaire
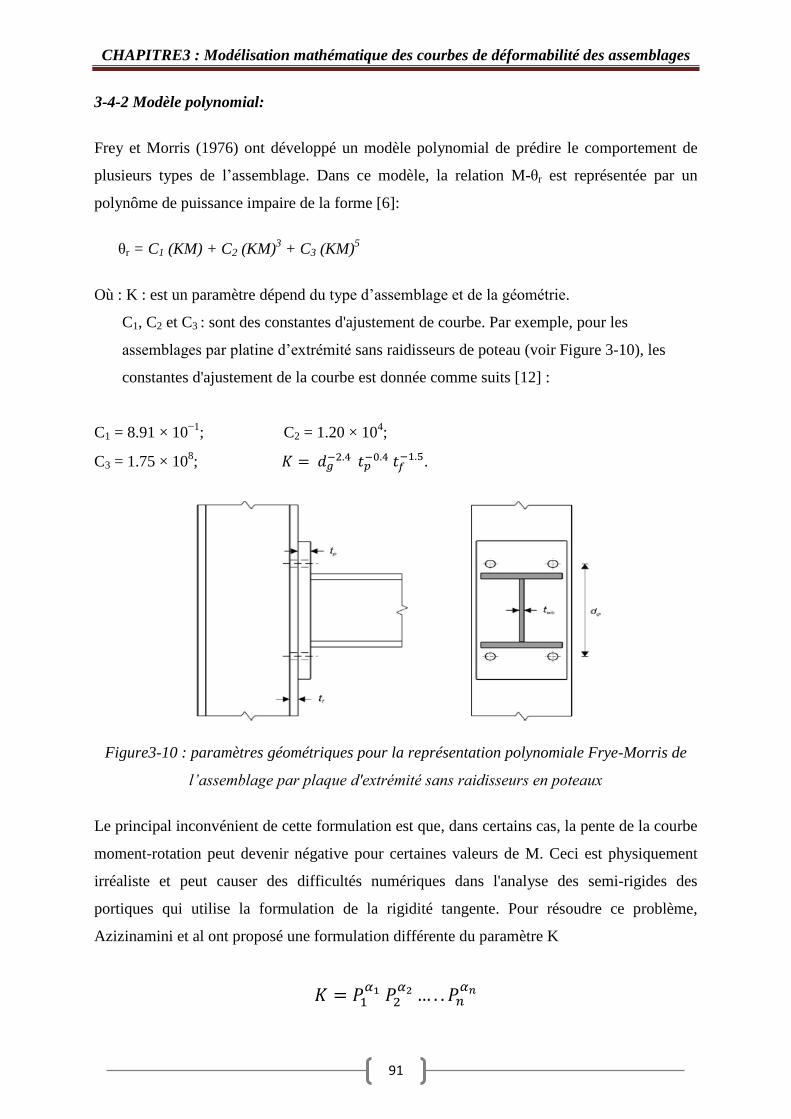
CHAPITRE3 : Modélisation mathématique des courbes de déformabilité des assemblages
91
3-4-2 Modèle polynomial:
Frey et Morris (1976) ont développé un modèle polynomial de prédire le comportement de
plusieurs types de l’assemblage. Dans ce modèle, la relation M-θr est représentée par un
polynôme de puissance impaire de la forme [6]:
θr = C1 (KM) + C2 (KM)3 + C3 (KM)
5
Où : K : est un paramètre dépend du type d’assemblage et de la géométrie.
C1, C2 et C3 : sont des constantes d'ajustement de courbe. Par exemple, pour les
assemblages par platine d’extrémité sans raidisseurs de poteau (voir Figure 3-10), les
constantes d'ajustement de la courbe est donnée comme suits [12] :
C1 = 8.91 × 10−1
; C2 = 1.20 × 104;
C3 = 1.75 × 108;
.
Figure3-10 : paramètres géométriques pour la représentation polynomiale Frye-Morris de
l’assemblage par plaque d'extrémité sans raidisseurs en poteaux
Le principal inconvénient de cette formulation est que, dans certains cas, la pente de la courbe
moment-rotation peut devenir négative pour certaines valeurs de M. Ceci est physiquement
irréaliste et peut causer des difficultés numériques dans l'analyse des semi-rigides des
portiques qui utilise la formulation de la rigidité tangente. Pour résoudre ce problème,
Azizinamini et al ont proposé une formulation différente du paramètre K
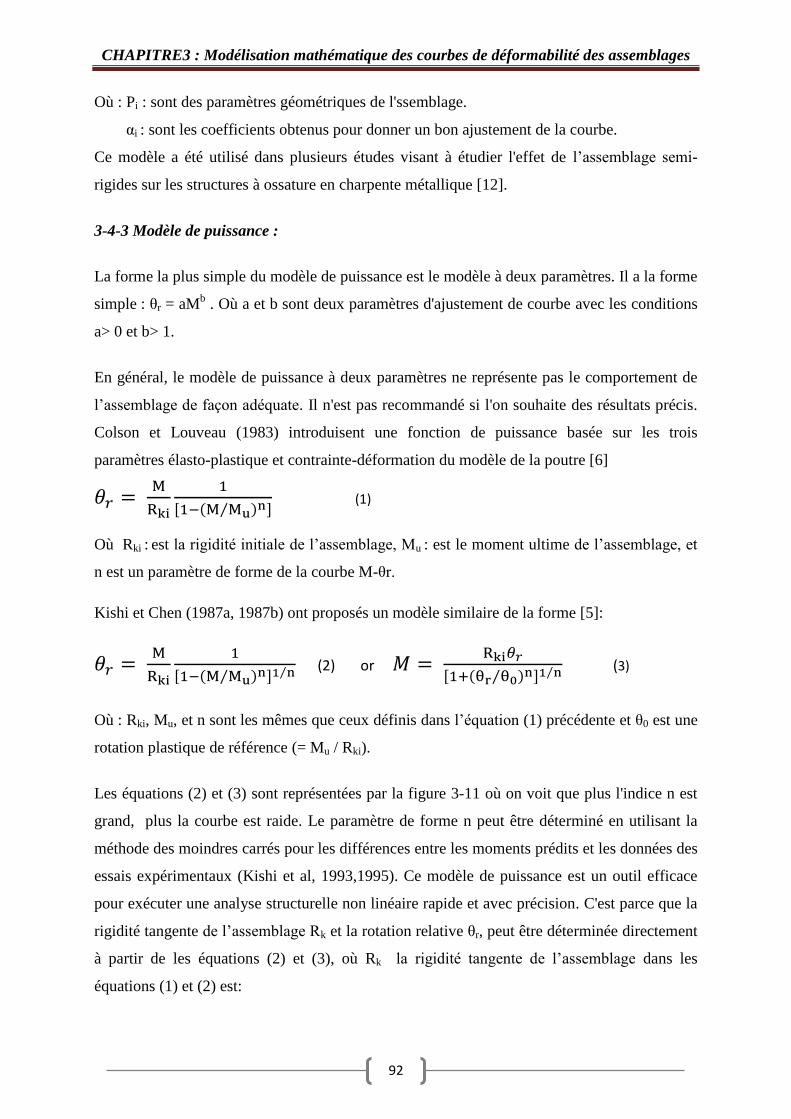
CHAPITRE3 : Modélisation mathématique des courbes de déformabilité des assemblages
92
Où : Pi : sont des paramètres géométriques de l'ssemblage.
αi : sont les coefficients obtenus pour donner un bon ajustement de la courbe.
Ce modèle a été utilisé dans plusieurs études visant à étudier l'effet de l’assemblage semi-
rigides sur les structures à ossature en charpente métallique [12].
3-4-3 Modèle de puissance :
La forme la plus simple du modèle de puissance est le modèle à deux paramètres. Il a la forme
simple : θr = aMb . Où a et b sont deux paramètres d'ajustement de courbe avec les conditions
a> 0 et b> 1.
En général, le modèle de puissance à deux paramètres ne représente pas le comportement de
l’assemblage de façon adéquate. Il n'est pas recommandé si l'on souhaite des résultats précis.
Colson et Louveau (1983) introduisent une fonction de puissance basée sur les trois
paramètres élasto-plastique et contrainte-déformation du modèle de la poutre [6]
(1)
Où Rki : est la rigidité initiale de l’assemblage, Mu : est le moment ultime de l’assemblage, et
n est un paramètre de forme de la courbe M-θr.
Kishi et Chen (1987a, 1987b) ont proposés un modèle similaire de la forme [5]:
(2) or
(3)
Où : Rki, Mu, et n sont les mêmes que ceux définis dans l’équation (1) précédente et θ0 est une
rotation plastique de référence (= Mu / Rki).
Les équations (2) et (3) sont représentées par la figure 3-11 où on voit que plus l'indice n est
grand, plus la courbe est raide. Le paramètre de forme n peut être déterminé en utilisant la
méthode des moindres carrés pour les différences entre les moments prédits et les données des
essais expérimentaux (Kishi et al, 1993,1995). Ce modèle de puissance est un outil efficace
pour exécuter une analyse structurelle non linéaire rapide et avec précision. C'est parce que la
rigidité tangente de l’assemblage Rk et la rotation relative θr, peut être déterminée directement
à partir de les équations (2) et (3), où Rk la rigidité tangente de l’assemblage dans les
équations (1) et (2) est:
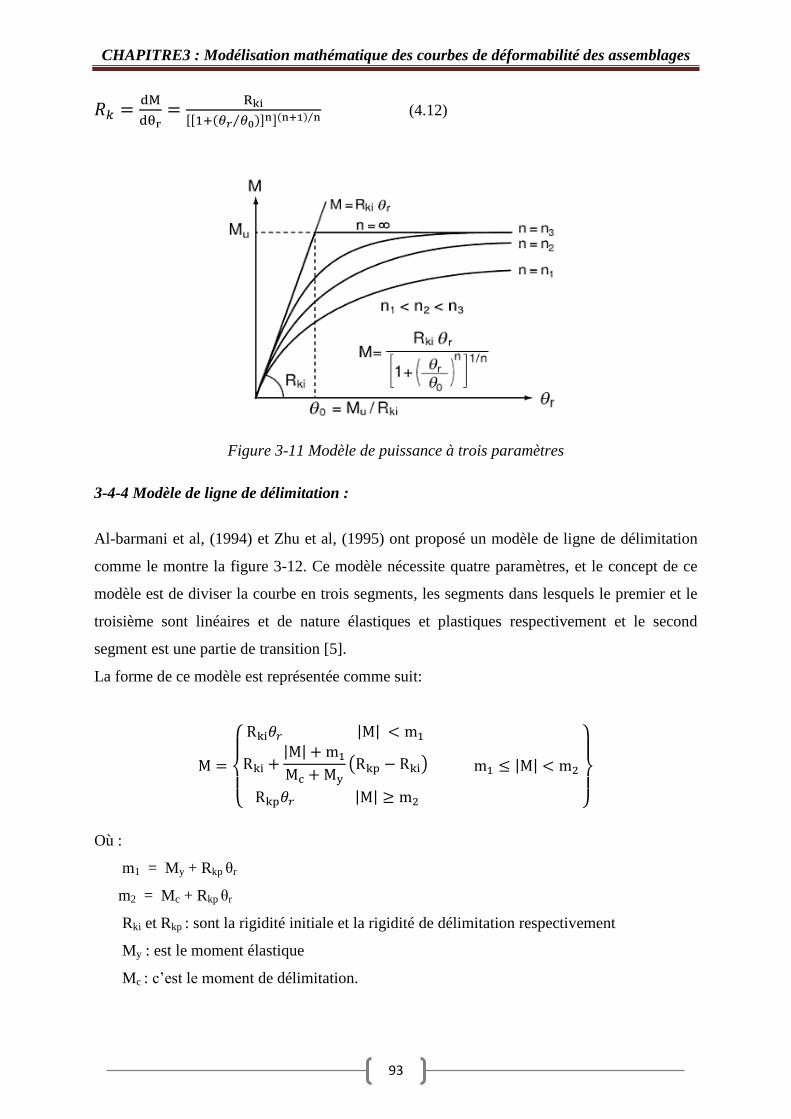
CHAPITRE3 : Modélisation mathématique des courbes de déformabilité des assemblages
93
(4.12)
Figure 3-11 Modèle de puissance à trois paramètres
3-4-4 Modèle de ligne de délimitation :
Al-barmani et al, (1994) et Zhu et al, (1995) ont proposé un modèle de ligne de délimitation
comme le montre la figure 3-12. Ce modèle nécessite quatre paramètres, et le concept de ce
modèle est de diviser la courbe en trois segments, les segments dans lesquels le premier et le
troisième sont linéaires et de nature élastiques et plastiques respectivement et le second
segment est une partie de transition [5].
La forme de ce modèle est représentée comme suit:
Où :
m1 = My + Rkp θr
m2 = Mc + Rkp θr
Rki et Rkp : sont la rigidité initiale et la rigidité de délimitation respectivement
My : est le moment élastique
Mc : c’est le moment de délimitation.
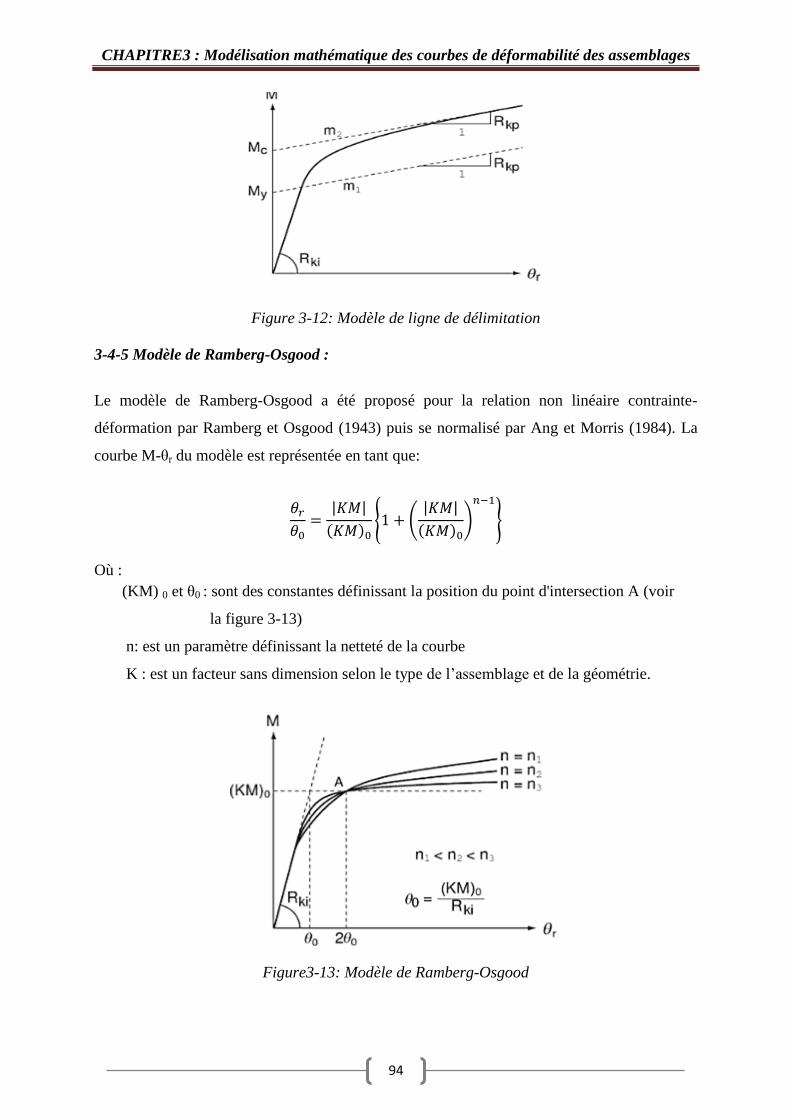
CHAPITRE3 : Modélisation mathématique des courbes de déformabilité des assemblages
94
Figure 3-12: Modèle de ligne de délimitation
3-4-5 Modèle de Ramberg-Osgood :
Le modèle de Ramberg-Osgood a été proposé pour la relation non linéaire contrainte-
déformation par Ramberg et Osgood (1943) puis se normalisé par Ang et Morris (1984). La
courbe M-θr du modèle est représentée en tant que:
Où :
(KM) 0 et θ0 : sont des constantes définissant la position du point d'intersection A (voir
la figure 3-13)
n: est un paramètre définissant la netteté de la courbe
K : est un facteur sans dimension selon le type de l’assemblage et de la géométrie.
Figure3-13: Modèle de Ramberg-Osgood

CHAPITRE3 : Modélisation mathématique des courbes de déformabilité des assemblages
95
3-4-6 Modèle exponentiel:
Lui et Chen (1986) ont proposé le modèle multi-paramètres exponentiel
(1)
Où :
M0 : est la valeur de départ du moment d’assemblage auquel la courbe est stable
Rkf : est la rigidité d'écrouissage de l’assemblage
α: est un facteur de mise à l'échelle (dans le but de stabilité numérique)
Cj : est une constante d'ajustement de courbe obtenue à partir d'une analyse de régression
linéaire.
Ce modèle est une bonne représentation du comportement non linéaire sous charges
monotones. Cependant, s’il ya des changements importants affectant la courbe M-θr, ce
modèle ne peut pas être représenté adéquatement (Wu, 1989) [6].
Kishi et Chen (1986) ont affiné le modèle exponentiel de Lui-Chen pour s'adapter à tout
changement brusque de la pente de la courbe M-θr comme suit :
Où :
M0 et α : sont définis dans l’équation (1)
Dk : est un paramètre constant pour la partie linéaire de la courbe
θk : est la rotation de départ de la composante linéaire de la courbe
H [θ] : est la fonction de Heaviside (H [θ] =1 pour θ ≥ 0, H [θ] =0 pour θ ˂ 0)
Cj, Dk : sont les constantes d'ajustement des courbes obtenues à partir d'une analyse de
régression linéaire (Kishi et Chen, 1986).
