Embed Size (px)
Citation preview

Université de Rennes 1
HABILITATION A DIRIGER DES RECHERCHES
présentée par
Hervé CORMERAIS
Modélisation, analyse et commande des systèmes physiques à commutations basées sur
une approche énergétique
le 23 novembre 2007.
COMPOSITION DE LA COMMISSION D’EXAMEN
Président : Mr Jean-Jacques FUCHS Rapporteurs : Mme Geneviève DAUPHIN-TANGUY Mr Arjan VAN DER SCHAFT Mr Bernhard MASCHKE Examinateurs : Mr Olivier BONNAUD Mr Claude IUNG Mr Hervé GUEGUEN Laboratoire : Automatique des Systèmes Hybrides de SUPELEC
(groupe Automatique & Communication de l’IETR UMR CNRS 6164)

Novembre 2007
2

Habilitation à Diriger des Recherches
3
Table des Matières
Introduction 5
Partie 1 : Parcours et Activités Professionnels 7
Chapitre 1 : Curriculum Vitae 9
1. Présentation du candidat 9 2. Formation 9 3. Evolution professionnelle 9 4. Activités de recherche 9 5. Activités d’enseignement 10
Chapitre 2 : Présentation Détaillée – Parcours et Activités Professionnels 11
1. Curriculum Vitae 11 2. Activités de recherche 12 3. Activités d’enseignement 21
Partie 2 : Bilan des Activités de Recherche 25
Chapitre 1 : Modélisation des Systèmes Physiques à Commutations basées sur une Approche Energétique 27
1. Introduction 27 2. Modélisation de la partie continue 28 3. Les cellules de commutation 36 4. Détermination de l’automate hybride d’un système à commutations 45 5. Conclusion 52
Chapitre 2 : Analyse des Systèmes Physiques à Commutations à l’aide du Formalisme Bond Graph 55
1. Introduction 55 2. Quelques considérations sur la stabilité des systèmes hybrides 56 3. Etude de la stabilité structurelle des systèmes physiques à commutations 59

Novembre 2007
4
Chapitre 3 : Synthèse de Commandes pour les Systèmes Physiques à Commutations 69
1. Généralités sur la commande des systèmes à commutations 69 2. La commande par mode glissant directe 73 3. La commande par passivation 77 4. Conclusion 82
Chapitre 4 : Cas du convertisseur multiniveaux série à n cellules 85
1. Introduction 85 2. Description du système 85 3. Détermination de l’équation d’état générique 86 4. Détermination de la commande par passivation 91 5. Application au convertisseur série à 3 cellules 93 6. Conclusion 99
Chapitre 5 : Perspectives – Nouveaux Axes de Recherche 101
Bibliographie 105

Habilitation à Diriger des Recherches
5
Introduction Embauché à SUPELEC le 1er septembre 1993 en tant qu’ingénieur-enseignant au service automatique du campus de Rennes dirigé par Yves QUENEC’HDU, mes deux premières années furent essentiellement consacrées à des activités d’enseignement comme cela était alors de rigueur. Encadrant de nombreux travaux de laboratoire (TL) et projets dans le cadre de l’option de troisième année CPI (Conduite de Processus Industriels), c’est durant cette période que j’ai découvert les systèmes hybrides et leur problématique ainsi que le formalisme bond graph. Créateur d’un groupe de travail sur les SDH, regroupant des automaticiens issus du continu et de la communauté des Systèmes à Evénements Discrets (SED), Yves QUENEC’HDU ainsi que Jean BUISSON et Hervé GUEGUEN ont su au sein du Service automatique du Campus de Rennes de SUPELEC développer ce nouvel axe de recherche. Débutant une thèse en 1996, mes travaux s’orientèrent vers la modélisation des systèmes dynamiques hybrides s’appuyant sur le formalisme bond graph. Basée sur une représentation idéale des éléments commutant et utilisant les propriétés énergétiques des systèmes physiques, l’objectif fut de développer une méthode générique de modélisation de la partie continue de ces systèmes dans le cadre d’une approche multimodèle. Visant comme domaine d’application privilégiée l’électronique de puissance, ce travail de recherche fut motivé par un contrat avec Schneider-Electric sur la mise en œuvre d’une méthode de modélisation/simulation sous MATLAB-SIMULINK des systèmes à commutations avec comme objectif l’étude du démarrage d’une machine asynchrone. En cette même année 1996, une première réorganisation des activités de recherche du campus de Rennes de SUPELEC aboutit à la création d’Equipes de Recherche en lieu et place des services. Intégré à l’Equipe ASCH (Automatique des Systèmes Continus et Hybrides) dirigée par Jean BUISSON, je poursuivis mes activités autour des systèmes physiques à commutations et soutins ma thèse en 1998. En 2000, une seconde réorganisation conduisit à la création de l’équipe ASH (Automatique des Systèmes Hybrides) résultant de la fusion de l’équipe ASCH avec l’équipe SED (Systèmes à Evénements discrets) dirigée par Hervé GUEGUEN. Cet événement marqua le rapprochement entre des personnes de sensibilités différentes, certaines initialement plus proches des aspects continus et d’autres issues de la communauté discrète. Mais l’axe commun clairement affiché de cette équipe fut et reste à ce jour les systèmes dynamiques hybrides. L’équipe ASH est aujourd’hui dirigée par Hervé GUEGUEN qui succéda à Jean BUISSON en 2005. Outre des recherches portant sur la modélisation complète des systèmes à commutations prenant en compte les aspects continus et événementiels, mes travaux se sont

Novembre 2007
6
essentiellement orientés vers des problèmes d’analyse et de commande à travers entre autres le co-encadrement de trois thèses. Du point de vue de l’analyse, les recherches entreprises dans ce domaine se sont focalisées sur deux thèmes : la caractérisation du comportement des systèmes physiques à commutations et l’étude de la stabilité. Concernant la partie commande, mes recherches se sont orientées vers la commande par mode glissant directement booléenne et la commande par passivation qui utilise quant à elle la notion de modèle moyen. Le point commun à ces deux approches étant qu’elles sont basées sur des considérations énergétiques. Le document qui suit comprend deux parties. La première est consacrée à une présentation détaillée de mon cursus faisant ainsi le bilan de mes activités de recherche et de mes charges d’enseignement. Quant à la partie 2, elle se focalise sur les travaux que j’ai effectués dans le domaine de la modélisation, l’analyse et la commande des systèmes physiques à commutations. Engagé depuis 1996 dans cette thématique, cette partie retrace donc l’évolution de cette recherche et se termine par un tour d’horizon des perspectives et futurs axes de travail envisagés.

Habilitation à Diriger des Recherches
7
PARTIE 1
Parcours et Activités Professionnels

Novembre 2007
8

Habilitation à Diriger des Recherches
9
CHAPITRE 1
Curriculum Vitae 1. Présentation du Candidat Nom : CORMERAIS Prénom : Hervé Date de naissance 18 mai 1969 Fonction : Professeur Adjoint à SUPELEC Etablissement : SUPELEC – Campus de Rennes Equipe : Automatique des Systèmes Hybrides de SUPELEC (groupe
Automatique & Communication de l’IETR UMR CNRS 6164)
2. Formation 1987 Baccalauréat Série C 1987-1989 Diplôme d’Etudes Universitaires Générales à l’Université de Rennes 1
spécialité Mathématiques-Physique 1989-1992 Elève à SUPELEC. Ingénieur SUPELEC en juin 1992 1992-1993 Diplôme d’Etude Approfondie de Physique Théorique à l’Ecole Normale
Supérieure de Paris 1996-1998 Thèse de Doctorat à l’Université de Rennes 1, mention traitement du signal
et communication, soutenue le 27 novembre 1998
3. Evolution Professionnelle Du 01/09/1993 au 31/08/1996 Ingénieur-Enseignant 2nd Classe SUPELEC
Du 01/09/1996 au 31/12/1998 Ingénieur-Enseignant 1ère Classe SUPELEC
Du 01/01/1999 au 31/12/2003 Chef de Travaux 2nd Classe à SUPELEC
Depuis le 01/01/2004 Professeur Adjoint à SUPELEC
4. Activités de Recherche Mes activités de recherche ont pour cadre la modélisation, l’analyse et la commande des systèmes physiques à commutations.
• 1 rédaction de chapitre dans un ouvrage collectif
• 7 publications dans des revues internationales avec comité de lecture + 1 en cours.
• 29 publications dans des congrès internationaux avec comité de lecture et proceedings.
• 6 coopérations industrielles en modélisation-commande des systèmes complexes. (PSA (1), Renault (1), Schneider Electric (2), Sogitec (1), Thomson (1))

Novembre 2007
10
• 4 co-encadrements de thèses commencées respectivement en 2001, 2003, 2005 et 2006. (1 soutenue en 2004, une autre à soutenir en 2007)
• Participation à un jury de thèse
• 5 encadrements de stages
• Activités nationales -Participation à l’AS 192, 2003-2004 : Systèmes Dynamiques Hybrides et
Convertisseurs Statiques -Depuis 2005, Participation au Groupe de Travail sur les Systèmes Dynamiques
Hybrides (GdR MACS, SEE, Club EEA) • Activités internationales Depuis septembre 2004, Membre du Réseau Européen d’Excellence HyCon (Hybrid
Control - IST 511368) 5. Activités d’Enseignement Première et Deuxième année à SUPELEC Cours magistral (18h/an)
• Physique Quantique (18h/an) – responsabilité du cours depuis 2002 Travaux Dirigés (54h/an)
• Physique (18/an)
• Automatique et Signal (18h/an)
• Electronique de Puissance (18h/an) Travaux de Laboratoire (72h/an)
• Automatique et Signal (45h/an)
• Electronique de Puissance (27h/an) Projets
• Encadrements de 3 à 4 projets chaque année depuis 1994 dans le domaine de l’automatique, du signal ou de la physique.
• Depuis 2004, responsable des projets de conception deuxième année Enseignement en troisième année à SUPELEC Certains de ces enseignements sont directement liés à mes activités de recherche. Cours magistral (3h/an)
• Commande des Systèmes Hybrides (3h/an) Travaux dirigés (9h/an)
• Automatique et Signal (6h/an)
• Informatique (3h/an) Travaux de Laboratoire (13,5h/an)
• Automatique et Signal (depuis 2005, 13,5 h/an) avant 2005 (45h/an) Etudes :
• Encadrement d’une à deux études par an depuis 1994 en relation avec le travail de recherche (modélisation, analyse et commande des systèmes à commutations)

Habilitation à Diriger des Recherches
11
CHAPITRE 2
Présentation détaillée – Parcours et Activités Professionnels
1. CURRICULUM VITAE
1.1 Etat Civil Nom : CORMERAIS Prénom : Hervé Date et lieu de naissance : Né le 18 mai 1969 à Sarcelles Nationalité : Française Fonction : Professeur Adjoint à SUPELEC Etablissement : SUPELEC – Campus de Rennes Avenue de la Boulaie – CS 47601 35576 Cesson-Sévigné Cedex Discipline de Recherche Automatique Equipe : Automatique des Systèmes Hybrides de SUPELEC
(groupe Automatique & Communication de l’IETR UMR CNRS 6164)
1.2. Formation 1987 Baccalauréat Série C 1987-1989 Diplôme d’Etudes Universitaires Générales à l’Université de Rennes 1,
spécialité Mathématiques-Physique 1989-1992 Elève à SUPELEC. Ingénieur SUPELEC en juin 1992 1992-1993 Diplôme d’Etude Approfondie de Physique Théorique à l’Ecole Normale
Supérieure de Paris

Novembre 2007
12
1996-1998 Thèse de Doctorat à l’Université de Rennes 1 mention traitement signal et communication soutenue le 27 novembre 1998 Titre : De l’application des bond graphs à causalité variable dans la modélisation multimodèle des systèmes dynamiques hybrides Directeur de Thèse : Yves QUENEC’HDU Jury : Gérard FAUCON (président), Geneviève DAUPHIN-TANGUY, René LEDOEUFF (rapporteurs), Yves QUENEC’HDU, Jean BUISSON, Michel CORRAZA. Mention : Très honorable
1.3. Evolution professionnelle Evolution professionnelle à SUPELEC depuis mon embauche en septembre 1993. Du 01/09/1993 au 31/08/1996 Ingénieur-Enseignant 2nd Classe SUPELEC Du 01/09/1996 au 31/12/1998 Ingénieur-Enseignant 1ère Classe SUPELEC Du 01/01/1999 au 31/12/2003 Chef de Travaux 2nd Classe à SUPELEC Depuis le 01/01/2004 Professeur Adjoint à SUPELEC
2. ACTIVITES DE RECHERCHE
Sont présentées ici mes différentes activités de recherche comprenant :
• la participation à la rédaction d’ouvrages,
• les publications dans des revues,
• la participation à des congrès,
• les relations industrielles,
• l’encadrement de thèses,
• les activités nationales et internationales,
• les encadrements de stages.
2.1. Rédaction d’Ouvrages Participation à la rédaction d’un chapitre dans l’ouvrage “Les Bond Graphs” qui fait partie de la série “SYSTEMES AUTOMATISES” dirigée par Claude FOULARD.

Habilitation à Diriger des Recherches
13
2000. J. Buisson, H. Cormerais, “Systèmes électroniques et électrotechniques, Les Bond Graphs,” Coordination Geneviève Dauphin Tanguy, Traité IC2, Hermes Sciences, Octobre 2000.
2.2. Publications dans des revues internationales à comité de lecture
Sept publications dans des revues internationales avec comité de lecture + 1 publication en cours d’acceptation (pour le Journal of the Franklin Institute). 2007. H. Cormerais, C. Valentin, M. Zainea, M. Magos-Rivera, J. Buisson,
“Modélisation des Systèmes Physiques à Commutations par Approche Energétique: Application à un Convertisseur DC-DC,” Journal Européen des Systèmes Automatisés, à paraître, 2007.
2006. P.Y. Richard, H. Cormerais, and J. Buisson, “A generic design methodology for
sliding mode control of switched systems,” Journal of Nonlinear Analysis, vol. 65, pp. 1751-1772, 2006.
2002. J. Buisson, H. Cormerais, and P.Y. Richard, “Analysis of the bond graph model of
hybrid physical systems with ideal switches,” Journal of Systems and Control Engineering, vol. 216, pp. 47-72, 2002.
2000. J. Buisson, H. Cormerais, and P.Y. Richard, “Using Trees to Build Nonsingular
Bond Graphs from Electric Circuit Graphs,” Journal of the Franklin Institute. Vol 337, N° 5, pp. 543-554, 2000.
2000. Y. Lu, J. Buisson, and H. Cormerais, “Implicit Representation for the Modeling of
Hybrid Dynamical Systems,” Chinese Journal of Aeronautics, Vol. 13, n° 1, pp 45-50, 2000.
1998. J. Buisson, and H. Cormerais, “Descriptor Systems for the Knowledge Modelling
and Simulation of Hybrid Physical Systems,” Journal Européen des systèmes automatisés, Vol. 32, N° 9-10, pp 1047-1072, 1998.
1997. J. Buisson, and H. Cormerais, “Modeling hybrid systems with bond-graph using an
implicit formulation,” The Bond Graph Digest, vol. 1, 1997.

Novembre 2007
14
2.3. Publications dans des congrès internationaux à comité de lecture
Vingt-neuf publications dans des congrès internationaux avec comité de lecture et proceedings. 2007. A. G. Beccuti, G. Papafotiou, M. Morari, S. Almer, H. Fujioka, U. T. Jonsson, C.-
Y. Kao, A. Wernrud, A. Rantzer, M. Bâja, H. Cormerais, and J. Buisson, “Hybrid Control Techniques Applied to the Step-up DC-DC Converter,” presented at 2007 American Control Conference, July - 2007.
2007. M. Bâja, D. Patino, H. Cormerais, P. Riedinger, and J. Buisson, “Hybrid control of
a three-level three-cell dc-dc converter,” presented at 2007 American Control Conference, July - 2007.
2006. M. Zainea, E. Godoy, J. Buisson, H. Cormerais, and H. Guéguen, “The Open-loop
Control for the Start-up of a Double Resonance Converter Using a Hybrid Systems Approach,” presented at IEEE CCA06: Conference on Control Application, Munich (Germany), Proceedings on CD ROM 6 pages, 2006.
2005. M. Zainea, E. Godoy, H. Cormerais, J. Buisson, and H. Guéguen, “A double
resonance generator simulation using a hybrid approach,” presented at 11th European Conference on Power Electronics and Applications, Dresden (Germany), Proceedings on CD ROM 6 pages, 2005.
2005. M. Zainea, J. Buisson, H. Cormerais, H. Guéguen, and E. Godoy, “Automatic
Simulink Model Building for Physical Switching Systems,” presented at 17th IMACS World Congress Scientific Computation, Applied Mathematics and Simulation, Paris (France), Proceedings on CD ROM 6 pages, 2005.
2005. P.Y. Richard, H. Cormerais, C. Morvan, and J. Buisson, “Boolean Sliding Mode
Control of Multilevel Power Converters,” presented at 16th IFAC World Congress, Proceedings on DVD-ROM 6 Pages, Prague, July 2005.
2005. H. Cormerais, P.Y. Richard, C. Morvan, and J. Buisson, “A Generic Passivity
Based Control for Multicellular Serial Converters,” presented at 16th IFAC World Congress, Proceedings on DVD-ROM 6 pages, Prague, July 2005.
2005. J. Buisson, P.Y. Richard, and H. Cormerais, “On the Stabilisation of Switching
Electrical Power Converters,” in HSCC2005 (M. Morari and L. Thiele (Eds.)) pp.184-198, 2005.

Habilitation à Diriger des Recherches
15
2004. C. Morvan, H. Cormerais, P.Y. Richard, and J. Buisson, “Sliding mode control of switching systems with boolean inputs,” presented at IFAC NOLCOS 2004, pp747-752, Stuttgart, Allemagne, 2004.
2004. C. Morvan, H. Cormerais, P.Y. Richard, and J. Buisson, “Extending passivity
based control to DAE systems with boolean inputs,” presented at IFAC NOLCOS 2004, pp375-380, Stuttgart, Allemagne, 2004.
2004. H. Cormerais, P.Y. Richard, C. Morvan, and J. Buisson, “Notion of commutation
cells for the modelling of hybrid systems using ideal switch representation,” presented at IMAACA 2004, pp21-28, Genoa, Italy, 2004.
2004. P.Y. Richard, C. Morvan, H. Cormerais, and J. Buisson, “Continuous versus
discrete approaches in sliding mode control of switching systems with boolean Inputs modelled in bond graph,” presented at IMAACA 2004, pp13-20, Genoa, Italy, 2004.
2004. J. Buisson, H. Cormerais, M. Zainea, H. Guéguen, and E. Godoy, “A formal
approach to compute hybrid automata models for linear physical systems with ideal switches,” presented at 2004 IEEE CACSD, pp. 47-52, Taipei (Taiwan), September 2004.
2003. C. Morvan, H. Cormerais, J. Buisson, and P.Y. Richard, “Deriving asymptotic
stability of linear switching physical systems from analysis of bond-graph observability,” presented at IEE IMACS CESA’ 03, Proceedings on CD-ROM 6 pages, Lille (France), 2003.
2003. C. Morvan, H. Cormerais, J. Buisson, and P.Y. Richard, “Bond graph formalism
and linear complementarity problem for hybrid systems with ideal diodes,” presented at IFAC ADHS03 : Analysis and Design of Hybrid Systems, pp247-252, Saint-Malo (France), 2003.
2003. P.Y. Richard, C. Morvan, J. Buisson, and H. Cormerais, “Sliding mode control of
hybrid systems modeled using bond graph with ideal switches,” presented at ICGBM2003, Vol 35 n°2, pp175-181, Orlando (USA), 2003.
2002. H. Cormerais, J. Buisson, S. Leirens, and P.Y. Richard, “Calcul symbolique de
l'ensemble des équations d'état pour les bond graphs en commutation,” presented at CIFA02 :Conférence Francophone Internationale d'Automatique, pp382-387, Nantes (France), 2002.

Novembre 2007
16
2002. H. Cormerais, J. Buisson, P.Y. Richard, and Y. Pichon, “Optimal torque control of a synchronous machine,” presented at IFAC World Congress B02, Proceedings on CD-ROM 6 pages, Barcelonne, 2002.
2002. P.Y. Richard, J. Buisson, and H. Cormerais, “Analysis of flatness using bond
graphs and bicausality,” presented at IFAC World Congress B02, Proceedings on CD-ROM 6 pages, Barcelonne, 2002.
2001. J. Buisson, H. Cormerais, and P.Y. Richard, “Bond graph modelling of power
converters with switches commutating by pairs,” presented at ICGBM01, Vol 33 n°1, pp179-184, Phoenix, 2001.
2001. J. Buisson, P.Y. Richard, and H. Cormerais, “Formally computing the state
equations for available configurations of bond graphs with switches,” presented at ICGBM 01, Vol 33 n°1, pp211-216, Phoenix, 2001.
2000. J. Buisson, and H. Cormerais, “A Determination of Energetic Statement for Hybrid
Systems Using Ideal Switches,” presented at 16th IMACS World Congress 2000 on Scientific Computation, Applied Mathematics and Simulation, Lausanne, Proceedings on CD-ROM 6 pages ISBN-9522075-0-0, August 2000.
2000. H. Cormerais, and J. Buisson, “A Criteria to Determine the Possible Modes of
Hybrid Systems Using the Bond Graph Formalism,” presented at 16th IMACS World Congress 2000 on Scientific Computation, Applied Mathematics and Simulation, Proceedings on CD-ROM 6 pages ISBN-9522075-0-0, Lausanne, August 2000.
2000. J. Buisson, P.Y. Richard, and H. Cormerais, “Ideal versus non-ideal approaches in
bond graph modeling of switching devices: a comparison based on singular perturbation theory,” presented at ADPM’2000, pp257-264, Dortmund, April 2000.
2000. H. Cormerais, and J. Buisson, “A Determination of the Possible Modes of an
Hybrid System Using the Bond Graph Formalism,” presented at IFAC Symposium on Power Plants & Power Systems Control 2000, pp324-329, Bruxelles, April 2000.
1999. Y. Lu, J. Buisson, and H. Cormerais, “Descriptor Systems for the Modeling of
Hybrid Physical Linear Systems,” presented at IEEE Hong Kong Symposium on Robotics and Control, July 1999.

