Embed Size (px)
Citation preview

SEMESTRE 4
2006-2007
MODULE F412 :
MÉTHODES ÉNERGÉTIQUES
PROBLÈMES et CORRIGES
G.LHERMET-G.VESSIERE

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 2
SOMMAIRE
1. MÉTHODE DE CLAPEYRON ............................................................................................................................... 32. MÉTHODE DE MAXWELL-MOHR ET DE CASTIGLIANO.............................................................................. 173. MÉTHODE DES ÉLÉMENTS FINIS ................................................................................................................... 594. PROBLEMES DE SYNTHESE............................................................................................................................. 81ANNEXES................................................................................................................................................................ 90
ANNEXE A1. INTEGRALES DE MOHR............................................................................................................. 91ANNEXE A2. MOMENTS FLÉCHISSANTS DANS QUELQUES CAS SIMPLES : ............................................ 98

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 3
1. MÉTHODE DE CLAPEYRON
PROBLÈME N°1
Les barres AB et BC (de même section droite A et de même matériau) sont articulées en A, B et C. Une force verticale P est appliquée en B.1°) Déterminez l'expression littérale de l'énergie de déformation élastique emmagasinée par les deux barres en fonction de P, L, E et A.2°) En déduire l'expression littérale du déplacement vertical du point B.3°) Peut-on avec cette méthode, calculer la déplacement horizontal de B ?Application numérique : P=10kN, L=2m, E=200GPa et A=1cm2. Calculez la valeur (en J) de l'énergie de déformation élastique et la valeur du déplacement vertical
du point B en mm).
Réponses : mm83.3EA
)PL22(1• 19,14J2EA
L)P22(1W VB
2
def =+
==+
=
RÈPONSES N°1
1 )Nous devons pour appliquer la méthode de Clapeyron :
défext WW = calculer l’énergie de déformation emmagasinée dans les deux barres, et l’identifier avec le travail de la force extérieure
DPWext 21
= vBext PW δ21
=
∑ ∫ +++++=barres Z
Z
Y
Y
G
XZL YXdéf dx
EIM
EIM
GIM
GAT
GAT
EANW )
222222(
2222
0
22
Compte tenu que les deux barres sont articulées en A, B, et Celles ne sont soumises qu’à des efforts normaux.
( ) ( ) dxEA
NdxEA
NdxEA
NWC
B
BCXB
A
ABX
barres
L Xdéf )
2()
2()
2(
22
0
2
∫∫∑ ∫ +==
A
C
B
P
45°
L
B
P
45°
L
A
C

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 4
Pour trouver les efforts normaux s’exercant dans les barres AB et CD, mettons en équilibre le nœud B :
−==
⇒=+−
=−−
PFPF
FP
FF
1
2
2
21 2
022
022
Après application du principe d’action mutuelle
PN ABX −= 2PN BC
X =d’où :
( ) ( ) dxEA
PdxEAPW
LL
déf )2
2()2
(2
00
2 2
∫∫ +−
=
dxEAPdx
EAPW
LL
déf ∫∫ +=2
0
2
0
2
2
[ ] [ ] 20
2
0
2
2LL
déf xEAPx
EAPW +=
22
22
LEAPL
EAPWdéf += ( )221
2
2
+=EA
LPWdéf
2 )
Appliquons la méthode de Clapeyron : défext WW =
vBext PW δ21
= ( )2212
2
+=EA
LPW déf
En identifiant : ( )221+=EA
LPvBδ
3 )Non, car l’identification implique qu’une seule charge.
Application numérique : P=30kN, L=2m, E=200GPa et A=1cm2.
( ) ( ) ( ) NmmEA
LPWdéf 1914222110010.2002
10.210.102212 3
3232
=+××
=+= Wdéf=19,142 J
( ) ( ) mmEA
LPvB 828,3221
10010.20010.210.10221 3
33
=+×
×=+=δ •vB=3,83 mm
B
P
45°
X
Y
F2
F1
B
PL
A
C
P
P 2
P 2
L 2

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 5
ROBLÈME N°2
1°) Déterminez l'expression de l'énergie de déformation élastique en fonction de P, L, A, E et n. 2°) En déduire l'expression du raccourcissement de la barre. Déterminer l'expression du raccourcissement de la barre pour n=1 et n=2.
Réponses:
)2=(n 8EA5PL•L 1)=(n
EAPL•L
n11
2EAPL•L
n11
4EALPW 22
2
def ==
+=
+=
RÈPONSES N°2
1)La poutre ABC est soumise à de la compression pure : PN AB
x −= PN BCx −=
( ) ( ) dxEA
NdxAEn
NWC
B
BCxB
A
ABx
déf )2
()2
(2
2
2
∫∫ +=
( ) ( ) ( ) ( ) dxEAPdx
AEnPdx
EANdx
AEnNW
LL
LLL
BCx
L ABx
déf )2
()2
()2
()2
(2
20 2
2
2
20 2
222
∫∫∫∫−
+−
=+=
[ ] [ ]EA
LPAEn
LPxEAPx
AEnPdx
EAPdx
AEnPW L
L
LLL
L
déf 442222
2
2
2
2
2202
2
2
22
02
2
+=+=+= ∫∫
P
L/2
BA
n2AA
L/2
C
P
L/2
B
n2A
A
L/2
C
A
G x
ZY

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 6
+= 2
2 114 nEA
LPWdéf
2)Appliquons la méthode de Clapeyron : défext WW =
Le déplacement associé à la charge P en C (•hC), est le raccourcissement de la barre •L :
DPWext 21
= hCext PW δ21
=
+= 2
2 1142
1nEA
LPP hCδ
+= 2
112 nEAPL
hCδ
Ce déplacement étant positif, il s’effectue dans le même sens que la charge . C’est donc bien un raccourcissement de la barre.
+=∆ 2
112 nEAPLL
Si n=1EAPLL =∆ Si n=2
EAPLL
85
=∆
PROBLÈME N°3
1°) Déterminez l’expression de l’énergie de déformation élastique en fonction de C, L, G et d. En déduire l’expression de la rotation de la section droite C.2°) L’énergie de déformation élastique admissible est de 12J, L=1m, d=40mm, G=80 GPa. Calculez la valeur du couple maximum admissible C (en Nm).et la valeur de la rotation de la section C (en °).
Réponses :4
2
def dGL12CW
π= 4dG
24CL•π
= C = 802.1 Nm θC = 1.7°
C
A
B
C
d 2
d
L/2
L

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 7
RÈPONSES N°3
1°)Nous devons pour appliquer la méthode de Clapeyron : défext WW = ,calculer l’énergie de déformation emmagasinée dans la poutre ABC, et l’identifier avec le travail exterieur du au couple C.Le déplacement associé au couple C en C (•x
C), est la rotation suivant l’axe du couple de la
section C :
DPWext 21
= Cxext CW θ
21
=
∑ ∫ +++++=barres Z
Z
Y
Y
G
XZL YXdéf dx
EIM
EIM
GIM
GAT
GAT
EANW )
222222(
2222
0
22
La poutre ABC est soumise à de la torsion pure : CM CBx −= CM BA
x −=
( ) ( ) dxGI
MdxGI
MdxGIMW
A
B BA
BAxB
C CB
CBxA
C CAx
défGGG
)2
()2
()2
(222
∫∫∫ +==
( ) ( ) dxGICdx
GICdx
GICdx
GICW
L
LBA
L
CB
L
L BA
L
CBdéfGGGG
∫∫∫∫ +=−
+−
= 23
2
20
22
3
2
20
2
22)
2()
2(
22
CC
d•2
d
L/2
L
A
BG
xZ
Y

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 8
+=+= BACBBACBdéf
GGGGIIG
LCGI
LCGI
LCW 12
1224
222
avec 32
4dI CBG
π= et ( )
322
4dI BA
G
π=
4
212dG
LCWdéf π=
Cxext CW θ
21
= et 4
212dG
LCWdéf π= , identifions les 2 expressions :
424
dGCLC
x πθ =
2°) Application numérique : Wdéf=12J, L=1m, d=40mm, G=80 GPa
NmmLWdG
CdG
LCW défdéf 802121
10001210.124010.80
1212 3432
14
4
2
=×
×××=
=⇒=
ππ
πC=802,1 Nm
rddGCLC
x 0299,04010.8010008021212424
434 =××××
==ππ
θ •xC= 1°71
PROBLÈME N°4
En ne tenant compte que de l’énergie de déformation élastique due au moment de torsion et sachant que C0 = 63 Nm, G = 80 GPa, calculez :1°) L'énergie de déformation élastique (en J).2°) La rotation de A (en d°).
Réponses : °ϕ= 9.72= J5.35W Adef
C0
600
900
5620
Φd0 = 18
Φd = 26
B
P
D
P
C
A
P

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 9
RÈPONSES N°4
1°)
Les arbres AB et CD sont soumis à de la torsion pure : 0CM ABx =
2056
0 ×== CCM CDx
( ) ( ) dxGI
MdxGI
MWD
C CD
CDxB
A AB
ABx
défGG
)2
()2
(22
∫∫ +==
dxGICdx
GIC
dxGICdx
GICW CDABCDABdéf
GGGG
∫∫∫∫ +=+=900
0
600
0
2900
0
600
0
20
22)
2()
2(
20
2
×+=
××+=+= CDABCDABCDABdéf
GGGGGGIIG
CGI
CGI
CGI
CGI
CW 2
22
2
2222
2056450300
2056450300450300 000
20
( ) NmmIIG
CW CDABdéf
GG
53452620
325645018
3230010.80
10.6320
5645030042
2
43
23
2
220
=
×
××+
××
=
×+=
π
Wdéf=5,35 JLe déplacement associé au couple C0 en A (•x
A), est la rotation suivant l’axe du couple de la
section A :
DPWext 21
= dans notre cas : Axext CW θ02
1=
Méthode de Clapeyron : défext WW = d’où : rdNmmC Ax
Ax 170,0
10.63534525345
21
30 =×
=⇒= θθ
•xA= 9°72
Ød=26mm
Ød0=18mm
A
BC
D
C0=63Nm
20mm
56mm
600mm
900mm
B
C C0
20mm
56mm
C2056
0 ×= CC

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 10
PROBLÈME N°5
Déterminez l'expression littérale du déplacement vertical de A en prenant en compte le moment de flexion et l'effort tranchant.Montrez que si ν = 0.3 et L/h = 10 l'erreur commise en négligeant l'effort
tranchant est inférieure à 1%.
Réponses : )1000.65(1
3EIPL)
Lh
2•1(1
3EIPL
GAPL
3EIPL•
Y
3
2
2
Y
3
Y
3
VA +=+
+=+= erreur 0.65%
RÈPONSES N°5
Détermination du travail extérieur :
Le déplacement associé à la charge P en A (•vA
), est le déplacement vertical de la section A :
DPWext 21
= Avext PW δ
21
=
Détermination de l’énergie de déformation :
∑ ∫ +++++=barres Z
Z
Y
Y
G
XZL YXdéf dx
EIM
EIM
GIM
GAT
GAT
EANW )
222222(
2222
0
22
A
PL
b
Bh Y x
GG
Z Zx
P
L
Zx
B
A
G x h
bY

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 11
Nous devons chercher le Torseur de Section en G de la barre AB :
( )
−
−=ℑ
0
000
sec XLPP
tion
G
G
La barre est donc soumise à un effort tranchant constantde B à A : PTZ −= ,et à un moment de flexion linéaire : ( )XLPMY −=
d’où :
Y
déf
Z
déf
MT
Y
YLZL
Y
YZL
déf WWdxEIMdx
GATdx
EIM
GATW +=+=+= ∫∫∫ )
2()
2()
22(
2
0
2
0
22
0
Calculons l’énergie de déformation due à l’effort tranchant :
[ ]GA
LPxGAPdx
GAPdx
GAPdx
GATW LLLZLTZ
déf 2222)
2(
2
0
2
0
2
0
22
0===== ∫∫∫
Puis l’énergie de déformation due au moment fléchissant:
( )( ) ( ) ( )Y
L
Y
L
Y
L
YY
YLM
EILPxL
EIPdxxL
EIPdx
EIxLPdx
EIMW Y
déf 63222)
2(
32
0
3
0
22
0
22
0=
−=−=
−== ∫∫∫
D’où :
Y
MTdéf EI
LPGA
LPWWW Y
déf
Z
déf 62
322
+=+=
Application numérique : si ν = 0.3 et L/h = 10
+=+=
EL
GAI
ILP
EILP
GALPW Y
YYdéf 3262
22322
or ( )υ+=
12EG
( )
+
+=232
211
6 Lh
EILPW
Ydéf
υ ( ) ( )
+
+= 232
1,02
3,0116 Y
déf EILPW
( ) ( )
+=+=+= −−
10065,01
610.65,01
610.5,61
6
322
323
32
YYYdéf EI
LPEI
LPEI
LPW
Conclusion :
Y
M
EILPW Y
déf 6
32
= et 10065,0
6
32
×=Y
T
EILPW Z
déf

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 12
L’énergie de déformation due à l’effort tranchant, ne représente que moins de 1 % de l’énergie de déformation totale.
Nous en concluons que l’énergie de déformation due à l’effort tranchant est en règle générale négligeable par rapport à l’énergie de déformation due au moment
de flexion.
Expression littérale du déplacement vertical de A
Appliquons la méthode de Clapeyron : défext WW =
Avext PW δ
21
= et
+=
10065,01
6
32
Ydéf EI
LPW En identifiant :
+=
10065,01
3
3
Y
Av EI
PLδ
La flèche due à l’effort tranchant ne représente que 0,65% du déplacement vertical de la section A.
PROBLÈME N°6
Déterminez en ne tenant compte que du moment fléchissant l'expression littérale de la rotation de la section droite C en fonction de C, L, a, b, E et IY.
Réponses :2
Y
33
C L3EI)bC(a• +
=
AC
B
a bC
L
xG
Z