Yee et Melchers (1986) ont proposé le modèle exponentiel à quatre paramètres pour
représenter le comportement non-linéaire M-θr des assemblages boulonnés
Où :
Mp : est le moment plastique de l’assemblage
Rki : est la rigidité élastique de l’assemblage initiale
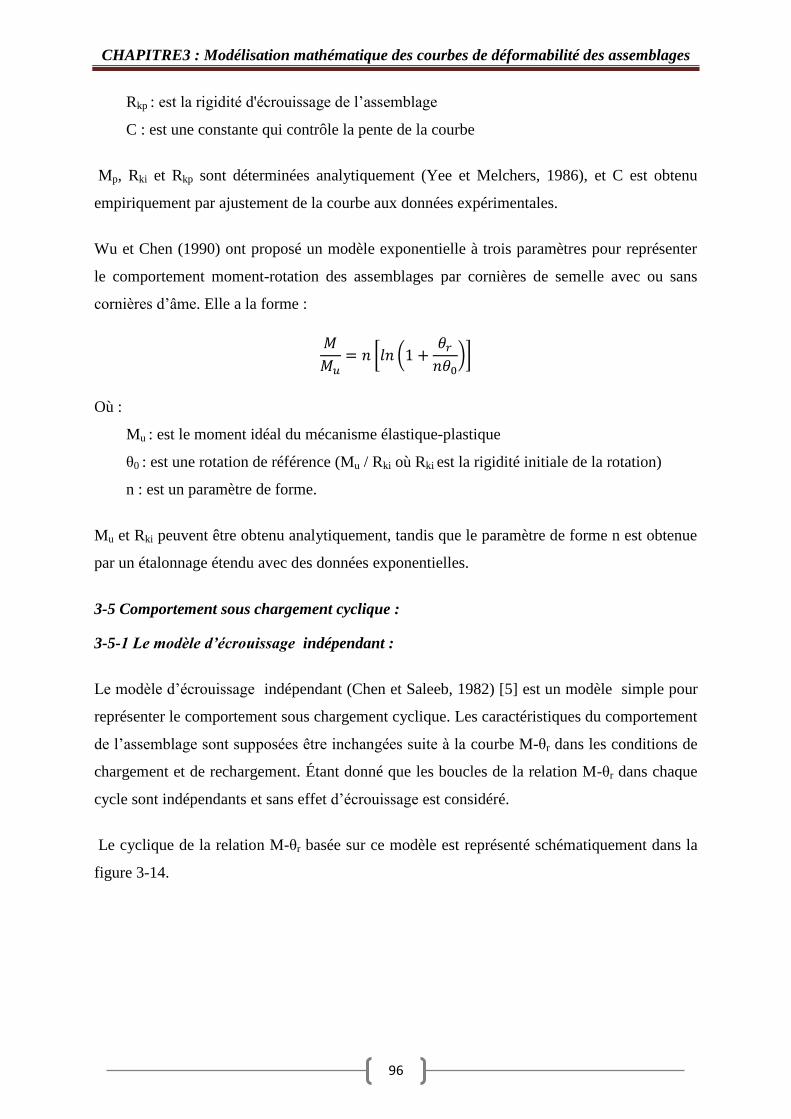
CHAPITRE3 : Modélisation mathématique des courbes de déformabilité des assemblages
96
Rkp : est la rigidité d'écrouissage de l’assemblage
C : est une constante qui contrôle la pente de la courbe
Mp, Rki et Rkp sont déterminées analytiquement (Yee et Melchers, 1986), et C est obtenu
empiriquement par ajustement de la courbe aux données expérimentales.
Wu et Chen (1990) ont proposé un modèle exponentielle à trois paramètres pour représenter
le comportement moment-rotation des assemblages par cornières de semelle avec ou sans
cornières d’âme. Elle a la forme :
Où :
Mu : est le moment idéal du mécanisme élastique-plastique
θ0 : est une rotation de référence (Mu / Rki où Rki est la rigidité initiale de la rotation)
n : est un paramètre de forme.
Mu et Rki peuvent être obtenu analytiquement, tandis que le paramètre de forme n est obtenue
par un étalonnage étendu avec des données exponentielles.
3-5 Comportement sous chargement cyclique :
3-5-1 Le modèle d’écrouissage indépendant :
Le modèle d’écrouissage indépendant (Chen et Saleeb, 1982) [5] est un modèle simple pour
représenter le comportement sous chargement cyclique. Les caractéristiques du comportement
de l’assemblage sont supposées être inchangées suite à la courbe M-θr dans les conditions de
chargement et de rechargement. Étant donné que les boucles de la relation M-θr dans chaque
cycle sont indépendants et sans effet d’écrouissage est considéré.
Le cyclique de la relation M-θr basée sur ce modèle est représenté schématiquement dans la
figure 3-14.

CHAPITRE3 : Modélisation mathématique des courbes de déformabilité des assemblages
97
Figure3-14 : modèle d’écrouissage indépendant
Dans le cas de déchargement dans le point a sur la courbe de charge initiale, l’assemblage est
chargé linéairement jusqu'à M=0 avec la rigidité initiale de l’assemblage Rki. Lorsque le signe
de moment M est changé dans le point b dans le processus de déchargement, l’assemblage
entre dans le processus de chargement arrière. Dans ce cas, le comportement de l’assemblage
(à l'exclusion de la rotation plastique résiduelle) résultant de l'opération de chargement
précédente est supposé coïncider avec celle des assemblages sous chargement monotone.
3-5-2 Modèle d’écrouissage cinématique:
Le modèle d'écrouissage cinématique n’est que le modèle d’écrouissage indépendant en
tenant compte l'effet de l’écrouissage de la matière, le comportement de ce modèle de
l’assemblage est illustré à la figure 3-15, représenté par la pente Rb de la ligne de
l’écrouissage. Dans le cas d'inversion de déchargement, le chemin des courbes M-θr se
déplace le long de la ligne de pente de la rigidité initiale de l’assemblage Rki (par exemple
pour la ligne ab ou cd) jusqu'à ce qu'elle atteigne la ligne de l’écrouissage. Pour plus
d'inversion de déchargement, le chemin suit la non linéarité de la courbe M-θr de l’assemblage
sous le chargement monotone (par exemple, pour la ligne bc ou de). Si la ligne de
l’écrouissage a la pente nulle (c.-à-d Rb = 0), le modèle d'écrouissage cinématique est
exactement le même que le modèle d’écrouissage indépendant.
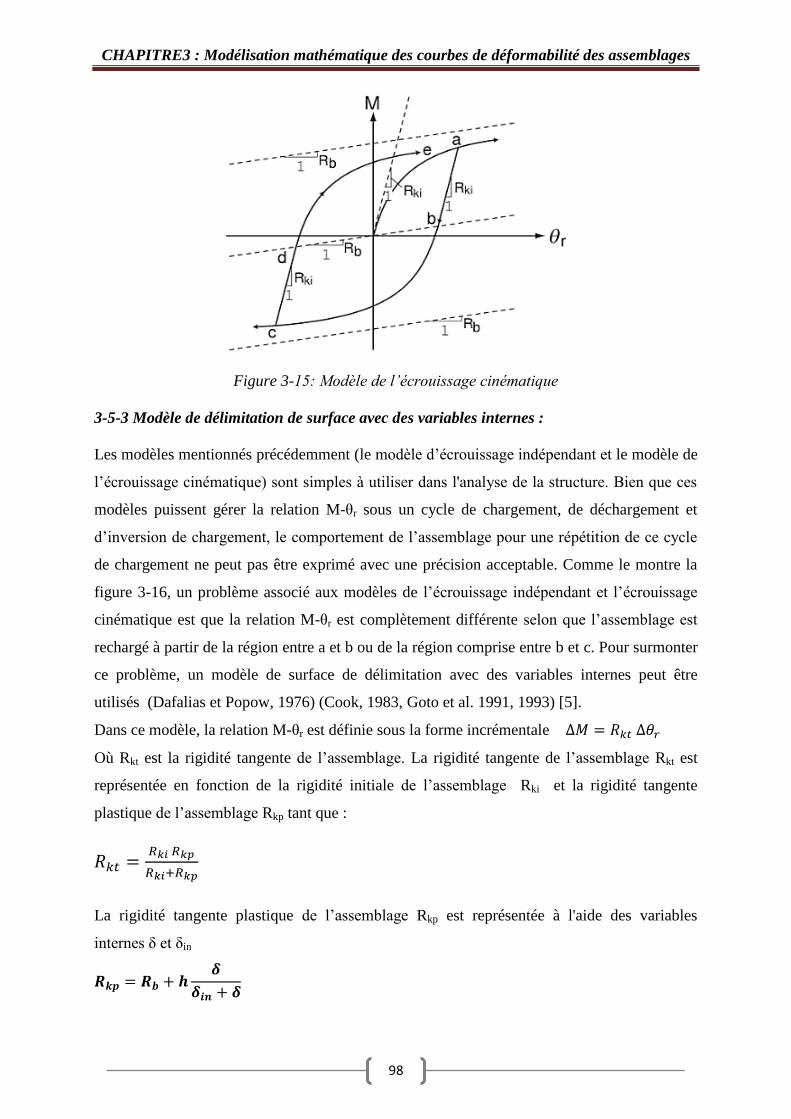
CHAPITRE3 : Modélisation mathématique des courbes de déformabilité des assemblages
98
Figure 3-15: Modèle de l’écrouissage cinématique
3-5-3 Modèle de délimitation de surface avec des variables internes :
Les modèles mentionnés précédemment (le modèle d’écrouissage indépendant et le modèle de
l’écrouissage cinématique) sont simples à utiliser dans l'analyse de la structure. Bien que ces
modèles puissent gérer la relation M-θr sous un cycle de chargement, de déchargement et
d’inversion de chargement, le comportement de l’assemblage pour une répétition de ce cycle
de chargement ne peut pas être exprimé avec une précision acceptable. Comme le montre la
figure 3-16, un problème associé aux modèles de l’écrouissage indépendant et l’écrouissage
cinématique est que la relation M-θr est complètement différente selon que l’assemblage est
rechargé à partir de la région entre a et b ou de la région comprise entre b et c. Pour surmonter
ce problème, un modèle de surface de délimitation avec des variables internes peut être
utilisés (Dafalias et Popow, 1976) (Cook, 1983, Goto et al. 1991, 1993) [5].
Dans ce modèle, la relation M-θr est définie sous la forme incrémentale
Où Rkt est la rigidité tangente de l’assemblage. La rigidité tangente de l’assemblage Rkt est
représentée en fonction de la rigidité initiale de l’assemblage Rki et la rigidité tangente
plastique de l’assemblage Rkp tant que :
La rigidité tangente plastique de l’assemblage Rkp est représentée à l'aide des variables
internes δ et δin
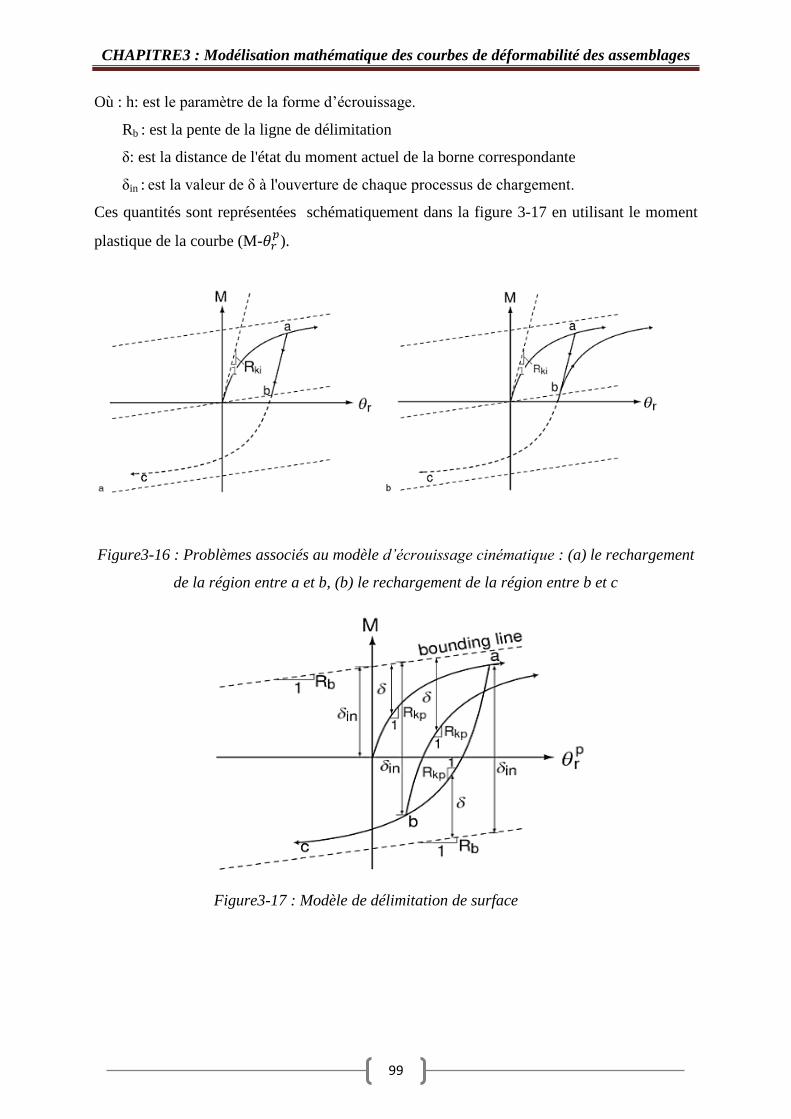
CHAPITRE3 : Modélisation mathématique des courbes de déformabilité des assemblages
99
Où : h: est le paramètre de la forme d’écrouissage.
Rb : est la pente de la ligne de délimitation
δ: est la distance de l'état du moment actuel de la borne correspondante
δin : est la valeur de δ à l'ouverture de chaque processus de chargement.
Ces quantités sont représentées schématiquement dans la figure 3-17 en utilisant le moment
plastique de la courbe (M- ).
Figure3-16 : Problèmes associés au modèle d’écrouissage cinématique : (a) le rechargement
de la région entre a et b, (b) le rechargement de la région entre b et c
Figure3-17 : Modèle de délimitation de surface
CHAPITRE 4
Expérimentation numérique
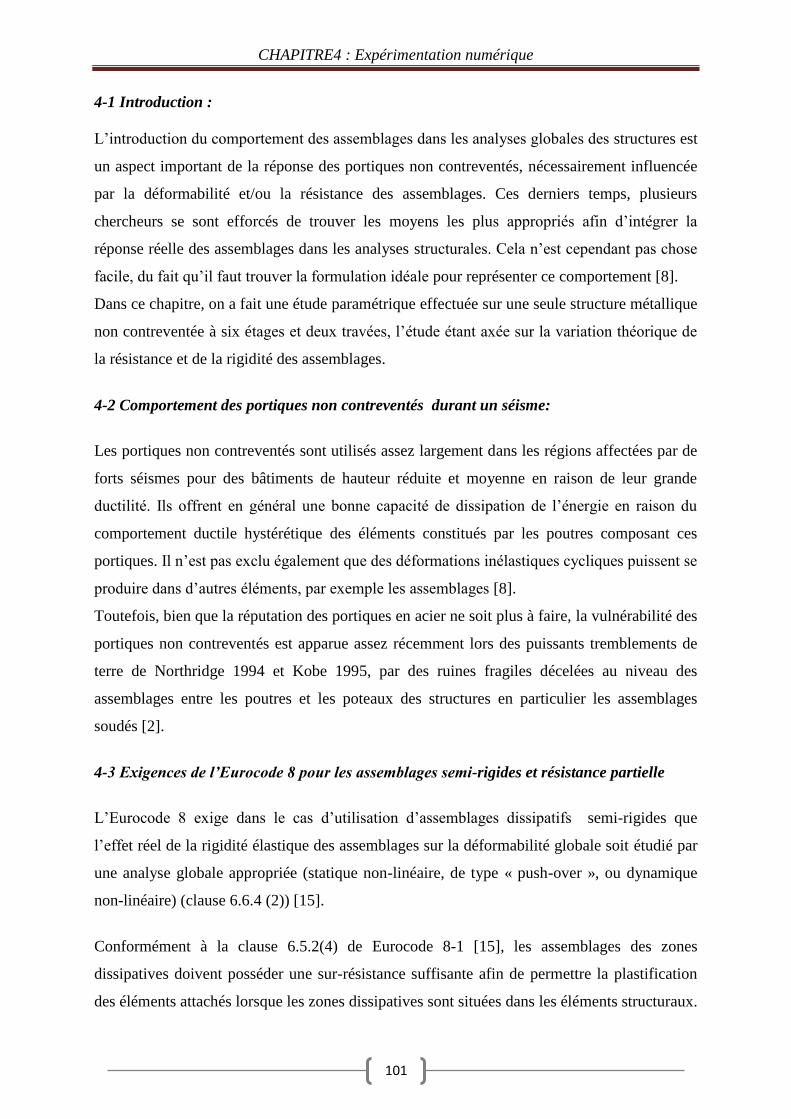
CHAPITRE4 : Expérimentation numérique
101
4-1 Introduction :
L’introduction du comportement des assemblages dans les analyses globales des structures est
un aspect important de la réponse des portiques non contreventés, nécessairement influencée
par la déformabilité et/ou la résistance des assemblages. Ces derniers temps, plusieurs
chercheurs se sont efforcés de trouver les moyens les plus appropriés afin d’intégrer la
réponse réelle des assemblages dans les analyses structurales. Cela n’est cependant pas chose
facile, du fait qu’il faut trouver la formulation idéale pour représenter ce comportement [8].
Dans ce chapitre, on a fait une étude paramétrique effectuée sur une seule structure métallique
non contreventée à six étages et deux travées, l’étude étant axée sur la variation théorique de
la résistance et de la rigidité des assemblages.