Habilitation à Diriger des Recherches
17
1998. J. Buisson, and H. Cormerais, “Avoiding Singular Bond Graphs in the Field of Electricity,” presented at CESA'98 IMACS Multiconference, Nabeul-Hammamet, April 1998.
1998. H. Cormerais, and J. Buisson , “Toward a unified modelling of the continuous part
of the Hybrid Dynamical Systems,” presented at ADPM’98, pp241-247, Reims, March 1998.
1996. J. Buisson, H. Cormerais, and Y. Quenec’hdu, “Bond Graphs and the modelling of
the continuous part of hybrid dynamical systems,” presented at Symposium on Modelling, Analysis and Simulation, IEEE –SMC IMACS Multiconference CESA'96, Lille 9-12, pp303-308, July 1996.
2.4. Colloques Nationaux - Diffusion de la connaiss ance Il s’agit ici de quelques publications à caractère national. 2005. M. Zainea, H. Cormerais, J. Buisson, H. Guéguen, and E. Godoy, “Analyse des
commutations dans un système avec des interrupteurs de l'électronique de puissance par une approche automate hybride," presented at JDMACS 2005, Lyon, 2005.
1999. H. Cormerais, H, and J. Buisson, “Le formalisme bond graph et la modélisation
multimodèle des systèmes dynamiques hybrides," RTCLF'99, pp5-6, Metz, Octobre 1999.
1996. Y. Quenec’hdu, Y, J. Buisson, and H. Cormerais, “Les systèmes dynamiques
hybrides : le point de vue continu. Une application à l'électronique de puissance," Journée d'étude Analyse et supervision des systèmes dynamiques hybrides, Lyon 8 Février 1996.
1996. Y. Quenec’hdu, H. Cormerais, and J. Buisson, “L'approche continue appliquée à
l'électronique de puissance," Flux 1996.
2.5. Relations avec le milieu industriel Sont mentionnées ici les collaborations avec des partenaires industriels. Elles concernent essentiellement des problèmes de modélisation et de commande de systèmes complexes. 2003. Convention d’Etude Industrielle, Sogitec, 2002-2003 : “Optimisation de la
commande d’un moteur pas à pas »

Novembre 2007
18
Durée : 3 mois Encadrement : Hervé Cormerais Pierre-Yves Richard 2002. Convention d’Etude Industrielle, PSA, 2001-2002 : “Modélisation du système :
conducteur + direction » Durée : 3 mois
Encadrement : Jean Buisson Hervé Cormerais 2001. Contrat Industriel, Renault, 2001 : “Modélisation/simulation d'une boîte de vitesse,
étude d’un variateur électrique » Durée : 6 mois
Encadrement : Jean Buisson Hervé Cormerais 2000. Convention d’Etude Industrielle, Thomson, 1999-2000 : “Stratégie d’antenne
sectorielle mettant en œuvre la logique floue » Durée : 3 mois Encadrement : Jean Buisson
Hervé Cormerais 1999. Contrat Industriel, Schneider Electric, 1999 : “Modélisation/simulation d'une
machine d'essais de matériaux de contact à came ou à pot électrodynamique à l'aide du formalisme bond graph » Durée : 12 mois Encadrement : Jean Buisson
Hervé Cormerais 1998. Contrat Industriel, Schneider Electric, 1995-1998 : “Etude de la faisabilité de la
mise en œuvre d’une méthode de modélisation/simulation sous MATLAB-SIMULINK : application à la modélisation/simulation d’une machine asynchrone » Durée : 36 mois Encadrement : Jean Buisson
Hervé Cormerais Ce contrat fut étroitement lié à mon travail de thèse et contribua au développement de la méthode de modélisation générique de la partie continue des systèmes physique à commutations.

Habilitation à Diriger des Recherches
19
2.6. Encadrements de thèse Co-encadrement des thèses suivantes : Depuis 2006 Co-encadrement de la thèse de Flavien Somda (en collaboration à l’équipe
Antenne de l’IETR) Date de début de thèse : Octobre 2006
Titre : Développement de stratégies de commande pour un régulateur de vitesse intelligent Directeur de thèse : Jean Buisson 15% Co-directeur : Mohamed Himdi 15% Co-encadrants : Hervé Cormerais 45% Olivier Lafond 25%
Depuis 2005 Co-encadrement de la thèse de Mihai Baja Date de début de thèse : Octobre 2005
Titre : Commande des Systèmes à Commutations par une approche stabilisante Directeur de thèse : Jean Buisson 30% Co-encadrant : Hervé Cormerais 70%
Depuis 2003 Co-encadrement de la thèse de Marius Zainea Date de début de thèse : Octobre 2003
Titre : Application des approches de modélisation, analyse et commande hybrides au domaine de l’électronique de puissance Directeur de thèse : Hervé Guéguen 30% Co-encadrants : Hervé Cormerais 60% Emmanuel Godoy 10%
2001-2004 Co-encadrement de la thèse de Cécile Morvan soutenue le 28 septembre
2004 à l’Université de Rennes 1 mention traitement du signal et communication
Date de début de thèse : Octobre 2001 Titre : Analyse et Commande des Systèmes Physiques à Commutations en Electronique de Puissance Directeur de Thèse : Jean Buisson 40% Co-encadrants : Hervé Cormerais 40% Pierre-Yves Richard 20% Jury : Gérard FAUCON (président), Claude IUNG, Ahmed RAHMANI, (rapporteurs), Jean BUISSON, Hervé CORMERAIS, Jean Paul LE BARON Mention : Très honorable

Novembre 2007
20
2.7. Activités Nationales Au niveau national, j’ai participé aux activités suivantes :
1. Depuis 2005, Participation au Groupe de Travail sur les Systèmes Dynamiques
Hybrides (GdR MACS, SEE, Club EEA) animé par Jamal DAAFOUZ et Hervé GUEGUEN
2. Participation à l’AS 192, 2003-2004 : Systèmes Dynamiques Hybrides et
Convertisseurs Statiques
2.8. Activités Internationales Depuis septembre 2004, je suis membre du Réseau Européen d’Excellence HyCon (Hybrid Control - IST 511368). Sont présentées ci-dessous mes activités au sein d’HyCon dans le cadre de la participation au Workpackage 4a, Energy Management, sous la direction du professeur Manfred MORARI.
• Participation à la rédaction d’un rapport sur la modélisation-simulation des systèmes hybrides
• Participation à la définition de Benchmarks et la mise en œuvre de lois de commande sur des convertisseurs de l’électronique de puissance
• Coordinateur d’un article pour une session invitée au congrès ACC 2007 (American Control Conference) organisée par le professeur Manfred MORARI et participation à l’écriture d’un autre article toujours pour cette même session invitée.
• Collaborations et Rencontres avec les laboratoires internationaux suivants : - Die Eidgenössische Technische Hochschule Zürich (ETH2)
(Suisse) - Kungliga Tekniska högskolan (Royal Institute of Technology of
Stockholm) (KTH) (Suède) - Lunds Tekniska Högskola (LTH) (Norvège) - Institute for Mathematics and Computer Science (University of
Groningen) (Pays-Bas) - Centre de Recherche en Automatique de Nancy (CRAN)
(France)
2.9. Encadrements de Stagiaires Il s’agit de stages de fin d’études pour des étudiants provenant d’Universités étrangères (Université de Stuttgart, Université Polytechnique de Bucarest,....) ou de stages faisant partie intégrante du cursus des élèves-ingénieurs de SUPELEC.

Habilitation à Diriger des Recherches
21
2006 Stage de fin d’études – durée 4 mois Nom de l’étudiant : Adrian Feurdean
Titre : Simulation des Systèmes à Commutations
2001 Stage de 2ème année SUPELEC – durée 2 mois Nom de l’étudiant : Jérémie Tignel
Titre : Commande prédictive d’une machine synchrone à aimants permanents 2001 Stage de 2ème année SUPELEC – durée 2 mois Nom de l’étudiant : Sylvain Leirens
Titre : Modélisation bond graph des systèmes en commutation, application aux systèmes électriques
1998 Stage de fin d’études – durée 3 mois Nom de l’étudiant : Ernst Rudieger
Titre : Etude de la modélisation d’un système dynamique hybride, application à la modélisation simulation d’une machine asynchrone
1997 Stage de fin d’études – durée 3 mois Nom de l’étudiant : Sergio Contaldo
Titre : Modélisation du démarrage d’une machine asynchrone à l’aide du formalisme bond graph
3. ACTIVITES D’ENSEIGNEMENT
La totalité des enseignements que j’assure s’effectue à SUPELEC dans le cadre de la formation initiale dispensée aux élèves-ingénieurs. Elle se répartie sur les trois années que compte le cursus et dans des matières diverses et variées mais qui peuvent néanmoins se répartir en deux grands groupes : les disciplines liées aux techniques de l’ingénieur et les matières rattachées à la physique. Cette diversité dans les matières enseignées s’explique par le fait que, suite à mes études d’ingénieur à SUPELEC, j’ai poursuivi par un DEA de Physique Théorique qui m’a permis d’acquérir les compétences nécessaires pour l’enseignement de la physique.
3.1. Enseignement en première et deuxième années à SUPELEC Cours magistral :
• Physique Quantique (18h/an) depuis 2002

Novembre 2007
22
Responsabilité du cours de Physique Quantique sur le campus de Rennes de SUPELEC et participation à l’équipe pédagogique, liée à ce cours, qui a pour rôle la définition du programme (cours et TDs) Travaux Dirigés :
• Physique Quantique (6h/an) depuis 1995
• Champs et Propagation (6h/an) depuis 1995
• Principes et Composants de l’Electrotechnique (6h/an) depuis 1995
• Principe et Commande des Entraînements Electriques à Vitesse Variable (6h/an) depuis 2004
• Physique des Solides (6h/an) 1995 à 2001 Travaux de Laboratoire :
• Principes et Composants de l’Electrotechnique (27h/an) depuis 1995
• Signaux et Systèmes (27h/an) depuis 2001
• Principe et Commande des Entraînements Electriques à Vitesse Variable (18h/an) Projets : Depuis 1994, j’encadre de nombreux projets, en moyenne quatre par an, consistant en des projets de conception et réalisation. Ci-joint une liste non exhaustive de quelques uns de ces projets :
• Reconnaissance de caractères manuscrits
• Asservissement de position d’un moteur par commande floue
• Optimisation sous contraintes de la commande de systèmes
• Programmation d’estimateurs pour l’analyse de signaux en temps réel
• Analyse et représentations d’orbitales atomiques : application aux liaisons chimiques
• Détection et poursuite de visages dans une séquence vidéo
• Analyse de l’électronique film mince, basse température, grande surface (en collaboration avec O. Bonnaud)
• Mise en œuvre d’un protocole de communication quantique
• L’ordinateur quantique – Intrication et calcul quantique Taches administratives : Depuis 2004, je suis responsable des projets de conception deuxième année pour le campus de Rennes de SUPELEC. Depuis 2007, élu au comité de Campus de SUPELEC.

Habilitation à Diriger des Recherches
23
3.2. Enseignement N+I Cette formation est dispensée à des élèves étrangers (principalement des élèves issus d’universités chinoises) et a pour but une mise à niveau avant de les insérer dans le cursus classique de SUPELEC en milieu de deuxième année. Travaux Dirigés :
• Signaux et Systèmes (6h/an) depuis 2005
• Electrotechnique et Electronique de Puissance (12h/an) depuis 2005
3.3. Enseignement en troisième année à SUPELEC Ces enseignements, dont certains sont directement liés à mes activités de recherche, se sont effectués de septembre 1993 à juin 1995 au sein de l’option de troisième année CPI (Conduite de Processus Industriels) puis à partir de septembre 1995 au sein de l’option ISA (Ingénierie des Systèmes Automatisés). Cours magistral :
• Commande des Systèmes à Commutations (3h/an) depuis 2003 Travaux dirigés :
• Commande des Systèmes à Commutations (3h/an) depuis 2003
• Ingénierie de la connaissance (3h/an) depuis 1995
• Informatique temps-réel et langage C (3h/an) depuis 1995 Travaux de Laboratoire :
• Filtrage de Kalman (13,5 h/an) depuis 1994
• Systèmes Non Linéaires – Asservissement à relais (18h/an) de 1993 à 2005
• Commande Multivariable (22,5h/an) de 1994 à 2001
• Régulation et Conduite numériques (18h/an) de 1994 à 1999
• Robotique (9h/an) de 1994 à 1999
• Reconnaissance d’objets par analyse d’images (13,5h/an) de 1994 à 1998 Etudes : Encadrement d’études à raison d’une à deux par an. Ces études regroupent en moyenne trois élèves et s’effectuent du mois de janvier au mois de mars. Elle peuvent être à vocation industrielle ou plus directement en liaison avec les activités de recherche. Exemples d’études encadrées
• Mise en œuvre d’une commande floue de balais d’essuie glace

Novembre 2007
24
• Mise en œuvre d’un outil formel de simulation des systèmes dynamiques hybrides
• Modélisation-simulation et commande d’une machine asynchrone
• Modélisation et Simulation d’une voiture pour le suivi de trajectoire
• Conception d’un régulateur de vitesse intelligent pour la conduite automobile

Habilitation à Diriger des Recherches
25
PARTIE 2
Bilan des Activités de Recherche -
Modélisation, Analyse et Commande des Systèmes Physiques à Commutations Basées sur une Approche Energétique

Novembre 2007
26
L’une des activités principales de l’équipe d’Automatique des Systèmes Hybrides du Campus de Rennes de SUPELEC (équipe ASH), dont je suis membre, concerne la modélisation, l’analyse et la commande des systèmes physiques à commutations appliquées au cas de l’électronique de puissance et plus particulièrement à celui des convertisseurs statiques, discipline dans laquelle je me suis personnellement impliqué. Le document qui suit constitue une synthèse des recherches que j’ai effectuées dans ce domaine depuis le début de ma thèse.

Habilitation à Diriger des Recherches
27
CHAPITRE 1
Modélisation des Systèmes Physiques à Commutations basées sur une Approche Energétique
1. INTRODUCTION
Le travail présenté ici s’inscrit dans la problématique générale de la modélisation des systèmes physiques basée sur des principes énergétiques. Nous nous intéressons à une classe particulière de systèmes dynamiques à savoir les systèmes physiques incluant des éléments commutant. Ce sont typiquement des transistors, des diodes ou des thyristors pour le domaine électrique, des valves pour le domaine hydraulique ou des événements de type « chocs » pour le domaine mécanique. Suivant l’objectif de l’étude et donc l’approche de modélisation utilisée, ces systèmes physiques peuvent être considérés comme évoluant de manière continue ou discontinue. La caractéristique commune des éléments commutant est qu’ils possèdent des états de fonctionnement bien distincts en général deux (mais parfois plus) et que les transitions entres ces états s’effectuent en des durées nettement inférieures aux autres constantes de temps du système. Dans le cadre des méthodes de modélisation utilisant des principes énergétiques, on peut citer les méthodes utilisant une approche hamiltonienne (Maschke, Van der Schaft, 1995), (Van der Schaft, Maschke, 1995), (Escobar, Van der Schaft, 1999), (Gerritsen, Van der Schaft, 2002) ou celles plus spécifiques utilisant la notion d’interconnexion de ports qui permettent l’obtention d’un modèle structuré du système à commutations sous une représentation unique paramétrée par l’état discret des interrupteurs (Magos, Valentin, 2004), (Valentin, Magos, 2006). D’autres encore utilisent le formalisme bond graph qui initialement développé pour les systèmes continus peut s’étendre au cas des systèmes physiques à commutations (Karnopp, Margolis, 1990), (Strömberg, 1994), (Cellier, Otter, 1995), (Lorenz, Haffaf, 1995). Mon travail de thèse entre 1996 et 1998 s’inscrivit parfaitement dans cette problématique (Cormerais, 1998) puisque l’objectif consistait justement, à l’aide du formalisme bond graph, à élaborer une méthode de modélisation de la partie continue des systèmes physiques à commutations, cette approche devant pouvoir à terme s’intégrer dans des modèles complets de systèmes hybrides, travail qui fait depuis octobre 2003 l’objet d’une thèse que je co-encadre.

Novembre 2007
28
Le présent chapitre est structuré de la manière suivante : on s’intéresse dans un premier temps à la modélisation de la partie continue du système puis une méthode de détermination de l’automate hybride du système physique autonome à commutations est proposée. Il s’agit d’une approche formelle, permettant une démarche systématique de modélisation. Utilisant le formalisme bond graph, elle est basée sur la notion d’interrupteur idéal conduisant à une représentation à topologie variable du système
2. MODELISATION DE LA PARTIE CONTINUE
2.1. Structure générale Le formalisme bond graph consiste en une représentation graphique des systèmes physiques basée sur le transfert d’énergie. Cette approche permet de modéliser les systèmes continus et par extension la partie continue des systèmes dynamiques hybrides. Utilisant les analogies existant entre les différents domaines de la physique, il permet une approche unifiée quel que soit la discipline concernée : électrique, mécanique, hydraulique,…. (Karnopp, Margolis, 1990) Dans une première approche, à topologie invariante, les éléments commutant sont modélisés par des éléments résistifs non linéaires ou des transformateurs modulés. Ceci conduit à la détermination d’une équation d’état unique à paramètres variables. L’inconvénient d’une telle approche est qu’elle induit des problèmes numériques lors des changements abrupts de paramètres (Borutzky, Dauphin-Tanguy, 1995). La seconde approche, à topologie variable, utilise la notion d’interrupteur idéal qui conduit à l’obtention d’une équation d’état pour chaque configuration valide du système (une configuration valide étant une configuration respectant les lois de Kirchhoff généralisées) et la détermination de fonctions de saut permettant la réinitialisation du vecteur d’état. Cette approche évite donc les problèmes numériques lors des changements de configurations. Quant au modèle retenu, plus simple, il permet donc une analyse plus aisée du système et peut toujours être complexifié via l’ajout d’éléments R, L ou C pour aboutir à un modèle plus réaliste de l’élément commutant. Deux solutions peuvent alors être envisagées afin de représenter ces interrupteurs idéaux. La première utilise la notion de jonction contrôlée, ce sont des jonctions 0 ou 1 suivant la topologie du circuit considéré, possédant deux états on et off. Dans l’état on (cas de l’interrupteur passant), la jonction contrôlée se comporte comme une jonction standard tandis que dans l’état off (cas de l’interrupteur bloqué) elle annule tout transfert d’énergie (Mosterman, 1997). La deuxième solution consiste à modéliser l’interrupteur idéal comme une source de tension nulle dans l’état on et comme une source de flux nulle dans l’état off. C’est cette seconde approche qui a été retenue ici.

Habilitation à Diriger des Recherches
29
Dans ce cas, la partie continue de tout système physique (système RLCGT) incluant des interrupteurs peut alors être modélisée par le bond graph générique de la figure 1.1. En plus des champs standards correspondant respectivement aux sources, aux éléments stockant de l’énergie et aux éléments résistifs, un quatrième champ est ajouté correspondant aux interrupteurs (Sw) qui se comportent donc suivant leur état comme des sources d’effort ou de flux nulle, la structure de jonction traduisant quant à elle la topologie du système.
Structure de Jonction
(O,1,MTF,MGY)
I C
Se, Sf
R
Sw
Figure 1.1. Bond graph générique
Le passage du bond graph acausal au bond graph causal dans une configuration donnée, permet la détermination du schéma informationnel suivant (cf. figure 1.2) :
V U
Dout
Din
Tout Tin
Structure de
Jonction (O,1,MTF,MGY)
Sources
Résistances
Interrupteurs
Causalité Intégrale
Causalité Dérivée
Xi
Xd
Zi
Zi
Figure 1.2. Schéma informationnel déduit du bond graph causal Initié durant ma thèse, un travail original a été développé introduisant une autre approche que la procédure SCAP (Karnopp, Margolis, 1990) afin de déterminer un bond graph causal du système. Celle-ci repose sur la notion d’arbre et permet de supprimer les cas pathologiques qui conduisaient dans la procédure SCAP à la présence de boucles causales de gain 1 (Buisson, Cormerais, 2000). La méthode proposée ne présuppose pas de l’état

Novembre 2007
30
des interrupteurs. Utilisant la notion d’arbre, cette approche algorithmique détermine un bond graph causal correspondant à une configuration maximisant le nombre d’éléments en causalité intégrale encore appelé configuration de référence. Si une telle configuration ne peut pas être trouvée, c’est qu’aucune configuration n’est permise pour ce système (aucune configuration ne respecte les lois de Kirchhoff généralisées). Dans la suite, on supposera que pour les systèmes étudiés, il existe toujours au moins une configuration de référence. Dès lors, une approche formelle et générique de la modélisation de la partie continue des systèmes physiques à commutations peut être élaborée (Buisson, Cormerais, 1996), (Cormerais, Buisson, 1998), (Buisson, Cormerais, 2002). Les entrées et les sorties de la structure de jonction sont reliées entre elles via la relation (1.1) qui est appelée forme standard implicite. Cette relation, déterminée pour chaque configuration valide, (ici représentée dans la configuration j) est directement déduite du schéma informationnel de la figure 1.2.
• iX est le vecteur d’état dont les composantes sont les variables p sur les éléments I
et les variables q sur les éléments C en causalité intégrale. dX est le pseudo vecteur
d’état dont les composantes sont les variables p sur les éléments I et les variables q sur les éléments C en causalité dérivée.
• iZ et dZ sont les vecteurs dont les composantes sont les variables de co-énergie
associées respectivement aux vecteursiX et dX .
• Les vecteurs inD et outD représentent respectivement les variables sortantes et
entrantes du champ résistif.
• inT est un vecteur dont les composantes sont les variables de puissance imposées
par les interrupteurs dans une configuration donnée. outT est le vecteur conjugué de
inT .
• U est le vecteur dont les composantes sont les entrées de puissance. V est le vecteur dont les composantes sont les variables de puissance imposées aux sources.
11 13 14 1512
12 24 25
13 33 34 35
24 14 34 44 45
25 15 35 45 55
0 0 0 00 0 0 00 0
0 0 0 0 00 0 0 00 0 0 0
i
d
T in
Ti out
T inT Td
T outT T T
ZZS S S SI SDS I S S
X DS S I S S
TXS S S S I S TS S S S S I U
V
− − − = − − − − − − −
ɺ
ɺ (1.1)
Remarque 1 : Par la suite, si on suppose le système dans la configuration j et si cela s’avère nécessaire afin de lever toute ambigüité, un indice j est ajouté à toutes les sous-

Habilitation à Diriger des Recherches
31
matrices de S et aux différents vecteurs de (1.1) . On désignera donc comme état du
système dans la configuration j le vecteur ( )T
j ij djX X X= .
La forme standard implicite (1.1) possède les propriétés structurelles suivantes :
• les matrices 11S , 33S , 44S et 55S sont anti-symétriques,
• bien qu’établie pour une configuration donnée, les relations issues de (1.1) restent
valables quelle que soit la configuration tant qu’aucune valeur n’est affectée à inT
ou outT .
• Pour une configuration de référence, 24 0S = (une configuration de référence est
une configuration maximisant le nombre d’éléments en causalité intégrale)
Dans la configuration pour laquelle (1.1) a été établie, 0inT = . Dans toute autre
configuration, les éléments de inT correspondant aux interrupteurs qui ont commuté ne
sont plus nuls. Ce sont les éléments leur correspondant dans outT qui sont alors nuls. Ceci
peut se traduire par la relation suivante dans laquelle 'inT et 'outT sont les vecteurs
correspondant aux champs des interrupteurs dans la nouvelle configuration,
in in
out out
T T
T T
′ − Λ Λ = ′ Λ − Λ
I
I (1.2)
Λ SW SWn n×∈ℜ est une matrice diagonale (Swn représente le nombre d’interrupteurs) dont les
éléments non nuls correspondent aux interrupteurs qui ont commuté. Soit k le nombre d’interrupteurs qui ont commuté. Il a été montré (Buisson, Cormerais, 2004) qu’on peut exprimer le vecteur d’état correspondant à toute autre configuration j possible (en abrégé,
config j) ij
jdj
XX
X
=
en fonction du vecteur d’état de la configuration de référence
irr
dr
XX
X
=
comme suit:
1
2
0
0
0
Tj
Tj j r
P
X P X
= I
avec ( )1 2j jP P une matrice de permutation (1.3)
Dans lequel :
• La matrice 1 jP est une matrice de permutation permettant de spécifier quelles sont
les composantes de irX qui restent en causalité intégrale dans la config j exprimée
sous la forme du vecteur ijX

Novembre 2007
32
• La matrice 2 jP est une matrice de permutation permettant de spécifier quelles sont
les composantes de irX qui passent en causalité dérivée dans la config j exprimée
sous la forme du vecteur idjX
• Enfin, dj drX X= traduit le fait que les éléments en causalité dérivée dans la
configuration de référence restent en causalité dérivée dans la config j. L’expression (1.3) suppose que les éléments en causalité dérivée dans la configuration de référence reste en causalité dérivée dans toute autre configuration et que certains éléments en causalité intégrale dans la configuration de référence passent en causalité dérivée dans les autres configurations.
2.2. Détermination des configurations valides
Généralement toutes les configurations (2 Swn ) ne sont pas permises, certaines ne respectant pas les lois de Kirchhoff (elles correspondent à des conflits de causalité à l’étape 1 de la procédure SCAP).
Proposition 1. La relation (1.1) ayant été établie pour une configuration de référence, tout autre configuration est valide si et seulement si :
( )( )14 34 44rank T T TS S S kΓ − − Γ = avec TΓ Γ = Λ (1.4)
où k représente le nombre d’interrupteurs qui ont commuté par rapport à la configuration de référence (Cormerais, Buisson, 2000).
On en déduit alors les résultats suivants :
• Si ( )( )44Trank S kΓ Γ = , les changements de causalité se font seulement sur les
interrupteurs (un nombre pair d’interrupteurs a commuté), le vecteur d’état restant inchangé.
• Si ( )( )44Trank S kΓ Γ < et ( )( )34 44
T Trank S S kΓ Γ = alors la causalité sur les
éléments de stockage ne change pas. L’ordre du système n’est pas modifié.
• Si ( )( )34 44T Trank S S kΓ Γ < et ( )( )14 34 44
T T Trank S S S kΓ Γ = des changements de
causalité se font sur des éléments de stockage (passage en causalité dérivée), des éléments résistifs ou des interrupteurs. L’ordre du système diminue par rapport à la configuration de référence.