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 13
RÈPONSES N°6
Détermination du Torseur Externe: Voir module F112
Détermination du Torseur de Section: Voir module F112 (Annexes)
Détermination du travail extérieur :
Le déplacement associé au couple C en C (•YC
), est la rotation suivant l’axe du couple de la section C :
DPWext 21
= CYext CW θ
21
=
C
L
A B
G x
Z Y
C
a b
C
L
A BC
a bC/LC/L
C
L
A BC
a b C/LC/L
G x
Z Y
TZ
A B
C/L+
MY
AB
Ca/L
C
C
Cb/L
+-
LCTZ =
( )XLLCMY −−=
XLCMY =

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 14
Détermination de l’énergie de déformation :
∑ ∫ +++++=barres Z
Z
Y
Y
G
XZL YXdéf dx
EIM
EIM
GIM
GAT
GAT
EANW )
222222(
2222
0
22
dxEIM
GATW
Y
YZB
Adéf )22
(22
+= ∫
Nous devons négliger l’énergie de déformation due à l’effort tranchant par rapport celle
emmagasinée par la flexion : dxEIMW
B
AY
Ydéf ∫=
2
2
( )dx
EI
XLLC
dxEI
XLC
dxEIMdx
EIMW
B
CY
C
AY
B
CY
YC
AY
Ydéf ∫∫∫∫
−−
+
=+=2222
22
22
( ) ( ) ( )2
3323
0
3
2
22
0
22
2
63322 LEIbaCXLX
LEICdxXLdxX
LEICW
Y
L
a
a
Y
L
a
a
Ydéf
+=
−+
=
−+= ∫∫
Appliquons la méthode de Clapeyron : défext WW =
CYext CW θ
21
= et ( )
2
332
6 LEIbaCW
Ydéf
+= En identifiant :
( )2
33
3 LEIbaC
Y
CY
+=θ
PROBLÈME N°7
Déterminez en ne tenant compte que du moment fléchissant l'expression littérale de la flèche verticale de la section droite C en fonction de P, L, a, b, E et IY.
Réponses :L3EI
bPa•Y
22
VC =
A C B
a bP
L
xG
Z

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 15
RÈPONSES N°7
Détermination du Torseur Externe: Voir module F112
Détermination du Torseur de Section: Voir module F112 (Annexes)
Détermination du travail extérieur :
Le déplacement associé à la charge P en C (•vC
), est le déplacement vertical de la section A :
DPWext 21
= Cvext PW δ
21
=
P
L
A B
G x
Z Y
C
a b
P
L
A BC
a bPa/LPb/L
P
L
A BC
a b Pa/LPb/L
G x
Z Y
TZ
AB
Pb/L+
MY
AB
C
C
+
LPbTZ =
( )XLL
PaMY −=XL
PbMY =
- Pa/L
Pab/LL
PaTZ −=

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 16
Détermination de l’énergie de déformation :
∑ ∫ +++++=barres Z
Z
Y
Y
G
XZL YXdéf dx
EIM
EIM
GIM
GAT
GAT
EANW )
222222(
2222
0
22
dxEIM
GATW
Y
YZB
Adéf )22
(22
+= ∫
Nous devons négliger l’énergie de déformation due à l’effort tranchant par rapport celle
emmagasinée par la flexion : dxEIMW
B
AY
Ydéf ∫=
2
2
( )dx
EI
XLL
Pa
dxEI
XL
Pb
dxEIMdx
EIMW
B
CY
C
AY
B
CY
YC
AY
Ydéf ∫∫∫∫
−
+
=+=2222
22
22
( ) ( )
−+
=
−+= ∫∫
L
a
a
Y
L
a
a
Ydéf
XLaXbLEI
PdxXLadxXbLEI
PW3322
32
0
32
2
222
0
222
2
( ) ( )2
222
2
222
2
32322
666 LEILabP
LEIbaabP
LEIbaabPW
YYYdéf =
+=
+=
LEIabPW
Ydéf 6
222
=
Appliquons la méthode de Clapeyron : défext WW =
Cvext PW δ
21
= et LEIabPW
Ydéf 6
222
= En identifiant : LEI
aPbY
Cv 3
22
=δ

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 17
2. MÉTHODE DE MAXWELL-MOHR ET DE CASTIGLIANO
PROBLÈME N°8
En appliquant la méthode de MAXWELL-MOHR calculer les déplacements de A et de B.On donne : P = 30 kN, Q= 150 kN, E= 70 GPa.
Réponses : mm1,94• mm1,12• BA =−=
RÈPONSES N°8
Considérons l’état initial E0, et utilisons la notation charges généralisées Pi et déplacements généralisés associés Di :
A PC B
d=20
800 600
Q
D=30
800
D=30
d=20
600
A
C P2=QB P1=P
Etat initial
E0
P
800
D=30
d=20
600
A
C QB

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 18
Le déplacement généralisé D1 associé à la charge généralisée P1 est le déplacement linéique dans la direction de P1 de la section A.
Le déplacement généralisé D2 associé à la charge généralisée P2 est le déplacement linéique dans la direction de P2 de la section B.
[ ] [ ][ ]PfD = ou
=
2
1
2221
1211
2
1
PP
ffff
DD
2121111 PfPfD +=
2221212 PfPfD +=
La matrice carrée [f] est la matrice de flexibilité de la structure.
Chaque coefficient d’influence fij est calculé par le théorème de Maxwell-Mohr
∑ ∫ ++++=barres Z
jZiZ
Y
jYiY
G
jXiXjZiZL
0
jYiYjXiXij dx)
EI)m()m(
EI)m()m(
GI)m()m(
GA)t()t(
GA)t()t(
EA)n()n(
(f
Pour les déterminer nous devons décomposer l’état initial E0, en deux états unitaires E1 et E2
La poutre ABC, dans les 3 états E0, E1 et E2 n’est soumise qu’à des efforts normaux :
( ) ( )dx
EAnn
fA
C
jXiXij ∫=
( ) ( ) ( ) ( ) ( ) ( )dx
EAnn
dxEA
nndx
EAnn
fA
BBA
jXiXB
CCB
jXiXA
C
jXiXij ∫∫∫ +==
AC P2
= B P1
Etat initial
E0
AC
B P1=1
AC
P2=1B
Etat unitaire
E1
Etat unitaire
E2
E0 • P1×E1+P2×E2

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 19
Pour calculer les fij, nous devons chercher les diagrammes des efforts normaux dans les deux états unitaires :
( ) ( ) ( ) ( ) dxEA
nndxEA
nnfBA
XX
CB
XX ∫∫ +=1400
80011
800
011
11
dxEA
dxEA
fBACB
∫∫×
+×
=1400
800
800
0111111
dxEA
dxEA
fBACB
∫∫ +=1400
800
800
01111
232311 2010.704600
3010.704800600800
×××
+××
×=+=
ππBACB EAEAf
511 10.345,4 −=f
( ) ( ) ( ) ( ) dxEA
dxEA
nnfBACB
XX ∫∫ +=1400
80022
800
022
2200
( ) ( ) dxEA
fCB
∫−−
=800
022
2211
2322 3010.704800800××
×==
πCBEAf
522 10.616,1 −=f
( ) ( ) ( ) ( ) dxEA
ndxEA
nnfBA
X
CB
XX ∫∫ +=1400
80021
800
021
120
( ) ( ) dxEA
fCB
∫−+
=800
022
1211
Matrice de flexibilité :
2312 3010.704800800××
×−=−=
πCBEAf [ ] 15
616,1616,1616,1345,4
10 −−
−
−= mmNf
512 10.616,1 −−=f
Nous en déduisons la matrice des déplacements généralisés :
[ ] [ ][ ]PfD =
=
2
1
2221
1211
2
1
PP
ffff
DD 35
2
1 1015030
616,1616,1616,1345,4
10
−
−=
−
DD
mmD 12,110.15010.616,110.3010.345,4 35351 −=×−×= −−
mmD 94,110.15010.616,110.3010.616,1 35352 =×+×−= −−
D1 est négatif : le déplacement de la section A s’effectue en sens inverse de celui de l’application de la charge P1. •A=-1,12 mmD2 est positif : le déplacement de la section B s’effectue dans le même sens que celui de l’application de la charge P2. •B=-1,94 mm
800
D=30
d=20
600A
CB P1=1
Etat unitaire
E1
G x
ZY
1+(nX)1
800
D=30
d=20
600A
CP2=1
B
Etat unitaire
E2
G x
ZY
1-(nX)2

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 20
PROBLÈME N°9Ce problème est le même que le problème 1 qui a été résolu partiellement par la méthode de CLAPEYRON.
Les barres AB et BC (de même section droite A et de même matériau) sont articulées en A, B et C. Une force verticale P1 est appliquée en B. On veut calculer le déplacement vertical et le déplacement horizontaldu point B par la méthode de MAXWELL-MOHR.
Suggestion : Rajoutez en B une force horizontale fictive P2 pour calculer le déplacement horizontal.
1°) Déterminer l’expression littérale de la matrice de flexibilité de la structure (mettre L/EA en facteur).2°) En déduire l'expression littérale du déplacement vertical et du déplacement horizontal du point B.
Application numérique : P1=10kN, L=2m, E=200GPa et A=1cm2. Calculez la valeur du déplacement vertical et du déplacement horizontal du point B (en mm).
Réponses :
[ ]
−−+
=111)221(
EALf
2°) ←−=−==↓=+
== 1mmEAPLD• mm3.83
EA)PL22(1D• 2HB1VB
RÈPONSES N°9
La méthode de Maxwell Mohr ou méthode de la charge unité ne permet de calculer que les déplacements des points d’applications des charges généralisées
Sur le problème initial qui nous est proposé, nous ne pouvons donc déterminer que le déplacement vertical du point B.
Nous allons donc créer un problème plus général, dont l’initialne sera qu’un cas particulier.
Nous désirons connaître le déplacement horizontal de la section B. Il est donc nécessaire qu’il existe en B une charge horizontale. Appliquons alors en B une charge « fictive » P2 :
A
C
B
P1
45°
L
P2
C
B
P
45°
L
A

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 21
Nous allons donc travailler sur l’état E0’. Décomposons ce dernier en deux états unitaires E1
et E2.
C
B
P
45°
L
A
Etat initial
E0C
B
P1
45°
L
A
Etat intermédiaire
E0’
P2
E0 • E0’{ P1=P ; P2=0 }
C
B
P
45°
L
A
Etat initial
E0
E0 • E0’ { P1=P ; P2=0 }
C
B
P1
45°
L
A
Etat intermédiaire
E0’
P2
C
B
P1=1
45°
L
A
Etat unitaire
E1
C
B
45°
L
A
Etat unitaire
E2
P2=1E0’ • P1×E1+P2×E2

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 22
1°) Expression littérale de la matrice de flexibilité de la structure :Cherchons les efforts normaux s’exercant sur les deux barres, et pour les deux états unitaires.
( )( ) 2
11
1
1
+=
−=BC
AB
x
x
nn
Etat a
( )( ) 0
12
2
2
=+=
BC
AB
x
x
nn
Etat a
Chaque coefficient d’influence fij est calculé par le théorème de Maxwell-Mohr
∑ ∫ ++++=barres Z
jZiZ
Y
jYiY
G
jXiXjZiZL jYiYjXiXij dx
EImm
EImm
GImm
GAtt
GAtt
EAnn
f ))()()()()()()()()()()()(
(0
Dans notre cas :( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
dxEA
nndx
EA
nndx
EA
nndx
EA
nndx
EAnn
fL j
BCi
BCL j
ABi
ABC
B
jBC
iBC
B
A
jAB
iAB
barres
L jXiXij
XXXXXXXX ∫∫∫∫∑ ∫ +=+==2
000)
)()((
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )2212211 2
011
0112
011
011
11 +=+−−
=+= ∫∫∫∫ EALdx
EAdx
EAdx
EAnn
dxEA
nnf
LLLBCBC
LABAB
XXXX
( ) ( ) ( ) ( ) ( ) ( )EALdx
EAdx
EAnn
dxEA
nnf
LLBCBC
LABAB
XXXX =++
=+= ∫∫∫ 0222
022
022
2211
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )EALdx
EAdx
EAdx
EAnn
dxEA
nnf
LLLBCBC
LABAB
XXXX −=++−
=+= ∫∫∫∫2
021
0212
021
021
120211
[ ]
−−+
=111)221(
EALf
C
BP1=1
45°
L
A
Etat unitaire
E1
C
B
45°
L
A
Etat unitaire
E2
P2=1
2
1-
(nXAB)1
+(nX
BC)1
1+
(nXAB)2

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 23
2°) Expression littérale du déplacement vertical et du déplacement horizontal du point B :
Dans l’état E0’ [ ] [ ] [ ]'0'0'0 EEE PfD =
'0'0'02
1
2
1
111)221(
EEBh
Bv
E PP
EAL
DD
−−+
=
=
δδ
Dans l’état E0
−+
=
−−+
=
1)221(
0111)221(
00EAPLP
EAL
EEBh
Bv
δδ
Application numérique : P1=10kN, L=2m, E=200GPa et A=1cm2.
mmEAPLB
v 828,3)221(10010.20010.210.10)221( 3
33
=+×
×=+=δ •v
B=3,83 mm
mmEAPLB
h 110010.20010.210.10
3
33
−=×
×−=−=δ •h
B=-1 mm
Le déplacement horizontal de B s’effectue en sens inverse de la charge « fictive » P2
PROBLÈME N°10
En appliquant la méthode de MAXWELL-MOHR et en ne tenant compte que de l’énergie de déformation élastique due au moment fléchissant, déterminez en fonction de P, L, E et d l’expression littérale du déplacement vertical et de la rotation en C. En déduire l’expression littérale de l’énergie de déformation.Application numérique : P=1425N, E=210 GPa, L=1m, et d=40mm. Calculez Wdéf en Joules.
Réponses : 4
3
VC •EdP20L• =
4
2
C •EdP24L• = 4
23
def •EdP10LW = 12JWdef =
RÈPONSES N°10
Sur le problème qui nous est proposé, nous ne pouvons déterminer que le déplacement vertical de la section C.
Nous allons donc créer un problème plus général, dont l’initial ne sera qu’un cas particulier.
Nous désirons connaître la rotation de la section C. Il est donc nécessaire qu’il existe en C un moment « fictif » porté par l’axe de la rotation cherchée .Appliquons alors en C un moment « fictif » P2 suivant l’axe Y:
A
P
L L/2
CB
Z
xG
D d= 2d