4-2 Comportement des portiques non contreventés durant un séisme:
Les portiques non contreventés sont utilisés assez largement dans les régions affectées par de
forts séismes pour des bâtiments de hauteur réduite et moyenne en raison de leur grande
ductilité. Ils offrent en général une bonne capacité de dissipation de l’énergie en raison du
comportement ductile hystérétique des éléments constitués par les poutres composant ces
portiques. Il n’est pas exclu également que des déformations inélastiques cycliques puissent se
produire dans d’autres éléments, par exemple les assemblages [8].
Toutefois, bien que la réputation des portiques en acier ne soit plus à faire, la vulnérabilité des
portiques non contreventés est apparue assez récemment lors des puissants tremblements de
terre de Northridge 1994 et Kobe 1995, par des ruines fragiles décelées au niveau des
assemblages entre les poutres et les poteaux des structures en particulier les assemblages
soudés [2].
4-3 Exigences de l’Eurocode 8 pour les assemblages semi-rigides et résistance partielle
L’Eurocode 8 exige dans le cas d’utilisation d’assemblages dissipatifs semi-rigides que
l’effet réel de la rigidité élastique des assemblages sur la déformabilité globale soit étudié par
une analyse globale appropriée (statique non-linéaire, de type « push-over », ou dynamique
non-linéaire) (clause 6.6.4 (2)) [15].
Conformément à la clause 6.5.2(4) de Eurocode 8-1 [15], les assemblages des zones
dissipatives doivent posséder une sur-résistance suffisante afin de permettre la plastification
des éléments attachés lorsque les zones dissipatives sont situées dans les éléments structuraux.
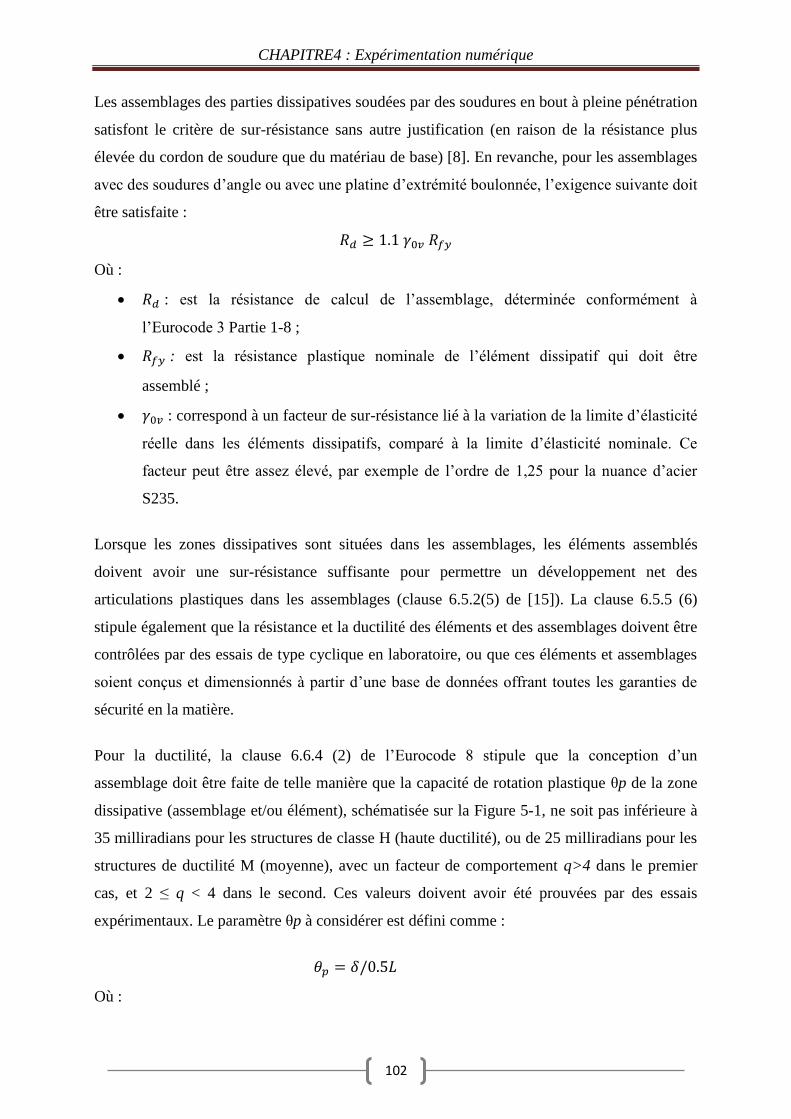
CHAPITRE4 : Expérimentation numérique
102
Les assemblages des parties dissipatives soudées par des soudures en bout à pleine pénétration
satisfont le critère de sur-résistance sans autre justification (en raison de la résistance plus
élevée du cordon de soudure que du matériau de base) [8]. En revanche, pour les assemblages
avec des soudures d’angle ou avec une platine d’extrémité boulonnée, l’exigence suivante doit
être satisfaite :
Où :
: est la résistance de calcul de l’assemblage, déterminée conformément à
l’Eurocode 3 Partie 1-8 ;
: est la résistance plastique nominale de l’élément dissipatif qui doit être
assemblé ;
: correspond à un facteur de sur-résistance lié à la variation de la limite d’élasticité
réelle dans les éléments dissipatifs, comparé à la limite d’élasticité nominale. Ce
facteur peut être assez élevé, par exemple de l’ordre de 1,25 pour la nuance d’acier
S235.
Lorsque les zones dissipatives sont situées dans les assemblages, les éléments assemblés
doivent avoir une sur-résistance suffisante pour permettre un développement net des
articulations plastiques dans les assemblages (clause 6.5.2(5) de [15]). La clause 6.5.5 (6)
stipule également que la résistance et la ductilité des éléments et des assemblages doivent être
contrôlées par des essais de type cyclique en laboratoire, ou que ces éléments et assemblages
soient conçus et dimensionnés à partir d’une base de données offrant toutes les garanties de
sécurité en la matière.
Pour la ductilité, la clause 6.6.4 (2) de l’Eurocode 8 stipule que la conception d’un
assemblage doit être faite de telle manière que la capacité de rotation plastique θp de la zone
dissipative (assemblage et/ou élément), schématisée sur la Figure 5-1, ne soit pas inférieure à
35 milliradians pour les structures de classe H (haute ductilité), ou de 25 milliradians pour les
structures de ductilité M (moyenne), avec un facteur de comportement q>4 dans le premier
cas, et 2 ≤ q < 4 dans le second. Ces valeurs doivent avoir été prouvées par des essais
expérimentaux. Le paramètre θp à considérer est défini comme :
Où :
CHAPITRE4 : Expérimentation numérique
103
δ : flèche de la poutre au milieu de la travée
L : portée de la poutre.
Figure 4-1 : Définition de la rotation plastique θp selon l’Eurocode 8
4-4 Présentation de la structure étudiée :
La structure envisagée dans notre étude est une structure bidimensionnelle (portique plan) à
deux travées et six étages. Les dimensions et les caractéristiques des poutres et des poteaux
adoptés sont représentés dans la figure 4-2 et le tableau4-1 :
Figure 4-2 Dimension géométrique du portique étudié
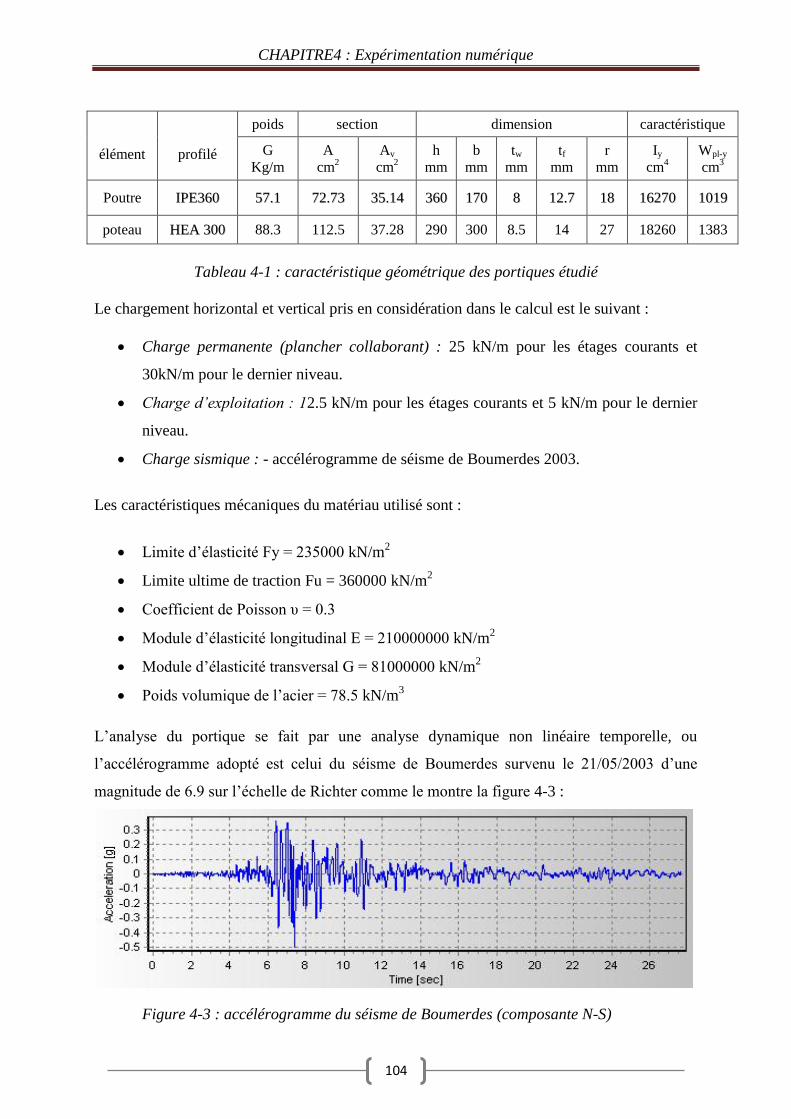
CHAPITRE4 : Expérimentation numérique
104
élément
profilé
poids section dimension caractéristique
G
Kg/m
A
cm2
Av
cm2
h
mm
b
mm
tw
mm
tf
mm
r
mm
Iy
cm4
Wpl-y
cm3
Poutre IIPPEE336600 5577..11 7722..7733 3355..1144 336600 117700 88 1122..77 1188 1166227700 11001199
poteau HHEEAA 330000 88.3 112.5 37.28 290 300 8.5 14 27 18260 1383
Tableau 4-1 : caractéristique géométrique des portiques étudié
Le chargement horizontal et vertical pris en considération dans le calcul est le suivant :
Charge permanente (plancher collaborant) : 25 kN/m pour les étages courants et
30kN/m pour le dernier niveau.
Charge d’exploitation : 12.5 kN/m pour les étages courants et 5 kN/m pour le dernier
niveau.
Charge sismique : - accélérogramme de séisme de Boumerdes 2003.
Les caractéristiques mécaniques du matériau utilisé sont :
Limite d’élasticité Fy = 235000 kN/m2
Limite ultime de traction Fu = 360000 kN/m2
Coefficient de Poisson υ = 0.3
Module d’élasticité longitudinal E = 210000000 kN/m2
Module d’élasticité transversal G = 81000000 kN/m2
Poids volumique de l’acier = 78.5 kN/m3
L’analyse du portique se fait par une analyse dynamique non linéaire temporelle, ou
l’accélérogramme adopté est celui du séisme de Boumerdes survenu le 21/05/2003 d’une
magnitude de 6.9 sur l’échelle de Richter comme le montre la figure 4-3 :
Figure 4-3 : accélérogramme du séisme de Boumerdes (composante N-S)

CHAPITRE4 : Expérimentation numérique
105
Cette analyse permet d’obtenir la réponse dynamique à chaque incrément de temps et fournit
les demandes de ductilité et les déformations maximales développées par la structure. Les
calculs se font ainsi pas à pas jusqu’à ce qu’un déplacement maximal est atteint ou jusqu’à ce
l’instabilité totale de la structure est atteinte. Le pas de temps est utilisé pour pouvoir
contrôler l’incrément de l’accélération du sol γ, qui contrôle à son tour l’incrément des forces
appliquées.
L’application de la méthode dynamique non linéaire temporelle nous a permis aussi de suivre
le comportement de la structure au-delà du domaine élastique et cela en suivant l’histoire de
formation des rotules plastiques dés son apparition dans n’importe quel élément structurel.
4-5 Rotules plastiques dans les poutres et les poteaux :
Pour le SAP2000, le comportement non linéaire des poutres et des poteaux est représenté par
l'attribution concentrée des rotules plastiques aux extrémités des éléments là où on assume
que le rendement par flexion se produit. La norme FEMA 356 [16] propose les équations
suivantes pour calculer le moment et la rotation de l’écoulement pour les poutres et les
poteaux en acier :
My = Fye.Wpl
Où :
Fye = 1.1 Fy
Fy: Limite élasticité de l'acier
Wpl: Module plastique de la section
L: longueur d’élément
E: module d'élasticité
I: Moment d'inertie par rapport à l'axe de flexion
FEMA 356 [16] fournit un ordre de grandeur pour la rotation de ruine pour les poteaux et les
poutres défini par une loi de comportement et représenté sur la figure 4-4:
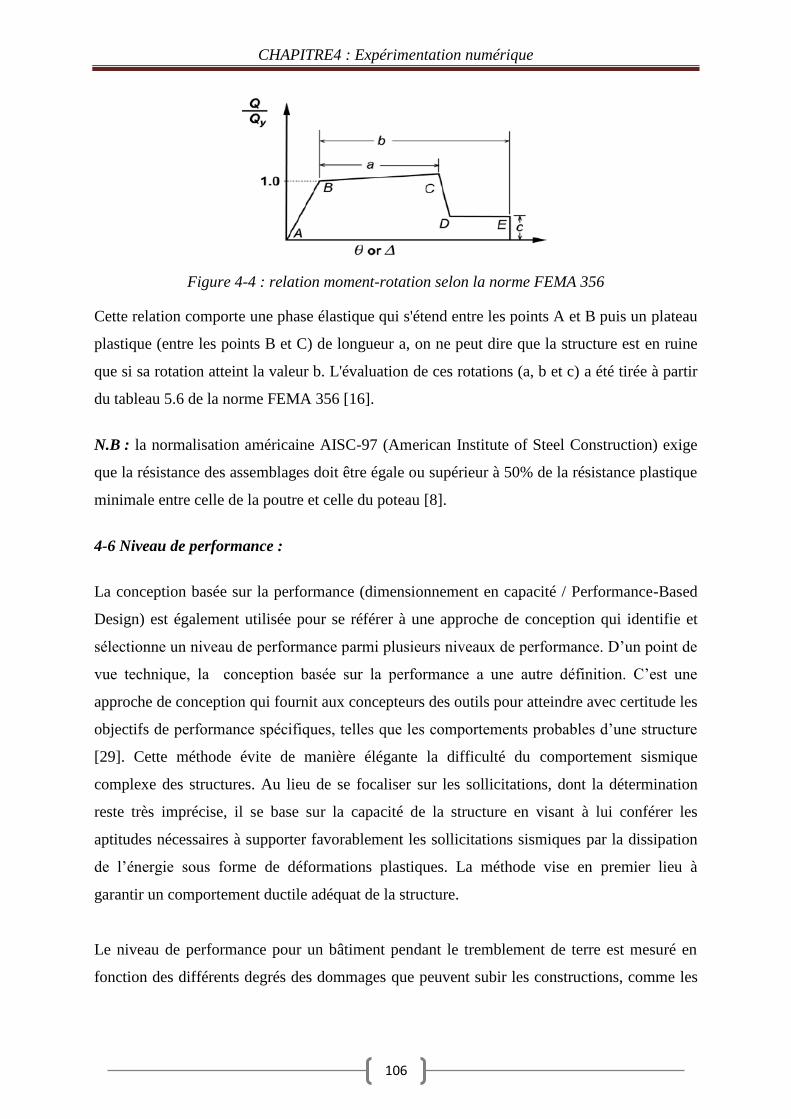
CHAPITRE4 : Expérimentation numérique
106
Figure 4-4 : relation moment-rotation selon la norme FEMA 356
Cette relation comporte une phase élastique qui s'étend entre les points A et B puis un plateau
plastique (entre les points B et C) de longueur a, on ne peut dire que la structure est en ruine
que si sa rotation atteint la valeur b. L'évaluation de ces rotations (a, b et c) a été tirée à partir
du tableau 5.6 de la norme FEMA 356 [16].
N.B : la normalisation américaine AISC-97 (American Institute of Steel Construction) exige
que la résistance des assemblages doit être égale ou supérieur à 50% de la résistance plastique
minimale entre celle de la poutre et celle du poteau [8].
4-6 Niveau de performance :
La conception basée sur la performance (dimensionnement en capacité / Performance-Based
Design) est également utilisée pour se référer à une approche de conception qui identifie et
sélectionne un niveau de performance parmi plusieurs niveaux de performance. D’un point de
vue technique, la conception basée sur la performance a une autre définition. C’est une
approche de conception qui fournit aux concepteurs des outils pour atteindre avec certitude les
objectifs de performance spécifiques, telles que les comportements probables d’une structure
[29]. Cette méthode évite de manière élégante la difficulté du comportement sismique
complexe des structures. Au lieu de se focaliser sur les sollicitations, dont la détermination
reste très imprécise, il se base sur la capacité de la structure en visant à lui conférer les
aptitudes nécessaires à supporter favorablement les sollicitations sismiques par la dissipation
de l’énergie sous forme de déformations plastiques. La méthode vise en premier lieu à
garantir un comportement ductile adéquat de la structure.