Habilitation à Diriger des Recherches
33
2.3. Equation d’état dans une configuration donnée
2.3.1. Représentation sous Forme implicite Dans le cas où les lois constitutives des champs R, L et C sont linéaires, la relation (1.1) permet une détermination analytique de l’équation d’état sous une forme implicite (Buisson, Cormerais, 2002). La troisième ligne de l’équation (1.1) permet de résoudre la boucle algébrique due au couplage entre les éléments résistifs. Ce cas apparaît quand
33 0S ≠ . Soient les lois constitutive du champ R et du champ de stockage définies par :
, i i iin out T
d d d
Z F F XD LD
Z F F X
= =
(1.5)
Si ( ) 1
33H L I S L−= − existe (ce qui est le cas quand L est une matrice symétrique définie
positive), alors, la troisième ligne de (1.1) donne :
( )13 34 35T
i i iD H S Z S T S U= − + + (1.6)
Si on suppose que le système est dans une configuration donnée : 0inT = . L’élimination
de inD et outD dans les deux premières lignes de (1.1) conduit à la forme d’état implicite
suivante (avec : 11 13 13TK S S HS= − )
:
15 13 3512
12 12 250 0i ii
T T Ti d dd
K F K F X S S H SI S XU
S F F S F F X SX
+ − = + − − − −
ɺ
ɺ (1.7)
Dans la suite, on notera i
d
XX
X =
2.3.2. Représentation sous forme explicite Si dans une configuration donnée, le système possède des éléments de stockage en causalité dérivée alors, par le formalisme bond graph, on aboutit naturellement à une équation d’état sous forme implicite (cf. relation (1.7)). Mais une forme explicite
équivalente, dont le nouvel état est 1
2
X
X
, peut toujours être déterminée via l’application
du changement de variables suivant :
1
2
i
d
XXQ
XX
=
(1.8)
où

Novembre 2007
34
( )12
12
0
0 T Ti
II SQ
R S F F II
= − +
(1.9)
Avec ( ) 1
12121212
−+++= d
TTi
T FFSSFSFSR
Tous calculs faits, on aboutit à l’équation d’état explicite suivante :
( ) ( )( )( )( )
1 12 12 1
15 13 35 12 25
T Ti i i
i
X K F K F F S R S F F X
S S H S K F F S R S U
= − + +
+ + + +
ɺ (1.10)
où l’état 1X est continu à l’origine, associé à l’équation algébrique:
2 25X R S U= (1.11)
2.4. Le phénomène de commutation
2.4.1. Discontinuités des variables d’état Lors d’un phénomène de commutation (changement de configuration du système) considéré comme idéal, i.e. qu’il s’effectue en une durée nulle, les variables d’état dans le
cas le plus général peuvent être discontinues (X X+ −≠ ). Il en résulte alors que certaines variables peuvent être impulsionnelles (Lorenz, Haffaf, 1993), (Buisson, Cormerais,
1996), (Mosterman, 1997), (Cormerais, Buisson, 1998). Il s’agit des composantes de outT
définies dans la configuration après la commutation : ce seront donc des efforts sur les interrupteurs ouverts après la commutation, et des flux sur les interrupteurs fermés après la commutation. Aucune autre grandeur ne peut être impulsionnelle à la commutation. En effet, par hypothèse les sources sont considérées comme des grandeurs continues. Quant
aux composantes des vecteurs iZ , dZ , inD et outD , elles ne peuvent être impulsionnelles
car le système étudié étant isolé et constitué de sources à valeurs finies, il s’ensuit que
l’énergie stockée ou dissipée à la commutation doit restée finie. Enfin, le vecteur inT dans
la configuration après la commutation est nul et non impulsionnel à la commutation. En
définitive, à l’instant de commutation ( ct t= ), on a
( )out cT T t tδ= − (1.12)
où T est un vecteur de même dimension que outT et δ la « fonction » de Dirac.
Déterminons maintenant de manière formelle la discontinuité sur l’état lors d’un
changement de configuration du système. Soit ct , l’instant de commutation. Sont
désignées par in indice (+) les valeurs des grandeurs à l’instant ct+ et par un indice (-) les
valeurs des grandeurs à l’instant ct− .

Habilitation à Diriger des Recherches
35
Plaçons-nous dans la configuration après la commutation. L’intégration à l’instant de
commutation de la première ligne de (1.1) et l’écriture de la deuxième ligne à l’instant ct+
permet d’écrire que :
( )12i i d dX X S X X+ − + −= + − (1.13)
12 25T
d iZ S Z S U+ += − + ( 0inT + = ) (1.14)
En utilisant la relation constitutive (1.5) sur les éléments de stockage d’énergie et en insérant (1.12) dans (1.13), on obtient que :
( ) ( )( )12 12 25.T Td i d iX R S F F S X X S U+ − −= + − + (1.15)
2.4.2. Amplitude des impulsions à la commutation Afin de déterminer l’amplitude T des impulsions utilisons toujours la forme standard implicite (1.1) définie pour la configuration après la commutation. L’intégration de la quatrième ligne de l’expression (1.1) à l’instant de commutation fournit directement la valeur de l’amplitude de l’impulsion, soit :
( )24T
d dT S X X+ −= − − (1.16)
2.4.3. Transfert d’énergie à la commutation Puisque certaines variables peuvent être discontinues ou impulsionnelles à la commutation, de l’énergie est transférée instantanément entre les sources, les éléments de stockage et les interrupteurs (Buisson, Cormerais, 2000). Effectuons le bilan énergétique à la commutation :
• Au niveau des éléments de stockage d’énergie :
Par définition, la puissance dans les éléments de stockage d’énergie s’écrit TZ Xɺ .
L’intégration à l’instant de commutation de cette grandeur fournit l’énergie notée 1E qui
s’écrit :
( )1
1
2T TE Z X Z X+ + − −= − (1.17)
En insérant (1.13) dans (1.17) on en déduit que :
( )( )1 12 25
1
2T T T T
i d d dE Z S Z U S X X− − + −= + + − (1.18)
• Au niveau des éléments commutant :
Par définition, la puissance dans les éléments commutant s’écrit Tin outT T . Comme outT est
impulsionnel à la commutation ( ( )out cT T t tδ= − ), et puisque 0inT + = , on obtient en
utilisant la relation (1.16) que :

Novembre 2007
36
( ) ( ) ( )2 24
1 1 1
2 2 2
TT TT
in in in in d dE T T T T T S T X X+ − − − + −= + = = − − (1.19)
La ligne 2 de la relation (1.1) dans la configuration avant la commutation permet d’écrire :
24 12 25T
in i dS T S Z Z S U− − −= + − (1.20)
Par insertion de (1.20) dans (1.19), on en déduit alors que :
( ) ( )( ) ( )
2 12 25
12 25 12 25
1
21
02
TTi d d d
TT Ti d i d
E S Z Z S U X X
S Z Z S U R S Z Z S U
− − + −
− − − −
= − + − −
= + − + − ≥ (1.21)
• Au niveau des sources :
Par définition, la puissance dans les sources s’écrit TV U . L’intégration de la 5ème ligne de
(1.1) à l’instant de commutation permet de mettre en évidence qu’à cet instant V peut être impulsionnel et sa composante impulsionnelle s’écrit alors :
( ) ( )25T
d d cV S X X t tδ+ −= − − (1.22)
U étant continu, l’énergie fournie par les sources s’écrit :
( )3 25
T
d dE X X S U+ −= − (1.23)
Au vu des conventions adoptées figures 1.1, 1E correspond bien à une énergie fournie et
les grandeurs 2E , 3E à des énergies dissipées.
Le bilan d’énergie est donc vérifié puisqu’on a bien :
1 2 3E E E+ = (1.24)
3. LES CELLULES DE COMMUTATION
3.1. Introduction La notion de cellule de commutation associée au formalisme bond graph permet dans le cas d’une modélisation basée sur une représentation idéale des interrupteurs d’obtenir un modèle équivalent à causalité invariante. Initialement développé par B. Allard dans le cas où les changements de causalité ne surviennent qu’au niveau des interrupteurs (Allard, Morel, 1997), cette notion est ici étendue au cas où des changements de causalité peuvent aussi survenir au niveau des éléments résistifs du système. De plus, puisque l’approche originale développée dans cette partie permet une détermination des cellules de

Habilitation à Diriger des Recherches
37
commutation sans que celles-ci ne contiennent d’éléments de stockage d’énergie (elles sont uniquement composées de jonctions 0 ou 1, de transformateurs et de gyrateurs) et que l’ordre du système ainsi que les composantes du vecteur d’état restent inchangées quel que soit la configuration considérée (les changements de causalité n’affectent pas les éléments de stockage du système), la détermination d’une équation d’état unique s’avère très simple, la méthode requise ne nécessitant pas la connaissance de l’évolution du vecteur d’état (Cormerais, Richard, 2004).
3.2. La Cellule de Commutation élémentaire Commençons par définir la notion de cellule de commutation élémentaire du point de vue du formalisme bond graph.
inS
outS
R
I, C
Source
Structure de
Jonction
inD
Cellule de Commutation
inT
outT Structure de
Jonction Sw
R
outD
Figure 1.3. La Notion de Cellule de Commutation
Définition 1.
Considérant toutes les configurations valides pour le système, on appelle cellule de commutation élémentaire, un ensemble de chemins causaux de type 1, 2 ou 3 connexe dans leur ensemble.
Sont rappelées ci-après les définitions des différents types de chemins causaux ainsi que la notion de connexité.

Novembre 2007
38
• Chemin causal de type 1 : considérant toutes les configurations valides pour le système, un chemin causal de type 1 est un chemin causal entre deux interrupteurs dont la causalité change au moins une fois lors de l’évolution du système.
• Chemin causal de type 2 : considérant toutes les configurations valides pour le système, un chemin causal de type 2 est un chemin causal entre deux composants résistifs dont la causalité change au moins une fois lors de l’évolution du système.
• Chemin causal de type 3 : considérant toutes les configurations valides pour le système, un chemin causal de type 3 est un chemin causal entre un interrupteur et un composant résistif dont la causalité change au moins une fois lors de l’évolution du système.
• Définition de la connexité : deux chemins causaux sont dits connexes si et seulement si ils ont au moins un lien en commun.
Pour une cellule de commutation élémentaire (cf. figure 1.3), les liens d’entrées/sorties sont les liens adjacents aux jonctions 0 ou 1 de ladite cellule mais qui n’appartiennent pas à la cellule. Ainsi, la causalité des liens d’entrées/sorties d’une cellule de commutation élémentaire est indépendante de la configuration et donc invariante. Les variables d’efforts/flux associées à ces liens définissent alors les vecteurs d’entrées et de sorties
respectivement désignés par inS et outS .
3.3. Détermination de la relation d’entrées/sorties d’une cellule de commutation
3.3.1. Cas Général Considérons une cellule de commutation possédant n configurations. La relation d’entrée/sorties pour la ième configuration s’écrit alors simplement :
out i inS M S= (1.25)
En généralisant, la relation d’entrée/sorties valable pour toutes les configurations de ladite cellule peut donc s’écrire sous la forme suivante :
out i i ini
S M Sρ = ∑ (1.26)
dans lequel 1iρ = si la cellule de commutation est dans la ième configuration, 0 sinon.
Afin de déterminer la relation (1.26), deux méthodes peuvent être envisagées.

Habilitation à Diriger des Recherches
39
• La première consiste tout simplement à déterminer pour chaque configuration le bond graph causal et d’en déduire la relation d’entrées/sorties correspondante. On
détermine ainsi toutes les matrices iM et donc i ii
Mρ ∑ . Cette méthode est
bien sur à éviter car elle s’avère très laborieuse dès que le nombre de configurations devient élevé.
• L’autre solution consiste, à partir de la connaissance d’une seule relation
d’entrées/sorties dans une des configurations, à déduire directement la matrice
i ii
Mρ ∑ . Cette méthode que nous allons exposer est basée sur la notion de
matrice de passage déjà utilisée dans (Buisson, Richard, 2001). Considérons donc comme connue la relation d’entrées/sorties dans une quelconque des configurations valides du système (appelons la config 0). On a donc :
0out inS M S= (1.27)
Conformément à la figure 1.3, la cellule de commutation constitue en elle-même un sous-système et considérant les liens d’entrées/sorties de la cellule, on peut donc lui appliquer les principes généraux énoncées au §2.1 et en déduire dans la config 0, une forme standard implicite qui s’écrit comme suit :
0
33 34
34 44
out inT
out inT T
out in
S M A B S
D A Sc Sc D
T B Sc Sc T
= − − −
(1.28)
Considérons maintenant une autre configuration (appelons la config i) . La commutation entre la config 0 et la config i est complètement caractérisée par les deux relations suivantes :
I '
I 'in i i in
out i i out
T T
T T
− Λ Λ = Λ − Λ
(1.29)
I '
I 'in i i in
out i i out
D D
D D
− ∆ ∆ = ∆ − ∆
(1.30)
avec 'inT et 'outT , les vecteurs d’entrées/sorties dans la config i relatifs aux éléments
commutant et 'inD and 'outD , les vecteurs d’entrées/sorties dans la config i relatifs aux
résistances. Quant à iΛ et i∆ , ce sont des matrices diagonales dont les éléments égaux à
1 correspondent respectivement aux éléments commutant et aux résistances qui ont changé de causalité par rapport à la config 0 (Buisson, Cormerais, 1998). Si dans la config 0, la relation constitutive entre les éléments résistifs de la cellule de
commutation s’écrit 0in outD L D= , on trouve alors que dans la config i, elle devient :

Novembre 2007
40
( ) ( )( )1
0 0' 'in i i i i out
i
D I L L I D
L
−= − ∆ − ∆ − ∆ − ∆
(1.31)
Remarque 2. L’existence de la matrice iL est assurée puisque la config i est une
configuration valide pour le système n’impliquant donc aucun conflit causal ou boucle causale de gain 1. En insérant les relations (1.29) et (1.30) dans (1.28), on obtient :
( ) ( )( ) ( )
( ) ( )
34
34
0
33 34
34 44
I
0 '
0 '
I I
I I '
I I '
i i out
i outT
i out
i i inT
i i i inT T
i i i in
A B S
Sc D
S T
M A B S
A Sc Sc D
B Sc Sc T
− ∆ − Λ Ω − Λ = − ∆ Σ
− ∆ − Λ − − ∆ − ∆ − Λ
− − ∆ − Λ − Λ
(1.32)
avec :
33i i iI ScΩ = − ∆ − ∆ (1.33)
44i i iI ScΣ = − Λ − Λ (1.34)
De (1.32), en utilisant la relation constitutive (1.31) et sachant que ' 0inT = dans la config
i, on en déduit les relations suivantes :
( )( ) 0' 'out i i i out i out inS A A I L D B T M S= ∆ + − ∆ + Λ + (1.35)
( )( )( )
33 34
34 34
I '
'
Ti i i i i out
inTT Touti i i i
Sc L Sc D AS
T BSc Sc I L
Q
Ω − − ∆ − ∆ − Λ = − − ∆ − − ∆ Σ
(1.36)
Comme mentionné précédemment pour iL , l’existence des matrices 1i−Ω , 1
i−Σ et 1Q− est
assurée puisque par définition la nouvelle configuration résultant de la commutation d’un ou plusieurs interrupteurs du système n’entraîne aucun conflit causal ou boucle causale de
gain unitaire. Considérons alors la décomposition suivante pour 1Q−
1 rr rt
tr tt
V VQ
V V−
=
(1.37)
où :
• r est le nombre d’éléments résistifs appartenant à la cellule de commutation
• t est le nombre d’éléments commutant appartenant à la cellule de commutation

Habilitation à Diriger des Recherches
41
En insérant les relations (1.36) et (1.37) dans (1.35), on exprime la relation d’entrées/sorties de la cellule de commutation dans la config i :
( )( )( )( ) 0
T Ti i i rr rt
out inT Ti tr tt
i
A A I L V A V BS S
B V A V B M
M
∆ − − ∆ + + = − Λ + +
(1.38)
Enfin, la relation d’entrées/sorties globale, valable pour toutes les configurations valides s’écrit :
( )( )( )( ) 0
i i i rr rt
out i ini i tr tt
A A I L V C V ES S
B V C V E M
M
ρ ∆ + − ∆ + +
= Λ + +
∑
(1.39)
Remarque 3. Si les liens externes de la cellule de commutation sont orientés de telle sorte
que la puissance soit sortante, 0M est alors une matrice anti-symétrique et donc iM aussi
et par conséquence M. En effet, iΛ étant une matrice diagonale et 0M une matrice anti-
symétrique, iM est une matrice anti-symétrique si et seulement si iΛ Σ est anti-
symétrique. Or comme 44i i iSΛ Σ = −Λ Λ (avec 44S anti-symétrique) iΛ Σ est bien une
matrice anti-symétrique.
3.3.2. Cas particulier Etudions maintenant, le cas particulier où seuls des changements de causalité au niveau d’éléments commutant surviennent. La relation (1.31) devient alors :
( )( )
0
44 44
I Λ I
0 I Λ Λ ' I 'i out i in
Ti i out i i in
B S M B S
- - Sc T B Sc T
− − Λ = − − Λ − Λ
(1.40)
Puisque ' 0inT = , on en déduit l’expression suivante pour la relation d’entrées/sorties dans
la config i :
( )10
Tout i in
i
S M B B S
M
−= − Λ Σ
(1.41)
Enfin, comme précédemment, on détermine la relation d’entrées/sorties globale valable pour toutes les configurations valides, on trouve alors :
( )( )10 44
Tout i i i i in
i
S M B I S B S
M
ρ − = − Λ − Λ − Λ ∑
(1.42)

Novembre 2007
42
Dans ce cas particulier, en appliquant les résultats généraux de la théorie des bond graphs (Karnopp, Margolis, 1990), il peut toujours être déterminé, pour chaque cellule de
commutation, une structure de jonctions avec comme vecteur d’entrée inS et comme
vecteur de sorties outS , correspondant à la relation (1.42), constituée de jonctions 0, 1, de
transformateurs et de gyrateurs dont les coefficients dépendent des variables iρ .
Le bond graph résultant correspondant à la représentation du système complet est déterminé par concaténation. Il est à causalité fixe bien que modélisant un système hybride utilisant une représentation idéale des interrupteurs. D’une manière générale, ce bond graph ne présente pas seulement l’avantage d’être à causalité invariante, il est aussi topologiquement plus simple comme cela a pu être constaté sur différents exemples (Cormerais, Richard, 2004), (Cormerais, Richard, 2005).
3.4. Equation d’état générique Le principal avantage d’une telle approche est qu’elle permet de déduire une équation d’état unique pour le système paramétrée par les booléens de commande. On aboutit alors à une équation d’état unique valable quelle que soit la configuration, (cf. relation (1.43)), la seule différence étant que, par rapport à l’équation (1.7), les matrices
ijS dépendent des booléens de commande représentés ici par le vecteur ρ.
11 13 13 11 13 1312
12 12
15 13 35
25
0 0
T Ti e ii
T T Tdd i e d
S S HS F S S HS F XI S X
XX S F F S F F
S S HSU
S
− − − = − − − −
+ +
ɺ
ɺ (1.43)
Dans le cas où les interrupteurs commutent par paire et en utilisant la notion de cellule de commutation, un bond graph équivalent peut être déduit dans lequel les interrupteurs ne sont plus modélisés par des sources mais des transformateurs ou des gyrateurs modulés (Buisson, Cormerais, 2002) dont les coefficients sont les booléens de commande associés à chaque paire d’interrupteurs. Remarque 4. La relation (1.43) qui est l’équation d’état unique pour le système exact peut être interprétée comme l’équation d’état du modèle moyen, les variables de commande devant alors être considérées comme continues et appartenant à l’ensemble [0,1].

Habilitation à Diriger des Recherches
43
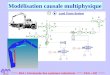
3.5. Exemple : cas du Convertisseur Cùk Illustrons cette notion de cellule de commutation à travers le cas d’un convertisseur de l’électronique de puissance, le convertisseur Cùk.
R3
R2 C2 R1
C1
E T2 T1
L2 L1
Figure 1.4. Schéma électrique du convertisseur Cùk
Par rapport au convertisseur classique, une résistance a été ajoutée en parallèle avec 1L et
une autre en série avec 1C (sans les résistances la structure du système est trop simple et
ne permet pas de mettre en évidence les résultats généraux sur les cellules de commutations énoncés dans les paragraphes précédents). Dans les conditions normales de fonctionnement, deux configurations sont valides pour ce système : la config 0 dans lequel l’interrupteur T1 est fermé (SE) et l’interrupteur T2 ouvert (SF) et la config 1 dans lequel l’interrupteur T1 est ouvert (SF) et l’interrupteur T2 fermé (SE). Mais deux autres modes correspondant à des fonctionnement dégradés peuvent survenir : la config 2 dans lequel les interrupteurs T1 et T2 sont fermés (SE) et la config 3 dans lequel les interrupteurs T1 et T2 sont ouverts (SF).
Sw:T2
0 Se:E 1
I:L 1 R:R1
1 0
Sw:T1
C:C1
1
2
4 3 6
0
I:L2
1
C:C2
9 10 5
11
7
La cellule de commutation
R:R3
8
0 R:R2
Figure 1.5. Bond graph causal du système dans la config 0
Le bond graph causal qui a été représenté figure 1.5 correspond à la config 0. Par application de la définition 1 (cf. §3.2), on détermine dans le cas présent une seule cellule de commutation pour le système (cf. figure 1.5). Considérant cette cellule, dans la configuration correspondant au bond graph causal de la figure 1.5 (i.e. la config 0), on a :

Novembre 2007
44
1
2
4
11
out
f
eS
f
e
=
, 7
8out
eD
f
=
et 9
10out
fT
e
=
(1.44)-(1.46)
Dans cette configuration, la relation (1.25) s’exprime alors sous la forme suivante :
1 1
2 2
4 4
11 11
7 7
8 8
9 9
10 10
0 1 0 0 1 0 0 0
1 0 0 0 0 0 1 0
0 0 0 1 0 0 0 1
0 0 1 0 0 1 1 0
1 0 0 0 0 0 1 0
0 0 0 1 0 0 0 1
0 1 0 1 1 0 0 1
0 0 1 0 0 1 1 0
f e
e f
f e
e f
e f
f e
f e
e f
− − − = − − − − −
(1.47)
Ce qui permet d’identifier les matrices 0M , A, B, C, E, 33S , 34S . Par application de (1.31)
et (1.39) on déduit la relation globale d’entrées/sorties pour la cellule de commutation. Cette relation est valable pour les quatre configurations. On trouve pour la matrice M , l’expression suivante :
( )
0 2 1 2 1 10 2 3
2 2 3 2 3 2 3
2 1 2 3 1 2 10 2 2 3 2 3
2 3 2 3 2 3
1 2 1 1 20 3
2 3 2 3 2 3 3
3 2 3 0 3 3 0 2 3 3
R
R R R R R R R
R R R RR R
M R R R R R R
R
R R R R R R R
R R R R
ρ ρ ρ ρ ρρ ρ ρ
ρ ρ ρρ ρ ρ ρ
ρ ρ ρ ρρ ρ
ρ ρ ρ ρ ρ ρ
+ + + + −
+ + + + + − − − = + + +
− − + + + +
− − − − +
(1.48)
Puisque la cellule de commutation contient des éléments résistifs, une représentation équivalente en terme de bond graph ne peut pas être réalisée. Néanmoins, une unique représentation peut être obtenue (cf. figure 1.6), le bloc M représentant sous une forme algébrique, la relation d’entrées/sorties globale de la cellule de commutation (avec comme liens d’entrées/sorties les liens 1, 2, 4 et 11).