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 24
Constituons deux états unitaires de l’état E0’ et cherchons en les diagrammes des moments:
P1=1
d•2
d
L/2
L
G x
ZY
A
B
C
d•2
dG x
ZY
P2=1
A
B
C
Etat unitaire
E1
E0’ • P1×E1+P2×E2
Etat unitaire
E2
(mY)1
+
L/2L
+(mY)2
1
3L/2
L/2
( ) XLmy −=2
31
( ) 12
+=ym
P
d•2
d
L/2
L
A
B
C
Gx
ZY
Etat intermédiaire
E0’
Etat initial
E0
E0 • E0’{ P1=P ; P2=0 }
P1
d•2
d
L/2
L
A
B
C
Gx
Z
P2

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 25
Chaque coefficient d’influence fij est calculé par le théorème de Maxwell-Mohr
∑ ∫ ++++=barres Z
jZiZ
Y
jYiY
G
jXiXjZiZL jYiYjXiXij dx
EImm
EImm
GImm
GAtt
GAtt
EAnn
f ))()()()()()()()()()()()(
(0
Dans notre cas nous ne tenons compte que de l’énergie de déformation due au moment mY :
dxEI
mmf
C
AY
jYiYij ∫=
)()(
Compte tenu de la discontinuité de section en B : dxEI
mmdx
EImm
fC
B BCjYiYB
A ABjYiY
ijYY
∫∫ +=)()()()(
Calcul de f11 :
dxEI
XLXL
dxEI
XLXL
fL
L BC
L
ABYY
∫∫−−
+−−
= 23 11
0
11
11
)2
3()2
3()2
3()2
3(
Utilisons le tableau des Intégrales de Mohr pour calculer ces intégrales :
En notation « symbolique » :
Or 16
4dI ABY
π= et
64
4dI BCY
π=
+
+×+
=
22314
2223
23
3116 222
411LLLLLLL
dEf
π
4
3
1120
dELf
π=
Calcul de f12 :
dxEI
XL
dxEI
XL
fL
L BC
L
ABYY
∫∫+−
++−
= 23 21
0
21
12
)1()2
3()1()2
3(
( )
+
+
××=
21
2214
2231
2116
412LLLLL
dEf
π
4
2
1224
dELf
π=
f11 = 1/EIyAB
L
3L/2L/2
+
2
+ 1/EIyBC
L/2
L/2
+
2
f11 = 16/E•d4
L
3L/2L/2
+
2
+ 64/E •d4
L/2
L/2
+
2
f12 = 16/E•d4
L
3L/2L/2
+ + 64/E •d4
L/2
L/2
+L+x1
L/2+x1

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 26
Expression littérale du déplacement vertical C.
Dans l’état E0’ [ ] [ ] [ ]'0'0'0 EEE PfD =
'0'0'02
1
2221
1211
2
1
EECY
Cv
E PP
ffff
DD
=
=
θδ
Dans l’état E0
0002221
1211
EECY
Cv P
ffff
=
θδ
4
3
1120
dEPLPfC
v πδ == •v
C=20PL3/E•d4
Expression littérale de la rotation en C.
Dans l’état E0’ [ ] [ ] [ ]'0'0'0 EEE PfD =
'0'0'02
1
2221
1211
2
1
EECY
Cv
E PP
ffff
DD
=
=
θδ
Dans l’état E0
0002221
1211
EECY
Cv P
ffff
=
θδ
4
2
2124
dEPLPfC
Y πθ == •Y
C=24PL2/E•d4
Expression littérale de l’énergie de déformation.
Dans l’état E0’ [ ][ ][ ] [ ]'0
'02
1
2221
1211212
121
EE
tdéf P
Pffff
PPPfPW
==
Dans l’état E0 [ ] 4
322
112221
1211 1021
00
21
dELPPf
Pffff
PWdéf π==
=
Application numérique : P=1425N, E=210 GPa, L=1m, et d=40mm.
43
32
4
32
4010.210100014251010××
××==
ππdELPWdéf Wdéf=12J

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 27
PROBLÈME N°11
En appliquant la méthode de CASTIGLIANO et en ne tenant compte que de l’énergie de déformation élastique due au moment fléchissant :a) Déterminez l'expression littérale de la flèche maximum (en C) et des rotations aux extrémités A et B en fonction de P, L, E et II.
b) Calculer numériquement la flèche (en mm) et les rotations (en°) pour P = 12kN, L=1m; la section est un rectangle 80×40, E = 200 GPa.
Réponses : 16EI
PL•• 48EI
PLfY
2
BAY
3
max =−== °==−== − 0,126rd2.210•• mm0.73f 3BAmax
RÈPONSES N°11
Nous ne pouvons déterminer que le déplacement vertical de la section C.
Ce déplacement correspond à la flèche maximale, car le problème est symétrique en l’abscence de charge horizontale.
Nous désirons connaître la rotation de la section A. Il est donc nécessaire qu’il existe en Aun moment « fictif » porté par l’axe de la rotation cherchée .
Appliquons alors en A un moment « fictif » P2 suivant l’axe Y:
Nous désirons connaître la rotation de la section B. Il est donc nécessaire qu’il existe en B un moment « fictif » porté par l’axe de la rotation cherchée .
YG
Zx
G
Z
A C B
L/2
P
L/2
P
C
L/2L/2
G x
Z Y
A B

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 28
Appliquons alors en B un moment « fictif » P3 suivant l’axe Y , mais compte tenu de la symétrie :•A= -•B. L’approche de P3 n’est donc pas necessaire.
Pour appliquer le théorème de Castigliano, nous devons au préalable calculer l’énergie de déformation élastique dans l’état E0’ .
∑ ∫ +++++=barres Z
Z
Y
Y
G
XZL YXdéf dx
EIM
EIM
GIM
GAT
GAT
EANW )
222222(
2222
0
22
En ne tenant compte que de l’énergie due au moment fléchissant :( )
dxEI
MW
B
AY
EYdéf ∫=
2'0
2
Nous devons donc chercher le moment My. Pour cela, décomposons l’état E0’ en deux états :
P
C
L/2L/2
G x
Z Y
A B
Etat intermédiaire
E0’
Etat initial
E0
E0 • E0’{ P1=P ; P2=0 }
P1
C
L/2L/2
G x
Z Y
A B
P2

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 29
( ) ( ) ( )( ) ( ) ( ) ( ) ( )∫∫∫
++=
+==
B
AY
YYYYB
AY
EYEYB
AY
EYdéf dx
EI
MMMMdx
EIMM
dxEI
MW EEEE
2
2
22212121'0
2222
( ) ( ) ( ) ( ) ( ) dxMMEI
dxMEI
dxMEI
dxEI
MW
B
A
B
A YYY
B
A YY
YY
B
AY
EYdéf EEEE∫ ∫∫∫ ++==
2121
'0 12
12
12
222
Pour calculer Wdéf nous pouvons soit faire le calcul avec l’état E0’, soit avec les états E1 et E2.
Première approche :
Utilisons le tableau des intégrales de Mohr avec l’état E0’.( )
dxEI
MW
B
AY
EYdéf ∫=
2'0
2
( )
++
++
+×+=
24231
2424231
21 2
122
12122
22
LLPPLLPPLPPPPEI
WY
déf
YYYdéf EI
LPPEI
LPEILPW
16696
221
22
321 ++=
Etat intermédiaire
E0’
P1
C
L/2L/2
G x
Z YA B
P2
P1
C
L/2L/2
G x
Z YA B
C
L/2L/2
G x
Z YA B
P2
Etat
E1
E0’ • E1+ E2Etat
E2P2
P1L/4
-
(MY)E1
(MY)E2
(MY)E0’
-
-P2
P2/2+P1L/4
(MY)E0’=(MY)E1+(MY)E2
Wdéf = 1/2EIYL/2
P2
P2/2+P1L/4
-
2
+ 1/2E IYL/2
P2/2+P1L/4
-
2

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 30
Autre approche : à ‘aide des états E1 et E2
( ) ( ) ( ) ( ) dxMMEI
dxMEI
dxMEI
WB
A
B
A YYY
B
A YY
YY
déf EEEE∫ ∫∫ ++=2121
12
12
1 22
×+
+
= LPLP
EILP
EILLP
EIW
YYYdéf 244
1123
12
143
12
1 212
22
1
YYYdéf EI
LPPEI
LPEILPW
16696
221
22
321 ++=
a) Expression littérale de la flèche maximum (en C)
Appliquons le théorème de Castigliano :i
défi P
WD
∂∂
=
La dérivée partielle de l’énergie par rapport à P1 nous donne le déplacement associé à P1.
( ) ( )
YY
défECv
E
EILP
EILP
PW
D1648
21
31
11
'0'0 +=∂
∂==δ
Revenons maintenant au problème initial, sachant que : E0 • E0’{ P1=P ; P2=0 }
( )
Y
ECv EI
LP48
30 =δ
a) Expression littérale des rotations aux extrémités A et B
La dérivée partielle de l’énergie par rapport à P2 nous donne le déplacement associé à P2.
( ) ( )
YY
défEAy
E
EILP
EILP
PW
D163
212
22
'0'0 +=∂
∂==θ
Wdéf = 1/2EIYL
P1L/4 2
+ 1/2E IYL
P2
-2
+ 1/E IYL
P2
--L
P1L/4
- x

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 31
Revenons maintenant au problème initial, sachant que : E0 • E0’{ P1=P ; P2=0 }
( ) ( )00
16
2EB
yY
EAy EI
LPθθ −==
b) Numériquement : P = 12kN, L=1m; la section est un rectangle 80×40, E = 200 GPa.
( ) mmEILP
Y
ECv 73,0
804010.2004812100010.12
48 33
3330 =
×××××
==δ
•vC=fmax=0,73 mm
( ) o126,010.197,2804010.20016
12100010.1216
333
2320 ⇒=
×××××
== − rdEILP
Y
EAyθ
•YA= -•Y
B =0,126°
PROBLÈME N°12
Considérons le système hyperstatique ci-contre. On ne tient compte que du moment fléchissant pour le résoudre.1°) Déterminez les expressions littérales des réactions. Tracer le diagramme des moments fléchissants.2°) Déterminez les expressions littérales de
la flèche du point C et des rotations en C et B.Application numérique : P=12kN, L=1m, E=200GPa, la section est un rectangle de 80mmx37.5mm. Calculez la valeur du déplacement vertical de C (en mm) et les rotations de B et C (en rd).
Réponses :Les réponses sont données dans le repère XYZ.
1°) 3.75kN16
P5B 8.25kN16
P11A ZZ ==== Nm45008PL3MAY ==
Moments fléchissants MY Nm45008PL3M A ==Y -3750Nm
16PL5M C =−=Y
0M =YB
2°) -2.7344mmEI96PL7
Y
3
VC =−=δ rd171910.1EI32
PL 3
Y
2
YC−==θ rd687510.4
EI8PL 3
Y
2
YB−−=−=θ
A C B
L
P
L
Z
Y
Z
xGG

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 32
RÈPONSES N°12
Problème plan (La géométrie est plane ainsi que le chargement) : H=i-3n .
3 degrés de liberté de supprimés en A (Encastrement) . Inconnues :HA ;VA ;MA
1 degré de liberté de supprimé en B (Appui glissant) . Inconnue : VB
Un solide pour appliquer le premier principe de Newton.
H= i-3n = 4-3 = 1 Le système est hyperstatique externe de degré 1 : Hext1°
Le « Mathématicien » ne sait pas résoudre un système ou il existe plus d’inconnues que d’équations, le « Physicien » ne faisant pas mieux , il faut donc chercher des équations de déformations, qui rajoutées à celle de statique permettront de trouver les 4 inconnues.
Notre problème est hyperstatique de degré 1. Nous allons donc choisir une inconnue hyperstatique parmi les 4 (HA ;VA ; VB MA ) afin de traiter un problème isostatique, dont l’hyperstatique ne constituera qu’un cas particulier. Plusieurs choix sont possibles pourl’inconnue hyperstatique, donc plusieurs résolutions possibles. Le chargement de l’isostatique sera celui de l’hyperstatique plus l’inconnue choisie :
P=12kNL=1m
B
b =37,5mm
h =80mm
Z
G x
Y
L=1m
CAHA
VA
MA
VB

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 33
Choix de l’inconnue hyperstatique : MA
Remplaçons l’encastrement en A par un appui simple.
Les 2 états seront équivalents lorsque la rotation de la section A de l’isostatique sera nulle.
Choix de l’inconnue hyperstatique : VB
Supprimons la liaison en B
Les 2 états seront équivalents lorsque le déplacement vertical de la section B de létat isostatique sera nul.
Il nous faut donc calculer des déplacements dans les états isostatiques.
Pour la suite du corrigé , conservons ce dernier choix de l’inconnue hyperstatique (VB), et décomposons l’état isostatique E0’ en 2 états unitaires, afin de calculer D2, à l’aide de Maxwell-Mohr.
P L
B
Z
G x
Y
L
CA
P1L
B
Z
G x
Y
L
C
P2A
Etat isostatiqueE0’
Etat hyperstatiqueE0
E0 • E0’{ P1=P ; D2=0 }
P L
B
Z
G x
Y
L
CA
P1L
B
Z
G x
Y
L
C
P2
A
Etat isostatiqueE0’
Etat hyperstatiqueE0
E0 • E0’{ P1=P ; D2=0 }