Le niveau de performance pour un bâtiment pendant le tremblement de terre est mesuré en
fonction des différents degrés des dommages que peuvent subir les constructions, comme les
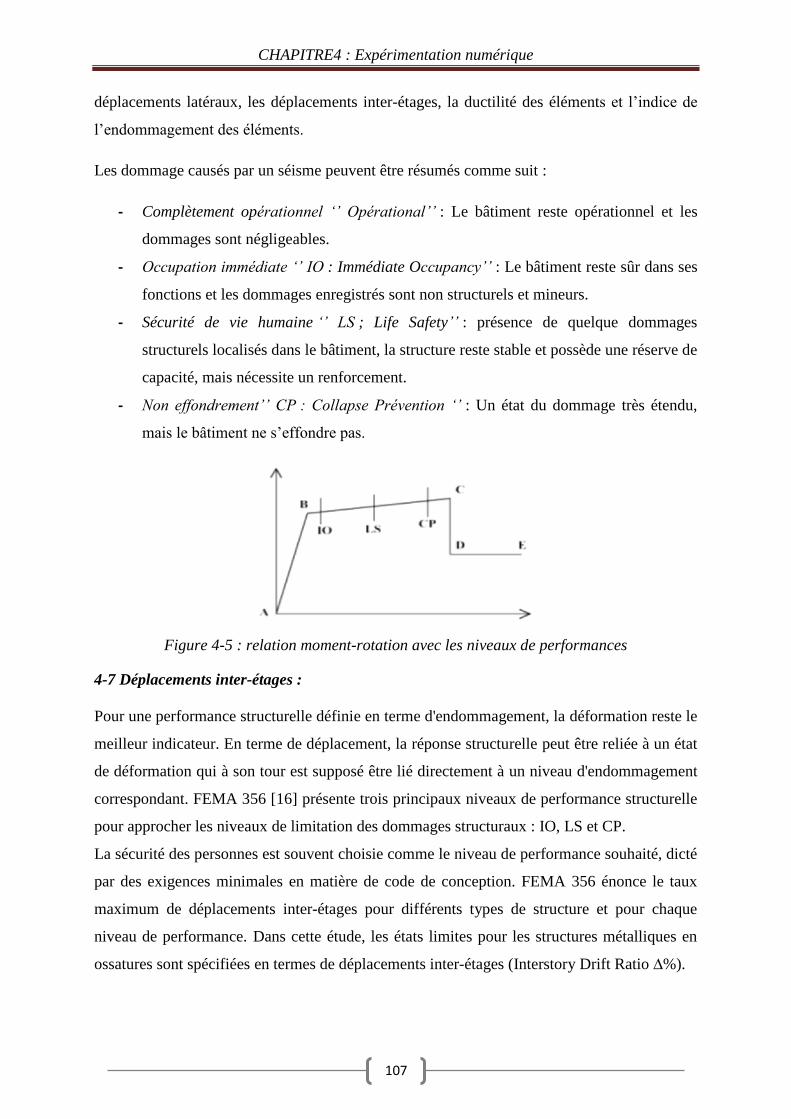
CHAPITRE4 : Expérimentation numérique
107
déplacements latéraux, les déplacements inter-étages, la ductilité des éléments et l’indice de
l’endommagement des éléments.
Les dommage causés par un séisme peuvent être résumés comme suit :
- Complètement opérationnel ‘’ Opérational’’ : Le bâtiment reste opérationnel et les
dommages sont négligeables.
- Occupation immédiate ‘’ IO : Immédiate Occupancy’’ : Le bâtiment reste sûr dans ses
fonctions et les dommages enregistrés sont non structurels et mineurs.
- Sécurité de vie humaine ‘’ LS ; Life Safety’’ : présence de quelque dommages
structurels localisés dans le bâtiment, la structure reste stable et possède une réserve de
capacité, mais nécessite un renforcement.
- Non effondrement’’ CP : Collapse Prévention ‘’ : Un état du dommage très étendu,
mais le bâtiment ne s’effondre pas.
Figure 4-5 : relation moment-rotation avec les niveaux de performances
4-7 Déplacements inter-étages :
Pour une performance structurelle définie en terme d'endommagement, la déformation reste le
meilleur indicateur. En terme de déplacement, la réponse structurelle peut être reliée à un état
de déformation qui à son tour est supposé être lié directement à un niveau d'endommagement
correspondant. FEMA 356 [16] présente trois principaux niveaux de performance structurelle
pour approcher les niveaux de limitation des dommages structuraux : IO, LS et CP.
La sécurité des personnes est souvent choisie comme le niveau de performance souhaité, dicté
par des exigences minimales en matière de code de conception. FEMA 356 énonce le taux
maximum de déplacements inter-étages pour différents types de structure et pour chaque
niveau de performance. Dans cette étude, les états limites pour les structures métalliques en
ossatures sont spécifiées en termes de déplacements inter-étages (Interstory Drift Ratio ∆%).
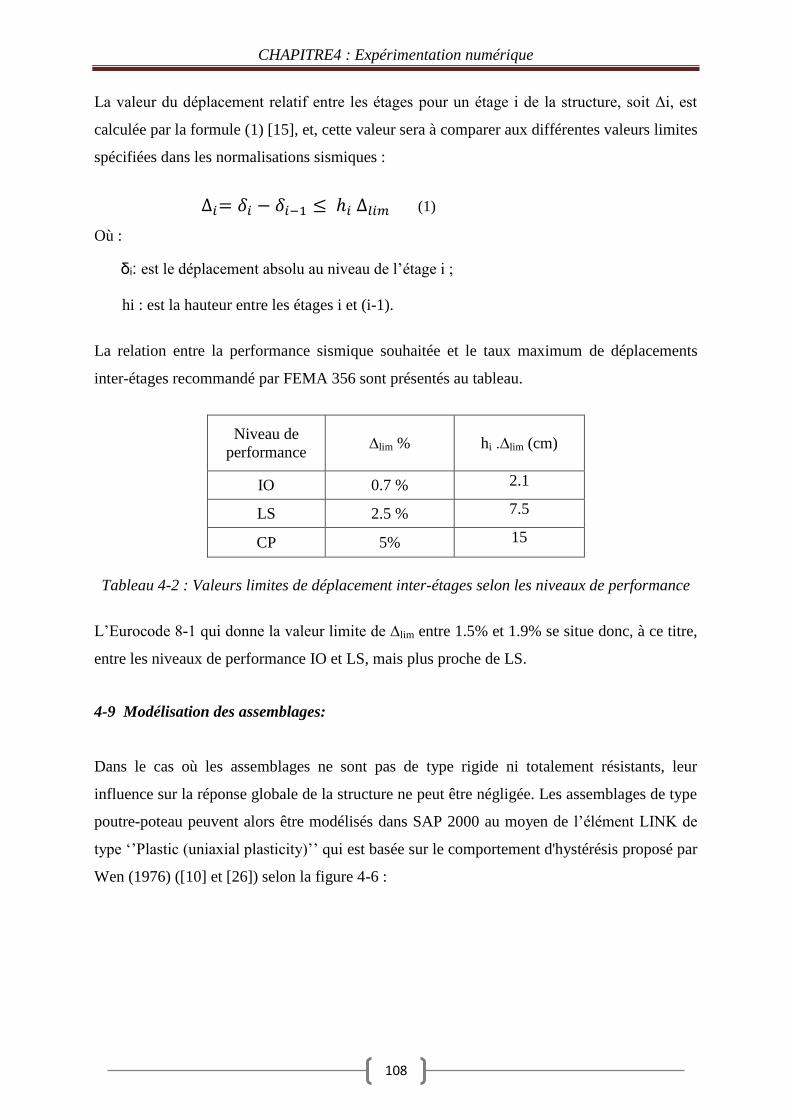
CHAPITRE4 : Expérimentation numérique
108
La valeur du déplacement relatif entre les étages pour un étage i de la structure, soit Δi, est
calculée par la formule (1) [15], et, cette valeur sera à comparer aux différentes valeurs limites
spécifiées dans les normalisations sismiques :
(1)
Où :
δi: est le déplacement absolu au niveau de l’étage i ;
hi : est la hauteur entre les étages i et (i-1).
La relation entre la performance sismique souhaitée et le taux maximum de déplacements
inter-étages recommandé par FEMA 356 sont présentés au tableau.
Niveau de
performance ∆lim % hi .∆lim (cm)
IO 0.7 % 2.1
LS 2.5 % 7.5
CP 5% 15
Tableau 4-2 : Valeurs limites de déplacement inter-étages selon les niveaux de performance
L’Eurocode 8-1 qui donne la valeur limite de ∆lim entre 1.5% et 1.9% se situe donc, à ce titre,
entre les niveaux de performance IO et LS, mais plus proche de LS.
4-9 Modélisation des assemblages:
Dans le cas où les assemblages ne sont pas de type rigide ni totalement résistants, leur
influence sur la réponse globale de la structure ne peut être négligée. Les assemblages de type
poutre-poteau peuvent alors être modélisés dans SAP 2000 au moyen de l’élément LINK de
type ‘’Plastic (uniaxial plasticity)’’ qui est basée sur le comportement d'hystérésis proposé par
Wen (1976) ([10] et [26]) selon la figure 4-6 :
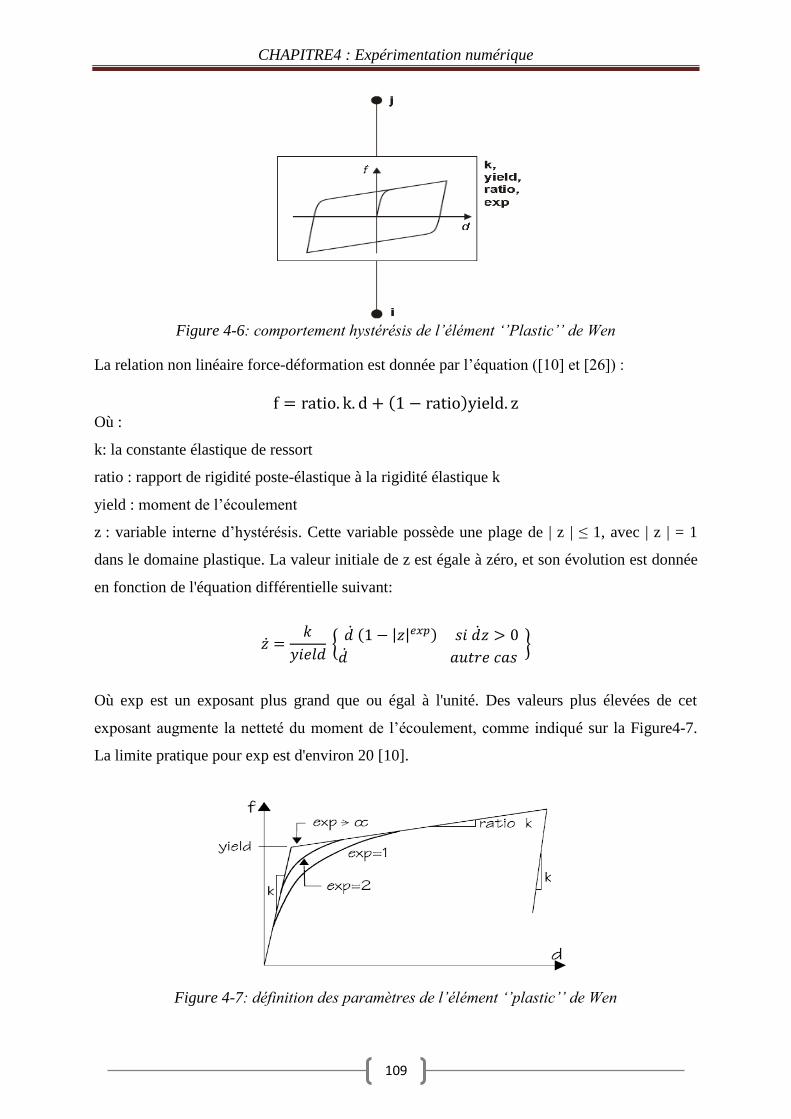
CHAPITRE4 : Expérimentation numérique
109
Figure 4-6: comportement hystérésis de l’élément ‘’Plastic’’ de Wen
La relation non linéaire force-déformation est donnée par l’équation ([10] et [26]) :
Où :
k: la constante élastique de ressort
ratio : rapport de rigidité poste-élastique à la rigidité élastique k
yield : moment de l’écoulement
z : variable interne d’hystérésis. Cette variable possède une plage de | z | ≤ 1, avec | z | = 1
dans le domaine plastique. La valeur initiale de z est égale à zéro, et son évolution est donnée
en fonction de l'équation différentielle suivant:
Où exp est un exposant plus grand que ou égal à l'unité. Des valeurs plus élevées de cet
exposant augmente la netteté du moment de l’écoulement, comme indiqué sur la Figure4-7.
La limite pratique pour exp est d'environ 20 [10].
Figure 4-7: définition des paramètres de l’élément ‘’plastic’’ de Wen

CHAPITRE4 : Expérimentation numérique
110
4-10 Facteur de fixation :
Dans le cas d’un nœud classique, la rigidité est supposée égale à l’infini. L’angle entre la
poutre et les poteaux reste à 90° (Figure1-27 (a) à gauche). Dans le cas où la connexion n’est
plus rigide, une rotation φ s’ajoute dans la rotation du nœud (Figure1-27(a) à droite). La
structure peut être modélisée avec des nœuds semi-rigides (Figure1-27 (b)) de rigidité S, avec
S=Mj/ φ.
Figure 4-8 : (a) nœuds rigides (à gauche) et semi-rigides (à droite); (b) modélisation des
nœuds semi-rigides
Un coefficient de fixation r est utilisé, qui a des valeurs entre 0 et 1 ; 0 pour des rotules
parfaites et 1 pour des assemblages rigides. Chen propose une relation entre r et S ([4], [7] et
[21]) qui égale :
Le moment fléchissant en fonction de la rotation due à la semi-rigidité est donné par la
formule suivante :
Avec :
représente la rotation due à un chargement uniformément répartie sur une
poutre simplement appuyée.
A partir les équations précédentes et les équations données dans le chapitre 1 (partie 1-13), on
peut exprimer la rigidité en rotation S, le paramètre α, la rotation φ et le moment fléchissant
M en fonction du facteur de fixation r par les formules suivantes :
M,φ M,φ
S S
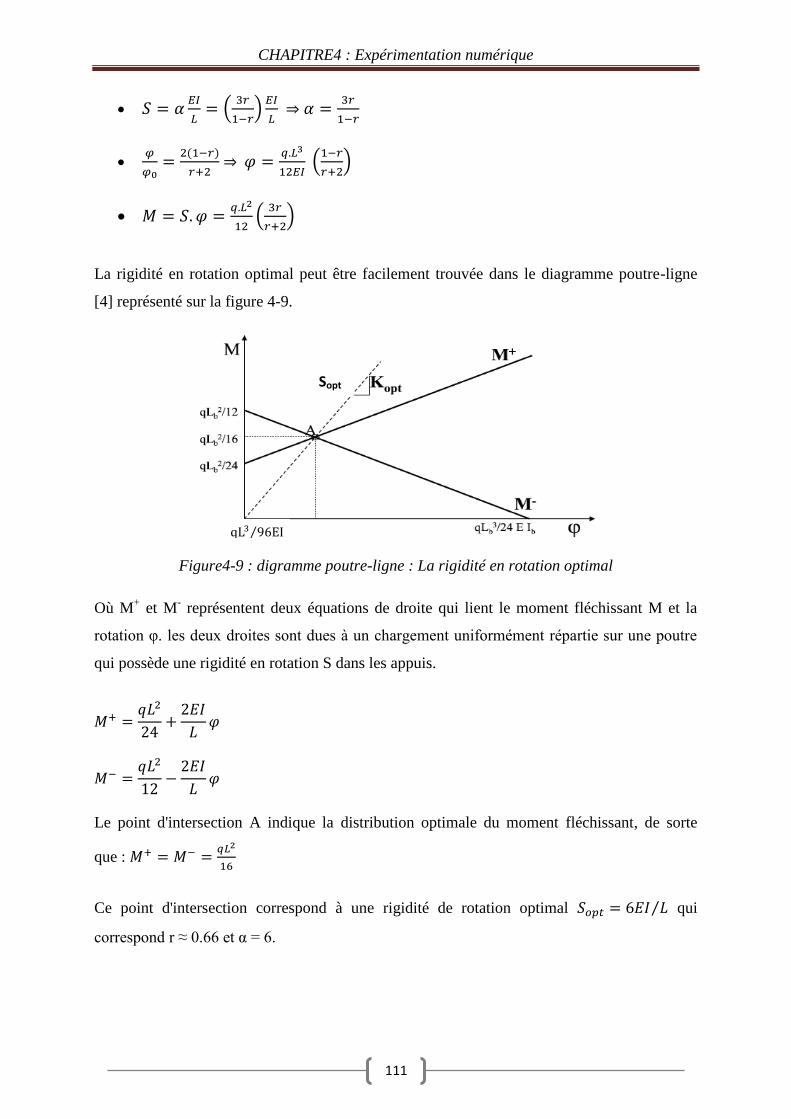
CHAPITRE4 : Expérimentation numérique
111
⇒
⇒
La rigidité en rotation optimal peut être facilement trouvée dans le diagramme poutre-ligne
[4] représenté sur la figure 4-9.
Figure4-9 : digramme poutre-ligne : La rigidité en rotation optimal
Où M+ et M
- représentent deux équations de droite qui lient le moment fléchissant M et la
rotation φ. les deux droites sont dues à un chargement uniformément répartie sur une poutre
qui possède une rigidité en rotation S dans les appuis.
Le point d'intersection A indique la distribution optimale du moment fléchissant, de sorte
que :
Ce point d'intersection correspond à une rigidité de rotation optimal qui
correspond r ≈ 0.66 et α = 6.