Habilitation à Diriger des Recherches
45
Se:E
I:L1 R:R1
C:C1
1
2 4
3 6
0
I:L2
1
C:C2
5 11
M
Figure 1.6. Représentation globale du système sous une forme mixte (bond graph et
schéma Block)
D’après la figure 1.6 et en utilisant la relation (1.48), on obtient donc comme équation d’état unique pour le système :
( )
2 1 3 10 2
1 2 3 2 1 2 3
2 3 1 2 3 2 122 3
1 2 3 2 1 2 33
42 1 1 2
0 351 2 3 2 1 2 3 3
2 1 2
1 10
1 10
1 1 10
1 10 0
R
L R R L C R R
R R R Rp RL R R L C R Rp
q Rq
L R R L C R R R
L R C
ρ ρ ρρ ρ
ρ ρ ρρ
ρ ρ ρρ ρ
+ + −
+ +
− + − + + = + − + + +
−
ɺ
ɺ
ɺ
ɺ
2
3
4
5
0 2 1
2 2 3
2 10 2
2 3
1
2 3
0
p
p
q
q
R R R
R
ER R
R R
ρ ρ ρ
ρρ ρ
ρ
+ +
+ + + + +
+
(1.49)

Novembre 2007
46
4. DETERMINATION DE L’AUTOMATE HYBRIDE D’UN SYSTEME A COMMUTATIONS
Après avoir développé une méthode formelle de détermination de la partie continue des systèmes physiques à commutations, on s’intéresse maintenant à la détermination du modèle complet. Ce travail qui fait actuellement l’objet d’une thèse a pour but dans le cadre d’un formalisme de type automate hybride d’intégrer les résultats et propriétés issus de la modélisation de la partie continue pour en déduire une procédure systématique de détermination de l’automate hybride du système complet.
4.1. Le formalisme Automate Hybride L’automate hybride (Alur, Courcoubetis, 1995), (Zaytoon, 2001) est une extension de l’automate fini par l’ajout des variables continues qui constituent le vecteur d’état continu. Un automate hybride est totalement décrit par le n-uplet suivant
( )0 0, , , , , , ,H L X Inv Act Tt l X= Σ , où :
• L est l’ensemble des situations (états discrets) dont l0 est la situation initiale ;
• nX R⊆ est l’espace continu et 0X est l’état initial ;
• Σ est l’ensemble des événements ;
• Inv est l’ensemble des régions associées à chaque situation, appelé invariant. Inv(l) représente une région à laquelle l’état continu doit nécessairement appartenir pour
que la situation l soit active, pour tout l L∈ ;
• Act, appelé activité, associe à chaque situation une dynamique, qui, usuellement, est exprimée sous la forme d’une équation différentielle ;
• Tt est l’ensemble des transitions dont les éléments sont des quintuplets (l, guard, σ,
Jump, l’), où : , 'l l L∈ représentent la situation source et la situation cible ; guard
est une région à laquelle l’état continu doit nécessairement appartenir pour que la
transition se produise ; σ ∈Σ est un événement associé avec la transition ; Jump est une fonction qui permet de réinitialiser l’état continu lors du franchissement de la transition.
Remarque 5. Les invariants et les gardes (guards) sont des ensembles définis par des prédicats. Mais, dans la suite, afin de simplifier les notations, chacune de ces notions est employée, selon le contexte, comme un ensemble ou comme un prédicat.
On note par i Rδ +∈ la durée pendant laquelle la situation l i reste active, sa valeur étant
remise à zéro après chaque transition instantanée. Une trajectoire de l’automate est alors
une suite de triplets ( ), ,i i il Xδ soumis aux contraintes suivantes :

Habilitation à Diriger des Recherches
47
[ ] ( ) ( )( )
( )( ) ( )( )
1
1
0, ;
, , , , ,
où: X
0
i i i
i i
i i
i i i
t X t Inv l
i l guard Jump l Tt
guard
X Jump X
δσδ
δ
+
+
∀ ∈ ∈∀ ∃ ∈
∈=
(1.50)
4.2. Modèles d’interrupteurs dans le domaine de l’é lectronique de puissance
4.2.1. Introduction Dans le domaine de l’électronique de puissance et plus précisément des convertisseurs statiques, différents types d’interrupteurs sont utilisés au gré des applications, mais on peut les regrouper en un nombre restreint de catégories. Il est alors nécessaire de définir pour ces différentes catégories un modèle précis (Hautier, Caron, 1999). Dans la suite, il a été choisi, au vu de la méthode développée, de représenter ces modèles par des pseudo-automates hybrides et non des automates hybrides, à cela, trois raisons :
• les conditions de garde et les invariants sont exprimés en fonction de variables continues imposées par la structure de jonction aux interrupteurs
• il manque une dynamique associée à chaque état discret ;
• il n’y a pas de spécification sur la fonction de saut.
Hypothèse 1. Dans la suite on considérera que l’entrée de puissance U est continue, ce qui est fréquemment le cas dans les convertisseurs statiques de l’électronique de puissance qui constitue notre domaine privilégié d’applications.
4.2.2. Interrupteurs de base Classiquement, on utilise comme interrupteurs de base les diodes, les thyristors et les transistors. On y ajoute ici l’interrupteur commandable à l’ouverture ainsi qu’à la fermeture. Chaque interrupteur de base peut être modélisé par un pseudo-automate hybride à deux modes E (fermé, passant) et F (ouvert, bloqué). Dans la suite, on utilise pour les interrupteurs la convention de signe correspondant aux éléments générateurs d’énergie (cf. figure 1.7).
iD
uD
iT
uT
i t
ut
a) b) c)
i
u
d)
Figure 1.7. Conventions de signe pour : a) l’interrupteur idéal, b) le transistor et c) la
diode et d) le thyristor

Novembre 2007
48
Les modèles de type pseudo-automates hybrides des interrupteurs de la figure 1.7 sont donnés figure 1.8, où e et f sont des événements externes, b est un booléen de commande et i et u sont les notations classiques pour le courant et la tension.
[ud = 0] [id = 0]
c)
E
[id ≥ 0]
F [ud ≥ 0]
d)
F
[ i t = 0] e∧ [ut ≤ 0]
E
[i t ≥ 0] E
F
e f
a)
F
[b=0 ∨ iT=0]
E [iT ≥ 0]
b)
[b=1 ∧ uT≤0]
Figure 1.8. Modèles de type pseudo-automates hybrides pour : a) interrupteur idéal, b)
transistor, c) diode, d) thyristor
Remarque : dans tout ce paragraphe, les modèles d’interrupteurs utilisent la convention générateur contrairement aux paragraphes précédents où la convention récepteur était utilisée.
4.2.3. Interrupteurs composés Un des principaux problèmes qu’on rencontre dans une approche de type automate hybride est la dépendance exponentielle du nombre de modes avec le nombre d’interrupteurs. Dans certains cas, au vu des associations réalisées, il est intéressant de regrouper deux ou plusieurs interrupteurs et de remplacer l’ensemble par un interrupteur équivalent.
uT uD
iT iD
i
u b uT
uD
iT
iD
i
u b
a) b)
Figure 1.9. Montage d’un transistor et d’une diode en : a) anti-parallèle ; b) série.
E
F
[b = 0 ∧ i ≥ 0]
[b = 1 ∨ u = 0]
u ≤ 0
E
F
[b = 0 ∨ i = 0]
[b = 1 ∧ u ≤ 0]
i ≥ 0
a) b)
Figure 1.10. Les pseudo-automates hybrides des interrupteurs équivalents pour le
montage en : a) anti-parallèle et b) série d’un transistor et d’une diode

Habilitation à Diriger des Recherches
49
Deux cas d’associations d’interrupteurs utilisés dans les applications industrielles sont présentés figure 1.9, ainsi que leurs modèles pseudo-automates figure 1.10. Ces interrupteurs sont obtenus par l’association d’une diode et d’un transistor, soit en parallèle, soit en série (le but des deux montages est d’éviter une mauvaise polarisation du transistor).
4.3. Calcul des invariants On suppose, par la suite, que tous les interrupteurs utilisés ont une représentation de type pseudo-automate hybride similaire aux automates des figures 1.8 et 1.10.
Considérons un système à commutations comportant Swn interrupteurs. Soit
1 2, , ,SwnT T T… l’ensemble des interrupteurs du système, alors, l’invariant associé au mode
j est la conjonction des invariants associés avec le mode de chaque interrupteur :
( ) ( ) ( ) ( )1 21 2 n SwT T T nInv j Inv j Inv j Inv j= ∧ ∧ ∧… (1.51)
où l’argument ( ) , 1kT k SwInv j k n= … représente la condition de type invariant associée au
mode kj de l’interrupteur kT .
Dans le cas des pseudo-automates hybrides, les conditions de type invariant sont exprimées sous forme d’inégalités vis-à-vis des variables de tension/courant de Toutj. Pour avoir une représentation conforme au formalisme de l’automate hybride, il faut transformer ces inégalités exprimées en fonction de Toutj en inégalités qui sont fonction de l’état. En plus, pour tenir compte du sens de l’inégalité imposée pour Toutj ou de
l’inexistence d’une telle relation, il convient d’introduire une matrice diagonale jIC dont
les éléments diagonaux ont pour valeur ±1, si pour l’interrupteur correspondant il existe une condition de type invariant, 0, s’il n’y en a pas. Avec ces notations la relation (1.51) devient :
( ) 0jI outjInv j C T = ≥ (1.52)
En utilisant la forme standard implicite et compte tenu du fait que 0inT ≡ et que les
sources sont constantes, l’invariant peut s’exprimer en fonction de l’état du système et des grandeurs de puissance imposées par les sources. Ainsi la relation (1.52) exprimée en fonction de l’état dans le mode j s’écrit (Buisson, Cormerais, 2002) :
( ) 0j jI outj I ij ij dj dj ujC T C A X A X A U= + + ≥ (1.53)
Exprimée en fonction de l’état dans la configuration de référence, on trouve alors que :

Novembre 2007
50
( )1
2
0
0 0
0
Tj
j j TI outj I ij dj j r uj
P
C T C A A P X A U
= + ≥
I
(1.54)
Si la région qui définit l’invariant pour le mode donné est vide, alors on peut éliminer ce mode de l’ensemble des modes, ce qui va simplifier l’automate.
4.4. Analyse du comportement du système lors d’un événement de type commutation
4.4.1. Considérations générales Les transitions dans un automate hybride sont liées au changement de mode des interrupteurs. D’une manière générale, on peut distinguer deux types de transitions. Le premier type est la transition autonome qui est déclenchée par le fait que certaines
composantes de outT , correspondant aux interrupteurs changeant d’état, franchissent la
frontière de l’invariant et deviennent donc nulles. Un tel modèle décrit le changement d’état de la diode et le passage de E à F dans le cas du thyristor ou du transistor. Le deuxième type est la transition commandée qui est déclenchée par l’apparition d’un
événement externe, une condition supplémentaire sur certaines composantes de outT
pouvant alors être requise. Un tel modèle décrit les changements d’état de l’interrupteur idéal, du transistor et le passage de F à E du thyristor. Comme dans le §4.3, on considère que tous les interrupteurs du système ont un modèle du type pseudo-automate hybride similaire à ceux représentés figures 1.8 et 1.10. On appelle interrupteur « déclencheur » d’une transition, l’interrupteur qui change de mode car la condition de garde associée à cette transition dans son modèle pseudo-automate hybride est vérifiée. Dans le cas général, l’automate hybride est un graphe complet : en jouant sur la commutation de tous les interrupteurs à partir d’un mode donné, le système peut arriver dans toutes les autres configurations possibles. Le problème qu’on se pose est de savoir quand le changement de mode de l’interrupteur « déclencheur » de la transition est accompagné (ou non) d’autres changements d’état discret d’interrupteurs. Les raisonnements suivants restent valables même si on considère le cas de plusieurs interrupteurs « déclencheurs ». Pour l’automate hybride du système complet, lors du passage d’un mode i vers un mode j, l’état doit satisfaire les conditions suivantes (Buisson, Cormerais, 2004) :
• l’état après la commutation doit respecter l’invariant du mode j. Autrement dit :
( ) ( )X Jump X Inv j+ −= ∈ , qui permet de garantir une des contraintes de (1.50).

Habilitation à Diriger des Recherches
51
Cette condition n’a pas à être explicitée sur la garde, elle est prise en compte implicitement par l’automate hybride.
• l’amplitude des impulsions sur les composantes de Toj doit être positive, de façon à respecter pendant la transition l’invariant du mode j. Cette seconde transition doit apparaître dans la garde.
Par la suite, on traite les deux cas énoncés ci-dessus.
4.4.2. Condition d’invariant Dans un premier temps, pour le mode i donné, on s’intéresse à la condition du passage du mode i vers le mode j due à l’interrupteur « déclencheur » Tk , soit :
( ) ( ), ,k kT T k kguard i j guard i j= (1.55)
où ( ),kT k kguard i j représente la condition nécessaire pour que la commutation de ik à jk de
l’interrupteur Tk puisse s’effectuer. La condition (1.55) pour une transition autonome peut être déduite par un raisonnement similaire à celui qui a permis de trouver l’invariant, c’est-à-dire en exprimant Tout en fonction de l’état. Donc, si on considère le cas général avec plusieurs interrupteurs « déclencheurs », on obtient que :
( , ) 0k
ijT I outiguard i j C T = = (1.56)
où la matrice ijIC est une matrice déduite de la matrice i
IC , dans laquelle on ne garde que
les lignes correspondant aux interrupteurs « déclencheurs ». De (1.56), on peut déduire des relations équivalentes aux relations (1.53) et (1.54).
Dans le cas où une des composantes de ijI outiC T ne dépend pas de l’état, il n’y a pas de
frontière correspondante à cet interrupteur, on considère alors que cet interrupteur ne peut pas être un interrupteur « déclencheur ». Ainsi on évite un comportement de type réticence (« chattering »).
La condition de garde (1.56) ne dépend que des matrices de la structure de jonction associées au mode source (mode i). Pour une transition commandée, la condition (1.55) s’écrit de manière similaire aux conditions de type invariant (1.52) :
( , ) 0k
ijT I outiguard i j C T = ≥ (1.57)
où la matrice ijIC s’écrit similairement au cas autonome.
La commutation de l’interrupteur « déclencheur » peut modifier certaines contraintes algébriques reliant l’état aux composantes de Toutj correspondant aux autres interrupteurs
(des lignes de la matrice ( )ij dj ujA A A associée à la relation (1.53) changent). Ainsi, en

Novembre 2007
52
fonction de la valeur de l’état avant la commutation, cette modification des contraintes peut entraîner le non respect de la condition d’invariant. Il est donc nécessaire de considérer la commutation possible d’autres interrupteurs, afin d’obtenir une configuration pour laquelle cette condition d’invariant est vérifiée.
4.4.3. Condition sur les impulsions Dans un deuxième temps, on s’intéresse à l’expression des contraintes imposées aux impulsions qui peuvent apparaître pour certaines composantes de Toutj lors du passage du
mode i vers le mode j. Si on note par jT le vecteur amplitude de la partie impulsionnelle de Toutj à l’instant de la commutation, alors la condition imposée aux impulsions au moment du passage du mode i vers le mode j s’écrit (Buisson, Cormerais, 2002) :
0j jIC T ≥ (1.58)
On notera que la condition exprimée par (1.58) dépend seulement du mode cible. On peut donc affirmer que la condition imposée aux impulsions ne dépend pas de l’interrupteur « déclencheur » Tk. En utilisant (1.52), la condition de type impulsion se traduit en fonction de l’état continu avant et après la commutation exprimé dans le modèle du mode cible par :
( )24 0j j j TI I j dj djC T C S X X+ −= − ≥ (1.59)
ce qui peut s’écrire, en utilisant la forme standard implicite (1.1), en fonction des variables d’état avant la commutation :
( ) 0jI ij ij dj dj ujC G X G X G U− −+ + ≥ (1.60)
Des relations équivalentes peuvent être écrites en fonction de l’état de la configuration de référence :
( ) 0jI rj r ujC G X G U− + ≥ (1.61)
Ainsi, tout comme dans le cas de la condition d’invariant, le non respect de la condition sur les impulsions dans le mode atteignable par le seul changement de l’interrupteur « déclencheur » conduit à un changement simultané d’interrupteurs. L’unicité de la trajectoire n’étant pas garantie dans le cas général, il est donc théoriquement possible de trouver plusieurs configurations cohérentes. Ceci ne constitue pas une contradiction avec le formalisme de l’automate hybride qui est un modèle non déterministe. Néanmoins, la pratique montre que les systèmes utilisés sont déterministes et l’on ne trouve qu’un seul mode qui peut devenir actif. Les relations (1.56), (1.57) et (1.58), déterminées pour chaque combinaison d’interrupteurs « déclencheurs », constituent alors la condition de garde (Zainea, Godoy, 2005), (Zainea, Buisson, 2005).

Habilitation à Diriger des Recherches
53
5. CONCLUSION
L’apport principal de la méthode présentée ici est son caractère générique et formel. De plus, étant basée sur des principes énergétiques et utilisant le formalisme bond graph, elle permet au vu des propriétés structurelles du système de conclure sur le comportement du dit système (présence ou non de discontinuités à la commutation, détermination de l’automate hybride,….). L’approche décrite ici, en particulier la première partie concernant la modélisation de la partie continue des systèmes à commutations est à mettre en parallèle avec les travaux développés par B. Maschke et C. Valentin dont la méthode basée sur le formalisme hamiltonien et la notion de ports de Dirac conduit elle aussi à une démarche systématique et générique. Une présentation et comparaison de ces deux approches peut être trouvée dans (Cormerais, Valentin, 2007). D’un autre point de vue, le caractère systématique et formel de la méthode a permis d’envisager sa réalisation sous la forme d’un programme utilisant le calcul symbolique. Ce programme a été mis au point via l’outil Mathematica (Cormerais, Buisson, 2002). Il permet de calculer, pour un système donné, toutes les configurations valides, ainsi que pour chacune de ces configurations, la forme standard implicite et l’équation d’état correspondante. De plus les calculs des discontinuités et des impulsions ont été effectués ainsi que la détermination des invariants associés à chaque mode. Tous ces calculs sont effectués à partir de la seule connaissance de la structure de jonction dans la configuration de référence et des lois constitutives des différents éléments.

Novembre 2007
54

Habilitation à Diriger des Recherches
55
CHAPITRE 2
Analyse des Systèmes Physiques à Commutations à l’aide du Formalisme Bond Graph
1. INTRODUCTION
Les recherches que j’ai entreprises dans ce domaine se sont focalisées sur deux thèmes : la caractérisation du comportement des systèmes physiques à commutations et l’étude de la stabilité. Le premier thème s’est fondé sur les résultats issus du formalisme LCP (Linear Complementarity Problem) appliqué au cas des systèmes RLCGT (systèmes composés de résistances, inductances, capacités, transformateurs et gyrateurs) contenant des diodes. En utilisant cette approche, il a été possible de montrer, si le système satisfait certaines conditions, l’existence et l’unicité de la solution (Hemeels, Camlibe, 2001) en terme de trajectoire dans l’espace d’état. Basé sur des concepts énergétiques, il nous est apparu intéressant d’utiliser le formalisme bond graph afin de parvenir à une reformulation de ces conditions permettant ainsi la mise en évidence de propriétés structurelles que le système devait satisfaire. De plus, le problème de la solution initiale a lui aussi été étudié. Des conditions nécessaires ont été établies (au niveau de la topologie même du système) permettant de conclure quant à l’existence de discontinuités du vecteur d’état lors des changements de configurations (Morvan, Cormerais, 2003b). Concernant l’étude de la stabilité, des approches ont été développées permettant de conclure sur la stabilité des systèmes linéaires continus sans avoir à déterminer l’équation d’état du système ou une fonction candidate de Lyapunov. Parmi ces approches, on peut citer une méthode graphique utilisant le formalisme bond graph (Junco, 2001). Les concepts de stabilité en liaison avec le formalisme bond graph avaient déjà été mis en évidence dans des travaux antérieurs (Grujic, Dauphin-Tanguy, 1996a), (Grujic, Dauphin-Tanguy, 1996b). Parallèlement, dans le domaine des systèmes physiques à commutations, des travaux utilisant la notion de fonction de Lyapunov multiple ont été envisagés. Dans le contexte de la thèse de Cécile Morvan, une méthode originale, basée sur la notion d’observabilité et utilisant le formalisme bond graph, a été élaborée, afin d’étudier la

Novembre 2007
56
stabilité structurelle du système d’abord pour le cas des systèmes physique continus puis l’approche a été étendue au cas des systèmes physiques à commutations (Morvan, Cormerais, 2003a), (Morvan, 2004). Dans la suite de ce chapitre, on s’intéressera exclusivement à la notion de stabilité. Après une première partie consacrée à un bref rappel sur cette notion et son extension au cas des systèmes à commutations, la seconde présente comment à l’aide du formalisme bond graph on peut conclure sur la stabilité structurelle, d’abord pour le cas des systèmes physiques continus, puis pour le cas des systèmes physiques à commutations.
2. QUELQUES CONSIDERATIONS SUR LA STABILITE DES SYSTEMES HYBRIDES
2.1. Généralités L’étude de la stabilité des systèmes hybrides s’avère difficile car, bien qu’étant constitués de sous-systèmes continus stables, le système hybride résultant peut être instable comme l’illustre l’exemple suivant (Branicky, 1998) où le système hybride ici considéré est
constitué des deux sous-systèmes linéaires suivants XAXf 11 )( = et XAXf 22 )( = , avec :
−−−
=1.010
11.01A et
−−−
=1.01
11.02A (2.1)-(2.2)
La loi de commutation est telle que dans les deuxième et quatrième quadrants, le système
est régi par la dynamique 1( )f X et dans les premier et troisième quadrants par la
dynamique 2( )f X . Chaque sous système ( )iX f X=ɺ (avec 1,2i = ) est asymptotiquement
stable. Mais comme l’atteste la figure 1.1. le système à commutations résultant est instable.
Figure 2.1. Cas d’un système hybride instable