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 34
Dans l’état E0’ [ ] [ ] [ ]'0'0'0 EEE PfD =
'0'0'02
1
2221
1211
2
1
EEBv
Cv
E PP
ffff
DD
=
=
δδ
Or dans l’état hyperstatique, le déplacement vertical de B est nul, P2 s’identifie alors avec la valeur de la réaction VB de l’état E0.
22
12122221212 0
fPfPPfPfD B
v −=⇒=+== δ
Calcul des coefficients d’influence dxEI
mmf
C
AY
jYiYij ∫=
)()(à l’aide des intégrales de Mohr :
Calcul de f11 :
( ) LLEI
dxEImf
Y
C
AY
Y ×××== ∫ 22
111 3
11)(YEI
Lf3
3
11 =
Calcul de f22 :
( ) LLEI
dxEI
mfY
B
AY
Y 24311)( 2
22
22 ×××== ∫YEI
Lf38 3
22 =
P1L
B
Z
G x
Y
L
C
P2A
Etat isostatiqueE0’
P1=1L
B
Z
G x
Y
L
CA
L
B
Z
G x
Y
L
C
P2=1
A
Etat unitaire
E1
E0’ • P1×E1+P2×E2
Etat unitaire
E2
(mY)22L
+L
L+(mY)1
f11 = 1/EIyL
L
+
2
f22 = 1/EIy2L
2L
+
2

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 35
Calcul de f12 : dxEI
mmdxEI
mmfB
CY
YYC
AY
YY ∫∫ += 212112
)()()()(
( )( )
+××= LLLL
EIf
Y
22611
12YEI
Lf65 3
12 =
Calcul de la réaction VB :
Y
Y
EIL
PEIL
fPfP
38
65
3
1
3
22
1212 −=−= 12 16
5 PP −=
Compte tenu du choix arbitraire du sens de P2 que nous avons fait, et trouvant P2
négatif, nous en concluons que la réaction verticale en B dans l’état hyperstatique est verticale ascendante. Sa norme étant de 5P/16.
Le problème initial est maintenant isostatique. Pour trouver les 3 inconnues externes restantes HA ;VA ;MA , nous pouvons utiliser les 3 équations de statique, ou calculer sur l’état E0’ en faisant P2=5P/16
HA0 = P×HA
1-(5P/16)×HA2 HA
0 = P×0-(5P/16)×0 = 0VA
0 = P×VA1-(5P/16)×VA
2 VA0 = P×1-(5P/16)×1 = 11P/16
MA0 = P×MA
1-(5P/16)×MA2 MA
0 = P×L-(5P/16)×2L = 3PL/8
Diagramme des moments fléchissants :
Pour trouver le diagramme des moments fléchissants, nous utilisons les résultats obtenus sur l’état isostatique E0’ au lieu de tout refaire le problème initial.
MY (E0) = P×mY (E1)-(5P/16)×mY (E2)
MYA(E0) = P×mY
A(E1)-(5P/16)×mY
A(E2) = P×L-(5P/16)×2L = 3PL/8
MYC(E0) = P×mY
C(E1)-(5P/16)×mY
C(E2) = P×0-(5P/16)×L = -5PL/16
MYB(E0) = P×mY
B(E1)-(5P/16)×mY
B(E2) = P×0-(5P/16)×0 = 0
f12 = 1/EIYL
2LL
+ + 1/EIYxL
x0L
L
+ +L
L
PL
B
Z
G x
Y
L
CA
5P/16
E0 • E0’{ P1=P ; D2=0 } • P1×E1+P2×E2 • P×E1-(5P/16)×E2

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 36
Expressions littérales de la flèche du point C et des rotations en C et B
flèche du point C :
Dans l’état E0’ :'0'0'0
2
13
1
825
251
30 EYEEBv
Cv
PP
EILD
=
=
δδ
Dans l’état E0 :
−
=
165
825
251
3
3
0
PP
EIL
YEBv
Cv
δδ ( )
×−=
165
25
3
30 PP
EIL
Y
ECvδ •v
C=7PL3/96EIY
Le déplacement s’effectue dans le même sens que celui de P1.
Rotations en C et B :
Pour rechercher les rotations des sections C et B il faut qu’il existe en C et B des moments portés par l’axe des rotations cherchées.
Compte tenu des résultats dont nous disposons, il sera plus simple de raisonner à partir de l’état isostatique équivalent E0’ . Cherchons donc, dans un premier temps, les rotations des sections C et B dans l’état isostatique E0’. Rajoutons sur ce dernier 2 couples P3, et P4 en C et D .
P L
B
Z
G x
Y
L
CA
P1=1L
B
Z
G x
Y
L
CA
L
B
Z
G x
Y
L
C
P2=1
A
Etat unitaire
E1
Etat unitaire
E2
Etat initial
P x E1-5P/16 x E2
1
1
L
2L
11P/16
5P/16
3PL/8
L+(mY)1
(mY)22L
+L
3PL/8 (MY)0
5PL/16+ -
Etat0 • P1×Etat1+P2×Etat2 • P×Etat1-(5P/16)×Etat2

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 37
Décomposons l’état E0’ en 4 états unitaires pour appliquer la méthode de Maxwell-Mohr
Dans l’état E0’ :
'0'0'04
3
2
1
44434241
34333231
2423
33
1413
33
4
3
1
38
65
65
30
E
YY
YY
EEBy
Cy
Bv
Cv
PPPP
ffffffff
ffEIL
EIL
ffEIL
EIL
DD
D
=
=
θθδδ
Etat isostatiqueE0’
P1=1L
B
Z
G x
Y
L
CA
B
Z
G x
Y
L
CA
E0’ • P1×E1+P2×E2+ P3×E3+P4×E4
Etat unitaire
E2
(mY)22L
+L
L+(mY)1
P1L
B
Z
G x
Y
L
C
P2A
P3P4
B
Z
G x
Y
L
CA
P3=1
B
Z
G x
Y
L
CA
Etat unitaire
E3
Etat unitaire
E4
Etat unitaire
E1
E0 • E0’{ P1=P ; P2=-5P/16 ; P3=0 ; P4=0 }
P4=1
+
+
1
1
(mY)3
(mY)4
P2=1
L
L
L

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 38
Dans l’état E0 :
'0000
165
38
65
65
3
44434241
34333231
2423
33
1413
33
E
YY
YY
EBy
Cy
Bv
Cv P
P
ffffffff
ffEIL
EIL
ffEIL
EIL
−
=
θθδδ
Nous devons donc calculer seulement les coefficients f31, f32, f41, et f42 .
Calcul de f13 : dxEI
mmdxEI
mmfB
CY
YYC
AY
YY ∫∫ += 313113
)()()()(
×××= LL
EIf
Y
1211
13YEI
Lf2
2
13 =
Calcul de f23 : dxEI
mmdxEI
mmfB
CY
YYC
AY
YY ∫∫ += 323223
)()()()(
( )
+××= LLL
EIf
Y
21211
23YEI
Lf23 2
23 =
Calcul de f14 : dxEI
mmdxEI
mmfB
CY
YYC
AY
YY ∫∫ += 414114
)()()()(
×××= LL
EIf
Y
1211
14YEI
Lf2
2
14 =
F23 = 1/EIYL
2LL
+ + 1/EIYxL
1
+L
xL
L
0+
f13 = 1/EIY + 1/EIYxL
x0L
L
+1
+L
0L
f14 = 1/EIY + 1/EIYxL
x0L
L
+1
+L L
1
+

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 39
Calcul de f24 : dxEI
mmdxEI
mmfB
CY
YYC
AY
YY ∫∫ += 424224
)()()()(
( )
×××++××= LLLLL
EIf
Y
12121
211
24YEI
Lf2
242
=
Dans l’état E0 :
'0000
165
22
23
2
223
38
65
2265
3
4443
22
3433
22
2233
2233
E
YY
YY
YYYY
YYYY
EBy
Cy
Bv
Cv P
P
ffEI
LEIL
ffEIL
EIL
EIL
EIL
EIL
EIL
EIL
EIL
EIL
EIL
−
=
θθδδ
YYY
Cy EI
PLPEIL
EIPL
32165
23
2
222
=−=θ •yC=PL2/32EIY
YYY
By EI
PLPEI
LEI
PL816
522
222
−=−=θ •yB=-PL2/8EIY
Application numérique : P=12kN, L=1m, E=200GPa, la section est un rectangle de 80mmx37.5mm.
Dans le repère XYZ :
3.75kN165 8.25kN
1611
====PBPA ZZ NmPLM AY 4500
83
==
Moments fléchissants MY NmPLM A 45008
3Y == -3750Nm
165
Y =−=PLM C 0YB =M
-2.7344mm967 3
=−=Y
VC EIPL
δ rdEI
PLY
YC3
2
171910.132
−==θ rdEIPL
YYB
32
687510.48
−−=−=θ
F24 = 1/EIYL
2LL
+ + 1/EIYx xL
1
+L
L
+L
1
+

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 40
PROBLÈME N°13
La poutre encastrée AB ci-contre, de section carrée 60×60, est haubanée par un câble AC de diamètre 5 mm. L = 1 m, E = 200 GPa, P = 3 kN. Le système est hyperstatique. Calculez :1°) la tension dans le câble.2°) le déplacement vertical du point A.
Réponses : mm47,1 N2893N VAAC
x == δA
C
B
L
P45°
xG
Z
P=12kNL=1m
L=1m
b =37,5mm
h =80mmC
A
B8,25 kN
3,75 kN
(MY)
3750 Nm
+-
4500 Nm
4500 Nm
A
B
C
Z
G x
Y
2,7344 mm
1,1719.10-3 rd 4,6875.10-3 rd

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 41
RÈPONSES N°13
Deux solides (La barre AB et le cable AC),
3 inconnues en B (encastrement),
2 inconnues en A et en C (articulations) :
H= i-3n = 7-3x2 = 1
Le système est hyperstatique externe de degré 1 : Hext
1°
Le cable AC étant articulé à ses deux extrémités est donc soumis qu’à un effort normal.
Choisissons donc comme inconnue hyperstatique la réaction en C.
Décomposons l’état isostatique E0’ en deux états unitaires E1 et E2.
45°
C
L
P
G x
Z Y
BA
45°
C
L
P
G x
Z Y
BA
Etat isostatiqueE0’
Etat hyperstatiqueE0
E0 • E0’{ P1=P ; D2=0 }
45°
C
L
P1
G x
Z Y
BA
P2

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 42
Dans l’état E0’ [ ] [ ] [ ]'0'0'0 EEE PfD =
'0'0'02
1
2221
1211
2
1
EECAC
Av
E PP
ffff
DD
=
=
δδ
Or dans l’état hyperstatique, le déplacement de C dans la direction de P2 est nul, P2
s’identifie alors avec la valeur de la réaction en C de l’état E0 .
22
12122221212 0
fPfPPfPfD C
AC −=⇒=+== δ
Calcul des coefficients d’influence ∑ ∫ +=barres Y
jYiYL jXiXij dx
EImm
EAnn
f ))()()()(
(0
à l’aide des
intégrales de Mohr :Calcul de f11 :
( ) LLEI
dxEImf AB
B
A ABY
YY
×××== ∫ 22
111 3
11)(ABY
EILf
3
3
11 =
Calcul de f22 :( ) ( )
∫∫ +=C
A ACXB
A ABY dx
EAndx
EImf
Y
22
22
22)()(
××+
×
××= L
EALL
EIf ACAB
Y
21122
311 2
2
22 ACAB EAL
EILf
Y
26
3
22 +=
Etat unitaireE2
45°
C
L
G x
Z Y
BA
P2=1Etat unitaireE1
45°
C
L
P1=1
G x
Z Y
BA
E0’ • P1×E1+P2×E2
(mY)2(mY)1
(nX)2
+
+
-L 2/2
L
1
f11 = 1/EIyAB
L
L
+
2
f22 = 1/EIyAB
L-
2
+1/EAAC
1
+
2L 2/2
L 2

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 43
Calcul de f12 : dxEI
mmfB
A ABYY
Y
∫= 2112
)()(
××−= LLL
EIf AB
Y2
2311
12 ABY
EILf
62 3
12 −=
Calcul de la réaction en C :
ACAB
AB
EAL
EIL
PEI
L
fPfP
Y
Y
26
62
3
1
3
22
1212
+
−
−=−= 1
2
2 261
2 P
ALI
P
AC
ABY+
=
1°) Tension dans le câble.
Nous avons choisi arbitrairement l’inconnue de l’action en C de telle sorte que le cable AC soit tendue. Nous trouvons P2 positif : Le cable est donc en traction.
L’effort normal dans le cable est : P
ALI
N
AC
ABACX
Y
2
261
2
+
=
Application numérique : Section AB carrée 60×60, haubanée par un câble AC de diamètre 5 mm. L = 1 m, E = 200 GPa, P = 3 kN.
NN ACX 289310.3
5100012460261
2 3
22
4=
×××××
+=
π
NXAC=2893 N
2°) Déplacement vertical du point A.
Dans l’état E0’ [ ] [ ] [ ]'0'0'0 EEE PfD =
'0'0'02
1
2221
1211
2
1
EECAC
Av
E PP
ffff
DD
=
=
δδ
Dans l’état E0
=
28933000
0 2221
1211
ffffA
vδ
−=−=+= 2893
223000
32893
623000
328933000
333
1211 ABABABA
vYYY
EIL
EIL
EILffδ
mmAv 473,12893
223000
6010.2003121000
43
3
=
−
×××
=δ •vA=1,47 mm
f12 = 1/EIyAB
L
L
xL
-+L 2/2

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 44
PROBLÈME N°14
La poutre encastrée AB ci-contre a son extrémité libre qui repose en A sur un appui élastique modélisé par un ressort dont la raideur est k. Le système set hyperstatique.En l'absence de la charge répartie, la poutre est rectiligne et le ressort n'est pas sollicité.
On ne tient compte que du moment fléchissant pour résoudre le système.
1°) Déterminez l'expression littérale de la force qui comprime le ressort et en déduire l'expression de la flèche du ressort.2°) Calculez numériquement la force qui comprime le ressort et la flèche du ressort pour k = 0.1, 0.5, 1, 10 N/mm et k → ∞ La barre est à section carrée 10×10, ρ = 7.85 10-6 kg/mm3
(prendre g=10m/s2), L = 1 m, E = 210 GPa.
Réponses :
kF=f )
kLEI31
1(8P3F A
3Y
A
+=
RÈPONSES N°14
Problème plan (La géométrie est plane ainsi que le chargement) : H=i-3n .3 degrés de liberté de supprimés en A (Encastrement) . Inconnues :HB ;VB ;MB
1 degré de liberté imposé en B (Appui élastique) . Inconnue : VA
Un solide pour appliquer le premier principe de Newton.H= i-3n = 4-3 = 1 Le système est hyperstatique externe de degré 1 : Hext
1°
BA
L
poids P
B
xG
Z
k (N/mm) FA (N) f (mm)0.1 0.47 4.71
0.5 1.44 2.88
1 1.93 1.93
10 2.80 0.28
∞ 2.94 0
L
10
10
Poids Pq
G x
ZY
A B