Sopt
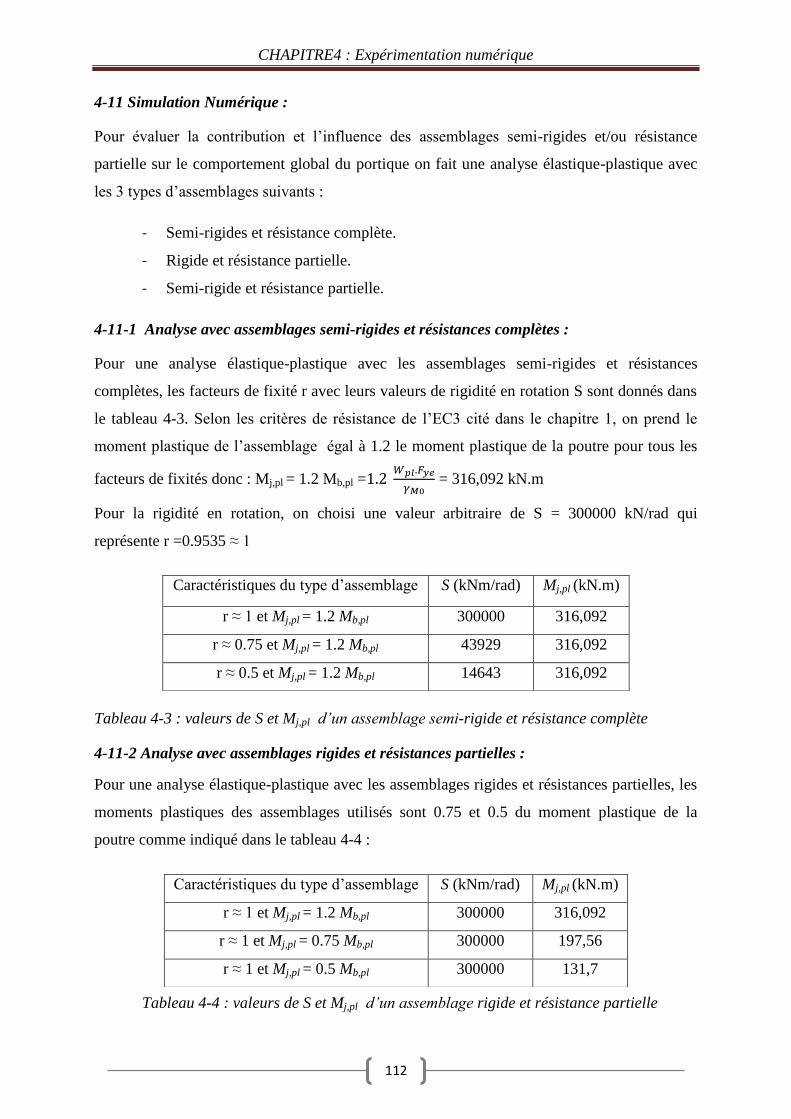
CHAPITRE4 : Expérimentation numérique
112
4-11 Simulation Numérique :
Pour évaluer la contribution et l’influence des assemblages semi-rigides et/ou résistance
partielle sur le comportement global du portique on fait une analyse élastique-plastique avec
les 3 types d’assemblages suivants :
- Semi-rigides et résistance complète.
- Rigide et résistance partielle.
- Semi-rigide et résistance partielle.
4-11-1 Analyse avec assemblages semi-rigides et résistances complètes :
Pour une analyse élastique-plastique avec les assemblages semi-rigides et résistances
complètes, les facteurs de fixité r avec leurs valeurs de rigidité en rotation S sont donnés dans
le tableau 4-3. Selon les critères de résistance de l’EC3 cité dans le chapitre 1, on prend le
moment plastique de l’assemblage égal à 1.2 le moment plastique de la poutre pour tous les
facteurs de fixités donc : Mj,pl = 1.2 Mb,pl =
= 316,092 kN.m
Pour la rigidité en rotation, on choisi une valeur arbitraire de S = 300000 kN/rad qui
représente r =0.9535 ≈ 1
Tableau 4-3 : valeurs de S et Mj,pl d’un assemblage semi-rigide et résistance complète
4-11-2 Analyse avec assemblages rigides et résistances partielles :
Pour une analyse élastique-plastique avec les assemblages rigides et résistances partielles, les
moments plastiques des assemblages utilisés sont 0.75 et 0.5 du moment plastique de la
poutre comme indiqué dans le tableau 4-4 :
Tableau 4-4 : valeurs de S et Mj,pl d’un assemblage rigide et résistance partielle
Caractéristiques du type d’assemblage S (kNm/rad) Mj,pl (kN.m)
r ≈ 1 et Mj,pl = 1.2 Mb,pl 300000 316,092
r ≈ 0.75 et Mj,pl = 1.2 Mb,pl 43929 316,092
r ≈ 0.5 et Mj,pl = 1.2 Mb,pl 14643 316,092
Caractéristiques du type d’assemblage S (kNm/rad) Mj,pl (kN.m)
r ≈ 1 et Mj,pl = 1.2 Mb,pl 300000 316,092
r ≈ 1 et Mj,pl = 0.75 Mb,pl 300000 197,56
r ≈ 1 et Mj,pl = 0.5 Mb,pl 300000 131,7
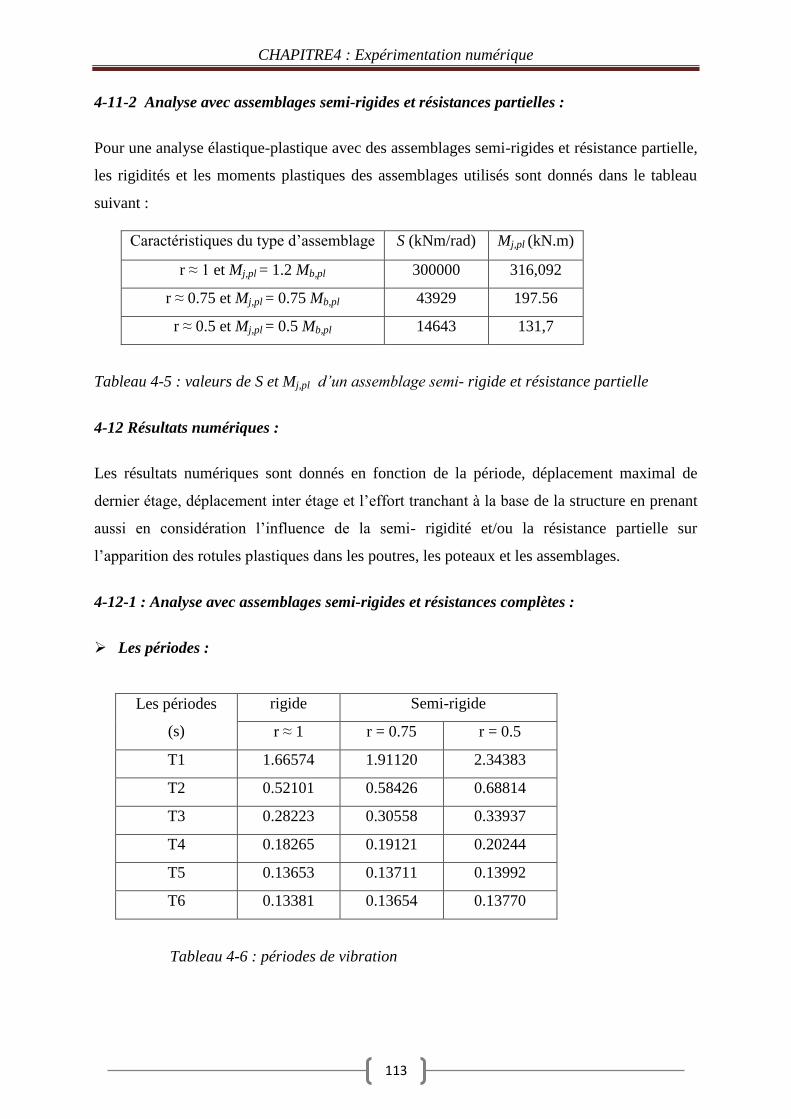
CHAPITRE4 : Expérimentation numérique
113
4-11-2 Analyse avec assemblages semi-rigides et résistances partielles :
Pour une analyse élastique-plastique avec des assemblages semi-rigides et résistance partielle,
les rigidités et les moments plastiques des assemblages utilisés sont donnés dans le tableau
suivant :
Tableau 4-5 : valeurs de S et Mj,pl d’un assemblage semi- rigide et résistance partielle
4-12 Résultats numériques :
Les résultats numériques sont donnés en fonction de la période, déplacement maximal de
dernier étage, déplacement inter étage et l’effort tranchant à la base de la structure en prenant
aussi en considération l’influence de la semi- rigidité et/ou la résistance partielle sur
l’apparition des rotules plastiques dans les poutres, les poteaux et les assemblages.
4-12-1 : Analyse avec assemblages semi-rigides et résistances complètes :
Les périodes :
Les périodes
(s)
rigide Semi-rigide
r ≈ 1 r = 0.75 r = 0.5
T1 1.66574 1.91120 2.34383
T2 0.52101 0.58426 0.68814
T3 0.28223 0.30558 0.33937
T4 0.18265 0.19121 0.20244
T5 0.13653 0.13711 0.13992
T6 0.13381 0.13654 0.13770
Tableau 4-6 : périodes de vibration
Caractéristiques du type d’assemblage S (kNm/rad) Mj,pl (kN.m)
r ≈ 1 et Mj,pl = 1.2 Mb,pl 300000 316,092
r ≈ 0.75 et Mj,pl = 0.75 Mb,pl 43929 197.56
r ≈ 0.5 et Mj,pl = 0.5 Mb,pl 14643 131,7
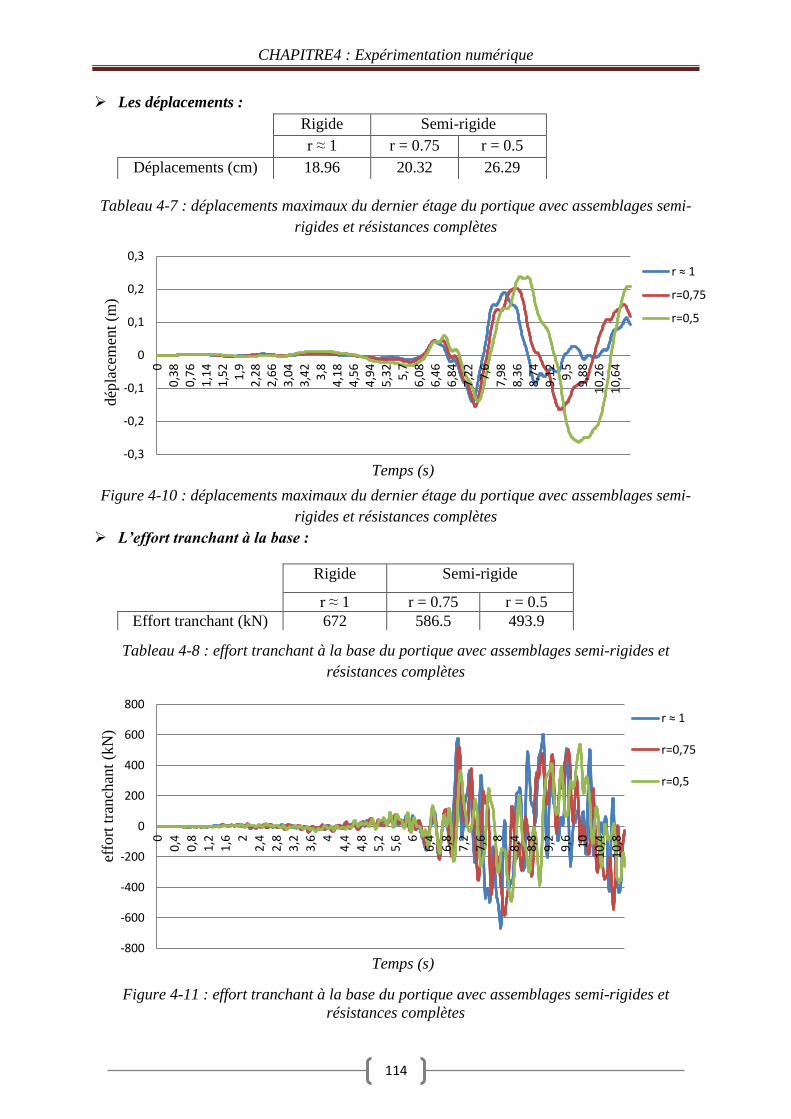
CHAPITRE4 : Expérimentation numérique
114
Les déplacements :
Tableau 4-7 : déplacements maximaux du dernier étage du portique avec assemblages semi-
rigides et résistances complètes
Figure 4-10 : déplacements maximaux du dernier étage du portique avec assemblages semi-
rigides et résistances complètes
L’effort tranchant à la base :
Tableau 4-8 : effort tranchant à la base du portique avec assemblages semi-rigides et
résistances complètes
Figure 4-11 : effort tranchant à la base du portique avec assemblages semi-rigides et
résistances complètes
-0,3
-0,2
-0,1
0
0,1
0,2
0,3
0
0,3
8
0,7
6
1,1
4
1,5
2
1,9
2
,28
2
,66
3
,04
3
,42
3
,8
4,1
8
4,5
6
4,9
4
5,3
2
5,7
6
,08
6
,46
6
,84
7
,22
7
,6
7,9
8
8,3
6
8,7
4
9,1
2
9,5
9
,88
1
0,2
6 1
0,6
4
dép
lace
men
t (m
)
r ≈ 1
r=0,75
r=0,5
-800
-600
-400
-200
0
200
400
600
800
0
0,4
0,8
1,2
1,6
2
2,4
2,8
3,2
3,6
4
4,4
4,8
5,2
5,6
6
6,4
6,8
7,2
7,6
8
8,4
8,8
9,2
9,6
10
10
,4
10
,8
effo
rt t
ranch
ant
(kN
)
r ≈ 1
r=0,75
r=0,5
Rigide Semi-rigide
r ≈ 1 r = 0.75 r = 0.5
Déplacements (cm) 18.96 20.32 26.29
Rigide Semi-rigide
r ≈ 1 r = 0.75 r = 0.5
Effort tranchant (kN) 672 586.5 493.9
Temps (s)
Temps (s)
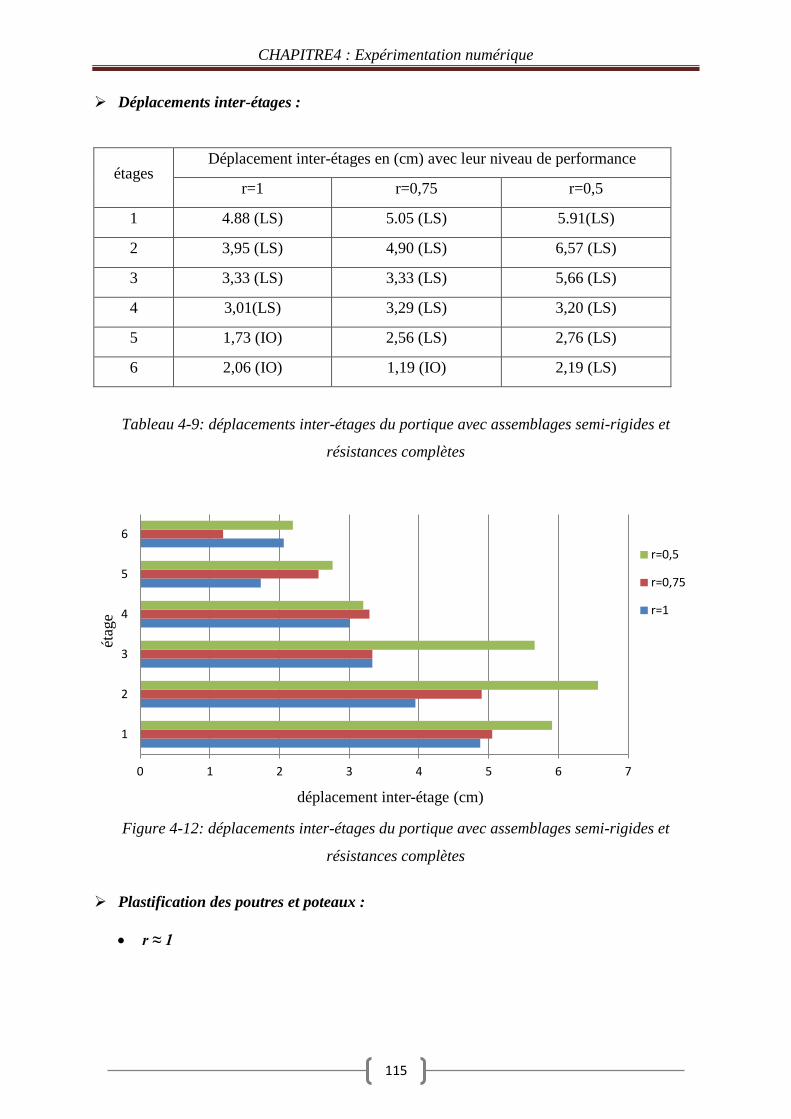
CHAPITRE4 : Expérimentation numérique
115
Déplacements inter-étages :
étages Déplacement inter-étages en (cm) avec leur niveau de performance
r=1 r=0,75 r=0,5
1 4.88 (LS) 5.05 (LS) 5.91(LS)
2 3,95 (LS) 4,90 (LS) 6,57 (LS)
3 3,33 (LS) 3,33 (LS) 5,66 (LS)
4 3,01(LS) 3,29 (LS) 3,20 (LS)
5 1,73 (IO) 2,56 (LS) 2,76 (LS)
6 2,06 (IO) 1,19 (IO) 2,19 (LS)
Tableau 4-9: déplacements inter-étages du portique avec assemblages semi-rigides et
résistances complètes
Figure 4-12: déplacements inter-étages du portique avec assemblages semi-rigides et
résistances complètes
Plastification des poutres et poteaux :
r ≈ 1
0 1 2 3 4 5 6 7
1
2
3
4
5
6
déplacement inter-étage (cm)
étag
e
r=0,5
r=0,75
r=1
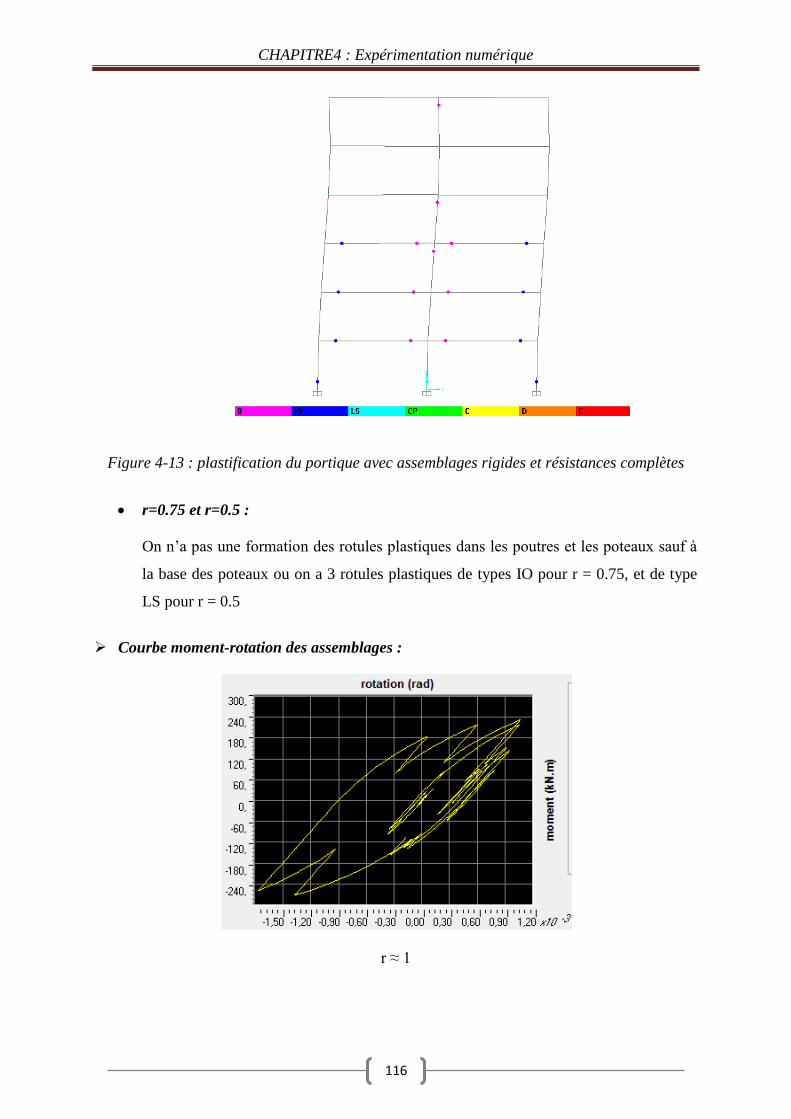