Habilitation à Diriger des Recherches
57
L’analyse de la stabilité d’un système hybride peut donc être problématique et il apparait difficile d’établir une méthode d’analyse globale prenant en compte non seulement le comportement continu du système, mais aussi son comportement discret. Dans son acception la plus générale, la stabilité d’un système à commutations (qu’elle soit asymptotique, exponentielle ou autre….) peut être envisagée selon deux grands points de vue :
1. On cherche à conclure sur la stabilité du système indépendamment de toute loi de commande.
2. On cherche à déterminer pour un système donné, les lois de commandes permettant de stabiliser le dit système.
Il est clair que pour l’exemple précédemment cité, si le système n’est pas asymptotiquement stable quelle que soit la loi de commande envisagée, on peut trouver des conditions de commutation le stabilisant.
2.2. A propos de la stabilité des systèmes à commut ations
Considérons un système à commutations dont la représentation d’état s’exprime comme suit :
))(())(),(()(
)( tXftPtXfdt
tdXtP≡= avec )(tPff = si ( ) )(tPtX Ω∈ (2.3)
où
• )(tP est une fonction à valeur dans l’ensemble 1 à n permettant de définir l’état
discret du système. La valeur de )(tP donne le mode dans lequel se trouve le
système, elle définit donc le champ vectoriel f pour le mode.
• ( )P tΩ est un sous-ensemble de l’espace d’état associé au champ vectoriel ( )P tf .
Par analogie avec les systèmes continus, les méthodes d’analyse de la stabilité utilisent principalement des pseudo-fonctions de Lyapunov multiples concaténées conduisant à l’expression d’une fonction de Lyapunov non classique, continue par morceaux et dérivable par morceaux comme par exemple dans (DeCarlo, Branicky, 2000), (Ye, Michel, 1998), (Branicky, 1998), (Wicks, Peleties, 1994). Les dynamiques du système à commutations sont définies par une séquence de commutation, qui spécifie d’une part le sous-système à activer à un point de commutation, et d’autre part l’instant de commutation (Peleties, DeCarlo, 1991). On dispose alors des définitions et théorèmes suivants :

Novembre 2007
58
Définition 1.
On appelle pseudo fonction de Lyapunov pour le système )(XfX i=ɺ et le point
d’équilibre nei iX ∈Ω ⊂ ℜ associé au champ if (l’espace d’état), une fonction à valeurs
réelles )(XVi définie sur la région iΩ et satisfaisant les conditions suivantes :
i. La fonction )(XVi est définie positive : ( ) 0i eiV X = et 0)( >XVi pour ei iX X≠ ∈Ω
ii. La dérivée de )(XVi est semi-définie négative :
0)()(
)( ≤∂
∂= Xf
X
XVXV i
iiɺ pour iX Ω∈ (2.4)
Dans le cas d’un système à commutations linéaires de la forme :
XAf ii = (2.5)
L’étude de la stabilité développée par Peleties et DeCarlo (Peleties, DeCarlo, 1991) conduit au théorème suivant qui permet de déterminer si le système est asymptotiquement stable (DeCarlo, Branicky, 2000).
Théorème 1.
Supposons que nii ℜ=Ω∪ , avec nℜ l’espace d’état pour le système considéré. Soient i
et j , tels que :
i. ji <
ii. ji tt < , les instants de commutations respectifs
iii. )()( ji tPtP =
Si on peut trouver une famille de pseudo-fonctions de Lyapunov ( ) , 1,...,iV X i M= ,
chacune associée au champ de vecteurs ( )if X tel qu’il existe un 0>γ satisfaisant : 2
11)(1)( )())(())(( +++ −≤− iitPjtP tXtXVtXVij
γ (2.6)
alors le système défini par les champs de vecteurs XAXf ii =)( est globalement
asymptotiquement stable.
il faut donc qu’on ait une décroissance globale des fonctions de Lyapunov d’où la dénomination de globalement asymptotiquement stable pour le système : c’est ce qu’on appelle la condition de séquence non croissante (Branicky, 1997). Une extension au cas des systèmes à commutations composés de sous-systèmes non linéaires a lui aussi été considéré par Branicky et De Carlo (Branicky, 1994), (DeCarlo, Branicky, 2000). Il consiste en une généralisation des résultats obtenus pour les systèmes linéaires par Peleties (Peleties, DeCarlo, 1991).

Habilitation à Diriger des Recherches
59
3. ETUDE DE LA STABILITE STRUCTURELLE DES SYSTEMES PHYSIQUES A COMMUTATIONS
3.1. Introduction
Dans un premier temps nous allons nous intéresser à l’étude de la stabilité à l’origine d’un
système physique à commutations autonome (0U = ) dans une configuration donnée pour lequel il n’y a aucun élément en causalité dérivée. Ceci est donc équivalent à l’étude de la stabilité d’un système physique continu autonome. Le but est de fournir une méthode permettant de conclure sur la stabilité sans avoir à connaitre l’équation d’état du système ou à définir une fonction candidate de Lyapunov. L’idée est d’utiliser la notion d’observabilité et de permettre via l’outil bond graph la mise en œuvre d’une méthode graphique. La notion sera étendue au cas des systèmes physiques à commutations pour lesquels quelle que soit la configuration valide le vecteur d’état reste inchangé et tous éléments de stockage conservent leur causalité intégrale, ce cas correspondant aux systèmes étudiés chapitre1.§3.3.
3.2. Modèle du système physique à commutations Considérons un système physique tel que défini au chapitre 1 §2.1 pour lequel on suppose que quelle que soit la configuration permise, tous les éléments de stockage d’énergie sont en causalité intégrale. Dans ce cas, la forme standard implicite dans une configuration donnée s’écrit :
11 13 14
13 33 34
14 34 44
Tout in
T Tout in
S S SX ZD S S S DT TS S S
= − − −
ɺ
(2.7)
(on a volontairement omis de faire figurer dans (2.7) la relation sur V) Les relations constitutives, linéaires, sur les éléments de stockage et de dissipation sont :
in outD L D
Z F X
= =
(2.8)
où F et L sont des matrices symétriques définies positives.
Si ( ) 1
33H L I S L−= − existe, ce qui est le cas lorsque L est une matrice symétrique définie
positive, alors la seconde ligne de (2.7) nous permet d’écrire que :
13T
inD HS FX= − (2.10)

Novembre 2007
60
Il s’agit d’une équation d’observation de la forme :
inD CX= avec 13TC HS F= − (2.11)
Par insertion de (2.11) dans la première ligne de (2.7) et sachant que 0inT = dans la
configuration donnée, on trouve que :
( )11 13 13TX S S H S F X
A
= −ɺ
(2.12)
qui constitue l’équation d’état pour notre système dans la configuration donnée. 3.3. Stabilité des Systèmes Continus 3.3.1. Rappels - Résultats généraux sur la stabilit é des systèmes
physiques Pour commencer, rappelons quelques résultats importants concernant l’étude de la stabilité des systèmes continus autonomes et en particulier le second théorème de Lyapunov :
Théorème 2. (Second Théorème de Lyapunov)
Considérons un système physique régi par l’équation d’état suivante :
0))(()( ≥∀= ttXftXɺ (2.13) On dispose alors des deux résultats importants suivants
a) Le système est simplement stable à l’origine si on peut trouver une fonction )(XV
définie positive telle que ( )V Xɺ soit semi-définie négative.
b) Le système est asymptotiquement stable à l’origine si on peut trouver une fonction
)(XV définie positive telle que ( )V Xɺ soit définie négative. La fonction )(XV est alors
appelée fonction de Lyapunov.
Remarque 1. Dans la suite de ce chapitre, on s’intéressera exclusivement à la notion de stabilité asymptotique (qui sera confondue par abus de langage avec la notion de stabilité). L’inconvénient majeur du second théorème de Lyapunov est qu’il n’existe pas de
procédure systématique permettant la détermination d’une fonction de Lyapunov )(XV .
Or les résultats obtenus sur l’analyse de la stabilité du système sont basés sur le choix de cette fonction. Dans le cas des systèmes physiques, l’idée couramment admise est de prendre comme première fonction candidate de Lyapunov l’énergie stockée dans le système. Cette fonction candidate étant une forme quadratique en l’état, sa dérivée orbitale sera directement le flux de puissance dans les éléments de stockage.

Habilitation à Diriger des Recherches
61
Si )()(
XVdt
XdV ɺ= est simplement semi-définie négative on peut néanmoins conclure sur
la stabilité asymptotique du système si la propriété suivante est vérifiée :
Propriété 1 (complément à la proposition b) du théorème 2).
Dans le cas où ( )V Xɺ est seulement définie semi-négative le système (2.13) est
asymptotiquement stable si et seulement si aucune solution ( )X t autre que la solution
triviale 0X ≡ ne vérifie 0V(X) ≡ɺ
Cette propriété découle directement du principe d’invariance de LaSalle dont la formulation mathématique est la suivante :
Principe d’Invariance de LaSalle
Soient ℜ→ℜnV : une fonction localement définie positive
)(XVɺ sa dérivée orbitale, semi-définie négative
0)( =Ω∈= XVXS ɺ , avec Ω voisinage de l’origine
Si S ne contient pas d’autre ensemble invariant que 0X = , alors l’origine est
asymptotiquement stable.
Le fait de ne pouvoir conclure sur la stabilité asymptotique du système qu’en appliquant le Principe d’Invariance de LaSalle signifie que le choix de la fonction candidate de
Lyapunov n’a pas été optimal. Il existe donc une fonction ( )V X permettant de conclure
directement sur la stabilité asymptotique du système sans avoir à utiliser la propriété 1. Le problème est de la déterminer. Pour ce faire, il existe une méthode basée sur l’Inégalité de Young. Elle permet, grâce à un algorithme, de vérifier si la fonction candidate de
Lyapunov a les bonnes propriétés à savoir : ( )V X définie positive et ( )V Xɺ définie
négative. Le principe est de partir d’une fonction quadratique et de la modifier en augmentant son degré, jusqu’à ce qu’elle possède les bonnes propriétés. Malheureusement, comme pour la détermination de la fonction candidate de Lyapunov initiale, les modifications à apporter ne relèvent pas d’une procédure systématique. On lui préférera donc en définitive l’approche utilisant le théorème de LaSalle.
3.3.2. Choix de la fonction candidate de Lyapunov Le principe de la méthode décrite dans les paragraphes suivants consiste à relier la notion de stabilité à celle d’observabilité.

Novembre 2007
62
Soit le système physique continu régi par l’équation d’état (2.12). On choisit comme fonction candidate de Lyapunov, l’énergie stockée dans les éléments inductifs et capacitifs. On a alors :
1
2
TV X FX= (2.14)
Sa dérivée orbitale qui correspond à la puissance traversant les éléments de stockage d’énergie s’écrit :
TSV P Z X= =ɺ ɺ (2.15)
D’après (2.12), on obtient :
)( 11 13 13T TV Z S S H S Z= −ɺ
11S étant une matrice anti-symétrique et en utilisant la relation constitutive (2.8) sur les
éléments de stockage, on trouve que :
13 13 13 13T T T TV Z S HS Z X FS HS FX= − = −ɺ
Cette fonction étant au moins semi-définie négative, le système est au moins simplement stable.
Soit Tr in outP D D= la puissance stockée dans les éléments résistifs du système, sachant
0s rP P+ = , Vɺ peut aussi s’écrire : 1T T T
r in outV P D D X C L CX−= − = − = −ɺ (2.16)
La relation (2.16) est bien identique à (2.15) puisque 1T -H L H H− est une matrice antisymétrique.
3.3.3. Stabilité asymptotique et Observabilité De l’équation (2.16), on déduit que :
0 0V CX= ⇔ =ɺ (2.17)
Dans le cas le plus général, la matrice C n’étant pas inversible, la solution de (2.17) n’est
donc pas 0≡X et Vɺ est donc seulement définie semi-négative. Plutôt que d’utiliser la
propriété 1 afin de conclure sur la stabilité asymptotique, nous allons utiliser une approche basée sur la notion d’observabilité qui s’énonce ainsi :
Proposition 1. Un système physique continu linéaire et autonome, défini par l’équation d’état (2.12) est asymptotiquement stable à l’origine de son espace d’état si et seulement si il est
observable vis à vis de la sortieinD (cf. équation (2.10) qui correspond à toutes les
variables de puissance traversant le champ résistif.

Habilitation à Diriger des Recherches
63
Démonstration :
Soit
( ) ( )XVtd
dXV
k
kk =)( avec 1≥k (2.18)
Calculons ( ) VV ɺɺ=2 , on trouve que : ( )( ) )( XACLCCLCAXXV TTTT 112 −− +−= (2.19) ( ) 02 =V si 0=CAX (2.20) ( ) ( ) )( XACLCCALCACLCAXXV TTTTTT 211123 2 −−− ++−= (2.21)
Une simple récurrence permet de déterminer l’expression générale de (k)V :
( ) ( ) XACLCApnp
nXXV i
kTikTT(k)
−−= ∑
−−−−1
0
11
)!(!
! (2.22)
En utilisant cette expression, la nullité simultanée de toutes les dérivées successives de
( )XV jusqu’à l’ordre n devient équivalente à l’équation matricielle linéaire
suivante (Morvan, Cormerais, 2003a) :
0=XOobs avec
=
−1
2
n
obs
CA
...
CA
CA
C
O (2.23)
Ainsi, on peut conclure que si le système est observable, i.e. que obsO est une matrice de
rang plein, la proposition 1. est vraie.
Reste maintenant à montrer que si ( ) 0≡XVɺ alors la proposition 1 est vraie. Supposons
que ( ) 0≡XVɺ , il en résulte que nk ≤∀ , 0)( ≡kV ou, de façon équivalente, que
0≡XOobs . Puisque obsO est de rang plein, 0≡X , ce qui prouve la proposition 1.
On vérifie donc bien que l’observabilité du système, avec iD comme vecteur de sortie,
implique la stabilité asymptotique.
3.3.4. Stabilité Asymptotique et Formalisme Bond Gr aph Des techniques utilisant le formalisme bond graph existent afin de conclure sur la stabilité simple ou la stabilité asymptotique des systèmes physiques. A ce titre, on peut mentionner les travaux de S. Junco basés sur la notion de chemin causal (Junco, 2001a), (Junco, 2001b). La méthode est basée sur les deux propositions suivantes :

Novembre 2007
64
Proposition 2. (Junco, 2001a) Si l’origine est asymptotiquement stable, alors chaque élément de stockage I, C impose la causalité à un élément dissipatif R Existence d’un chemin causal simple (Van Dijk, Breedveld, 1991) entre chaque élément de stockage I, C et un élément résistif R.
Proposition 3. (Junco, 2001a)
Cas de la stabilité simple : si tous les éléments R sont dissipatifs ( )0>R , et si chacun
d’entre eux a une causalité imposée par une seule variable d’état, alors l’origine est stable au sens de Lyapunov. Cas de la stabilité asymptotique : la proposition 2 étant vraie, si tous les éléments R sont
dissipatifs ( )0>R et si chacun d’entre eux a une causalité imposée par une seule variable
d’état, alors l’origine est asymptotiquement stable.
Le problème est que dans certains cas particuliers cette procédure ne permet pas de conclure directement sur la stabilité asymptotique du système . Le résultat du §3.3.3. concernant la stabilité asymptotique est basé sur la notion d’observabilité. Or, cette notion peut être directement définie à partir du bond graph du système en utilisant la proposition suivante. Elle concerne l’observabilité structurelle d’un système et s’énonce comme suit (Sueur, Dauphin-Tanguy, 1989), (Dauphin-Tanguy, Sueur, 2000) :
Proposition 4. Un modèle bond graph est structurellement observable vis-à-vis de l’état si et seulement si les conditions suivantes sont respectées: Sur le modèle bond graph BGI, il existe un chemin causal (simple ou mixte, (Van Dijk, Breedveld, 1991)) entre tous les éléments dynamiques I et C en causalité intégrale et un
détecteur eD ou fD .
Tous les éléments dynamiques I et C ont une causalité dérivée sur le modèle bond graph BGD.
Dans notre cas, le BGI est tel que chaque élément I ou C est en causalité intégrale, et le BGD est tel que chaque élément I ou C est en causalité dérivée. Dans la proposition précédente, le chemin causal peut être simple ou mixte. Au vue de la relation existant entre l’observabilité et les propriétés structurelles du bond graph, la méthode algébrique énoncée au §3.3.3. peut donc trouver son équivalent graphique.

Habilitation à Diriger des Recherches
65
3.4. Extension au cas des systèmes physiques à comm utations, Etude de la Stabilité
3.4.1. Introduction L’étude de la stabilité réalisée au §3.3 peut être étendue au cas des systèmes linéaires à commutations, comportant des interrupteurs idéaux totalement commandés. Comme précédemment, la stabilité dont nous parlons est celle des systèmes autonomes (i.e.
0=U ) à l’origine de l’espace d’état. D’autre part, on se restreint au cas où tous les éléments I, C sont en causalité intégrale quelle que soit la configuration envisagée. Dans ce cas, si on suppose que le système a l configurations, il peut être modélisé avec l’ensemble suivant d’équations linéaires d’état et d’observation :
XAX j=ɺ (2.24)
XCD ji = avec 1,....,0 −∈ lj (2.25)
Comme on se trouve dans le cas particulier du chapitre 1, §3.3, une équation d’état unique
peut être déterminée analogue à (2.12) dans lequel les sous-matrices ijS dépendent des
booléens de commande du système. La fonction candidate de Lyapunov choisie étant l’énergie stockée dans le système, elle est égale à :
( ) FXXXV T
2
1= (2.26)
Puisque le vecteur d’état reste inchangé quelle que soit la configuration, cette fonction reste formellement la même. Supposons maintenant que pour ce système à l configurations, l’espace d’état peut être
séparé en l sous-domaines appelés jR (avec ∅=∩ ji RR et étatdespaceRjj
'=∪ ), où
l’on a 1,....,0 −∈ lj , le système étant dans la configuration j dans la zone jR .
Les frontières entre ces différents sous-domaines définissent de façon évidente les lois de commutation (cf. figure 2.2) (Morvan, Cormerais 2003a). Le problème est maintenant de déterminer les conditions qui assurent la stabilité asymptotique lorsque le système commute. En fait, le but est de déterminer des lois de commutation appropriées de telle façon que le système soit asymptotiquement stable.

Novembre 2007
66
Mode0
Mode1
Mode2
Mode3
x1
x2
Figure 2.2. Partition de l’espace d’état
3.4.2. Bilan énergétique à l’instant de commutation Dans le cas général, quand une causalité dérivée affecte des éléments I, C, les variables d’état peuvent être discontinues et le bilan énergétique est tel que l’énergie stockée diminue alors que l’énergie dissipée dans les interrupteurs est toujours positive. Dans le cas particulier étudié ici, puisque tous les éléments sont en causalité intégrale, aucune discontinuité sur les variables d’état ne peut apparaître. En conséquence, il n’y a pas d’énergie dissipée dans les interrupteurs aux instants de commutation. Concernant l’énergie stockée, elle est donc continue aux instants de commutation (Buisson, Cormerais, 2002).
3.4.3. Etude de la stabilité asymptotique globale d es systèmes à commutations
En utilisant les résultats du §3.3 et puisqu’il n’y a pas d’énergie dissipée ou stockée à la commutation, on peut déduire la proposition suivante à propos de la stabilité asymptotique globale pour ce type de système physique à commutations.
Proposition 5. (Morvan, Cormerais, 2003a)
Soit jobsO la matrice d’observabilité associée au mode j et [ ]jobsOKer , le noyau de
l’application linéaire représentée par la matrice jobsO , alors le système est globalement
asymptotiquement stable si et seulement si :
1,....,0 −∈∀ lj , [ ] 0ouROKer jjobs ∅=∩ (2.27)
Démonstration :
Quel que soit le mode j dans lequel se trouve le système, la fonction de Lyapunov )(XV
est définie positive, mais généralement, )(XVɺ est seulement définie semi-négative. Donc,

Habilitation à Diriger des Recherches
67
[ ]jobsOKer représente, pour le mode j, l’ensemble des X tels que 0)( ≡XVɺ . Il apparaît
clairement que le système sera globalement asymptotiquement stable si cet ensemble ne peut pas être atteint quand le système est dans le mode j (cf. proposition 1) : ce qui est assuré par la condition (2.27).
Remarque 2. Si dans tous les modes [ ] 0=jobsOKer , alors, pour n’importe quelle loi de
commutation, le système est globalement asymptotiquement stable.