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 45
Choix de l’inconnue hyperstatique : VA
Supprimons la liaison en A
Les 2 états seront équivalents lorsque le déplacement vertical de la section A de létat isostatique sera égal à la flèche •x du ressort.
Décomposons l’état isostatique E0’ en 2 états unitaires, afin de calculer D2=•x (flèche du ressort), à l’aide de Maxwell-Mohr.
Dans l’état E0’ 2221212 PfPfD Av +== δ
Calcul des coefficients d’influence dxEI
mmf
Y
jYiYL
ij ))()(
(0∫= à l’aide des intégrales de Mohr :
L
10
10G x
ZY
A B
P1=1
Etat unitaireE2
Etat unitaireE1
E0’ • P1×E1+P2×E2
L
10
10G x
ZY
A B
P2=1
(mY)2-
L
(mY)1+L2/2
L
10
10
Poids P=qLq
G x
ZY
AB
VB
MB
HBVA
L
10
10G x
ZY
A B
Etat hyperstatiqueE0
Etat isostatiqueE0’E0 • E0’{ P1=P ; D2=•x }
P2
P1=q

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 46
Calcul de f22 :( ) dx
EImf
B
AY
Y∫=2
222
)(
×××= LLEI
fY
222 3
11YEI
Lf3
3
22 =
Calcul de f12 : dxEI
mmfB
AY
YY∫= 2112
)()(
×
××−= LLL
EIf
Y 2411 2
12YEI
Lf8
4
12 −=
Dans l’état E0’ 2221212 PfPfD Av +== δ
YY
Av EI
PLEI
PLD38
23
14
2 +−== δ
Dans l’état E0Y
A
Y
Av EI
FLEI
qL38
34
+−=δ or kfFA −= et qLP =
kF
EIFL
EIqL A
Y
A
Y
−=+−38
34
d’où : )31
1(8
3
3kLEI
PFY
A
+=
)31
1(8
3
3kLEI
PFY
A
+=
Application numérique : La barre est à section carrée 10×10, ρ = 7.85 10-6 kg/mm3 (prendre g=10m/s2), L = 1 m, E = 210 GPa
)
1000121010.21031
1(8
1010.85,7100010103
3
43
6
k
FA
××××
+
×××××=
−
f12 = 1/EIyL
L2/2
xL
-+L
f22 = 1/EIyL
-
2L

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 47
k0,5251
12,94375
+=AF
Pour k=0 :
:
mmEI
PLEI
qLYY
Av 60714,5
1010.2108121010.85,7100010101000
88 43
6334
=××
××××××−=−=−=
−
δ
Pour k= ∞ :
La force FA tend vers 2,94N8
3 == PFA , et la flèche f tend vers 0 :
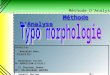
Variation de la force et de la flèche du ressort en fonction de la raideur k
0
1
2
3
4
5
6
0 5 10 15 20k(N/mm)
Forc
e(N
) flè
che(
mm
)
FA (N)
f (mm)
5,6 mm
2,94375 N
k (N/mm)
FA (N) f (mm)
0.1 0.47 4.71
0.5 1.44 2.88
1 1.93 1.93
10 2.80 0.28
∞ 2.94 0
FA
f

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 48
PROBLÈME N°15
Avant d'appliquer la charge répartie, un espace de 12 mm existe entre la poutre et l'appui C. Sachant que l'inertie de flexion vaut 217 106 mm4, calculez (en kN) les réactions sur chaque appui (prendre E = 200 GPa). On ne tient compte que du moment fléchissant.
Réponses : kN100C kN50BA ===
RÈPONSES N°15
Le problème deviendra hyperstatique externe de degré 1 lorsque la flèche verticale de la section C sera égale à 12 mm.
Calculons donc la part de la charge répartie q qui donne une flèche égale à 12mm.
Nous devons donc constituer un état E0’ pour lequel nous rajoutons une force verticale en C
A B
5m
20kN/m
C
5m
12mm
xG
Z
C
5m5m
G x
Z Y
A B
Etat isostatiqueE0’
P1=qP2
E0 • E0’{ P1=q ; P2=0 }
q=20kN/m
C
5m5m
G x
Z Y
A B12mm
Etat initialE0

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 49
Décomposons en deux états unitaires :
Dans l’état E0’ 2221212 PfPfD Cv +== δ
Calcul des coefficients d’influence dxEI
mmf
Y
jYiYL
ij ))()(
(0∫= à l’aide des intégrales de Mohr :
Calcul de f22 :( ) dx
EImf
B
AY
Y∫=2
222
)(
×
××= LL
EIf
Y
2
22 4311
YEILf
48
3
22 =
Calcul de f12 : dxEI
mmfB
AY
YY∫= 2112
)()(
×
××+= LLL
EIf
Y 841251 2
12YEI
Lf384
5 4
12 +=
Dans l’état E0’ 2221212 PfPfD Av +== δ
YY
Av EI
PLEIPLD
483845 2
31
4
2 +== δ
Dans l’état E0 ( )1
44
63
4
4
4105
1210.21710.2003845
384384
5 −=×
×××==⇒= Nmm
LEIq
EIqL A
vY
Y
Av
δδ
Etat unitaireE2
Etat unitaireE1
E0’ • P1×E1+P2×E2 P2=1
(mY)2 L/4(mY)1
-L2/8
C
L/2L/2
G x
Z Y
A B
q
C
L/2L/2
G x
Z Y
A B
P1=1
-
1/2 1/2L/2 L/2
f12 = 1/EIyL
L2/8x
L
L/4--
f22 = 1/EIy
L2
L/4-

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 50
Un chargement réparti de 4N par mm, c'est-à-dire 4kN/m procure une flèche de 12mm/Le chargement total est donc pour 10 m de 40kN. Chaque réaction vaut donc 20kN.
Il subsiste donc une charge répartie de 16 kN supportée par les 3 appuis A, C, et B :
Le système est hyperstatique externe de degré 1. Choisissons comme inconnue hyperstatique, la réaction verticale en C et constituons un système isostatique équivalent :
Compte tenu des résultats obtenus précédemment :
2221212 PfPfD Av +== δ 0
483845 2
31
4
2 =+==YY
Av EI
PLEIPLD δ
85
384485 1
31
4
2LP
LEIEIPLP
Y
Y −=−=
C
5m5m
G x
Z Y
A B
Etat isostatiqueEquivalent si D2=0 P1=q’
q’=16kN/m
C
5m5m
G x
Z Y
A B
Etat hyperstatique
VCVBVA
HA
4kN/m
C
5m5m
B12mm
G x
Z Y
20kN20kN
A
P2

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 51
La réaction verticale en C dans l’hyperstatique vaut donc :
kNLqVC 1008
101658'5
−=××
−=−=
Les deux autres réaction verticales en A et B sont égales (symétrie), et valent en écrivant l’équilibre : VA=VB=-
Nous pouvons maintenant revenir au problème initial en superposant les résultats obtenus respectivement sur l’état isostatique et sur l’hyperstatique.
q=20kN/m (16kN/m+4kN/m)
5m5m
Etat initialE0
100kN (100kN +0kN)
50kN (30kN +20kN) 50kN (30kN +20kN)
C12mmA B
q’=16kN/m
C
5m5m
G x
Z Y
B
100kN
30kN30kN
A

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 52
PROBLÈME N°16
Considérons le cadre fermé ci-contre. Le système est hyperstatique. On ne tient compte que du moment fléchissant pour résoudre le système.
Déterminez le moment de flexion maximum (en Nmm), la contrainte de flexion maximum (en MPa) et l'allongement du cadre (en mm).La section droite du cadre est rectangulaire 8×25. Le matériau est un acier dont le module de YOUNG vaut 210 GPa. La force P vaut 50 N.
Réponses:
mm26.1EI192PL5
MPa9.21 Nmm562516PL3M
II
3
CxxZC
==
±===
δ
σ
RÈPONSES N°16
Le cadre est statiquement déterminé, et en équilibre sous l’action des deux charges P.Par contre il est impossible de déterminer les actions internesdu Torseur de section (ou de Cohésion) compte tenu qu’il est fermé.
En effet nous ne pouvons pas mettre en équilibre un tronçon isolé, puisque nous ne pouvons pas définir un Amont ou un Aval par rapport à une coupure (Le cadre est fermé).
Le problème est plan :TZ=MX=MY=0Les inconnues sont :NX ; TY ; MZ.Le système est Hyperstatique Interne de degré 3, car les inconnues que nous ne pouvons calculer sont les sollicitations du Torseur de Section.
P
L= 600 mm
L/2= 300 mm
P
xG
YA B
C
DE
PP
A B
C
DE
L/2=300mm
L=600mm
Etat hyperstatique
E0
Hint3°
F
G x
Y
Z
G x
Y
Z Nx
TZ
TY
MY
MZ
Mx

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 53
Rendons le système isostatique en y pratiquant un nombre de coupures simples, égal à son degré d’hyperstaticité.Le cadre étant Hint3° faisons une coupure totale dans une section quelconque H (triple : NX ;TY ;MZ)
H devient H’ et H’’Appliquons des sollicitations NX ;TY ;MZ
aux deux lèvres de la coupure, égales et opposées et d’intensité telles que nous refermions exactement la coupure.
0''/' =HHhδ
0''/' =HHvδ
0''/' =HHZθ
Ce sont des déplaçements relatifs
Nous pouvons simplifier la résolution en se souvenant qu’un axe de symétrie nous permet d’abaisser le degré d’hyperstaticité du système.
Faisons intervenir l’axe de symétrie vertical AE en considérant la coupure en A :
A devient A’ et A’’
Appliquons des sollicitations NX ;TY ;MZ
aux deux lèvres de la coupure, égales et opposées.L’effort tranchant TY dans la section A’’est vertical descendant pour respecterle principe d’action mutuelle.Il doit être vertical ascendant pour respecter la condition de symétrie.
La seule valeur possible est donc TY=0Pour refermer exactement la coupure :
0''/' =HHhδ
0''/' =HHZθ
PP
A B
C
DE
Nx
TY
MZ
H’H’’
Etat isostatiqueEquivalent
===
000
''/'
''/'
''/'
HHZ
HHv
HHh
θδδ
Hint3°
F
G x
Y
Z
PP
A’B
C
DE
A’’ Nx
TY=0MZ
Etat isostatiqueEquivalent
==
00
''/'
''/'
AAZ
AAh
θδ
Hint2°
TY=0
TY=0
F
G x
Y
Z

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 54
Faisons intervenir les 2 axes de symétrie (vertical et horizontal) en considérant la coupure en A et en E:
A devient A’ et A’’
E devient E’ et E’’
L’équilibre de l’une ou l’autre des 2 parties, nous permet de trouver la valeur de l’effort normal dans les 2 sectionss : NX=P/2
Pour refermer exactement la coupure :
0''/'''/' == EEZ
AAZ θθ
Nous devons donc calculer la rotation relative deA’ par rapport à A’’ suivant l’axe Z.Lorsque ce déplacement sera nul le moment s’identifiera avec le moment fléchissant dans les
sections A et E.
PP
B
C
D
Etat isostatiqueEquivalent
0''/' =AAZθ
Hint1°
E’E’’ Nx
MZ
A’A’’ Nx
MZ
F
G x
Y
Z
PP
B
C
D
Etat isostatiqueEquivalent
0''/' =AAZθ
E’E’’ MZ
A’A’’
MZ
P/2 P/2
P/2 P/2
MZ
MZ
Hint1°F
G x
Y
Z

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 55
Compte tenu des axes de symétrie, pour calculer ces rotations, nous allons raisonner sur le quart du cadre.
Décomposons l’état isostatique E0’ en 2 états unitaires, afin de calculer D2, à l’aide de Maxwell-Mohr.
Dans l’état E0’ [ ] [ ] [ ]'0'0'0 EEE PfD =
'0'0'02
1
2221
1211''/'
/
2
1
EEAA
Z
FCh
E PP
ffff
DD
=
=
θδ
22
1212222121
''/'2 0
fPfPPfPfD AA
Z −=⇒=+== θ
Calcul des coefficients d’influence ∑ ∫=barres Z
jZiZL
ij dxEI
mmf )
)()((
0à l’aide des intégrales de
Mohr :
P1/2
A’ B
C
L/2=300mm
L/2=300mm
DE
P1/2
P1/2
P1/2
P1/2
P1/2
P1/2 P1/2
P2 P2
P2 P2
E0 • E0’{ P1=P ; D2=0 }
Etat isostatique
E0‘
F
A’’ G x
Y
Z

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 56
Calcul de f22 :( ) ( )
+×= ∫∫ dx
EImdx
EImf
C
BZ
ZB
AZ
Z2
22
222
)()(4
××=2
118 222
LEI
fZ ZEI
Lf 422 =
Calcul de f12 :
+×= ∫∫ dx
EImmdx
EImmf
C
BZ
ZZB
AZ
ZZ 212112
)()()()(4
×××−=
21
4214
12LL
EIf
Z ZEILf
4
2
12 −=
P1/2
A B
C
P1/2
P2
¼ Etat E0’
1/2
A B
C
1/2
Etat E1
A B
C
1
Etat E2
-
1
(mZ)1
L/4
(mZ)2+
+
1
G x
Y
Z
G x
Y
Z
G x
Y
Z
f12 = 4/EIZL/2
L/4
xL/2
1+-
f22 = 4/EIZL/2
21
+ 4/EIZL/2
21
++