CHAPITRE4 : Expérimentation numérique
116
Figure 4-13 : plastification du portique avec assemblages rigides et résistances complètes
r=0.75 et r=0.5 :
On n’a pas une formation des rotules plastiques dans les poutres et les poteaux sauf à
la base des poteaux ou on a 3 rotules plastiques de types IO pour r = 0.75, et de type
LS pour r = 0.5
Courbe moment-rotation des assemblages :
r ≈ 1
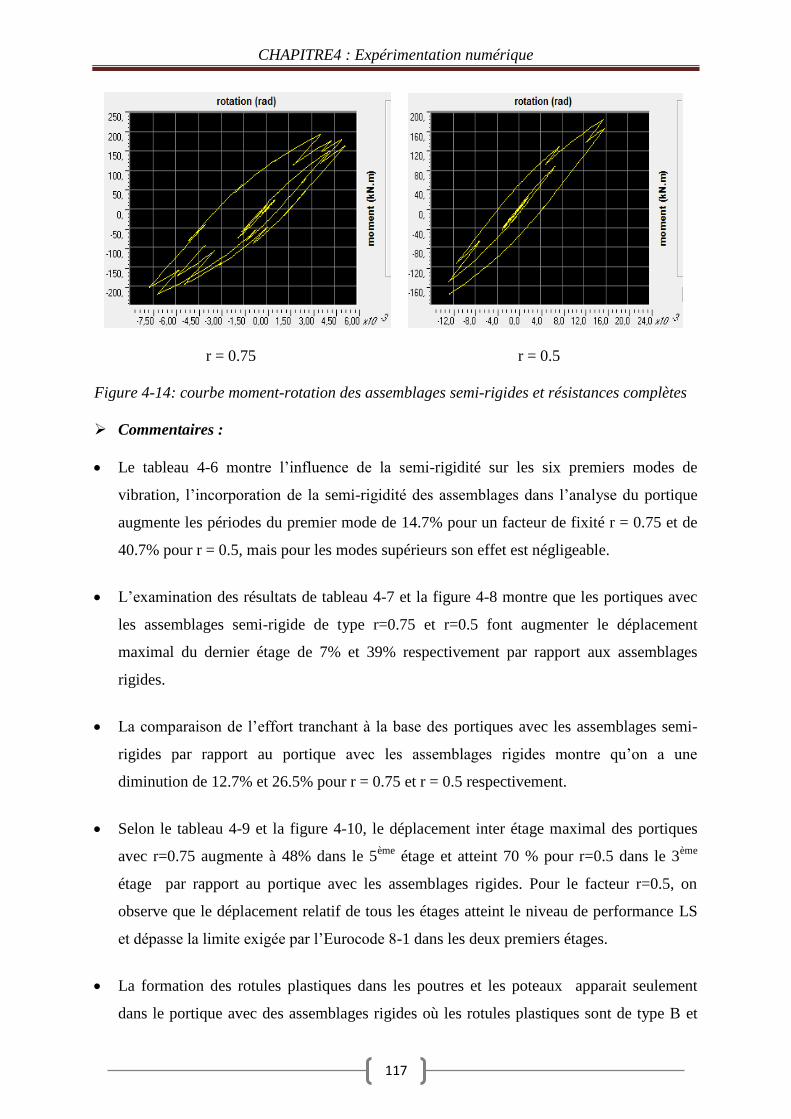
CHAPITRE4 : Expérimentation numérique
117
r = 0.75 r = 0.5
Figure 4-14: courbe moment-rotation des assemblages semi-rigides et résistances complètes
Commentaires :
Le tableau 4-6 montre l’influence de la semi-rigidité sur les six premiers modes de
vibration, l’incorporation de la semi-rigidité des assemblages dans l’analyse du portique
augmente les périodes du premier mode de 14.7% pour un facteur de fixité r = 0.75 et de
40.7% pour r = 0.5, mais pour les modes supérieurs son effet est négligeable.
L’examination des résultats de tableau 4-7 et la figure 4-8 montre que les portiques avec
les assemblages semi-rigide de type r=0.75 et r=0.5 font augmenter le déplacement
maximal du dernier étage de 7% et 39% respectivement par rapport aux assemblages
rigides.
La comparaison de l’effort tranchant à la base des portiques avec les assemblages semi-
rigides par rapport au portique avec les assemblages rigides montre qu’on a une
diminution de 12.7% et 26.5% pour r = 0.75 et r = 0.5 respectivement.
Selon le tableau 4-9 et la figure 4-10, le déplacement inter étage maximal des portiques
avec r=0.75 augmente à 48% dans le 5ème
étage et atteint 70 % pour r=0.5 dans le 3ème
étage par rapport au portique avec les assemblages rigides. Pour le facteur r=0.5, on
observe que le déplacement relatif de tous les étages atteint le niveau de performance LS
et dépasse la limite exigée par l’Eurocode 8-1 dans les deux premiers étages.
La formation des rotules plastiques dans les poutres et les poteaux apparait seulement
dans le portique avec des assemblages rigides où les rotules plastiques sont de type B et
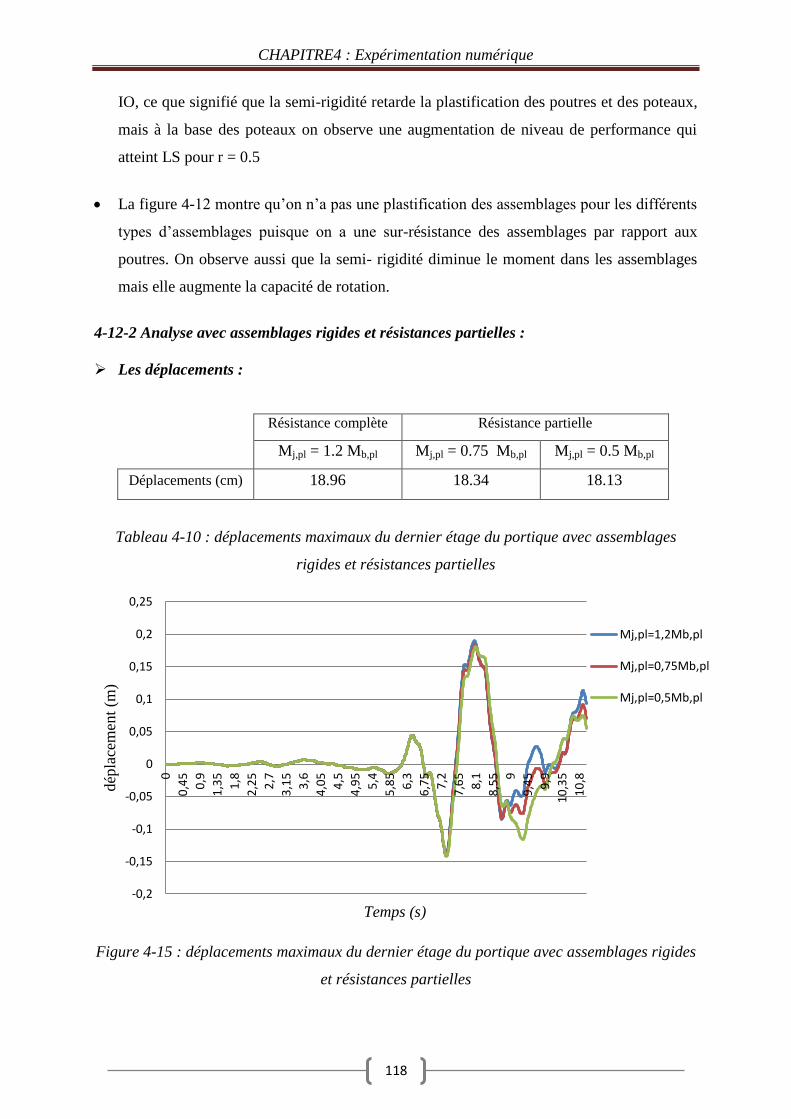
CHAPITRE4 : Expérimentation numérique
118
IO, ce que signifié que la semi-rigidité retarde la plastification des poutres et des poteaux,
mais à la base des poteaux on observe une augmentation de niveau de performance qui
atteint LS pour r = 0.5
La figure 4-12 montre qu’on n’a pas une plastification des assemblages pour les différents
types d’assemblages puisque on a une sur-résistance des assemblages par rapport aux
poutres. On observe aussi que la semi- rigidité diminue le moment dans les assemblages
mais elle augmente la capacité de rotation.
4-12-2 Analyse avec assemblages rigides et résistances partielles :
Les déplacements :
Tableau 4-10 : déplacements maximaux du dernier étage du portique avec assemblages
rigides et résistances partielles
Figure 4-15 : déplacements maximaux du dernier étage du portique avec assemblages rigides
et résistances partielles
-0,2
-0,15
-0,1
-0,05
0
0,05
0,1
0,15
0,2
0,25
0
0,4
5
0,9
1,3
5
1,8
2,2
5
2,7
3,1
5
3,6
4,0
5
4,5
4,9
5
5,4
5,8
5
6,3
6,7
5
7,2
7,6
5
8,1
8,5
5 9
9,4
5
9,9
10
,35
10
,8
dép
lace
men
t (m
)
Mj,pl=1,2Mb,pl
Mj,pl=0,75Mb,pl
Mj,pl=0,5Mb,pl
Résistance complète Résistance partielle
Mj,pl = 1.2 Mb,pl Mj,pl = 0.75 Mb,pl Mj,pl = 0.5 Mb,pl
Déplacements (cm) 18.96 18.34 18.13
Temps (s)
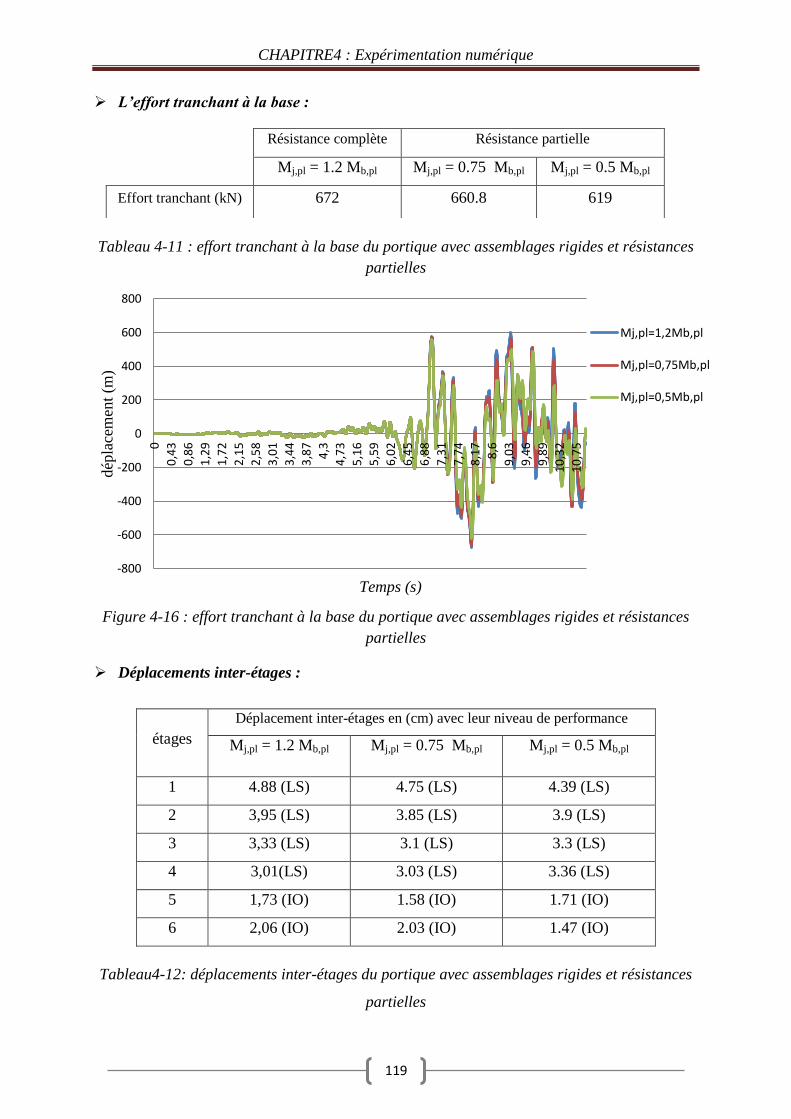
CHAPITRE4 : Expérimentation numérique
119
L’effort tranchant à la base :
Tableau 4-11 : effort tranchant à la base du portique avec assemblages rigides et résistances
partielles
Figure 4-16 : effort tranchant à la base du portique avec assemblages rigides et résistances
partielles
Déplacements inter-étages :
étages
Déplacement inter-étages en (cm) avec leur niveau de performance
Mj,pl = 1.2 Mb,pl Mj,pl = 0.75 Mb,pl Mj,pl = 0.5 Mb,pl
1 4.88 (LS) 4.75 (LS) 4.39 (LS)
2 3,95 (LS) 3.85 (LS) 3.9 (LS)
3 3,33 (LS) 3.1 (LS) 3.3 (LS)
4 3,01(LS) 3.03 (LS) 3.36 (LS)
5 1,73 (IO) 1.58 (IO) 1.71 (IO)
6 2,06 (IO) 2.03 (IO) 1.47 (IO)
Tableau4-12: déplacements inter-étages du portique avec assemblages rigides et résistances
partielles
-800
-600
-400
-200
0
200
400
600
800
0
0,4
3
0,8
6
1,2
9
1,7
2
2,1
5
2,5
8
3,0
1
3,4
4
3,8
7
4,3
4,7
3
5,1
6
5,5
9
6,0
2
6,4
5
6,8
8
7,3
1
7,7
4
8,1
7
8,6
9,0
3
9,4
6
9,8
9
10
,32
10
,75
dép
lace
men
t (m
)
Mj,pl=1,2Mb,pl
Mj,pl=0,75Mb,pl
Mj,pl=0,5Mb,pl
Résistance complète Résistance partielle
Mj,pl = 1.2 Mb,pl Mj,pl = 0.75 Mb,pl Mj,pl = 0.5 Mb,pl
Effort tranchant (kN) 672 660.8 619
Temps (s)
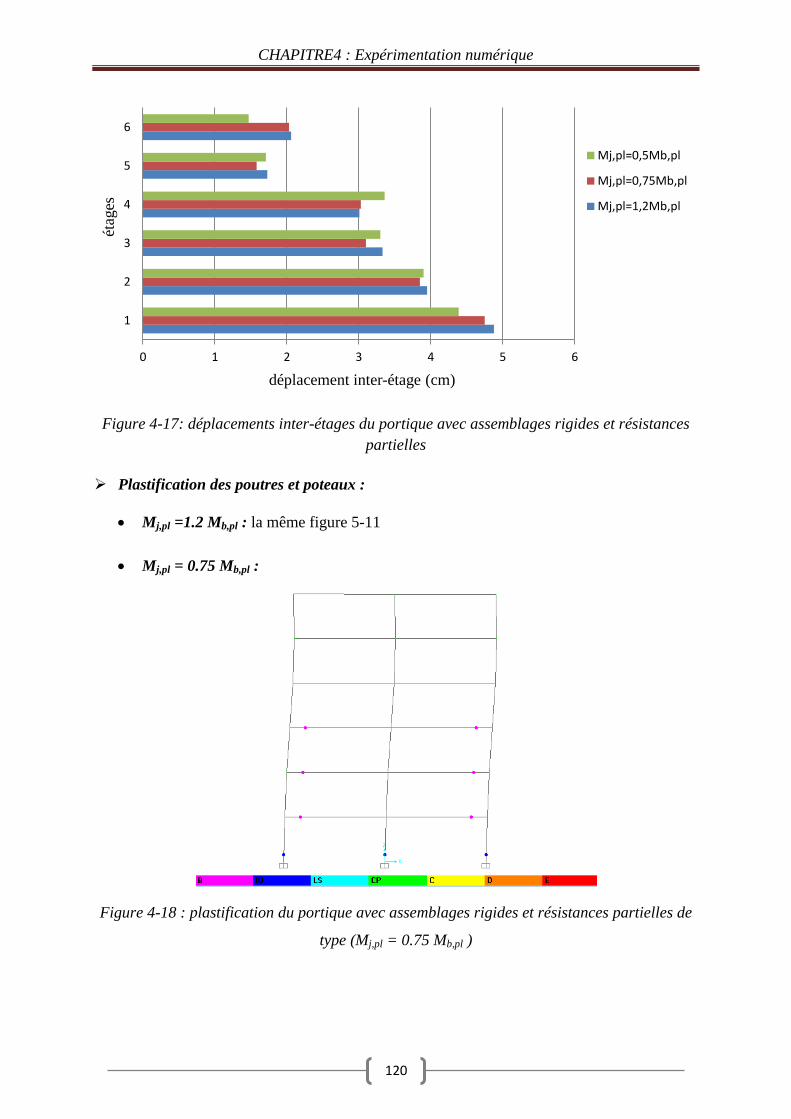
CHAPITRE4 : Expérimentation numérique
120
Figure 4-17: déplacements inter-étages du portique avec assemblages rigides et résistances
partielles
Plastification des poutres et poteaux :
Mj,pl =1.2 Mb,pl : la même figure 5-11
Mj,pl = 0.75 Mb,pl :
Figure 4-18 : plastification du portique avec assemblages rigides et résistances partielles de
type (Mj,pl = 0.75 Mb,pl )
0 1 2 3 4 5 6
1
2
3
4
5
6
déplacement inter-étage (cm)
étag
es
Mj,pl=0,5Mb,pl
Mj,pl=0,75Mb,pl
Mj,pl=1,2Mb,pl
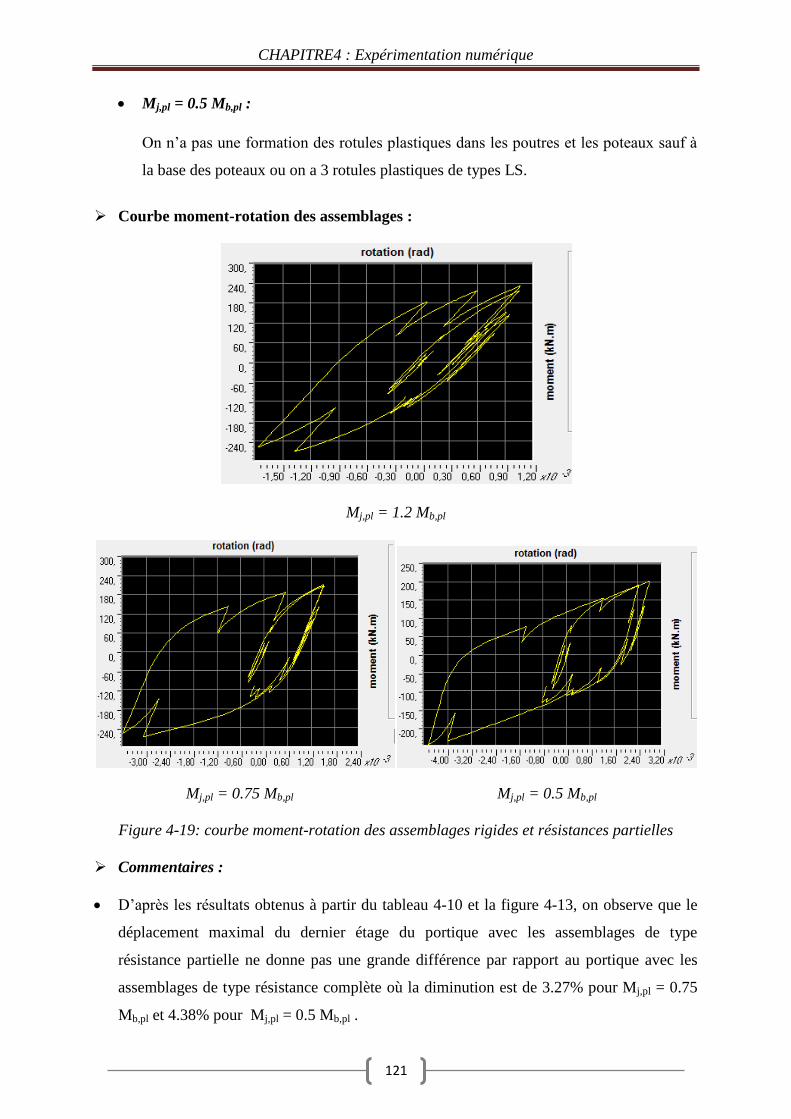
CHAPITRE4 : Expérimentation numérique
121
Mj,pl = 0.5 Mb,pl :
On n’a pas une formation des rotules plastiques dans les poutres et les poteaux sauf à
la base des poteaux ou on a 3 rotules plastiques de types LS.