Novembre 2007
68

Habilitation à Diriger des Recherches
69
CHAPITRE 3
Synthèse de Commandes pour les Systèmes Physiques à Commutations
1. GENERALITES SUR LA COMMANDE DES SYSTEMES A COMMUTATIONS
Sujet à des recherches actives depuis maintenant plusieurs années, la difficulté inhérente à la synthèse d’une commande pour un système à commutations tient dans la nature même de ce système qui associe dynamiques continues et dynamiques discrètes. Si la commande des systèmes continus constitue un domaine quasiment abouti, il n’en est pas de même pour les systèmes à commutations. Deux types de commandes peuvent être distingués suivant la nature même du système et des configurations permises. A noter que comme dans les chapitres 1 et 2, on supposera une représentation idéale de l’élément commutant. 1. Cas des systèmes à commutations pilotées : Ce sont les systèmes dans lesquels les changements de configuration résultent exclusivement de l’évolution d’une grandeur externe (booléen de commande). On peut citer les systèmes dont les éléments commutant sont des interrupteurs totalement commandés (cas des convertisseurs multiniveaux par exemple) ou des systèmes composés d’interrupteurs totalement commandés et de diodes. Une sous-catégorie importante, relative au domaine de l’électronique de puissance, est celle pour laquelle les changements de configurations résultent d’une commutation par paire au niveau des interrupteurs du système (soit entre deux interrupteurs commandés comme dans le cas des convertisseurs multiniveaux, soit entre un interrupteur totalement commandé et une diode comme dans le cas convertisseurs boost, buck, etc….). Ici, quelle que soit la configuration considérée, l’ordre du système ainsi que les composantes du vecteur d’état restent inchangés et une équation d’état générique peut être déterminée paramétrée par les booléens de commande (cf. chapitre 1, §3). De plus, l’état reste continu lors des commutations. 2. Cas des systèmes à commutations pilotées et/ou autonomes : Doivent être inclus dans cette catégorie les systèmes contenant des interrupteurs totalement commandés, des thyristors ou des diodes. Dans ce cas, les changements de configuration du système peuvent comme précédemment résulter du changement d’une grandeur booléenne externe provoquant de fait le changement d’état d’un interrupteur

Novembre 2007
70
totalement commandé ou résulter du changement d’état d’une diode ou d’un thyristor suite à l’évolution d’une grandeur interne au système (variable de tension ou de courant aux bornes de cet élément commutant). Sont inclus dans cette catégorie les convertisseurs DC-DC de type boost ou buck dans le cas des fonctionnements à conduction discontinue. Si le changement de configuration ne résulte pas d’une commutation par paire d’interrupteurs, un changement de causalité au niveau d’un élément résistif ou d’un élément de stockage d’énergie survient provoquant dans ce dernier cas un changement d’ordre du système. Le vecteur d’état n’est plus un invariant et certaines composantes peuvent être discontinues à la commutation. Concernant la commande elle-même, et indépendamment de la nature du système considéré, deux grandes méthodes peuvent être envisagées : la commande directe, pour laquelle les grandeurs de commande sont directement booléennes ou la commande continue dans lequel les grandeurs de commande évoluent continument dans l’intervalle [0,1]. Dans ce cas, la notion de modèle moyen doit être utilisée et une modulation par largeur d’impulsion mise en œuvre afin de générer les grandeurs booléennes effectivement envoyées aux interrupteurs du système. Sans être exhaustif, la suite de ce paragraphe est consacré un tour d’horizon des grandes approches et méthodes de commande aujourd’hui utilisée pour les systèmes à commutations. 1. Cas des systèmes à commutations pilotées :
• Un premier type de commande envisagé est celui visant à la seule stabilisation du système. Ici donc pas d’objectif de régulation ou de suivi de trajectoire. Dans cette catégorie, on peut citer les travaux de De Leenheer, Nijmeijer et De Jager qui ont considéré le cas des systèmes hybrides non linéaires (De Leenheer, Nijmeijer, 2002), ainsi que ceux de Liberzon (Liberzon 1999) .
• Un deuxième type de commande repose quant à lui sur la recherche de solutions optimales. Dans cett catégorie, on peut citer les méthodes développées par Giua et Bemporad (Giua, Seatzu, 2001a), (Giua, Seatzu, 2001b), (Bemporad, Giua, 2002) dont l’objectif est la recherche de solutions optimales globales ou encore les synthèses de commande dues à (Xu, Antsaklis, 2002a), (Xu, Antsaklis, 2002) utilisant l’optimisation non linéaire. - Dans la solution envisagée par Giua, une partition de l’espace d’état est effectuée, une discontinuité du vecteur d’état pouvant avoir lieu lors des commutations induisant de fait un coût associé. Le principe général de la méthode consiste à identifier des régions de commutation dans l’espace d’état de telle sorte que, lorsque l’état appartient à cette région, on assure une commutation minimisant le critère et optimisant donc les instants de commutation. - Dans l’approche Xu et Antsaklis, la séquence de commutation étant fixée au préalable, il s’agit de déterminer les instants de commutation optimaux, le critère étant la minimisation d’une fonction de coût. le système étudié a la forme suivante :

Habilitation à Diriger des Recherches
71
),( tXfX i=ɺ avec MIif nni ,...,1,: =∈ℜ→ℜ×ℜ (3.1)
Ce système à commutations autonomes se présente sous la forme d’une collection de systèmes non linéaires. L’état est supposé continu lors des changements de configurations. Une séquence de commutation s’écrit :
( ) ( ) ( )( )KK ititit ,,...,,,, 1100=σ (3.2)
où σ exprime que le sous système ki est actif dans [ )1, +kk tt . Partant de l’état initial
00 )( XtX = , le but est alors de trouver les instants de commutation optimaux au sens de la
minimisation d’une fonction de coût qui s’exprime ainsi :
∫+=ft
t
fK dttXLtXttJ0
),())((),...,( 1 ψ avec L le Lagrangien du système (3.3)
Il s’agit d’un problème d’optimisation multi-variables contraint dont la résolution est basée sur un algorithme issu de la méthode du gradient. La fonction de coût à minimiser apparaît alors comme une fonction des instants de commutation. La méthode se déroule en deux temps. Il faut d’abord expliciter le coût optimal connaissant la séquence de commutation. Puis il faut résoudre le problème d’optimisation non linéaire en dérivant le coût pour trouver les instants de commutation optimaux. Cette technique de commande en boucle ouverte s’applique principalement pour l’étude de problèmes d’atteignabilité. L’avantage de cette méthode est qu’elle permet de traiter des problèmes à horizon de temps fini. - D’autres approches directes ont aussi été envisagées (Ababie, 1994), (Holderbaum, 1999) permettant la régulation ou le suivi de trajectoires. Dans le premier cas, un algorithme de commande a été élaboré, d’abord en boucle ouverte puis en boucle fermée, applicable lorsque le système se trouve à l’intérieur d’un domaine de convergence, préalablement déterminé, fonction de l’objectif à atteindre. La démarche a été étendue au cas des systèmes non linéaires. Dans le second cas, l’état des booléens (toujours dans une optique de régulation ou de suivi de trajectoire pour le cas de systèmes non linéaires) est déterminé de telle sorte que l’on minimise l’angle que fait la trajectoire courante dans l’espace d’état avec l’objectif de commande.
• Au sein de l’équipe ASH de SUPELEC, une commande stabilisante basée sur des principes énergétiques a été développée (Buisson, Richard, 2005) s’appliquant pour le cas où les interrupteurs commutent par paire. Le principe est de déterminer une fonction candidate de Lyapunov commune à toutes les configurations valides du système qui va permettre de stabiliser le dit système autour d’un point d’équilibre commun si celui-ci existe ou autour d’une référence admissible dans le cas ou il n’y a pas de point d’équilibre
notée 0X (correspondant par l’objectif de commande). La fonction candidate de
Lyapunov choisie, commune à toutes les configurations, s’écrit

Novembre 2007
72
( ) ( ) ( )0 0 0
1,
2
TV X X X X F X X= − − . Apparentée à la fonction de stockage d’énergie, on
vérifie aisément que ( )0, 0V X X > excepté en 0X X= où ( )0, 0V X X = . Quant à sa
dérivée Vɺ , elle dépend des booléens de commande (représenté par le vecteur ρ ) et au vu
des propriétés de cette fonction il peut toujours être trouvé à tout instant un ρ assurant la
négativité de Vɺ . Différentes stratégies de commandes peuvent être envisagées (commutations minimales, descente maximale,….).
• Un autre type de commande largement utilisé est la commande par mode glissant. Il s’agit comme pour la commande stabilisante évoquée dans le paragraphe précédent d’une commande en boucle fermée à structure variable (Edwards, Spurgeon, 1998). De manière générale, une commande à structure variable se compose d’un ensemble de lois de commande associé à une règle de décision qui permet de sélectionner à chaque instant la loi courante en fonction de l’état du système. Ici, Deux grandes approches peuvent être distinguées, celle consistant à déterminer une loi de commande continue par morceaux pour laquelle la notion de modèle moyen doit être utilisée et la commande directe qui consiste à fournir à tout instant la valeur des booléens de commande. C’est à cette seconde approche que nous nous sommes plus particulièrement intéressés au sein de l’équipe ASH (Richard, Cormerais, 2006). Basé sur le choix d’une fonction candidate de Lyapunov paramétrisée par une matrice de pondération, il peut alors être déduit une stratégie de commande directement booléenne sous la forme d’un retour d’état.
• Enfin, dans le cadre des commandes continues utilisant donc la notion de modèle moyen et nécessitant l’adjonction d’une MLI, on peut citer la commande par passivation initialement développé par R. Ortega et basée sur des notions énergétiques. L’objectif est ici la régulation d’une ou plusieurs grandeurs de sorties. Deux méthodologies peuvent alors se dégager. La première, appelée PBC (Passivity Based Control), consiste à synthétiser le correcteur sous la forme d’un retour d’état dynamique. Le principe est de rendre dissipatif le système en boucle fermé (Sira-Ramirez, Perez-Moreno, 1997), (Ortega, Loria, 1998). Afin d’ajuster les performances du correcteur, des paramètres d’amortissement peuvent être ajoutés. Le principal inconvénient de cette approche est que la stabilité du correcteur n’est pas assurée a priori, elle dépend en effet de la nature des sorties observées. Pour palier cet inconvénient, une extension à la classique commande PBC a vu le jour sous le nom d’IDA-PBC (Interconnection and Damping Assignment Passivity Based Control). Le principe même de la méthode conduit à la détermination d’un correcteur stable mais la contrepartie d’une telle approche est la complexité des calculs qu’elle induit conduisant bien souvent à rendre la méthode inapplicable dès que l’ordre du système est élevé ou le nombre de booléens de commande conséquent (Ortega, Van Der Schaft, 2002). Etant basée sur des principes énergétiques, l’approche de modélisation développée au chapitre 1 permet de formaliser les principes de la commande par passivation conduisant ainsi à une méthode générique et systématique pouvant être

Habilitation à Diriger des Recherches
73
appliquée sur tout type de système (Morvan, Cormerais, 2004b). Ces travaux ont été réalisés au sein de l’équipe ASH et appliqués avec succès sur de nombreux convertisseurs statiques de l’électronique de puissance (Morvan, 2004), (Cormerais, Richard, 2005). Le chapitre 4 est d’ailleurs consacré à la mise en œuvre de cette approche sur un convertisseur multiniveaux série à n cellules. 2. Cas des systèmes à commutations pilotées et/ou autonomes :
• Dans cette catégorie, on peut citer la commande prédictive à temps discret (ou échantillonné) développée par Bemporad. Le modèle utilisé autorise la prise en compte de variables d’état et de commande continues ou discrètes, le champ d’application s’avère donc très général. Le principe consiste à déterminer à un instant donné une séquence de commande sur un horizon fini mais dont seul le premier élément de la séquence optimale est effectivement appliqué au système. A la période d’échantillonnage suivante, une nouvelle séquence de commande est déterminée et ainsi de suite.
• Une autre méthode de commande s’appliquant au cas des systèmes présentant des commutations pilotées et/ou autonomes est la commande optimale développée à partir du Principe du Maximum (Riedinger, 2000), (Riedinger, Iung, 2003). Comme pour la commande prédictive, les variables d’état et de commande considérées peuvent être de deux types : continu ou discret. Le principe du maximum de Pontryagin, énoncé dans le cas des systèmes continus, est étendu au cas des systèmes hybrides, afin d’en déduire des conditions nécessaires que la commande optimale doit vérifier. Dans cette approche, tous les phénomènes dits hybrides, i.e. les discontinuités de modèle telles que les sauts d’état, sont pris en compte. Ceci permet une optimisation globale du critère. Nous ne nous attacherons pas à développer plus avant cette partie puisque jusqu’à aujourd’hui les travaux de recherche auxquels j’ai participé ont eu pour cadre la commande des systèmes dans le cas de commutations pilotées où les interrupteurs commutent par paire. Le reste du chapitre est consacré à la présentation de deux approches de commande dans lesquelles je me suis plus personnellement investi à savoir la commande par mode glissant directe développée par Pierre-Yves Richard et à laquelle j’ai collaboré et la commande par passivation dans le cadre du formalisme bond graph.
2. LA COMMANDE PAR MODE GLISSANT DIRECTE
2.1. Introduction – Modèle utilisé On s’intéresse ici au cas où les interrupteurs du système commutent par paire et où tous les éléments de stockage d’énergie sont en causalité intégrale. Comme énoncé dans l’introduction, il existe deux approches possibles à la commande par mode glissant. La

Novembre 2007
74
première, de type continu par morceaux utilise la notion de modèle moyen. La seconde approche, quant à elle, synthétise de manière directe la loi de commande booléenne à appliquer. C’est à cette seconde approche que nous nous sommes intéressés. Une méthode originale a été développée que nous nous proposons ici de présenter (Richard, Cormerais, 2006). Une équation d’état unique en représentation PCH (Port Control Hamiltonian) peut être déterminée pour le système à commutations. Elle prend la forme classique suivante :
( ) ( )( ) ( )X J R Z G Uρ ρ ρ= − +ɺ (3.4)
Dans la suite, on fera l’hypothèse que les matrices J, R et G sont affines en la commande. Ceci se justifie pleinement dans la mesure où la presque totalité des convertisseurs statiques de l’électronique de puissance (tels que le boost, le buck, les convertisseurs multiniveaux, etc…) possèdent cette propriété. Ceci ne constitue donc pas une hypothèse restrictive. L’équation d’état peut alors être réécrite comme suit :
( ) ( ) ( ) ( )1
, , , ,m
i ii
X f X t g X t f X t g X tρ ρ=
= + = +∑ɺ (3.5)
Quant à l’équation d’observation :
Y D X= où D est une matrice de rang plein de dimension (m,n) (3.6) avec : nX ∈R , mρ ∈R (booléen de commande sous forme vectorielle dont les
composantes sontiρ , : n nf × →R R R et : n n mg ×× →R R R fonctions continues de X.
Enfin, on impose les conditions suivantes sur les dimensions des différents vecteurs. La dimension de l’état (notée n) est supposée supérieure à la dimension de la commande (notée m) qui est égale à la dimension de la sortie, soit :
( )dim( ) dim( ) dimY m X nρ = = ≤ = .
2.2. Les principes de la méthode
2.2.1. Détermination du lieu de glissement Dans le cas d’une régulation, l’objectif de commande s’exprime sous la forme :
0Y Y cte= = (3.7)
Il en résulte qu’une fois cet objectif de commande atteint le système évolue suivant la dynamique zéro du système (la dynamique zéro se définit comme la dynamique imposée au système lorsque l’objectif de commande est atteint) qui est de dimension n-m et qui
constitue donc le lieu de glissement ( )S t vers lequel l’état du système doit évoluer. Il se
définit comme suit :

Habilitation à Diriger des Recherches
75
( ) ( ) , 0nS t X s X t= ∈ =R avec ( ) ( ) ( )1, , , , ,T m
ms X t s X t s X t = ∈ … R (3.8)
P2
P1 Hyperplan de commutation
Hyperplan de commutation
Trajectoire dans l’espace d’état
Lieu de glissement : objectif de commande atteint
Figure 3.1. Commande par mode glissant et hyperplans de commutation
Dans le cadre d’une commande par mode glissant booléenne multivariable, ce lieu de glissement correspond à l’intersection d’autant d’hyperplans de commutations qu’il y a de
booléens de commande (nombre de composantes du vecteur ρ ) soit :
( ) ( )tStS i
m
i 1== ∩ avec ( ) ( ) , 0n
i iS t X s X t= ∈ =R (3.9)
La première condition nécessaire qui doit être établie est la condition d’attractivité vis-à-vis du lieu de glissement soit :
( ) ( ), , 0s X t s X t <ɺ (3.10)
L’objectif de commande se traduit par les deux conditions suivantes :
( ), 0s X t = et ( ), 0s X t =ɺ (3.11)
La première relation exprime le fait que l’état doit atteindre le lieu de glissement et la deuxième le fait que l’état ayant atteint ce lieu de glissement doit y rester.
2.2.2. Notion de commande équivalente Dans la méthode conduisant à l’expression de la commande booléenne, la première étape consiste à déterminer une commande continue équivalente, à valeur dans l’ensemble [0,1], vérifiant la condition exprimée par la relation (11). On trouve alors que :
( ) ( ) ( )1
, , ,eq
s s sX t g X t f X t
X t Xρ
−∂ ∂ ∂ = − +
∂ ∂ ∂ (3.12)
En injectant la relation (3.12) dans l’équation (3.5), on détermine la dynamique correspondant à l’application de la commande équivalente :

Novembre 2007
76
( ) ( ) ( ) ( ) ( )
( )
1 1
, , , , ,
, 0
s s s sX I g X t g X t f X t g X t g X t
X X X t
s X t
− − ∂ ∂ ∂ ∂ = − − ∂ ∂ ∂ ∂
=
ɺ (3.13)
Dans lequel s
X
∂
∂ est une notation condensée pour la matrice jacobienne
,
i
i j j
s s
X X
∂ ∂ =
∂ ∂
Une condition nécessaire à l’existence de cette commande est que ( ),s
g X tX
∂ ∂
soit
inversible ce qui constitue la condition de transversalité. Cette dernière contrainte réduit alors le domaine de glissement à un sous-domaine de s.
2.2.3. Définition d’une fonction candidate de Lyapu nov Afin d’en déduire une commande directement booléenne, on applique la démarche
suivante. Une fonction candidate de Lyapunov de la forme ( ) TV s s W s= est introduite
dans lequel W est une matrice de pondération qui servira de paramètre de réglage pour la
commande. Une expression formelle de ( ),V X tɺ est déterminée fonction de la commande
booléenne ( ),x tρ et de la commande équivalente ( ),eq X tρ .
( ) ( ) ( ) ( ) ( ) 1
2 , , , ,m
Ti i i eq
i
sV t s X t W g X t X t X t
Xρ ρ
=
∂ = − ∂∑ɺ (3.14)
Les variables booléennes ( ),i X tρ évoluant lors du franchissement des hypersurfaces de
commutation, la condition ( ), 0V X t <ɺ permet alors d’en déduire la loi de commande sous
la forme d’un retour d’état du type :
( ) ( ) ( ) 1, 1 sgn , , 1
2T
i i
sX t s X t W g X t i , ,m
Xρ ∂ = − ∀ ∈ ∂
… (3.15)
Comme évoqué pour le cas de la commande stabilisante, plusieurs stratégies peuvent être envisagées :
1. A tout instant, les variables de commande sont choisies de telle sorte que soit
assurée la négativité maximale de ( )V tɺ .
2. La commande n’est modifiée que lorsque qu’on atteint une surface de commutation et dans ce cas les booléens de commande sont choisis afin d’assurer
la négativité de ( )V tɺ .

Habilitation à Diriger des Recherches
77
3. LA COMMANDE PAR PASSIVATION (PBC)
3.1. Introduction La commande par passivation souvent nommée PBC pour « Passivity Based Control » est une commande basée sur des principes énergétiques. Plus précisément, elle utilise les propriétés de dissipation des systèmes physiques. Qualitativement, un système est dissipatif (ou passif) si la puissance stockée au niveau du système reste toujours inférieure à la puissance extérieure fournie. L’idée est donc de prendre en compte ces principes énergétiques afin de synthétiser la loi de commande. L’objectif est d’assurer que le système en boucle fermé soit passif et donc asymptotiquement stable vis-à-vis de l’erreur. Des paramètres d’amortissement servent au réglage du correcteur afin d’ajuster ses performances. (Ortega, Loria, 1998), (Ortega, Van der Schaft, 2002). La commande par passivation contrairement à la commande par mode glissant présentée au §2 est une commande indirecte ou continue utilisant la notion de modèle moyen. Le correcteur se présente sous la forme d’un retour d’état dynamique fournissant des commandes dans le continuum [0,1]. Il convient donc, via l’adjonction d’une MLI, d’en déduire la commande booléenne équivalente (cf. figure 3.2).
Commande Continue
MLI Partie Opérative [ ]1,0∈ir 1,0∈iρ
Partie Commande
correcteur Correcteur Continu :
PBC
Figure 3.2. Schéma de principe de la boucle de commande utilisant un correcteur passif
Le choix de cette commande s’est imposé à nous pour deux raisons principales. Premièrement, bien qu’elle constitue une méthode de commande récente dans le domaine des systèmes à commutations, elle a déjà fait ses preuves et s’est révélée tout à fait efficace dans le domaine de l’électronique de puissance. Deuxièmement, la commande par passivation est basée sur des principes énergétiques or, la méthode de modélisation des systèmes utilisant le formalisme bond graph repose aussi sur des principes énergétiques. Le lien entre cette modélisation et cette commande se fait donc de façon naturelle et directe. Dans les paragraphes qui suivent une approche originale de synthèse de la commande par passivation est présentée. En utilisant une représentation hamiltonienne du modèle moyen du système et en appliquant les résultats du chapitre 1, on peut étendre le principe de la commande par passivation au cas des systèmes représentés sous forme DAE et permettre une approche générique conduisant à la mise en œuvre d’un correcteur sous la forme d’un

Novembre 2007
78
retour d’état dynamique dont la forme dépendra de propriétés structurelles du système directement mises en évidence via l’outil bond graph (Morvan, Cormerais, 2004b).
3.2. Mise en Equation du Système sous Forme Hamilto nienne
3.2.1. Détermination de l’équation d’état Dans le domaine de l’électronique de puissance, et plus précisément des convertisseurs de puissance, les interrupteurs commutent par paires. En utilisant la notion de cellules de commutation et en appliquant les résultats du chapitre 1, §3, on peut donc représenter ce système sous la forme d’une équation d’état unique paramétrée par un booléen de
commande (ici sous forme vectorielle représenté par la variable ρ ).
On rappelle alors que l’équation d’état de ce système s’exprime suivant la forme implicite suivante (cf. relation (1.43) :
US
SHSS
X
X
FFSFFS
FKFK
X
XSI
d
i
dTT
eiT
ei
d
i
++
−−−−=
−
25
351315
1212
12
00 ɺ
ɺ (3.16)
avec :
THSSSK 131311 −= (3.17)
Remarque 1. Les variables de commande du système, qui n’apparaissent pas
explicitement dans (3.17) sont en fait présentes en tant que paramètres des matrices ijS .
Considérons maintenant un vecteur de sortie Y du système dont les composantes correspondent aux variables qu’on souhaite réguler. Le fait qu’il existe des causalités dérivées dans le modèle bond graph implique que l’équation de sortie résultante peut
dépendre de la dérivée temporelle de dX , d’où la forme générale suivante pour Y (cf.
chapitre 1, figures 1.2 et 1.3) :
MUXDCXY di ++= ɺ (3.18)
Reprenant le principe du chapitre 1, §2.2.2, on applique au système représenté par les équations (3.17) et (3.18) le changement de variables définit par la matrice Q suivante :
1
2
i
d
XXQ
XX
=
(3.19)
avec
( )( )
+−+−
=
=
IFFSR
SFFSRSI
IQ
SQQ
Tei
T
Tei
T
12
121212
21
1211 (3.20)

Habilitation à Diriger des Recherches
79
et
( ) 1
12121212
−+++= deTT
eiT FFSSFSFSR (3.21)
On aboutit alors à une équation d’état générique sous forme explicite :
( ) ( ) ( )( )
( )( )URSSSRSFFKSHSS
XFFSRSFFSRSFFKFKX
b
b
B
ie
A
Tei
TTei
Tiei
ɺ
ɺɺ
25122512351315
12121212
−++++
++++−=
(3.22)
Dans lequel 1X X= (notation conservée pour la suite de ce paragraphe)
L’équation d’observation s’écrit :
[ ][ ]UBDQSRRSSM
UDRSXQDADQCQY
b
b
21252512
25212111
++++
+++=ɺ
ɺɺ (3.23)
Les équations (3.22) et (3.23) qui représentent l’équation d’état et d’observation pour le système exact peuvent aussi être interprétées comme les équations d’état et d’observation du modèle moyen, les variables de commande devant alors être considérées comme continues et appartenant à l’ensemble [0,1]. L’existence d’un modèle moyen associé au système à commutations représenté par
l’équation d’état (3.22) nécessite que la matrice 12S soit indépendante de ρ . En effet, si
ce n’était pas le cas, X pourrait présenter des discontinuités à la commutation, et doncXɺ
ne serait pas borné. Nous allons donc considérer dans la suite que 12S est constante.
Comme pour la commande par mode glissant, on impose les conditions suivantes sur les dimensions des différents vecteurs. La dimension de l’état (notée n) est supposée supérieure à la dimension de la commande (notée m) qui est égale à la dimension de la
sortie, soit : ( )dim( ) dim( ) dimY m X nρ = = ≤ = .
3.2.2. Mise sous forme hamiltonienne Etablissons maintenant le lien avec le formalisme hamiltonien. D’une manière générale, la représentation matricielle du modèle d’état moyen d’un système à commutations dans une formulation PCH standard, a la forme suivante (Van der Schaft, 1999) :
( ) ( )[ ] ( ) ( )EXGX
XHRXJX a
a ρρρ ,, +∂
∂−=ɺ (3.24)
avec X le vecteur d’état du modèle moyen
ρ les variables de commande
J la matrice d’interconnexion anti-symétrique