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 57
Dans l’état E0’ 222121''/'
2 PfPfD AAZ +== θ
ZZ
AAZ EI
LPEI
PLD 212
''/'2
44
+−== θ
Dans l’état E01616
0 2''/' PLMPLP A
ZAA
Z =⇒=⇒=θ
Pour trouver le diagramme des moments fléchissants, nous utilisons les résultats obtenus sur l’état isostatique E0’ au lieu de tout refaire le problème initial.
MZ (E0) = P×mZ (E1)+(PL/16)×mZ (E2)
MZB(E0) = P×mZ
B(E1)+(PL/16)×mZ
B(E2) = P×0+(PL/16)×1 = PL/16
MZC(E0) = P×mZ
C(E1)+(PL/16)×mZ
C(E2) = P×(-L/4)+(PL/16)×1 = -3PL/16
Le moment fléchissant maximum est de 3PL/16 dans les sections C et F.
mmNPLM CZ 5625
16600503
163
=××
== MZmax= 5,625 mN
La contrainte de flexion maximum vaut :
MPabhPLh
hb
PL
YI
M P
Z
ZPxx 09,21
8258600509
89
212.16
3
223 ±=××
××±=±=
±
−−=−=σ •xx
max= ±21,1 MPa
PP
A B
C
DE
3PL/16
G x
Y
Z
F --
+++
++
+
Diagramme des moments fléchissants MZ
PL/16PL/16
PL/16PL/16
3PL/16

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 58
Allongement du cadre :
Il nous faut donc déterminer le déplacement relatif des sections C par rapport à F horizontalement. Nous allons encore travailler avec l’état E0’.
Dans l’état E0’ [ ] [ ] [ ]'0'0'0 EEE PfD =
'0'0'02
1
2221
1211''/'
/
2
1
EEAA
Z
FCh
E PP
ffff
DD
=
=
θδ
212111/
1 PfPfD FCh +== δ
Dans l’état E0
+=
161211/ PLfPfFC
hδ
Nous devons donc calculer f11.
Calcul de f11 :( ) ( )
+×= ∫∫ dx
EImdx
EImf
C
BZ
ZB
AZ
Z2
12
111
)()(4
×
××=
243114
2
11LL
EIf
Z ZEILf
24
3
11 =
×−=
16424
23/ PL
EILP
EIL
ZZ
FChδ mm
EIPL
Z
FCh 26,1
82510.21019212600505
1925
33
33/ =
××××××
==δ
Allongement du cadre : •hC/F = 1,26 mm
f11 = 4/EIZ
2
L/2
L/4
-

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 59
3. MÉTHODE DES ÉLÉMENTS FINIS
PROBLÈME N°17
Considérons la poutre à section droite variable ci-contre. Le module de YOUNG E vaut 2.105 MPa, L=1 m. La poutre est encastrée à ses deux extrémités et est soumise à une charge axiale P=10kN.La poutre est discrétisée en trois éléments poutre et quatre nœuds. L’aire
A vaut 10 mm2.
1°) Calculez les matrices de rigidité élémentaire des trois éléments sous la forme : [ ]310.4 .
2°) Calculez la matrice de rigidité globale de la structure (sous la forme : [ ]310.4 ).3°) Calculez les déplacements axiaux des nœuds 2 et 3 (en mm), puis les efforts axiaux sur les nœuds 1 et 4 (en kN).4°) Calculez le déplacement axial, la déformation axiale et la contrainte (en MPa) au milieu de l’élément 2.Réponses:
1°) [ ] [ ] [ ]
−
−=
−
−==
1111
10.4k 2222
10.4kk 33321 2°)
[ ]
−−−
−−−
=
11001320
02420022
10.4K 3
3°) kN5.2F kN5.7F mm625.0u mm9375.0u x4x132 −=−===
4°) -125MPa -6.25.10 mm78125.0u -4 === σε
RÈPONSES N°17
La poutre droite à section variable est encasrée à ses deux extrémités. La charge P étant axiale, seules les réactions horizontales existent, et le problème est donc hyperstatique externe de degré 1.
1 P
L/2 L/2
32
2AA
L/2
4 x
1 32

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 60
1) Discrétisons la poutre en 3 éléments et 4 nœuds . Dans notre cas les axes locaux et globaux coïncident. Chaque élément, compte tenu du chargement, n’est soumis qu’à des efforts normaux. Chaque nœud admet un déplacement u suivant x.
La matrice de rigidité élémentaire en traction-compression [ ]
−
−1111
LEA=ek .relie les
efforts d’extrémité de l’élément et les déplacements des nœuds
−
−=
2
1
2
1
1111
uu
LEA
FF
ex
ex
2A
AL/2
L/2
L/23
1
2
32A
x
2
1
2
4
3
P
2A
AL/2
1
x
L/2
L/2
2
3
1
2
3P
4

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 61
Calculons les matrices de rigidité élémentaires.
Elément 1 :
[ ]
−
−1111
2L
E2A=1k
[ ]
−
−××1111
21000
1022.10=5
1k
[ ]2222
10.4 31
−
−=k
−
−=
2
1312
11
2222
10.4uu
FF
x
x
Elément 2 :
[ ]
−
−1111
2L
E2A=2k
[ ]
−
−××1111
21000
1022.10=5
2k
[ ]2222
10.4 32
−
−=k
−
−=
3
2323
22
2222
10.4uu
FF
x
x
Elément 3 :
[ ]
−
−1111
2L
EA=3k
[ ]
−
−×1111
21000
102.10=5
3k
[ ]1111
10.4 33
−
−=k
−
−=
4
3334
33
1111
10.4uu
FF
x
x
L/2
1
1
2A x2
F1x1
F1x2
2AL/2
3
2
x
2
F2x2
F2x3
AL/2
3
x
4
3
F3x3
F3x4

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 62
2) Détermination de la matrice de rigidité K de la structure :
Procédons à l’assemblage des 3 matrices de rigidité élémentaires :
3)
D’où : [ ] [ ][ ]DKP =
Appliquons les conditions limites :
La résolution des équations 2 et 3 du système nous permet de trouver
( )( )
+−=−=
323
323
3210.402410.4
uuuuP
625.09375.0 32 mmummu ==
Ces valeurs reportées dans le système nous permettent de résoudre les équations 1 et 4 :
( ) ( )( ) ( )
−=−=×−=−=
625,010.410.49375,0210.4210.4
33
34
32
31
uFuF
X
X
kNkN 5.2F 5.7F x4x1 −=−=
[ ]2222
10.4 31
−
−=k [ ]
2222
10.4 32
−
−=k [ ]
1111
10.4 33
−
−=k
[ ]
−−−
−−−
=
11001320
02420022
10.4 3K
−−−
−−−
=
4
3
2
1
3
4
3
2
1
11001320
02420022
10.4
uuuu
FFFF
X
X
X
X
−−−
−−−
=
+
0
0
11001320
02420022
10.40 3
23
4
1
uu
F
PF
X
X
L/2xL/2
L/2P=10 kN 2,5 kN
7,5 kN

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 63
4)
Déterminons les efforts d’extrémités de l’élément 2 :
−
−=
3
2323
22
2222
10.4uu
FF
x
x
−
−=
625,0
9375,02222
10.4 323
22
x
x
FF
−
=
×+×−
×−×=
−
−=
2500
2500625,029375,02
625,029375,0210.4
625,09375,0
2222
10.4 3323
22
x
x
FF
L’élément est donc soumis à un effort de compression de 2,5 kN
La contrainte vaut pour tout point:
MPaA
N xxx 125
1022500
−=×
−==σ
La déformation associée vaut :
65 10.625
10.2125 −=
−==
Exx
xxσ
ε
La matrice d’interpolation des déplacements [A] en traction-compression est :
[ ]
−=
LX
LXA 1
[ ][ ]2)( DAxu =
−=
3
21)(uu
LX
LXxu
mmuuLu 78125,0
21
21)
2(
3
2 =
=
2AL/2
3
2
x
2
F2x2
F2x3
2AL/2
3
2
x
2
2500 N
2500 N

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 64
PROBLÈME N°18Avant d'appliquer la charge horizontale P un jeu "j" existe entre l'extrémité droite de la poutre et l'appui de droite. La poutre est modélisée par deux éléments "poutre" et trois nœuds.1°) Déterminer sous forme littérale les matrices de rigidité élémentaires et la matrice de rigidité totale en fonction de L, E et A (mettre 2EA/L en facteur).2°) E=200GPa, A=5cm2, L=1m et P=100kN. Calculer:
a) Le jeu "j" pour que la poutre arrive juste en contact avec la liaison de droite.b) Le jeu "j" pour qu'un l'effort de compression de 10kN s'exerce dans l'élément 2.
Réponses:
[ ] [ ] [ ] mm0,175jmm0,25j110132
022
L2EAK
1111
L2EAk
2222
L2EAk 21 ==
−−−
−=
−
−=
−
−=
RÈPONSES N°18
1°)Discrétisons la poutre en 2 éléments et 3 nœuds . Dans notre cas les axes locaux et globaux coïncident. Chaque élément, compte tenu du chargement, n’est soumis qu’à des efforts normaux. Chaque nœud admet un déplacement u suivant x.
La matrice de rigidité élémentaire en traction-compression [ ]
−
−1111
LEA=ek .relie les
efforts d’extrémité de l’élément et les déplacements des nœuds
−
−=
2
1
2
1
1111
uu
LEA
FF
ex
ex
1 P
L L/2
2
12
3 x
j4A
A
4A
AL/2
1
x
L2
1
2
P
3
j

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 65
Calculons les matrices de rigidité élémentaires.
Elément 1 :
[ ]
−
−1111
LE4A=1k
[ ]
−
−2222
L2EA=1k
−
−=
2
112
11
2222
L2EA
uu
FF
x
x
Elément 2 :
[ ]
−
−1111
2L
EA=2k
[ ]
−
−1111
LA2=2 Ek
−
−=
3
223
22
1111
LA2
uuE
FF
x
x
Détermination de la matrice de rigidité K de la structure :
Procédons à l’assemblage des 2 matrices de rigidité élémentaires :
1°)
D’où : [ ] [ ][ ]DKP =
4
1
xL2
1F1
x1
F1x2
AL/2
x
2
2
3
F2x2
F2x3
[ ]2222
L2EA1
−
−=k [ ]
1111
LA22
−
−=
Ek
[ ]
−−−
−=
110132
022
LA2EK
−−−
−=
3
2
1
3
2
1
110132
022
LA2
uuu
E
FFF
X
X
X

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 66
a) Jeu "j" pour que la poutre arrive juste en contact avec la liaison de droite.
Appliquons les conditions limites :
La résolution des équations 2 et 3 du système nous permet de trouver u2 et u3.
( )
( )
+−=
−=
32
32
LA20
3LA2
uuE
uuEP ( )
=+−
−××
=
0
31000
10.500.102210.100
32
32
233
uu
uu 25.032 mmuu ==
J=0,25 mm
b) Le jeu "j" pour qu'un effort de compression de 10kN s'exerce dans l'élément 2.
Appliquons les conditions limites :
La résolution des équations 2 et 3 du système nous permet de trouver u2 et u3.
( )
( )
+−=−
−=
32
32
LA2
10
3L
A2
uuEP
uuEP
+−=−
−=
32
32
20
32
uuEA
PL
uuEAPL
==
=
mmEAPLu
EAPLu
175,0407
409
3
2
J=0,175 mm
−−−
−=
+
3
2
1 0
110132
022
LA2
0 uuEP
FX
−−−
−=
−
+
3
2
1 0
110132
022
LA2
10uuE
PP
F X

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 67
PROBLÈME N°19
Ce problème est le même que le problème 9 qui a été résolu par la méthode de MAXWELL-MOHR.
Les barres (1) et (2) de même section droite A et de même matériau) sont articulées en 1, 2 et 3. Une force verticale P est appliquée en 2.
1°) Déterminez les matrices de rigidité élémentaire des deux éléments en fonction de E, A et L et dans le repère global X,Y. Écrire ces matrices sous la forme :
[ ] [ ]L
EAk 1 = [ ] [ ]L
EA42k 2 =
2°) Déterminez sous forme littérale la matrice de rigidité de la structure dans le repère global X, Y. Écrire cette matrice sous la forme :
[ ] [ ]L
EAK =
3°) Calculez (en mm) le déplacement horizontal et le déplacement vertical du noeud 2 pour A= 1cm², E= 200 GPa, L= 2m, P= 10kN et la valeur (en kN) des réactions sur les nœuds 1 et 3.4°) Calculez les efforts axiaux dans les éléments 1 et 2.
Réponses : 1°)
[ ]
−
−
=
0000010100000101
LEAk 1 [ ]
−−−−−−
−−
=
111111111111
1111
LEA
42k 2
2°)
[ ]
−−
−−
−−
−−+−
−
=
42
42
42
4200
42
42
42
4200
42
42
42
4200
42
42
42)
421(01
000000000101
LEAK
1
2
X
Y
1
3
2
P
135°
L

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 68
3°) mm83,3umm1u 2Y2X −=−=0F
kN10F
1Y
1X
=
−=
kN10FkN10F
3Y
3X
=
−=
3°)kN142.14N
kN10NBC
x
ABx
=
−=
RÈPONSES N°19
1°) Matrices de rigidité élémentaire des deux éléments en fonction de E, A et L et dans le repère global X,Y.
Le problème est à 2 degrés de liberté, uX suivant X et vY suivant Y ( X,Y étant le repère global )Elément 1 :
Dans les axes locaux xy
[ ]
−
−1111
LEA=/xy
1k
−
−=
2
1
/xy12
11
1111
LEA
x
x
x
x
uu
FF
Dans les axes globaux XY
[ ]
−
−
0000010100000101
LEA=/XY
1k
3
2
P
135°
L
1 X
Y
1
2
2
L
11
F1x1 F1
x2
x
y
X
Y