Courbe moment-rotation des assemblages :
Mj,pl = 1.2 Mb,pl
Mj,pl = 0.75 Mb,pl Mj,pl = 0.5 Mb,pl
Figure 4-19: courbe moment-rotation des assemblages rigides et résistances partielles
Commentaires :
D’après les résultats obtenus à partir du tableau 4-10 et la figure 4-13, on observe que le
déplacement maximal du dernier étage du portique avec les assemblages de type
résistance partielle ne donne pas une grande différence par rapport au portique avec les
assemblages de type résistance complète où la diminution est de 3.27% pour Mj,pl = 0.75
Mb,pl et 4.38% pour Mj,pl = 0.5 Mb,pl .
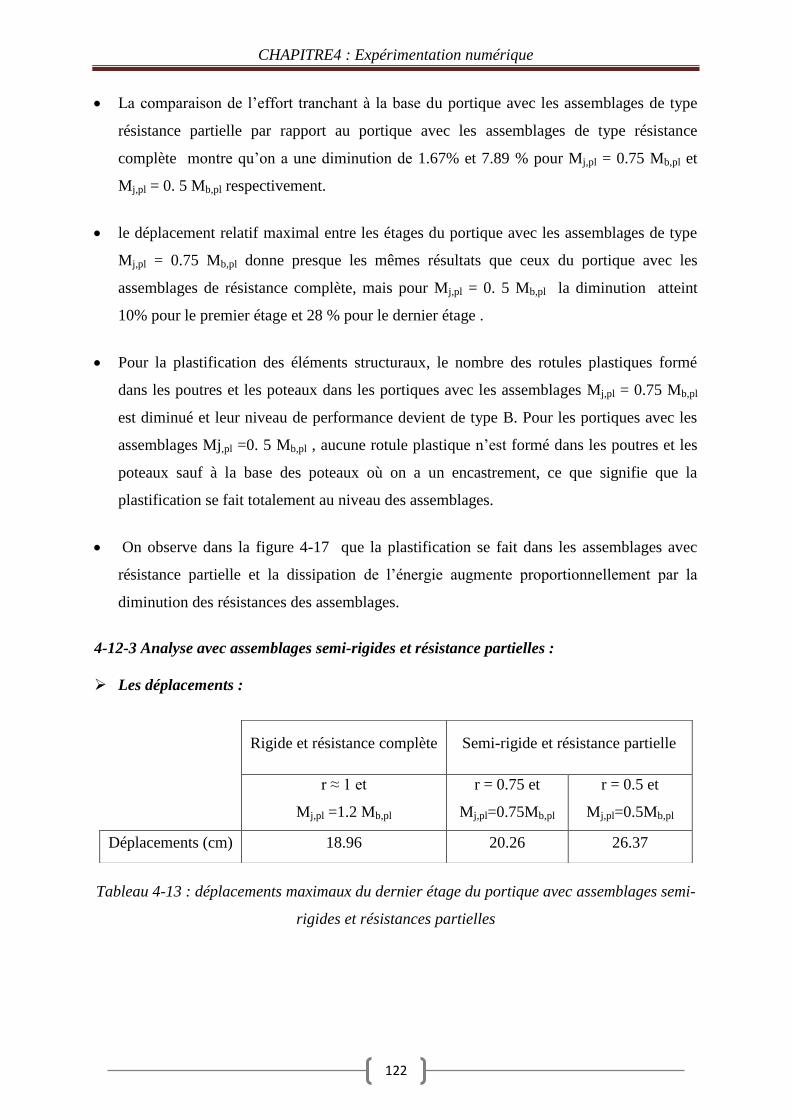
CHAPITRE4 : Expérimentation numérique
122
La comparaison de l’effort tranchant à la base du portique avec les assemblages de type
résistance partielle par rapport au portique avec les assemblages de type résistance
complète montre qu’on a une diminution de 1.67% et 7.89 % pour Mj,pl = 0.75 Mb,pl et
Mj,pl = 0. 5 Mb,pl respectivement.
le déplacement relatif maximal entre les étages du portique avec les assemblages de type
Mj,pl = 0.75 Mb,pl donne presque les mêmes résultats que ceux du portique avec les
assemblages de résistance complète, mais pour Mj,pl = 0. 5 Mb,pl la diminution atteint
10% pour le premier étage et 28 % pour le dernier étage .
Pour la plastification des éléments structuraux, le nombre des rotules plastiques formé
dans les poutres et les poteaux dans les portiques avec les assemblages Mj,pl = 0.75 Mb,pl
est diminué et leur niveau de performance devient de type B. Pour les portiques avec les
assemblages Mj,pl =0. 5 Mb,pl , aucune rotule plastique n’est formé dans les poutres et les
poteaux sauf à la base des poteaux où on a un encastrement, ce que signifie que la
plastification se fait totalement au niveau des assemblages.
On observe dans la figure 4-17 que la plastification se fait dans les assemblages avec
résistance partielle et la dissipation de l’énergie augmente proportionnellement par la
diminution des résistances des assemblages.
4-12-3 Analyse avec assemblages semi-rigides et résistance partielles :
Les déplacements :
Tableau 4-13 : déplacements maximaux du dernier étage du portique avec assemblages semi-
rigides et résistances partielles
Rigide et résistance complète Semi-rigide et résistance partielle
r ≈ 1 et
Mj,pl =1.2 Mb,pl
r = 0.75 et
Mj,pl=0.75Mb,pl
r = 0.5 et
Mj,pl=0.5Mb,pl
Déplacements (cm) 18.96 20.26 26.37
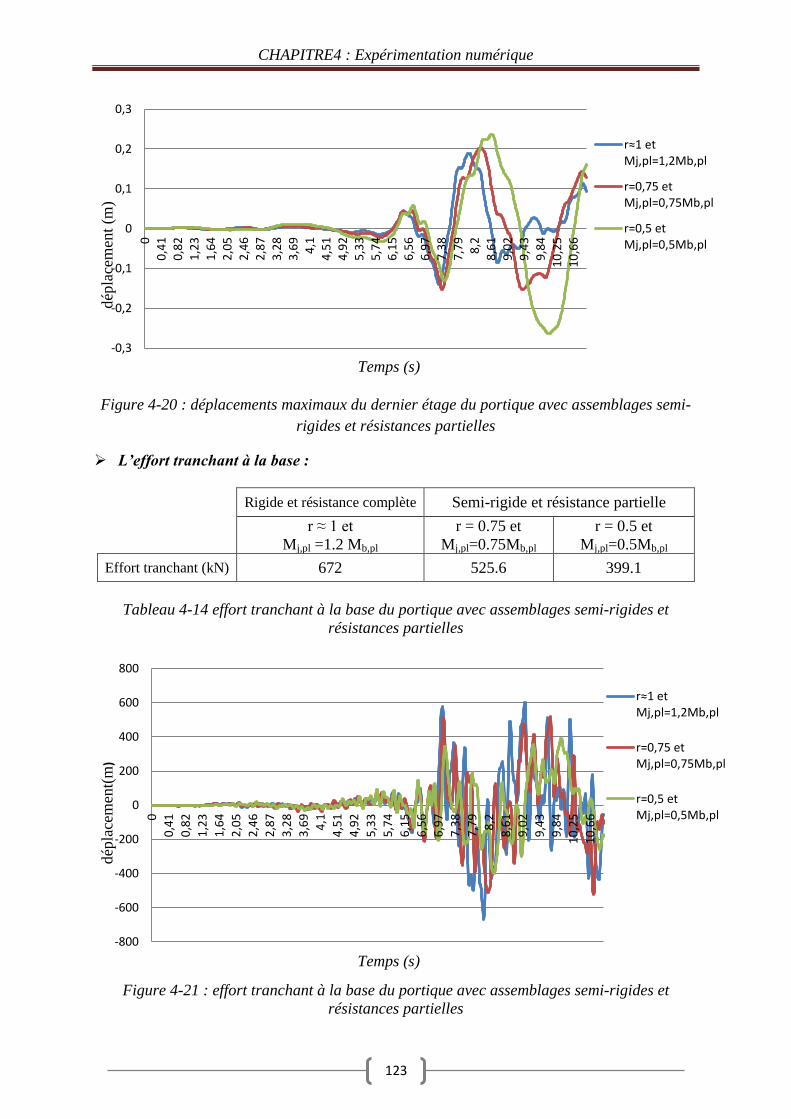
CHAPITRE4 : Expérimentation numérique
123
Figure 4-20 : déplacements maximaux du dernier étage du portique avec assemblages semi-
rigides et résistances partielles
L’effort tranchant à la base :
Tableau 4-14 effort tranchant à la base du portique avec assemblages semi-rigides et
résistances partielles
Figure 4-21 : effort tranchant à la base du portique avec assemblages semi-rigides et
résistances partielles
-0,3
-0,2
-0,1
0
0,1
0,2
0,3
0
0,4
1
0,8
2
1,2
3
1,6
4
2,0
5
2,4
6
2,8
7
3,2
8
3,6
9
4,1
4
,51
4
,92
5
,33
5
,74
6
,15
6
,56
6
,97
7
,38
7
,79
8
,2
8,6
1
9,0
2
9,4
3
9,8
4
10
,25
1
0,6
6
dép
lace
men
t (m
)
r≈1 et Mj,pl=1,2Mb,pl
r=0,75 et Mj,pl=0,75Mb,pl
r=0,5 et Mj,pl=0,5Mb,pl
-800
-600
-400
-200
0
200
400
600
800
0
0,4
1
0,8
2
1,2
3
1,6
4
2,0
5
2,4
6
2,8
7
3,2
8
3,6
9
4,1
4,5
1
4,9
2
5,3
3
5,7
4
6,1
5
6,5
6
6,9
7
7,3
8
7,7
9
8,2
8,6
1
9,0
2
9,4
3
9,8
4
10
,25
10
,66
dép
lace
men
t(m
)
r≈1 et Mj,pl=1,2Mb,pl
r=0,75 et Mj,pl=0,75Mb,pl
r=0,5 et Mj,pl=0,5Mb,pl
Rigide et résistance complète Semi-rigide et résistance partielle
r ≈ 1 et
Mj,pl =1.2 Mb,pl
r = 0.75 et
Mj,pl=0.75Mb,pl
r = 0.5 et
Mj,pl=0.5Mb,pl
Effort tranchant (kN) 672 525.6 399.1
Temps (s)
Temps (s)
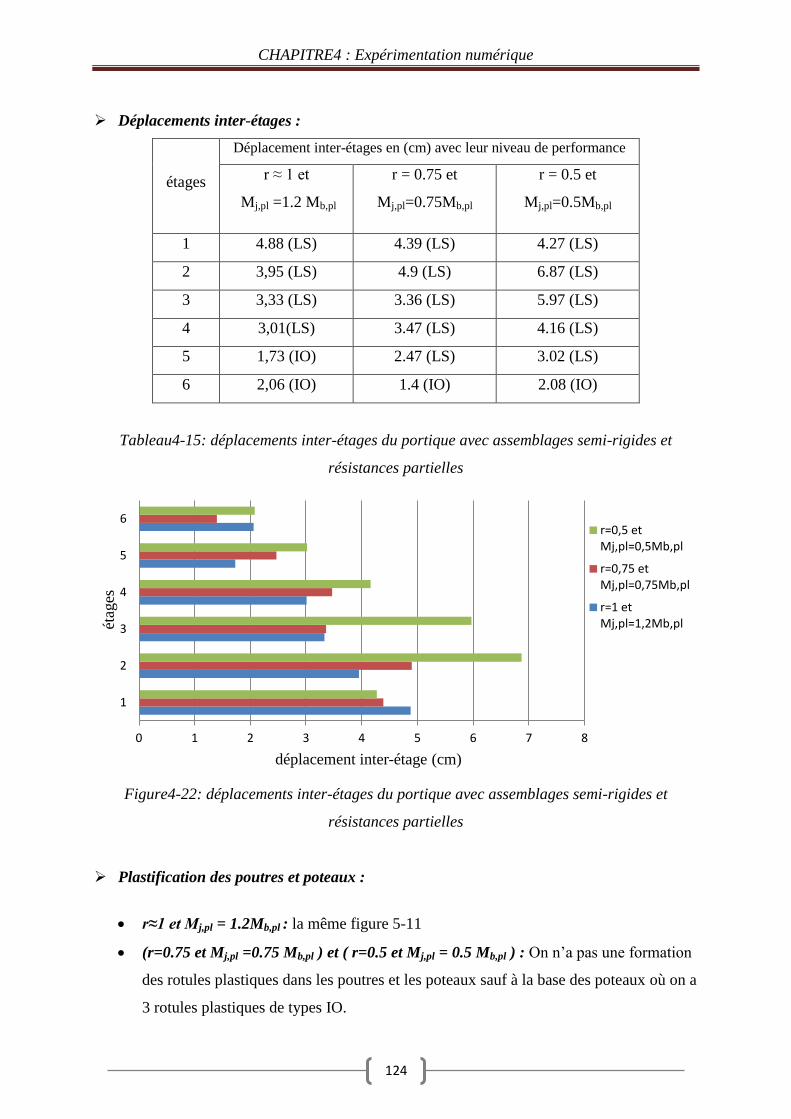
CHAPITRE4 : Expérimentation numérique
124
Déplacements inter-étages :
étages
Déplacement inter-étages en (cm) avec leur niveau de performance
r ≈ 1 et
Mj,pl =1.2 Mb,pl
r = 0.75 et
Mj,pl=0.75Mb,pl
r = 0.5 et
Mj,pl=0.5Mb,pl
1 4.88 (LS) 4.39 (LS) 4.27 (LS)
2 3,95 (LS) 4.9 (LS) 6.87 (LS)
3 3,33 (LS) 3.36 (LS) 5.97 (LS)
4 3,01(LS) 3.47 (LS) 4.16 (LS)
5 1,73 (IO) 2.47 (LS) 3.02 (LS)
6 2,06 (IO) 1.4 (IO) 2.08 (IO)
Tableau4-15: déplacements inter-étages du portique avec assemblages semi-rigides et
résistances partielles
Figure4-22: déplacements inter-étages du portique avec assemblages semi-rigides et
résistances partielles
Plastification des poutres et poteaux :
r≈1 et Mj,pl = 1.2Mb,pl : la même figure 5-11
(r=0.75 et Mj,pl =0.75 Mb,pl ) et ( r=0.5 et Mj,pl = 0.5 Mb,pl ) : On n’a pas une formation
des rotules plastiques dans les poutres et les poteaux sauf à la base des poteaux où on a
3 rotules plastiques de types IO.