Novembre 2007
80
aR la matrice de dissipation symétrique
aH l’énergie stockée dans le système
G la matrice des entrées de puissance, E les entrées de puissance
aH et les matrices GRJ a ,, peuvent dépendre de ρ .
Puisque 12S est indépendante de ρ , l’équation (3.22) peut être interprétée comme le
modèle d’état moyen du système, les variables ρ étant continues dans l’ensemble [ ]1,0 .
( ) ( ) ( )[ ]
( )[ ]URSSFFKHSSS
XFFSRSFFFHSSSX
c
b
B
ie
F
Tei
Tiei
T
ɺ
2512351315
1212131311
++++
++−−=
(3.25)
11S étant une matrice anti-symétrique, elle peut être considérée comme un terme
d’interconnexion d’un point de vue PCH. Par contre, la matrice H et donc le terme THSS 1313 , ne sont pas symétriques dans le cas général (sauf si 033 =S ). En conséquence, il
est nécessaire de séparer ce terme en deux parties : une partie symétrique symH , et une
partie anti-symétrique asymH . Ceci va nous permettre de les identifier respectivement à un
terme de dissipation et à un terme d’interconnexion. L’équation d’état (3.25) devient donc:
( )[ ] UBXFSHSSHSSX cbT
symT
asym +−−= 1313131311ɺ (3.26)
L’identification entre les relations (3.24) et (3.26) donne (Morvan, 2004) :
( ) ( )
( ) UEBGXFX
H
SHSRSHSSJ
cba
Tsyma
Tasym
==≡∂
∂
=−=
ρ
ρρ 1313131311
(3.27)
3.3. Synthèse du correcteur PBC Dans ce paragraphe sont exposées d’une manière synthétique et générique les différentes étapes permettant d’aboutir à l’expression du correcteur passif sous la forme d’un retour d’état dynamique. En partant de la formulation PCH du modèle, l’objectif de commande que nous nous fixons est de faire en sorte que les variables d’observation définies par (3.23) suivent une référence prédéfinie :
0Y Y= (3.28)

Habilitation à Diriger des Recherches
81
3.3.1. Etape 1 : Définition d’un vecteur erreur En premier lieu, est introduite la notion de vecteur erreur Xɶ (Sira-Ramirez et al., 1997) avec :
0X X X= −ɶ (3.29)
Par définition, 0X est un vecteur dépendant à la fois de la référence 0Y et de la commande
ρ, qui coïncide avec le vecteur d’état quand l’objectif de commande est atteint.
La réécriture de l’équation d’état sous forme hamiltonienne en utilisant 0X X X= −ɶ
donne :
( ) ( )( ) ( ) ( )( ) 0a c aX J R F X G E X J R F Xρ ρ ρ ρ − − = − − − ɺɶ ɶ ɺ (3.30)
3.3.2. Etape 2 : Injection d’amortissement Le principe de la commande par passivation est d’injecter de l’amortissement sous la
forme d’une matrice 1R ( 1 0R > ) au niveau de l’équation d’état définie par le vecteur
erreur. Ainsi, l’équation (3.30) devient :
( ) ( )( )( )( ) ( ) ( )( )
1
0 0 1
a
a
X J R R F X
G E X J R F X R F X
ρ ρ
ρ ρ ρ
ψ
− − + =
− − − −
ɺɶ ɶ
ɺ ɶ
(3.31)
Le terme de droite de cette équation doit être nul ( 0ψ = ) afin d’assurer à ce système un
comportement asymptotiquement stable. Il en résulte alors la condition suivante : ( ) ( ) ( ) ( )0 0 1 0aX J R F X R F X X G Eρ ρ ρ − − − − =
ɺ (3.32)
3.3.3. Etape 3 : Détermination du correcteur passif et étude de la stabilité
Les équations (3.28) et (3.32) permettent de définir la dynamique du correcteur sous une
forme implicite comme l’exprime la relation (3.33). On a un système de m n+ équations à
m n+ inconnues (la commande ρ et l’état 0X ) :
( ) ( )( ) ( )1 100
0
0 0
0 0 0 0 1a
XJ R R FI R F GX
X EC
Y
ρ ρ ρρ
− − = + −
ɺ
ɺ (3.33)
Quand l’objectif de commande est atteint, i.e. lorsque X converge asymptotiquement vers
0X , il apparait que la dynamique du correcteur passif (cf. relation (3.33)) tend vers la
dynamique zéro du système initial. En conséquence, la stabilité du correcteur est équivalente à celle de la dynamique zéro du système à contrôler.

Novembre 2007
82
Dans le cas général, l’intégration de (3.33) conduit à une expression pour la commande du
type ( )1, ,g X Rρ ρ= ɶɺ . En injectant cette équation dans le membre de gauche de l’équation
(3.31) avec 0=ψ on aboutit à la représentation d’état suivante vis-à-vis de l’erreur :
( ) ( )( )( )1 0aX J R R F Xρ ρ− − + =ɺɶ ɶ (3.34)
Il s’agit, dans le cas général, d’une équation différentielle en X~
non linéaire. Si on considère la linéarisation de (3.34) autour du point de fonctionnement satisfaisant
l’objectif de commande ( 0X =ɶ ), les valeurs propres de la matrice de ce système linéarisé doivent être à partie réelle strictement négative afin d’assurer la stabilité asymptotique. La
matrice 1R joue donc le rôle de paramètre de réglage permettant d’assurer cette condition
et d’ajuster les performances du système en terme de temps de réponse ou de dépassement.
Remarque 2. Si ( ) ( )dim dimX Y= , la dynamique zéro étant réduite à un point, le
correcteur s’écrit sous la forme d’un retour d’état statique (la question de sa stabilité ne se pose donc plus). Remarque 3. La commande par passivation est une approche continue utilisant la notion de modèle moyen. La résolution de l’équation (3.33) ne permettant pas d’assurer aux
variables de commande d’appartenir au continuum[ ]0,1 , une solution élémentaire consiste
à ajouter des blocs saturation en sortie du correcteur passif. La seconde approche consiste à ajuster les paramètres d’amortissement afin de satisfaire la contrainte de non saturation mais cela conduit à des performances moindres pour le correcteur (en comparaison avec la première solution).
4. CONCLUSION
Dans ce chapitre, l’accent a été mis sur deux types de commande : la commande par mode glissant directe et la commande par passivation qui utilise la notion de modèle moyen et nécessite donc l’adjonction d’une MLI. Si les méthodologies diffèrent, ces deux méthodes présentent néanmoins des points communs. Elles sont en effet toutes deux basées sur une approche énergétique et utilisent des concepts liés à la stabilité des systèmes. D’autres part, ces commandes ont été appliquées avec succès sur différents convertisseurs DC-DC (boost, multiniveaux,….) (Beccuti, Papafotiou, 2007), (Richard, Cormerais, 2006), (Morvan, Cormerais, 2003). Reste maintenant à étendre leur domaine d’application au cas de la poursuite de trajectoire et au cas des systèmes de l’électronique de puissance présentant des fonctionnements de type DCM (Discontinuous Conduction Mode). En

Habilitation à Diriger des Recherches
83
particulier se posera, concernant la commande par passivation, la question de l’extension de la validité du modèle moyen pour ce type de système.

Novembre 2007
84

Habilitation à Diriger des Recherches
85
CHAPITRE 4
Cas du Convertisseur multiniveaux série à n cellules 1. INTRODUCTION
Les convertisseurs multiniveaux sont apparus pour palier les inconvénients des structures classiques (type boost, buck, buck-boost, etc,….). Ils permettent en effet de réduire la tension aux bornes des interrupteurs. Quant à la forme d’onde de la tension aux bornes de la charge elle est directement liée au nombre de cellules, la discrétisation étant d’autant plus fine que le nombre de cellules est élevée. La contrepartie est que la commande d’un tel système s’avère alors plus complexe. Le but de ce chapitre est de montrer comment la notion de cellules de commutation associée au formalisme bond graph permet de déduire une équation d’état unique paramétrée par les booléens de commande pour un convertisseur multiniveaux série à n cellules. Dans une seconde partie, on déduira l’équation générique d’un correcteur basé sur les principes de la commande par passivation. Enfin une application sur un convertisseur multiniveaux série à trois cellules illustrera notre propos.
2. DESCRIPTION DU SYSTEME
La figure 4.1 représente le circuit électrique d’un convertisseur multiniveaux série à n cellules dans lequel on peut faire apparaitre les différentes cellules du point de vue électrique. Dans les conditions normales de fonctionnement, les interrupteurs d’une même cellule n’étant jamais dans le même état, ils commutent donc nécessairement par paire.
Ti_u
Ti_d
Ci
nième cellule i ième cellule 1ière cellule
E
T1_u
T1_d
C1
Tn_u
Tn_d
L1
R1
Figure 4.1. Schéma électrique du convertisseur série multiniveaux à n cellules

Novembre 2007
86
Un booléen de commande iρ est associé à chaque cellule électrique. Lorsque 1iρ = ,
l’interrupteur _i uT est fermé et l’interrupteur _i dT est ouvert. La notion de cellule de
commutation (cf. chapitre1 §3) peut alors être utilisée pour déterminer un bond graph équivalent à causalité unique dans lequel les interrupteurs ne sont plus modélisés par des sources mais par des transformateurs ou des gyrateurs à coefficients variables, les entrées de commande booléennes du système original devenant les coefficients de ces nouveaux éléments.
3. DETERMINATION DE L’EQUATION D’ETAT GENERIQUE
3.1. Détermination du bond graph causal dans une configuration donnée
Du schéma de la figure 4.1, on déduit le bond graph acausal par application de la méthode générique (Karnopp, Margolis, 1990). La figure 4.2 représente le bond graph causal du
système dans la configuration où les interrupteurs _i uT sont en causalité source d’effort
(SE) et les interrupteurs _i dT en causalité source de flux (SF) (avec i variant de 1 à n). Au
vu des configurations autorisées pour ce système et conformément à la définition du chapitre1 §3.2, n cellules de commutation peuvent être déterminées telles que définie figure 4.2.
Cellule Cn ou Cellule Charge Cellule Ci
L
0 1 0 1
0
1
1
0
R Se : E
1
1
0 1
1
Cellule C1 ou Cellule Source
1,1
1,0
i,1
i,0
n-1,1 nL
n nR
n-1,0
2
i Ci
i-1,1
i-1,0
Sw : Ti_u Sw : T1_u
C1 1
Sw : T1_d Sw : Ti_d
Sw : Tn_u
Sw : Tn_d
Figure 4.2. Bond graph causal et cellules de commutation
3.2. Détermination des relations d’entrées/sorties associées à chaque cellule
Trois types de cellules peuvent être isolées :

Habilitation à Diriger des Recherches
87
• La cellule source (pour 1i = )
• La cellule interne (pour 2 1i à n= − )
• La cellule charge (pour i n= ) Les efforts/flux associés aux liens d’entrées/sorties de chaque cellule de commutation
définissent respectivement les vecteurs d’entrées inS et de sorties outS de ladite cellule. On
en déduit pour chaque cellule une relation générale d’entrées/sorties dépendant du booléen de commande associé. Tous calculs faits, on trouve les résultats suivants :
Relation d’entrées/sorties de la cellule 1C appelée aussi cellule source :
1 11 1
2 21 1
1,1 1,11 1
1,0 1,01 1
0 0 1
0 0
1 0 0
0 0
f e
f e
e f
e f
ρ ρρ ρ
ρ ρρ ρ
− = − −
(4.1)
Relation d’entrées/sorties de la ième cellule de commutation (avec i variant de 2 à n-1) :
1,1 1,1
1,0 1,0
,1 ,1
,0 ,0
0 0 0 1
0 0 0
0 0 0 1 1
1 1 0 0
1 0 0
i ii i
i ii i
i ii i
i ii i i
i ii i i
f e
f e
f e
e f
e f
ρ ρρ ρ
ρ ρρ ρ ρ
ρ ρ ρ
− −
− −
− = − − − −
− −
(4.2)
Relation d’entrées/sorties de la cellule Cn appelée aussi cellule charge :
1,1 1,1
1,0 1,0
0 0
0 0 1
1 0
n n n
n n n
n n n n
f e
f e
e f
ρρ
ρ ρ
− −
− −
= − −
(4.3)
Une représentation équivalente au bond graph de la figure 4.2 peut donc être donnée par la structure suivante dans laquelle les blocs 1 à n figurent les relations d’entrées/sorties des
cellules de commutation 1C à nC :
2
1
nL
Se
(1)
C1
1
11
10
(i)
R
L
nR
C2
i
2k
3k
(n)
5
i-1,i
i-1,0
4i
5i
Figure 4.3. Bond graph causal équivalent

Novembre 2007
88
3.3. Détermination de la relation d’entrées/sorties générale – Equation d’état générique
Les relations d’entrées/sorties de chaque cellule de commutation ayant été déterminées, (cf. équations (4.1) à (4.3)), il ne reste plus qu’à les agréger afin d’en déduire la relation d’entrée/sortie globale qui permet de déterminer l’équation d’état du système par insertion des relations constitutives des éléments résistifs et de stockage d’énergie du système.
Au vu de la causalité du bond graph de la figure 4.3, cela revient à déterminer les flux 1f ,
if (pour i variant de 2 à n-1) , nRf et l’effort nLe comme des fonctions des efforts 1e , ie
(avec i variant de 2 à n-1), nRe , du flux nLf et des booléens de commandejρ (avec j
variant de 1 à n)
• Détermination de 1f
La première ligne de (4.1) permet d’écrire
( )1 1 11 1 101f f fρ ρ= − − + (4.4)
Des lignes 2 et 3 de (4.2), on trouve que :
1,1 2,12 2
1,0 2,02 21 1
f f
f f
ρ ρρ ρ
= − − (4.5)
Propriété 1.
,1 1,01 1
,0 1,11 11 1i ni i
i ni i
f f
f f
ρ ρρ ρ
−+ +
−+ +
= − −
(4.6)
Démonstration D’une manière générale, si on considère la ième cellule, on a la relation suivante :
1,1 1,0
,0 1,11 1 1
nj ji n
j ji nj i
f f
f f
ρ ρρ ρ
−−
−= +
= − −
∏
Or on a la propriété remarquable suivante :
11 1
1 1 11 1 1 1
nj j i i
j jj i i i
ρ ρ ρ ρρ ρ ρ ρ
−+ +
= + + +
= − − − −
∏
On en déduit donc la relation (4.6). En utilisant (4.6) pour 1i = et sachant que n nLf f= , on trouve en définitive que :
( )1 1 2nLf f ρ ρ= − (4.7)

Habilitation à Diriger des Recherches
89
• Détermination de if
La première ligne de (4.2) permet d’écrire :
( ) ,1 ,01i i i i if f fρ ρ= − + (4.8)
D’après (4.6)
( ) ( ) ( )( )1 1,0 1,1 1 1,0 1,11 1i i i n n i i n nf f f f fρ ρ ρ ρ+ − − + − −= − + + − + (4.9)
D’après (4.3), on trouve que :
1,0 1,1n n nLf f f− −+ = (4.10)
D’où en définitive :
( )1i i i nLf fρ ρ += − (4.11)
• Détermination de nRf
D’après le bond graph de la figure 4.2, on trouve directement que :
nR nLf f= (4.12)
• Détermination de nLe
Pour le problème considéré, Aucun élément n’étant en causalité dérivée, la forme standard implicite s’écrit donc
11 13 15
13 33 35
0
0in
Tout
Z
S S SI DX
S S I S D
U
= − −
ɺ (4.13)
avec
1
1n
nL
q
Xq
p−
=
⋮,
1
1n
nL
e
Ze
f−
=
⋮, ( )in nRD e= , ( )out nRD f= et ( )2U e= (4.14)-( 4.18)
La forme la plus générale de nLe s’écrit : 1
21
n
nL i i n nL r nR si
e e f e eα α α α−
== + + +∑ (4.19)
Les relations (4.7) et (4.11) déterminent les n-1 premières lignes de 11S et 11S étant une
matrice anti symétrique, on en déduit donc la valeur des coefficients 1α à nα de la relation
(4.19). Pour i variant de 1 à n-1, 1i i iα ρ ρ+= − et 0nα = . Reste donc à déterminer rα et
sα . Ceci s’effectue directement à partir du bond graph de la figure 4.2, on en déduit que :
1rα = − et 1sα ρ= .

Novembre 2007
90
D’où :
( )1
1 1 21
n
nL i i i nRi
e e e eρ ρ ρ−
+=
= − − +∑ (4.20)
Les relations (4.7), (4.11), (4.12) et (4.20) permettent de déterminer les matrices ijS et
donc la forme standard implicite du convertisseur multiniveaux série à n cellules. On obtient en définitive :
1
2 1
111
1 1 2 1
0 0 0 0 1
0 0 0 0
0 0 0 0
0 0 0 0 1
1 1 0
s
k k
k c
s k k k c
S
ρ ρρ ρ
ρ ρρ ρ
ρ ρ ρ ρ ρ ρ ρ ρ
−
−
+ − −
= − − − − − − − − −
⋯
⋯
⋮ ⋮ ⋮⋮⋮ ⋮ ⋮ ⋮
⋯
⋯
⋯
(4.21)
13
0
0
1
S
= −
⋮ , 15
0
0
s
S
ρ
=
⋮ (4.22)-( 4.23)
Les matrices 33S et 35S sont nulles.
On en déduit l’équation d’état générique valable pour tous les modes valides par insertion des relations constitutives sur les éléments de stockage d’énergie (matrice F) et les éléments résistifs (matrice R). Dans notre cas :
1
2
1
1 0 0 0
10 0 0
10 0
1n
C
CF
C
L
−
=
⋯
⋯
⋮ ⋮ ⋮ ⋮
⋯
( )H R= (4.24)-( 4.25)
Au final, on obtient donc comme équation d’état générique pour le convertisseur multiniveaux série à n cellules :
1 2
1 1
11 1
112 1
1 1
0 00
0 0 0n nn n
nL nLn n
n
Lq q
dE
q qd tL
p pR
C C L
ρ ρ
ρ ρ
ρρ ρρ ρ
−− −
−
−
−
= +−
−− −
⋯
⋮ ⋮ ⋮⋮ ⋮ ⋮
⋯
⋯
(4.26)

Habilitation à Diriger des Recherches
91
4. DETERMINATION DE LA COMMANDE PAR PASSIVATION
4.1. Objectif de Commande – Mise sous Forme PCH L’objectif de commande est de réguler à une valeur constante les tensions aux bornes des condensateurs et le courant dans la charge. Pour le système, l’équation d’observation s’écrit donc :
1
1
10 0
0
10
10 0
n
C
Y X
C
L
−
=
⋯
⋱ ⋱ ⋮
⋮ ⋱
⋯
(4.27)
Et l’objectif de commande :
0Y Y= avec
10
010
0
n
Vc
YVc
I−
=
⋮ (4.28)
Dans un premier temps l’équation d’état (4.26) doit être réécrite sous forme PCH i.e. sous la forme :
( ) ( ) ( ) ( ),ta
H XX J R G E
X
ρρ ρ ρ
∂ = − + ∂
ɺ (4.29)
Pour ce faire on utilise les résultats du chapitre 2 §5.2. Les relations d’identification
(3.27) permettent de déterminer les matrices J , aR , F et G . Tout calcul fait, on trouve :
( )1 2
1
2 1 1
0 0
0 0
0n n
n n
J
ρ ρ
ρρ ρ
ρ ρ ρ ρ−
−
− = − − −
⋯
⋮ ⋮ ⋮
⋯
⋯
(4.30)
0 0 0
0
0 0 0
0 0 0
aR
R
=
⋯
⋮ ⋮
⋯,
1
1
10 0
0
10
10 0
n
C
F
C
L
−
=
⋯
⋱ ⋱ ⋮
⋮ ⋱
⋯
et ( )
1
0
0G ρ
ρ
=
⋮ (4.31)-( 4.33)

Novembre 2007
92
4.2. Synthèse du correcteur passif On reprend ici les étapes décrites chapitre 3 §3.3.
4.2.1. Etape 1 : Détermination du vecteur erreur
L’objectif de commande
10
010
0
n
Vc
YVc
I−
=
⋮ étant atteint, cela fixe complètement le vecteur
d’état qui s’écrit
10
020
0
C
C
L
q
Xq
p
=
⋮, quant au vecteur erreur, on a :
1 10
1 20
0
C C
C C
L L
q q
Xq q
p p
− = − −
⋮ɶ . La
dynamique zéro du système étant réduite à un point, le contrôleur s’exprimera donc sous la forme d’un retour d’état statique (cf. chapitre 3 remarque 2).
4.2.2. Etape 2 : Injection d’amortissement et déter mination du contrôleur sous forme implicite
Conformément à l’équation (3.33), la relation (4.26) est réécrite en fonction de Xɶ , de 0X
et des coefficients d’amortissement (1ε à nε ) sont ajoutés sur les différentes composantes
du vecteur d’état. Ce sont ces coefficients qui serviront de paramètres de réglage pour ajuster les performances du correcteur. La relation (4.34) représente, sous une forme implicite, l’expression générale du correcteur passif dans le cas d’un convertisseur multiniveaux série à n cellules.
11 2 10
1 20
12 1 1 0
11
1
10 0
0 0 0 0 00
01
0 0 0 0 0 0
0 0 0 01
0 0
10 0
0 00
0
0 0
0 0 0
C
n n C
nn n L
n
n
Cq
qC
pR
L
C
ρ ρ
ρ ρρ ρ ρ ρ
ε
εε
−−
−
−
− − − − −
+
⋯
⋯ ⋯⋱ ⋱ ⋮
⋮ ⋮ ⋮ ⋮⋮ ⋮
⋯ ⋯ ⋮ ⋱
⋯
⋯
⋯
⋯⋱ ⋱
⋮ ⋮
⋯
1 10
1 20
10 1
0
0 (4.34)100
10 0
C C
C C
nL L
q q
Eq q
Cp p
L
ρ−
− + = − −
⋮⋮ ⋮
⋮ ⋱
⋯

Habilitation à Diriger des Recherches
93
Comme 0X ne dépend pas de ρ , 0 0d X
dt= . C’est pourquoi l’équation du correcteur sera
sous la forme d’un retour d’état statique et non dynamique.
4.2.3. Etape 3 : Détermination du correcteur L’équation (4.34) forme un système de m équations à m inconnues (les variables de commandes). La solution explicite issue de (4.34) fournit alors l’équation du correcteur par passivation sous la forme d’un retour d’état statique. Dans le cas du convertisseur multicellulaire série à trois cellules, on obtient les relations suivantes :
( )
( ) ( )
1 1_ 10
1 0 11 0
2 2_ 20
2 3 02 0
1
1
C C C C
LL
C C C C
L LL
q q qR Lp
E L C p
q q q Lp p
E C p
ρ ε
ε ε
− = − +
− − − −
(4.35)
1 102 1 1
1 0
C C
L
q q L
C pρ ε ρ−= + (4.36)
2 203 2 2
2 0
C C
L
q q L
C pρ ε ρ−= + (4.37)
5. APPLICATION AU CONVERTISSEUR SERIE A TROIS CELLULES
5.1. Description de la simulation Pour clore ce chapitre, nous appliquons le contrôleur précédemment déterminé sur un convertisseur multiniveaux série à trois cellules dont les paramètres physiques ont
respectivement pour valeurs : 1200E V= , 1 2 40C C Fµ= = , 10R = Ω et 1L mH= .
L’objectif de commande est de réguler en permanence le courant dans la charge et les tensions aux bornes des capacités aux valeurs suivantes :
0 100Li A= (4.38)
10
2
3CV E= et
20
1
3CV E= (4.39)
Afin d’évaluer les performances et la robustesse du correcteur passif réalisé, deux scénarios différents sont proposés :
1. Démarrage du convertisseur : A partir de l’état initial nul, l’objectif est de réguler la tension aux bornes des capacités et le courant dans la charge aux valeurs de références précédemment citées.