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 69
Elément 2 :Dans les axes locaux xy
[ ]
−
−1111
2LEA=/xy
2k
−
−=
3
2
/xy23
22
1111
2LEA
x
x
x
x
uu
FF
Dans les axes globaux XYNous devons calculer [λ] la matrice de transformation,car pour l’élément 2, les axes locaux et globaux ne coïncident pas :
[ ]
=
θθθθ
λsincos00
00sincos
[ ]
°°
°°=
135sin135cos0000135sin135cos
λ
[ ]
−
−=
11000011
22
λ
[ ] [ ][ ] [ ] ,2
,2 λλ yx
tYX kk = [ ]
11000011
22
1111
2LEA
1010
0101
22
,2
−
−
−
−
−
−
=YXk
[ ] 11000011
1111
1010
0101
4L2EA
,2
−
−
−
−
−
−
=YXk
[ ] 11000011
111111
11
4L2EA
,2
−
−
−−−
−
=YXk [ ]
−−−−−−
−−
=
111111111111
1111
42
,2
LEAk YX
[ ]
−−
−−
−−
−−
=
42
42
42
42
42
42
42
42
42
42
42
42
42
42
42
42
,2
LEAk YX
F2x3
F2x2
x
y
X
Y
2
3
L 2
2
135°

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 70
2°) Matrice de rigidité de la structure dans le repère global X, Y.
Procédons à l’assemblage des 2 matrices de rigidité élémentaires :
3°) Déplacement horizontal et déplacement vertical du noeud 2 :
[ ] [ ][ ]DKP =
XYY
X
Y
X
Y
X
XYY
X
Y
X
Y
X
vuvuvu
LEA
FFFFFF
/3
3
2
2
1
1
/3
3
2
2
1
1
42
42
42
4200
42
42
42
4200
42
42
42
4200
42
42
42)
421(01
000000000101
−−
−−
−−
−−+−
−
=
Appliquons les conditions limites :
XY
Y
X
XYY
X
Y
X
vu
LEA
FF
FF
/
2
2
/3
3
4
1
1
00
00
42
42
42
4200
42
42
42
4200
42
42
42
4200
42
42
42)
421(01
000000000101
100
−−
−−
−−
−−+−
−
=
−
[ ]
−
−
0000010100000101
LEA=/XY
1k [ ]
−−
−−
−−
−−
=
42
42
42
42
42
42
42
42
42
42
42
42
42
42
42
42
,2
LEAk YX
[ ]
−−
−−
−−
−−+−
−
=
42
42
42
4200
42
42
42
4200
42
42
42
4200
42
42
42)
421(01
000000000101
/ LEAK XY

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 71
La résolution des équations 3 et 4 du système nous permet de trouver uX2 et vY2.
+−=−
−+=
224
22
42
4210
42)
421(0
YX
YX
vuL
EA
vuL
EA
( )
+−×
××=−
−+=
223
34
22
410.2210010.20010
42)
421(0
YX
YX
vu
vu
+−=××××−
−+=
223
34
22
210010.200410.210
42)
421(0
YX
YX
vu
vu
−=−=
mmvmmu
Y
X
828,31
2
2
•H2= -1 mm•V2= -3,83 mm
Réactions sur les nœuds 1 et 3 :
XYXYY
X
Y
X
FF
FF
/
4
/3
3
4
1
1
0083,31
00
42
42
42
4200
42
42
42
4200
42
42
42
4200
42
42
42)
421(01
000000000101
10100
−−
−−
−−
−−
−−+−
−
=
−
La résolution des équations 1, 2, 5 et 6 du système nous permet de trouver les réactions.
+−=
−=
==
−−
−−
−−
−−
−−+−
−
=
−
4283,3
4210
4283,3
4210
010
0083,31
00
42
42
42
4200
42
42
42
4200
42
42
42
4200
42
42
42)
421(01
000000000101
10100
43
43
1
41
/
4
/3
3
4
1
1
Y
X
Y
X
XYXYY
X
Y
X
F
F
FF
FF
FF

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 72
FX1= 10 kN
FY1= 0 kN
FX3= -10 kN
FY3= 10 kN
4°) Efforts axiaux dans les éléments 1 et 2 :
Elément 1 :
Dans les axes locaux xy
[ ]
−
−1111
LEA=/xy
1k
−
−=
2
1
/xy12
11
1111
LEA
x
x
x
x
uu
FF
Les axes locaux et globaux coïncidant :uX1=ux1 et uX2=ux2
−=
−
−
−=
−
−
−=
4
44
/xy12
11
1010
10
1111
011
01111
LEA
x
x
FF
L’effort normal dans l’élément 1 est un effort axial de compression :
kNN x 101 −=
3
2
10 kN
135°
L
1 X
Y
1
2
10 kN
10 kN
10 kN
2
L
11
F1x1 F1
x2
x
y
X
Y
2
L
11
10 kNx
y
10 kN

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 73
Elément 2 :Dans les axes locaux xy
[ ]
−
−1111
2LEA=/xy
2k
−
−=
3
2
/xy23
22
1111
2LEA
x
x
x
x
uu
FF
Les axes locaux et globaux ne coïncident pasil nous faut calculer :
ux2 et ux3
Utilisons la relation : [ ] [ ][ ] YXe
yxe DD ,, λ=
Avec [λ] trouvée précédement :
[ ]
−
−=
11000011
22
λ
−=
−
−
−
−=
−
−=
0828,2
22
00828,31
11000011
22
11000011
22
3
3
2
2
3
2
Y
X
Y
X
x
x
vuvu
uu
D’où :
−
−
−=
−
−
−=
−
−=
0828,2
1111
10.50828,2
22
1111
210
1111
2LEA 3
4
3
2
/xy23
22
x
x
x
x
uu
FF
+−
=
1414014140
/xy23
22
x
x
FF
L’effort normal dans l’élément 1 est un effort axial de traction :
kNN BCx 14,14=
F2x3
F2x2
x
y
X
Y
2
3
L 2
2
135°
x
y
2
3
L 2
2
14,14 kN
14,14 kN

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 74
PROBLÈME N°20
Ce problème est le même que le problème 12 qui a été résolu par la méthode de MAXWELL-MOHR.
P=12kN, L=1m, E=200GPa, la section est un rectangle de 80mmx37.5mm.
1°) Déterminez sous forme numérique (en N/m) la matrice de rigidité de la poutre ci-contre (discrétiser en deux éléments de longueur L et trois nœuds).
2°) En déduire les valeurs numériques de v2 (en mm), de θz2, θz3 (en rd) et des réactions sur les nœuds 1 et 3 (en kN pour les forces, Nm pour les moments). Tracez le diagramme des moments fléchissants sur les éléments 1 et 2.
3°) Calculez la flèche (en mm), la déformation axiale maximum et la contrainte de flexion maximum (en MPa) au milieu de l’élément 2
RÈPONSES N°20
Le problème est hyperstatique externe de degré 1.
1 2 3
LP
L
y
x1 2
y
zG
P=12kNL=1m
B
b =37,5mm
h =80mm
Y
G x
Z
L=1m
CAHA
VA
MA
VB

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 75
1°)
Discrétisons la poutre en 2 éléments et 3 nœuds :
Dans notre cas les axes locaux et globaux coïncident.
Chaque élément, compte tenu du chargement, n’est soumis qu’à un cisaillement de flexion.
Chaque nœud admet un déplacement v suivant Y, et une rotation • suivant Z .
La matrice de rigidité élémentaire en flexion dans le plan XY :
[ ]
−−−−
−−
=
22
22
3
4626612612
2646612612
LLLLLL
LLLLLL
LEIk ze .
Elle relie les efforts d’extrémité de l’élément et les déplacements des nœuds
−−−−
−−
=
2
2
1
1
22
22
3
2
2
1
1
4626612612
2646612612
z
zz
ez
ey
ez
ey
v
v
LLLLLL
LLLLLL
LEI
MFMF
θ
θ
P=12kN L=1m
L=1m
FY3
X
Y
Elément 2Nœud 2
Nœud 3
Nœud 1
Elément 1Z
FY1
MZ1

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 76
Calculons les matrices de rigidité élémentaires.
Elément 1 :
[ ]
−−−−
−−
=
22
22
31
4626612612
2646612612
LLLLLL
LLLLLL
LEIk z
[ ] ( )
−−−−
−−
××=
−−
4626612612
2646612612
1210.8010.5,3710.200
33391k ; [ ]
−−−−
−−
=
4626612612
2646612612
10.2,3 51k
−−−−
−−
=
2
2
1
1
5
12
12
11
11
4626612612
2646612612
10.2,3
z
z
z
y
z
y
v
v
MFMF
θ
θ
Elément 2 :
[ ]
−−−−
−−
=
22
22
32
4626612612
2646612612
LLLLLL
LLLLLL
LEIk z
[ ]
−−−−
−−
=
4626612612
2646612612
10.2,3 52k
−−−−
−−
=
3
3
2
2
5
23
23
22
22
4626612612
2646612612
10.2,3
z
z
z
y
z
y
v
v
MFMF
θ
θ
L=1m
X
Y
Elément 1Z
F1Y1
1
2
M1Z1 F1
Y2
M1Z2
L=1m
X
Y
Elément 2Z
F2Y2
2
3
M2Z2 F2
Y3
M2Z3

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 77
Détermination de la matrice de rigidité K de la structure :
Procédons à l’assemblage des 2 matrices de rigidité élémentaires :
D’où : [ ] [ ][ ]DKP =
2°)Appliquons les conditions limites :
La résolution des équations (3), (4),et (6) permet de trouver les déplacements :
mmv 7344.22 −= 32 10 1719.1 −−=zθ rdz
33 10 6875.4 −+=θ
[ ]
−−−−
−−−−
−−
=
46260061261200
26802661202461200264600612612
102.3 5K
[ ]
−−−−
−−
=
4626612612
2646612612
10.2,3 52k[ ]
−−−−
−−
=
4626612612
2646612612
10.2,3 51k
−−−−
−−−−
−−
=
3
3
2
2
1
1
5
3
3
2
2
1
1
46260061261200
26802661202461200264600612612
102.3
Z
Z
Z
Z
Y
Z
Y
Z
Y
v
v
v
MFMFMF
θ
θ
θ
( )( )( )( )( )( )654321
0
00
46260061261200
26802661202461200264600612612
102.3
0
0
3
2
25
3
1
1
−−−−
−−−−
−−
=
−
Z
Z
Y
Z
Y
v
F
PMF
θ
θ

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 78
La résolution des équations (1), (2),et (5) permet de trouver :
kNFy 25.81 = kNFy 75.33 = NmM z 45001 =
Déterminons les efforts d’extrémités de l’élément 1 :
−−−−
−−
=
2
2
1
1
5
12
12
11
11
4626612612
2646612612
10.2,3
z
z
z
y
z
y
v
v
MFMF
θ
θ
35
12
12
11
11
10
1719,17344,200
4626612612
2646612612
10.2,3 −
−−
−−−−
−−
=
z
y
z
y
MFMF
P=12kN
2
1
3
8,25 kN
3,75 kN
4500 Nm
Z
Y
2,7344 mm
1,1719.10-3 rd
4,6875.10-3 rd x
−−
−−−−
−−−−
−−
=
−
−
−
−
3
3
35
3
1
1
10.6875,40
10.1719,110.7344,2
00
46260061261200
26802661202461200264600612612
102.3
0
012000
Y
Z
Y
F
MF
L=1m
X
Y
Elément 1Z
F1Y1
1
2
M1Z1 F1
Y2
M1Z2

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 79
( ) ( )( )( ) ( )( )
( ) ( )( )( ) ( )( )
−×+−×−=−×−−×=−×+−×−=−×+−×−=
−
−
−
−
3512
3512
3511
3511
101719,147344,2610.2,3101719,167344,21210.2,3101719,127344,2610.2,3101719,167344,21210.2,3
z
y
z
y
MF
MF
=−=
==
mNMNF
mNMNF
z
y
z
y
37508250
45008250
12
12
11
11
Déterminons les efforts d’extrémités de l’élément 2 :
−−−−
−−
=
3
3
2
2
5
23
23
22
22
4626612612
2646612612
10.2,3
z
z
z
y
z
y
v
v
MFMF
θ
θ
35
23
23
22
22
10
6875,401719,17344,2
4626612612
2646612612
10.2,3 −
−−
−−−−
−−
=
z
y
z
y
MFMF
( ) ( ) ( )( )( ) ( ) ( )( )( ) ( ) ( )( )
( ) ( ) ( )( )
×+−×+−×=×−−×−−×−=
×+−×+−×=×+−×+−×=
−
−
−
−
3523
3523
3522
3522
106875,441719,127344,2610.2,3106875,461719,167344,21210.2,3
106875,421719,147344,2610.2,3106875,461719,167344,21210.2,3
z
y
z
y
MFMF
==
−=−=
NmNN
MF
MF
z
y
z
y
0375037503750
23
23
22
22
X
Y
Elément 1Z
F1Y1=8250 N
1
2M1
Z1=4500 mN
F1Y2=-8250 N
M1Z2=3750 mN
(MZ)3750 Nm- +
4500 Nm
X
Y
Elément 2Z
F2Y2
2
3
M2Z2 F2
Y3
M2Z3
L=1m
X
Y
Elément 2Z
F2Y2=-3750 N
2
3
M2Z2=-3750 mN
F2Y3=3750 N
(MZ)
3750 Nm +

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 80
3°)Flèche :
La matrice d’interpolation des déplacements vaut :
[ ]
+−−+−+−= 2
32
3
3
2
2
2
32
3
3
2
2
23 2 231Lx
Lx
Lx
Lx
Lx
Lxx
Lx
LxA [ ][ ]eDAxv =)(
+−−+−+−=
3
3
2
2
2
32
3
3
2
2
2
32
3
3
2
2
23 2 231)(
z
z
v
v
Lx
Lx
Lx
Lx
Lx
Lxx
Lx
Lxxv
θ
θ
Pour 1mLet2
==Lx [ ]
−=
81
21
81
21A
mmmv 1.210.1,210
6875.401719.17344.2
81
21
81
21)
21( 33 ==
+
−−
−= −−
Déformation:
La matrice d’interpolation des déformations vaut :
[ ]
+−−+−+−= 232232
62 126 64 126Lx
LLx
LLx
LLx
LB
D’où :
62 126 64 126
3
3
2
2
232232
+−−+−+−−=
z
zxx v
v
Lx
LLx
LLx
LLx
Ly
θ
θε
Pour : 40mmy1mL 2
±===Lx
[ ] 310
6875.401719.17344.2
1 0 1- 004.0 −
+
−−
±=xxε 410.3466,2 −±=xxε
Contrainte :MPaE xxxx 9.46±== εσ