0 1 2 3 4 5 6 7 8
1
2
3
4
5
6
déplacement inter-étage (cm)
étag
es
r=0,5 et Mj,pl=0,5Mb,pl
r=0,75 et Mj,pl=0,75Mb,pl
r=1 et Mj,pl=1,2Mb,pl
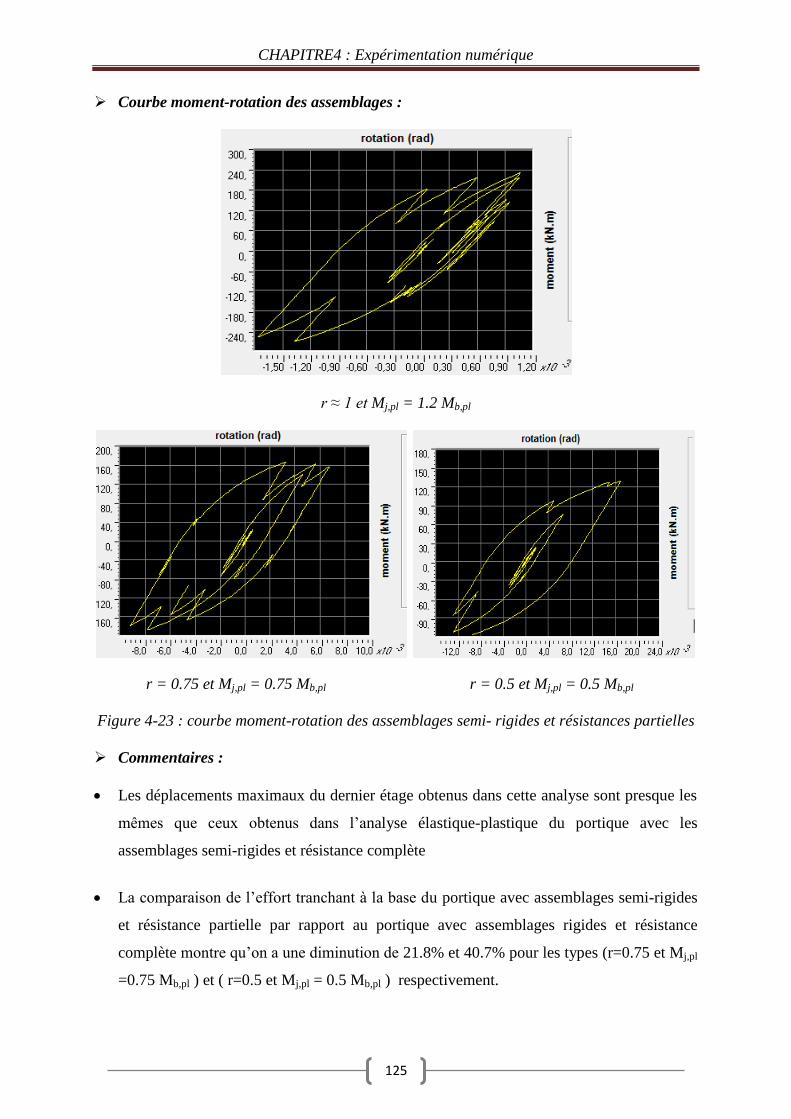
CHAPITRE4 : Expérimentation numérique
125
Courbe moment-rotation des assemblages :
r ≈ 1 et Mj,pl = 1.2 Mb,pl
r = 0.75 et Mj,pl = 0.75 Mb,pl r = 0.5 et Mj,pl = 0.5 Mb,pl
Figure 4-23 : courbe moment-rotation des assemblages semi- rigides et résistances partielles
Commentaires :
Les déplacements maximaux du dernier étage obtenus dans cette analyse sont presque les
mêmes que ceux obtenus dans l’analyse élastique-plastique du portique avec les
assemblages semi-rigides et résistance complète
La comparaison de l’effort tranchant à la base du portique avec assemblages semi-rigides
et résistance partielle par rapport au portique avec assemblages rigides et résistance
complète montre qu’on a une diminution de 21.8% et 40.7% pour les types (r=0.75 et Mj,pl
=0.75 Mb,pl ) et ( r=0.5 et Mj,pl = 0.5 Mb,pl ) respectivement.
CHAPITRE4 : Expérimentation numérique
126
le déplacement relatif maximal entre les étages du portique avec les assemblages de type
(r=0.75 et Mj,pl =0.75 Mb,pl ) donne presque les mêmes résultats du portique avec les
assemblages résistances complètes, mais pour ( r=0.5 et Mj,pl = 0.5 Mb,pl ) le déplacement
relatif augmente de 41%, et il est proche à la limite du niveau de performance CP et
dépasse aussi la limite exigée par l’Eurocode 8-1 dans le deuxième et le troisième étage.
La formation des rotules plastiques dans les poutres et les poteaux apparait seulement
dans le portique avec les assemblages rigides et résistance complète où les rotules
plastiques sont de type B et IO.
La figure 4-12 montre qu’on n’a pas une plastification des assemblages pour les deux
types d’assemblages (r=0.75 et Mj,pl =0.75 Mb,pl ) et ( r=0.5 et Mj,pl = 0.5 Mb,pl ) malgré la
diminution de résistance ce qui signifie que la semi-rigidité retarde la plastification des
assemblages et augmente leur capacité de rotation.
Conclusion générale et recommandations
127
Conclusion générale et recommandations
Conclusion générale :
Le but essentiel de la modélisation du comportement d’assemblage en vue de l’analyse
globale de structure est de permettre une évaluation plus précise du comportement
d’ensemble de la structure et de sa résistance. Le comportement réel d'un assemblage
qui est caractérisé par sa résistance de calcul, sa rigidité et sa capacité en rotation
peuvent avoir une influence considérable sur les distributions des efforts intérieurs
dans les éléments constitutifs de la structure, sur leur stabilité et sur les déplacements
de la structure sous charges verticales et horizontales. Ces efforts ne peuvent être
évalués de manière précise qu’au travers d’une modélisation qui approche le
comportement réel de l’ensemble.
Dans cet mémoire, une étude paramétrique est effectuée sur une seule structure
métallique non contreventée à six étages et deux travées dont l’objectif est d’étudier
l’influence de la semi-rigidité et la résistance partielle de l’assemblage sur les
caractéristiques dynamiques de cette structure, l’étude étant axée sur la variation
théorique de la résistance et de la rigidité des assemblages. La modélisation de ces
derniers est effectuée au moyen de SAP 2000 en utilisant l’élément LINK qui est basé
sur le comportement d'hystérésis proposé par Wen (1976). D’après les résultats
obtenus, on peut tirer les conclusions suivantes :
Le comportement dynamique des portiques avec les assemblages semi-rigides est
différent de leurs homologues rigides car la flexibilité des assemblages tend à
augmenter les périodes des modes inférieurs (en particulier le mode fondamental),
mais pour les modes supérieurs son effet est négligeable.
Les amplitudes de déplacement des portiques avec les assemblages semi-rigides
sont considérablement plus grandes que celles du portique rigide.
Conclusion générale et recommandations
128
L’utilisation des assemblages semi-rigides et résistances partielles donne un effort
tranchant à la base plus faible par rapport aux assemblages rigides et résistances
complètes, cette réduction conduit à une réduction du coût des infrastructures.
La semi- rigidité des assemblages retarde progressivement la formation des rotules
plastiques au niveau des poutres, poteaux et des assemblages.
le nombre, l'emplacement ainsi que l'ampleur des rotules plastiques au sein des
membres essentiels du portique peuvent varier considérablement en fonction de la
résistance des assemblages. Cela a des conséquences directes sur la ductilité de la
structure.
lorsque la résistance de calcul de l’assemblage est plus faible que celle de la poutre,
la plastification va se produire dans l’assemblage. Pour ce type d’assemblage, une
capacité de rotation suffisante est absolument nécessaire puisque l’essentiel des
déformations inélastiques se trouve localisé dans l’assemblage.
les assemblages partiellement résistants testés présentent un comportement
d’hystérésis ductile car ils sont caractérisés par une nette non linéarité de la courbe
moment-rotation avec un plateau étendu.
Le déplacement relatif entre les étages exprime d’une autre manière la demande de
ductilité sous l’action sismique considérée. Si la rigidité est diminuée
progressivement, les assemblages semi-rigides et résistance partielles donnent des
déplacements relatifs plus élevés par rapport aux assemblages rigides et résistances
complètes. En raison d’une plus grande déformabilité structurale, une autre
conséquence logique de ce résultat est l’augmentation des valeurs des rotations
exigées à la base des poteaux.
Du point de vue de la classification selon le FEMA 356, le déplacement relatif
entre les étages pour les assemblages semi-rigides et résistances partielles reste en
pratique identique à celui du cas étudié avec les assemblages rigides et résistances
Conclusion générale et recommandations
129
complètes, mais pour les critères de l’Eurocode 8-1, le déplacement relatif dépasse
la limite exigée si une grande diminution de la rigidité est présente.
En général, on peut dire que les portiques avec les assemblages semi-rigides et/ou
résistance partielles démontrent, dans certains cas, des qualités antisismiques
favorables et adéquates.
Recommandations :
Dans ce mémoire, on a montré que les performances sismiques des portiques
métalliques non contreventés peuvent être améliorées par l’utilisation des assemblages
semi-rigides et résistances partielles. Néanmoins, ces assemblages doivent être
considérés avec une prudence certaine surtout pour les zones de forte sismicité et pour
les structures de grande hauteur. Dans le but général de trouver les conditions
d’application des assemblages semi-rigides et partiellement résistants, on peut relever
quelques aspects importants qui ont des effets significatifs sur le comportement des
assemblages et l’ensemble de la structure.
Le premier aspect concerne la capacité de déformation dans l’analyse non linéaire
qui est nécessaire pour permettre une redistribution locale des efforts. Si cette
capacité n'existe pas, on peut craindre à une rupture fragile suite à des surcharges
locales. Donc un choix adéquat des détails des assemblages est vital pour assurer
une capacité de déformation suffisante, mais la capacité de rotation des
assemblages reste toujours une caractéristique difficile à évaluer, à cause des
différents composants qui les constituent : la platine d’extrémité, les boulons, les
raidisseurs, les soudures, etc. et c’est pour ça on trouve que les normes sismiques
exigent que la capacité de déformation doit être démontrée par des essais
expérimentaux.
Le deuxième aspect concerne l’influence significative des assemblages semi-
rigides sur le déplacement maximal de la structure et le déplacement entre les
étages surtout pour les structures plus élevées, où on a une diminution de la rigidité
Conclusion générale et recommandations
130
latérale de la structure lorsque la hauteur augmente, donc l’utilisation de ces
assemblages dans les zones sismiques doit être faite sous le contrôle de la stabilité
d’ensemble de la structure et celle des éléments.
Le troisième aspect qu’il faut prendre en considération, concerne l’intensité du
séisme où il semble que l’exigence de ductilité en rotation des assemblages semi-
rigides et résistances partielles n’a pas à être de la même sévérité dans les zones
sismiques intenses et les zones sismiques modérées.
Il y a d’autres paramètres qui peuvent influer sur le comportement général de la
structure étudiée par les chercheurs où il faut prendre en considération comme la
fatigue oligocyclique des assemblages avec une grande amplitude des déformations
plastiques, la déformation du panneau d’âme du poteau et l’effet de voilement local
de la poutre…etc.
Références bibliographiques
131
Références bibliographiques
[1] Abidelah A, Analyse numérique du comportement d’assemblages métalliques -
Approche numérique et validation expérimentale-, Thèse de doctorat, Université
Blaise Pascal- ClernontII, 2009, 195p.
[2] Aksoylar N.D, Elnashai A.S, Mahmoud H, Seismic performance of semi-Rigid
moment resisting frames under far and near field records, Journal of structural
engineering, 2011, 39 pages.
[3] Aribert J.M, Lachal A, Dinga O.N, Modélisation du comportement d’assemblages
métalliques semi-rigides de type poutre-poteau boulonnés par platine d’extrémité.
Construction Métallique, N° 1-1999, 22 pages.
[4] Cabrero J.M, Bayo E, Development of practical design methods for steel structures
with semi-rigid connections, Engineering Structures 27, 2005, pp 1125–1137.
[5] Chen W.F, Kishi N, Komuro M, semi-rigid connections handbook, 2011, J.Ross
Pub.
[6] Chen W.F, Lui F.M., Stability design of steel frames, 1991, Boca Raton: CRC
Press.394 p.
[7] Chen W.F, Practical analysis for semi-rigid frame design, Singapore, World
Scientific, 2000, 465p.
[8] Ciutina L. A, Assemblage et comportement sismique de portiques en acier et
mixtes acier- béton: Expérimentation et simulation numérique, Thèse de doctorat,
Institut National des Sciences Appliquées de Rennes, 2003, 306p.
[9] Coelho A.M.G, characterization of the ductility of bolted end plate beam -to-
column steel connections, Universidade de Coimbra, July 2004, 370p.
[10] Computers and Structures, Inc. CSI analysis reference manual for SAP2000-
ETABS and SAFE, June 2008.
Références bibliographiques
132
[11] Dehard J, MA1-Cours de charpentes métalliques : analyse des structures en acier,
2008, institu Hemes Gramme.
[12] Diaz C, Marti P, Victoria M, Querin O.M, Review on the modelling of joint
behaviour in steel frames, Journal of constructional steel research 67, 2011, pp 741-
758.
[13] Eurocode 3, Calcul des structures en acier-partie 1-1 : règles générales st règles
pour les bâtiments, NF EN 1993-1-1 (Octobre 2005), norme européenne (norme
française).
[14] Eurocode 3, Calcul des structures en acier-partie 1-8 : calcul des assemblages,
NF EN 1993-1-8 (Décembre 2005), norme européenne (norme française).
[15] Eurocode 8, Calcul des structures pour leur résistance aux séismes - Partie 1:
Règles générales, actions sismiques et règles pour les bâtiments, pr EN 1998-1,
Décembre 2003.
[16] FEMA 356 (Federal Emergency Management Agency), Prestandard and
commentary for the seismic rehabilitation of buildings, November 2000.
[17] Jaspart J.P, étude de la semi-rigidité des nœuds poutre-colonne et son influence
sur la résistance et la stabilité des ossatures en acier, Thèse de doctorat, Université de
Liège, 1990-1991, 563p.
[18] Haapio J, Heinusuo M, Minimum cost steel beam using semi-rigid joints, Journal
of structural mechanics Vol 43, No 1, 2010, pp 1-11.
[19] Landowski M, Lemoine B, Concevoir et construire en acier, 2005 collection
mémentos acier (Arcelor).
[20] Leçons ESDEP (European Steel Design Education Programme), Volume 11:
assemblages sous chargement statique.
Références bibliographiques
133
[21] Lehbari N, Kadid A, Fourar A, Smail K, Effect of semi-rigid girder connections
on the dynamic response of steel structures, Asian journal of civil engineering
(building and housing), vol 8, No 4 , 2007,p 375-388.
[22] Mahmoud M.T, Shahrin M, Nordin Y, Ahmed B.A.R, Sariffuddin S, Economic
aspects of the use of partial and full strength joints on multi-storey unbraced steel
frames, University Technology Malaysia, 2006, 254p.
[23] Maitre P, Formulaire de la construction métallique, 1997, Collection mémento
technique, 458p.
[24] Manfred A, Hirt R.B, Construction fondamental V10 : notions fondamentales et
méthodes de dimensionnement. Presses polytechniques et universitaires romandes
(école polytechnique fédérale de Lausanne).
[25] Minas E, Lemonis, charis J, Gantes, Mechanical modeling of the nonlinear
response of beam-to-column joints, Journal of constructional steel research 65, 2009,
pp 879-890.
[26] Mésic E, Plastification process of steel frames through discretization of plastic
zone, Architecture and Civil Engineering, Vol. 5, No 2, 2007, pp 87 - 94.
[27] Montassar S, Cours de construction métallique 1 : Assemblages boulonnés en
construction métallique, 2008-2009, Ecole national d’ingénieurs de Tunis.
[28] Morel J, Calcul des structures métalliques selon l’Eurocode 3. 1994. Eyrolles.
[29] Saranik M, Conception parasismique robuste de bâtiments à base d’assemblages
boulonnés, Thèse de doctorat, École centrale de Lyon, 2011, 225p.
[30] Takouachet M, Caractérisation des assemblages structuraux en construction
métallique selon l’EC3, Thèse de Magistère, Université Mentouri Constantine, 2008,
194p.