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 81
4. PROBLEMES DE SYNTHESEPROBLÈME N°21
1ère partie
Considérons la poutre droite ABC hyperstatique ci-dessus. Toutes les liaisons sont des articulations. La section droite de la poutre est constante et son moment d’inertie de flexion est noté YI . Le module de YOUNG du matériau est E. La poutre est soumise à un couple de flexion P1 appliqué en B.
Prenez comme inconnue hyperstatique la réaction en C (une force P2 dirigée vers le haut ↑ ).
La méthode de résolution est au choix celle de CASTIGLIANO, ou celle de MAXWELL-MOHR. Dans les deux méthodes l’énergie de déformation due à l’effort tranchant sera négligée devant l’énergie de déformation due au moment fléchissant. Si vous choisissez la méthode de MAXWELL-MOHR écrivez l’expression littérale de la matrice de flexibilité sous la forme :
[ ] [ ]YEI
1f =
Quelle que soit la méthode choisie, CASTIGLIANO ou MAXWWELL-MOHR :
1°) Indiquez quelles sont, selon-vous, les différences essentielles entre les méthodes de CASTIGLIANO et de MAXWELL-MOHR2°) Déterminez l’expression littérale de l’inconnue hyperstatique P2 en C en fonction de P1 et de L en précisant bien son sens ( ↓↑ ou ). Calculez sa valeur numérique en Newton si P1= 144 Nm et L=1 m.3°) Déterminez l’expression littérale de la rotation en B en fonction de P1, L, E et IY. Calculer sa valeur numérique en radian si la section droite a un moment d’inertie IY= 0.25 cm4 et si E = 200 GPa.
2ème partie
A B
L
P1x
L/2
L
C
L/2
X
Y
Elément 1 Elément 2
Nœud 1 Nœud 2 Nœud 3

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 82
La poutre de la 1ère partie est discrétisée en deux éléments "poutre" et trois nœuds. La longueur L vaut 1m, la section droite de la poutre est constante et son moment d’inertie de flexion Iz vaut 0.25 cm4. Le module de YOUNG E du matériau vaut 200 GPa. La poutre est soumise au couple de flexion C= 144 Nm appliqué sur le nœud 2.Toutes les liaisons sont des articulations.
On donne la matrice de rigidité d’un élément de poutre de longueur L en flexion dans le plan XY :
[ ]
−−−−
−−
=
22
22
3ze
L4L6L2L6L612L612
L2L6L4L6L612L612
LEIk
Attention ! La longueur de l’élément 1 est L/2 !
1°) Calculez numériquement (utilisez les unités SI : le mètre et le Newton) les matrices de rigidité élémentaire des deux éléments dans le repère global X,Y sous la forme :
[ ] [ ]3ze
LEIk =
2°) Calculez numériquement (utilisez les unités SI : le mètre et le Newton) la matrice de rigidité de la structure dans le repère global X,Y sous la forme :
[ ] [ ]3z
LEIK =
3°) Calculez, dans le repère global X,Y les rotations en radian des nœuds 1, 2 et 3 et les réactions en Newton s’exerçant sur les nœuds 1, 2 et 3.
4°) Calculer en mm la flèche de la section droite située au milieu de l’élément 2. Calculez d’abord numériquement la matrice d’interpolation des déplacements [A], puis la flèche.
On donne la matrice d’interpolation des déplacements d’un élément de poutre de longueur L en flexion dans le plan XY :
[ ]
+−−+−+−= 2
32
3
3
2
2
2
32
3
3
2
2
Lx
Lx
Lx2
Lx3
Lx
Lx2x
Lx2
Lx31A
Réponses: 1ère Partie
1°) La méthode de CASTIGLIANO est analytique, celle de MAXWELL-MOHR matricielle.
2°) ↓−=−= N48L3
PP 12

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 83
3°) rd032.0EI9LP
DI
11 ==
2ème partie
1°)
[ ]
−−−−
−−
=
8244242496249642482424962496
500k 1 [ ]
−−−−
−−
=
4626612612
2646612612
500k 2
2°)
−−−−
−−−−−−
−−
=
3Z
2Z
1Z
3Y
2Y
1Y
0
0
0
46260061261200
261218424612181082496004248240024962496
500
0F144F0F
θ
θ
θ
3°)
=
3Z
2Z
1Z
4202124048
5000
1440
θθθ
rd032.0rd016.0
2Z
3Z1Z
=
−==
θ
θθ
−
−
−−−−
−−−−−−
−−
=
−=
−=
=
016.00032.00016.0
0
46260061261200
261218424612181082496004248240024962496
500
048F
144144F
0192F
3Y
2Y
1Y
4°)[ ][ ]eDA)x(v =
[ ]
+−−+−+−= 2
32
3
3
2
2
2
32
3
3
2
2
Lx
Lx
Lx2
Lx3
Lx
Lx2x
Lx2
Lx31A
1mL 2Lx ==
[ ]
−=
81
21
81
21A mm6m006.0
016.00032.00
81
21
81
21)
21(v ==
−
−=

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 84
RÈPONSES N°21
1ère partie
1°) La méthode de CASTIGLIANO est analytique, celle de MAXWELL-MOHR matricielle.
P1
A B
G x
Z Y
C
L/2 L
Etat E0’P2
P1=1
AB
G x
Z Y
C
L/2 L
Etat E1
A B
G x
Z Y
C
L/2 L
Etat E2P2=1
1-(mY)E1
L(mY)E2
-
P1
A B
G x
Z Y
C
L/2 L
Etat E0

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 85
[ ] [ ] [ ]'0'0'0 EEE PfD =
'0'0 2
132
2
1
26
6610 EYE P
PLL
LL
EID
=
ou
YYYdéf EI
LPEI
LPPEI
LPW2612
322
221
21 ++=
2°) ↓−=−= NL
PP 483
12
3°) rdEILPD
I
032.09
11 ==
2ème partie
1°)
[ ]
−−−−
−−
=
8244242496249642482424962496
5001k [ ]
−−−−
−−
=
4626612612
2646612612
5002k
X
Y
Elément 1 Elément 2
Nœud 1
C=144 mN
L/2 L=1m
Nœud 2 Nœud 3
FY2FY1 FY3
•Z1 •Z2 •Z3IZ=0,25cm4IZ=0,25cm4
X
Y
Elément 1 Elément 2
Nœud 1 C
A B C
L/2 L
Nœud 2 Nœud 3

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 86
2°)
−−−−
−−−−−−
−−
=
3Z
2Z
1Z
3Y
2Y
1Y
0
0
0
46260061261200
261218424612181082496004248240024962496
500
0F144F0F
θ
θ
θ
3°)
=
3Z
2Z
1Z
4202124048
5000
1440
θθθ
rd032.0rd016.0
2Z
3Z1Z
=
−==
θ
θθ
−
−
−−−−
−−−−−−
−−
=
−=
−=
=
016.00032.00016.0
0
46260061261200
261218424612181082496004248240024962496
500
048F
144144F
0192F
3Y
2Y
1Y
4°)
[ ][ ]eDA)x(v = avec [ ]
+−−+−+−= 2
32
3
3
2
2
2
32
3
3
2
2
Lx
Lx
Lx2
Lx3
Lx
Lx2x
Lx2
Lx31A
1mL 2Lx == [ ]
−=
81
21
81
21A
mm6m006.0
016.00032.00
81
21
81
21)
21(v ==
−
−=
[ ]2500
4626612612
2646612612
k=
−−−−
−−
[ ]
−−−−
−−
=
82442424962496424824
24962496
5001k
[ ]
−−−−
−−−−−−
−−
=
46260061261200
261218424612181082496004248240024962496
500K

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 87
PROBLÈME N°22
1ère partie
La poutre AB de longueur L et de section rectangulaire (b x h) repose sur deux appuis, comme indiqué sur la figure ci-dessous. Une force 1P est appliquée au milieu de la poutre.On se propose de déterminer l’équation de la déformée de cette poutre en flexion par la méthode de Maxwell-Mohr. (On négligera l’effet de l’effort tranchant devant celui du moment fléchissant).
Pour cela, on applique une force verticale fictive 2P en un point D. La distance AD est variable. Le paramètre correspondant est AD=x (0<x<L/2).
1. Justifier le choix d’introduire cette force fictive afin de déterminer l’équation de la déformée de la poutre.
2. En associant la force 1P à l’état #1 et la force 2P à l’état #2, écrire la relation entre le vecteur des charges, le vecteur des déplacements et la matrice de flexibilité.
3. Calculer les termes de flexibilité nécessaires à la résolution du problème.4. Déterminer l’équation de la déformée de la poutre. 5. En déduire la position et la valeur de la flèche maximale.
2ème partie
La poutre de la 1ère partie est désormais encastrée en A. Une force verticale 1P est
appliquée en son centre (point C). Un couple 2P porté par l’axe I est appliquée à son extrémité (point B).
Données numériques : L = 500 mm E = 210 000 MPab= 20 mm h = 30 mm K = 106 N/m |P2| = 1000 Nm
A
1P
3
II
B I
LII
Ib
h
2P
xD
L/2

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 88
On utilisera la méthode de Castigliano. (On négligera l’effet de l’effort tranchant devant celui du moment fléchissant).
1. Déterminer l’expression littérale de l’énergie de déformation stockée dans la poutre ABC. Puis l’écrire sous la forme
212
22
1def P.P.P.P.w γ+β+α=Dans la suite du problème, on utilisera les variables α, β, γ dans les développements.
2. Calculer (forme littérale et application numérique) la flèche en B et C pour la même poutre dans la configuration suivante
3. Calculer (forme littérale et application numérique) la flèche en B et la réaction en C pour la même poutre dans la configuration suivante
4. Calculer (forme littérale et application numérique) la flèche en B et en C, ainsi que la réaction en C pour la même poutre dans la configuration suivante (le ressort a une raideur K).En dehors de tout chargement, le ressort n’exerce aucune force sur la
C
A
1P
3
II
B
I
L / 2 L / 2II
Ib
h
2P
A01 =P
3
II
B
I
II
Ib
h
2P
A
3
II
B
I
L /2II
Ib
h
2P
C
L /2

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 89
poutre)
Réponses: 1ère partie
2éme partie
RÈPONSES N°22
A
3
II
B
I
L /2II
Ib
h
2P
C
L /2

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 90
ANNEXES

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 91
ANNEXE A1. INTEGRALES DE MOHR
A1.1 DEFINITION:
Les intégrales de MOHR sont des intégrales du type:
I y x y x dxL
1 10 2= ∫ ( ) ( )
ou encore
I y x dxL
2 0
2= ∫ ( )
Les résultats de ces intégrales sont donnés dans une table (voir pages suivantes) pour des combinaisons de diverse fonctions y1(x) et y2(x) linéaires ou du second degré.
A1.2 UTILISATION DE LA TABLE:
1°) Intégrales de type MiMk.Soit à calculer l'intégrale du type I1 du produit des deux fonctions y1 et y2 linéaires données par leur représentation graphique ci-dessous. Les quantités Mi, Mk sont positives.
Mi (y1)
Mk (y2) ......... x
y
0 L
Mi y1(x)
...........
x
y
0 L
Mky2(x)
I y y dx MM LL
i k1 1 20
16
= =∫
Vérification:
ii
1 MxL
M)x(y +−=
xL
M)x(y k2 =

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 92
dx)xLMMx
LMM(xdx
LM)Mx
LM(dx)x(y)x(yI kiL
02
2kikL
0 ii
2L
0 11 ∫∫∫ +−=+−==
2LMM
3LMM
xL2MM
xL3MM
I kikiL
0
2ki32
ki1 +−=
−+−=
6LMMI ki
1 =
2°) Intégrales de type Mi2.
Soit à calculer l'intégrale du type I2 de la fonction linéaire y au carré donnée par sa représentation graphique ci-dessous.
x
y
0 L
M iy(x)
I y dx M LL
i22
0
213
= =∫
Vérification:
xL
M)x(y i1 =
∫∫ ===L
0
2i2iL
02
2 3LMdx)x
LM(dxyI
3°) Cas hors table.
Exemple 1 :
Soit à calculer, à l'aide de la table, l'intégrale du type I1 du produit des deux fonctions y1 et y2 données par leur représentation graphique ci-contre.
x
y
0 L
Mk y2(x)
xy
0
-Miy1(x)
L/2-
+

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 93
Réponses: LMM83dxyyI ki
L
0 211 ∫ −==
Exemple 2 :
Soit à calculer, à l'aide de la table, l'intégrale du type I1 du produit des deux fonctions y1 et y2 données par leur représentation graphique ci-contre.
L
y2
y1
+
+
Mi
MkMk/2

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 94
Réponses: LMM125dxyyI ki
L
0 211 ∫ ==

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 95
A1.3 TABLE D’INTÉGRATION :

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 96

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 97

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 98
ANNEXE A2. MOMENTS FLÉCHISSANTS DANS QUELQUES CAS SIMPLES :
x
MY
L
L+
1N
x
MY
L
-1
-
1Nm
+L
mY
L2/2x
1N/m
x
LL/2-
MY
-L²/8
1N/m
x
MY
L+
1 1Nm
L/2
-
x
MY
L
-L/4
1N
x
MY
-aL
-b/L
a/L
+ 1Nm
x
MY
L
1
+ 1Nm
a
- x
MY
L=a+b
-ab/L
1N
a x
MY
a+b=L
+1
1Nm
a
x
MY
a+b=L+
b1N
Z
xG
+
x
MY
-L/2L
-1/2
1/2
+ 1Nm

TD-2A-S4-F412
IUTB-LYON1-GMP-DDS Page 99