Novembre 2007
94
2. Variation de la tension d’alimentation : L’objectif de régulation étant toujours le même sur le courant dans la charge et les tensions aux bornes des capacités, on se propose de réaliser la simulation suivante : le convertisseur étant dans son état de régime permanent, une variation de tension d’alimentation de type échelon faisant passer la tension de 1500 à 1200 V est
appliqué à 0,002t s= puis un autre échelon faisant passer la tension
d’alimentation de 1200 à 1800 V est appliqué à 0,004t s= . On supposera bien
évidemment avoir accès à la mesure de la tension d’alimentation. Une simulation sous Matlab/Simulink a été réalisée. Les paramètres d’amortissement du
correcteur passif ont pour valeurs 1 2 1ε ε= = et 3 2ε = Deux types de MLI ont été testées
à une fréquence de 10F kHz= . Dans la MLI de type 1 le même signal triangulaire est
envoyé sur les trois composantes du vecteur de commande. Dans la MLI de type 2, les signaux triangulaires sont déphasés deux à deux d’un tiers de la période MLI.
5.2. Résultats de Simulation – MLI de type 1
5.2.1. Introduction Les paragraphes qui suivent présentent les résultats de simulations obtenus pour les deux types de scénarios présentés ci-dessus avec la MLI de type 1. Une étude du comportement du système et des performances du correcteur est effectuée à partir de l’analyse des courbes du courant dans la charge, des tensions aux bornes des capacités et des booléens de commande. Remarque 1. Pour une grandeur donnée, on appelle dépassement, durant la période transitoire, l’écart maximal en valeur absolue par rapport à la valeur de référence (cf. relations (4.38) et (4.39)).
5.2.2. Démarrage du Convertisseur
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
x 10-3
0
20
40
60
80
100
120
140
t
Cou
rant
dan
s la
Cha
rge
: I L
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
x 10-3
0
200
400
600
800
1000
1200
t
Ten
sion
Cap
acité
s: V
C1,
VC
2
Figure 4.4. Courant dans la charge et tensions aux bornes des capacités

Habilitation à Diriger des Recherches
95
Analyse du courant dans la charge : Durant le transitoire, le dépassement observé est de 20%. Une fois le régime permanent
établi, à partir de 0.8rt ms= , on observe un cycle limite à la fréquence de la MLI,
d’amplitude 18%, autour d’une valeur moyenne égale à 0Li . En valeur moyenne l’erreur
statique est donc nulle (cf. figure 4.4). Analyse des tensions aux bornes des capacités :
Le régime permanent est établi à partir de 0.7rt ms= . Aucun dépassement n’est observé.
L’erreur statique est nulle en valeur moyenne comme en valeur instantanée. Ce résultat s’explique par le fait que la MLI de type 1, une fois le régime permanent atteint (cycle limite établi), envoie le même signal triangulaire afin de générer les trois booléens de commande. Une fois les valeurs de référence atteintes pour les deux tensions, le cycle limité observé constitué de deux configurations correspond du point de vue de la
commande à l’enchainement des booléens de commande 000
ρ =
et 111
ρ =
. Ainsi, les
capacités ne peuvent ni se charger ni se décharger, c’est pourquoi les tensions à leurs bornes restent constantes.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
x 10-3
0
0.5
1
Figure 4.5. Booléens de commande
5.2.3. Variation de la tension d’alimentation Analyse du courant dans la charge : Lors des variations de la tension d’alimentation, après un transitoire très court (quelques dixièmes de millisecondes), le régime permanent s’établi de nouveau. L’amplitude du cycle limite est d’autant plus importante que la valeur de E est grande (amplitude de 9%
autour de la valeur moyenne avec 1200E V= , de 20% avec 1800E V= ) et l’erreur
statique est toujours nulle en valeur moyenne (cf. figure 4.6).

Novembre 2007
96
Analyse des tensions aux bornes des capacités : Comme pour le courant dans la charge, après un transitoire très court (quelques dixièmes de millisecondes), une fois le régime permanent établi, l’erreur statique est nulle en valeur moyenne comme en valeur instantanée.
0 1 2 3 4 5 6
x 10-3
0
20
40
60
80
100
120
140
t
Cou
rant
dan
s la
Cha
rge
: I L
0 1 2 3 4 5 6
x 10-3
0
200
400
600
800
1000
1200
1400
tT
ensi
on C
apac
ités:
VC
1, V
C2
Figure 4.6. Courant dans la charge et tensions aux bornes des capacités
0 1 2 3 4 5 6
x 10-3
0
0.5
1
Figure 4.7. Booléens de commande
5.3. Résultats de Simulation – MLI de type 2 5.3.1. Introduction Les paragraphes qui suivent présentent les résultats de simulations obtenus pour les deux types de scénarios présentés ci-dessus avec la MLI de type 2. Une étude du comportement du système et des performances du correcteur est effectuée à partir de l’analyse des courbes du courant dans la charge, des tensions aux bornes des capacités et des booléens de commande.

Habilitation à Diriger des Recherches
97
5.3.2. Démarrage du Convertisseur Analyse du courant dans la charge : Comme précédemment, durant le transitoire, le dépassement observé est de 20%. Mais
une fois le régime permanent établi, à partir de 0.8rt ms= , on observe maintenant un
cycle limite à la fréquence de la MLI dont les amplitudes sont considérablement réduites (moins de 0,5%). En valeur moyenne, l’erreur statique est nulle (cf. figure 4.8). Analyse des tensions aux bornes des capacités : Durant le régime transitoire, aucun dépassement n’est observé. Le régime permanent
s’établit à partir de 0.7rt ms= . L’amplitude du cycle limite est de 5% que ce soit pour
1CV ou 2CV . L’erreur statique est nulle en valeur moyenne.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
x 10-3
0
20
40
60
80
100
120
t
Cou
rant
dan
s la
Cha
rge
: I L
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
x 10-3
-200
0
200
400
600
800
1000
1200
t
Ten
sion
Cap
acité
s: V
C1,
VC
2
Figure 4.8. Courant dans la charge et tensions aux bornes des capacités
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
x 10-3
0
0.5
1
Figure 4.9. Booléens de commande

Novembre 2007
98
5.3.3. Variation de la tension d’alimentation Analyse du courant dans la charge : Lors des variations de la tension d’alimentation, après un transitoire très court (quelques dixièmes de millisecondes) où l’on observe un dépassement inférieur à 10%, le régime permanent s’établi de nouveau. L’amplitude du cycle limite la plus importante est observée pour la valeur de E le plus grande mais elle n’excède pas 2% et l’erreur statique est toujours nulle en valeur moyenne. Analyse des tensions aux bornes des capacités : Comme pour le courant dans la charge, après un transitoire très court (quelques dixièmes de millisecondes) n’entraînant aucun dépassement, le régime permanent est établi. L’amplitude du cycle limite, qui reste inférieure à 4%, est d’autant plus importante que la valeur de E est grande et l’erreur statique est toujours nulle en valeur moyenne.
0 1 2 3 4 5 6
x 10-3
0
20
40
60
80
100
120
t
Cou
rant
dan
s la
Cha
rge
: I L
0 1 2 3 4 5 6
x 10-3
-200
0
200
400
600
800
1000
1200
1400
t
Ten
sion
Cap
acité
s: V
C1,
VC
2
Figure 4.10. Courant dans la charge et tensions aux bornes des capacités
0 1 2 3 4 5 6
x 10-3
0
0.5
1
Figure 4.11. Booléens de commande

Habilitation à Diriger des Recherches
99
6. CONCLUSION
L’exemple développé dans ce chapitre, qui concerne un convertisseur multiniveaux série à n cellules, a permis de mettre en avant tout l’intérêt de l’approche de modélisation développée au chapitre 1 qui, par la notion de cellule de commutation, permet d’établir une équation générique quel que soit le nombre de cellules. Une telle démarche pourrait d’ailleurs être appliquée sur d’autres structures de convertisseurs multiniveaux (parallèle par exemple). A partir des équations d’état et d’observation générales, il a alors été possible de synthétiser un correcteur passif dont les performances en simulations ont été testées dans le cas du convertisseur à trois cellules. Il s’avère alors que quelle que soit la MLI utilisée, le correcteur se montre robuste par rapport aux variations de tension d’alimentation et permet une régulation sur le courant dans la charge et les tensions aux bornes des capacités avec une erreur statique nulle en valeur moyenne. Le but étant de réduire au maximum les oscillations observées en régime permanent pour le courant dans la charge, on préférera donc associer le correcteur passif à la MLI de type 2.

Novembre 2007
100

Habilitation à Diriger des Recherches
101
CHAPITRE 5
Perspectives – Nouveaux Axes de Recherches Les commandes mises en jeux dans les systèmes à commutations conduisent le plus souvent à l’établissement de cycles limites et ce quelle que soit la stratégie utilisée (mode glissant, commande stabilisante, commande par passivation ou autres,….). Dès lors se pose le problème de l’existence et de la stabilité de ces cycles limites. De nombreux travaux existent dans ce domaine s’appuyant sur des principes issus de l’étude des systèmes complexes non linéaires tels que les sections de Poincaré qui permettent de transformer un problème continu en un problème échantillonné et la notion de matrice de sensibilité dont l’analyse des valeurs propres permet de conclure sur la stabilité du cycle limite (Hiskens, Pai, 2000), (Rubensson, Lennartson, 1998), (Girard, 2003). D’autres méthodes encore utilisent le formalisme de l’automate hybride et permettent de conclure sur l’existence de cycles limites. La solution est alors calculée de manière récursive par une méthode de Newton. Actuellement, ce thème fait l’objet d’une recherche au sein de l’équipe ASH à travers la thèse de Mihai Bâja que je co-encadre. Le problème consiste à voir comment le formalisme de modélisation que nous avons développé pour les systèmes physiques à commutations, basé sur des concepts énergétiques, peut contribuer à faire apparaitre des principes génériques conduisant à une méthodologie plus simple et plus générale dans l’élaboration de la solution de tels problèmes. L’autre enjeu de taille est d’étendre les principes de la commande des systèmes physiques à commutations aux cas des systèmes présentant des commutations autonomes et ou pilotées. Dans le cas de l’électronique de puissance, qui est notre domaine d’application privilégié et pour des convertisseurs contenant des interrupteurs totalement commandés, des thyristors ou des diodes, les changements de configurations du système peuvent résulter du changement d’une grandeur booléenne externe provoquant de fait une commutation d’interrupteurs par paire ou être du au changement d’état d’une diode ou d’un thyristor suite à l’évolution d’une grandeur interne au système (variable de tension ou de courant aux bornes de cet élément commutant). L’exemple le plus courant concerne les convertisseurs DC-DC dans le cas des fonctionnements à conductions discontinues. Si une diode ou un thyristor s’ouvre sur un zéro de courant, le changement de causalité de cet élément commutant va de fait entraîner un changement de causalité au niveau d’un

Novembre 2007
102
élément résistif ou un élément de stockage d’énergie provoquant dans ce dernier cas un changement d’ordre du système. D’un point de vue structurel, on se trouve donc en présence de systèmes dont l’ordre change, le vecteur d’état n’est plus un invariant et le cas où certaines composantes du vecteur d’état peuvent être discontinues à la commutation doit aussi être envisagé. Il convient donc d’étendre les principes de la commande directe telle que la commande par mode glissant ou la commande stabilisante à ces systèmes. Là encore ce travail rentre directement dans le cadre de la thèse de Mihai Baja. Pour ce qui est de la commande par passivation, la question de la validité du modèle moyen se pose. Cette notion peut-elle toujours être utilisée, doit-elle être adaptée ? Dans le cas particulier où l’ordre du système change mais où il y a toujours continuité du vecteur d’état, ce qui pour des convertisseurs DC-DC correspond au fonctionnement en mode DCM (Discontinuous Conduction Mode), des approchent existent. Mais elles fonctionnent au cas par cas et deviennent rapidement inapplicables dès que le nombre d’interrupteurs non commandés devient important (Mitchell, Greuel, 1998), (Sun, Mitchell, 2001). L’autre cas plus problématique encore est celui où le vecteur d’état peut présenter des discontinuités. Une autre voie de recherche pourrait alors consister à développer une commande directe utilisant les principes de la commande par passivation. Cet axe de recherche fait actuellement l’objet d’une collaboration au sein du réseau européen d’excellence HyCon dans lequel je suis engagé à travers le « workpackage : Energy Management », sous la direction du professeur Manfred MORARI, qui traite entre autres de la commande des systèmes à commutations. Cela a permis des collaborations avec les laboratoires européens suivants :
- Die Eidgenössische Technische Hochschule Zürich (ETH2) (Suisse) - Kungliga Tekniska högskolan (Royal Institute of Technology of
Stockholm) (KTH) (Suède) - Lunds Tekniska Högskola (LTH) (Norvège) - Institute for Mathematics and Computer Science (University of Groningen)
(Pays-Bas) - Centre de Recherche en Automatique de Nancy (CRAN) (France)
Différents benchmarks ont été proposés permettant de comparer des stratégies de commande du point de vue des performances et de la méthodologie, d’abord en simulation puis sur des dispositifs expérimentaux. Ceci se traduit par l’écriture d’articles en commun déjà diffusés (Beccuti, Papafotiou, 2007), (Baja, Patino, 2007 ) ou en préparation. Les principales stratégies envisagées sont la commande MPC (Model Predictive Control) pour l’ETH2, la commande H − ∞ pour KTH ou encore, pour le CRAN, une commande prédictive liée à l’analyse du cycle limite. Plus précisément, l’objectif consiste à déterminer un cycle limite optimal minimisant une fonction de coût. Au sein de l’équipe ASH de SUPELEC nous avons principalement testé la commande par passivation et la commande stabilisante sur les convertisseur suivants : boost, SEPIC et

Habilitation à Diriger des Recherches
103
multiniveaux. Dans le cadre de ce workpackage, la problématique à venir consiste pour notre part à étendre nos stratégies de commande au cas du suivi de trajectoire et au cas des systèmes en fonctionnement DCM, particulièrement à travers deux benchmarks : le convertisseur multiniveaux et le SEPIC. Enfin des problèmes liés à l’observation de l’état et sa reconstruction se posent aussi. Ces travaux sont donc en complète cohérence avec les problématiques et perspectives de recherche évoqués ci-dessus. Travaillant à SUPELEC, je me suis surtout engagé dans des applications liées à l’électricité et plus particulièrement l’étude des convertisseurs. Même si l’électronique de puissance constitue un domaine d’application privilégiée pour l’étude des systèmes à commutations elle n’est pas le seul. Les principes de modélisation, d’analyse et de commande présentés dans ce document peuvent s’appliquer à d’autres secteurs. Depuis octobre 2006, un travail de thèse, en collaboration avec le groupe antenne de l’IETR (Institut d’Electronique et de Télécommunication de Rennes) dont le doctorant est Flavien Somda, à été initié concernant la commande d’une antenne dans le cadre de la mise au point d’un régulateur de vitesse intelligent permettant d’éviter toute collision avec les véhicules qui précèdent et ce quel que soit le profil de la route ou le nombre de véhicules obstacles. Dans un premier temps, la commande de l’antenne, qui utilise un principe de dépointage mécanique, est telle qu’un balayage spatial maximal est assuré à une fréquence fixe adaptée. Le problème est alors double, il faut pouvoir estimer à tout instant le ou les véhicules potentiellement les plus dangereux et déterminer une commande en couple adéquate afin d’éviter les collisions. Pour ce faire, un modèle original de référence est en cours de développement. Il est basé sur la détermination d’une commande de l’inter-distance entre deux véhicules (Martinez Molina, 2005). Le principe consiste à définir une zone de sécurité à partir de laquelle on commence à agir suivant un profil de décélération fixé. Les performances de la commande sont jugées à l’aune des critères suivants : capacité à pouvoir réduire la distance de sécurité, robustesse du système compte tenu des incertitudes de mesure (position et vitesse relatives du véhicule qui précède). Enfin la commande doit autant que possible préserver le confort des passagers. D’un point de vue plus général, si certaines antennes reposent sur des principes de commande continue telle celle utilisée dans l’application précédente, d’autres, comme les antennes multifilaires, ont une commande qui peut s’apparenter à une loi booléenne. Et les perspectives d’applications sont vastes :
• Dans l’industrie automobile, la communication inter-véhiculaire est un domaine d’avenir, qui pose de nombreux problèmes tant au niveau de la commande des antennes équipant les véhicules qu’à un niveau supérieur pour le pilotage et la supervision de tels systèmes.
• Dans le secteur des télécommunications où le pilotage fin des antennes constitue un véritable enjeu. En effet, en téléphonie mobile se pose par exemple le problème

Novembre 2007
104
d’adapter l’antenne du portable en fonction de la borne relais la plus proche afin d’optimiser la réception et donc de pouvoir ainsi minimiser la puissance à fournir.
Toutes ces problématiques, toutes ces perspectives font que l’étude des systèmes hybrides et plus particulièrement l’étude des systèmes à commutations constitue un enjeu majeur et d’avenir contribuant au développement technologique de notre société.

Habilitation à Diriger des Recherches
105
Bibliographie 1. V. Abadie, “Commande des systèmes continus à entrées binaires, application aux
machines électriques,” Thèse de Doctorat de l’Université des Sciences et Techniques de Lille, 1994.
2. R. Alur, C. Courcoubetis, N. Halbwachs, T.A. Henzinger, P.H. Ho, X. Nicollin, A.
Olivero, and J, S. Yovine, “The algorithmic analysis of hybrid systems,” Theoritical Computer Science, n° 138, 1995.
3. B. Allard, H. Morel, P. Lautier, and J.M. Retif, “Bond-graphs for average
modeling of power electronic converters,” ICBGM'97, pp 201-206, Phoenix, january 12-15, 1997.
4. A. Bemporad, and M. Morari, “Control of systems integrating logic, dynamics, and
constraints,” Automatica, pp.407-427, 1999. 5. A. Bemporad, A. Giua, and C. Seatzu, “Synthesis of State-Feedback Optimal
Controllers for Continuous-Time Switched Linear Systems,” Proceedings of the 41st IEEE Conference on Decision and Control, Las Vegas, Décembre 2002
6. W. Borutzky, G. Dauphin-Tanguy, and J.U. Thoma, ”Advances in bond graph
modelling : theory, software, applications,” Mathematics and Computer in Simulation 39, pp 465-475, 1995.
7. M.S. Branicky, “Stability of Switched and Hybrid Systems,” Proceedings of the
33rd Conference on Decision and Control, pp.3498-3503, Lake Buena Vista, FL, Décembre 1994
8. M.S. Branicky, “Stability of Hybrid Systems : State of the Art,” Proceedings of the
IEEE Conference on Decision and Control, pp.120-125, San Diego, Décembre 1997
9. M.S. Branicky, “Multiple Lyapunov Functions and Other Analysis Tools for
Switched and Hybrid Systems,” IEEE Transactions on Automatic Control, Vol.43, N°4, Avril 1998
10. J. Buisson, P.Y. Richard, and H. Cormerais, ”On the Stabilisation of Switching
Electrical Power Converters,” in HSCC2005 (M. Morari and L. Thiele (Eds.)) pp.184-198, 2005.

Novembre 2007
106
11. J. Buisson, H. Cormerais, and P.Y. Richard, “Analysis of the bond graph model of
hybrid physical systems with ideal switches,” Journal of Systems and Control Engineering, vol. 216, pp. 47-72, 2002.
12. J. Buisson, H. Cormerais, and P.Y. Richard, “Using Trees to Build Nonsingular
Bond Graphs from Electric Circuit Graphs,” Journal of the Franklin Institute. Vol 337, N° 5, pp. 543-554, 2000.
13. J. Buisson, H. Cormerais, M. Zainea, H. Guéguen, and E. Godoy, “A formal
approach to compute hybrid automata models for linear physical systems with ideal switches,” presented at 2004 IEEE CACSD, pp. 47-52, Taipei (Taiwan), September 2004.
14. J. Buisson, and H. Cormerais, “Descriptor Systems for the Knowledge Modelling
and Simulation of Hybrid Physical Systems,” Journal Européen des systèmes automatisés, Vol. 32, N° 9-10, pp 1047-1072, 1998.
15. F.E. Cellier, M. Otter, and H. Elmqvist, “Bond graph modeling of variable
structure systems,” ICBGM’95, 1995. 16. H. Cormerais, “De l’application des bond graphs à causalité variable dans la
modélisation multimodèle des systèmes dynamiques hybrides,” Thèse de Doctorat de l’Université de Rennes 1 mention traitement du signal et communication, 1998
17. H. Cormerais, P.Y. Richard, C. Morvan, and J. Buisson, “A Generic Passivity
Based Control for Multicellular Serial Converters,” presented at 16th IFAC World Congress, Proceedings on DVD-ROM 6 pages, Prague, July 2005.
18. H. Cormerais, J. Buisson, S. Leirens, and P.Y. Richard, “Calcul symbolique de
l'ensemble des équations d'état pour les bond graphs en commutation,” presented at CIFA02 :Conférence Francophone Internationale d'Automatique, pp382-387, Nantes (France), 2002.
19. H. Cormerais, P.Y. Richard, C. Morvan, and J. Buisson, “Notion of commutation
cells for the modelling of hybrid systems using ideal switch representation,” presented at IMAACA 2004, pp21-28, Genoa, Italy, 2004.
20. G. Dauphin-Tanguy, C. Sueur, and A. Rahmani, “Analyse Structurelle et
Commande des Modèles Bond Graphs,” Chap. 8, pp.313-350, Hermès, 2000

Habilitation à Diriger des Recherches
107
21. R.A. DeCarlo, and M.S. Branicky, “Perspectives and Results on the Stability ans Stabilizability of Hybrid Systems,” Proceedings of the IEEE, Vol. 88, N°7, Juillet 2000
22. P. De Leenheer, H. Nijmeijer, and B. De Jager, “Stabilizing Hybrid Control Laws,”
15th Triennial World Congress, Spain, 2002 23. C. Edwards, and S.K. Spurgeon. “Sliding Mode Control, theory and applications,”
Taylor & Francis Systems and Control Book Series. 1998 24. G. Escobar, A.J. Van der Schaft, and R. Ortega, “A Hamiltonian viewpoint in the
modelling of switching powers converters,” Automatica, Vol. 35, pp. 445-452, 1999.
25. K. M. Gerritsen, A.J. Van der Schaft, and W. P. Heemels, “On switched
Hamiltonian systems,” Proc. MTNS2002. Indiana, U.S.A., 2002. 26. A. Giua, C. Seatzu, and C. Van Der Mee, “Optimal control of autonomous linear
systems switched with a pre-assigned finite sequence,” Proceedings of the 2001 IEEE International Symposium on Intelligent Control, Mexico City, September 2001a.
27. A. Giua, C. Seatzu, and C. Van Der Mee, “Optimal control of switched
autonomous linear systems,” Proceedings of the 40th IEEE Conference on Decision and Control, Orlando, December 2001b.
28. L.T. Grujic, and G. Dauphin-Tanguy. “Energetic stability and bond-graphs – Part I:
Theoretical Foundations,” IEEE CESA'96, Lille 9-12, July 1996a. 29. L. T. Grujic, and G. Dauphin-Tanguy. “Energetic stability and bond-graphs – Part
II: Bond Graph Approach to Mechanical Systems,” IEEE CESA'96, Lille 9-12, pp303-308, July 1996b.
30. J.P. Hautier, and J.P. Caron, “Convertisseurs statiques. Méthodologie causale de
modélisation et de commande,” Edition Technip, Paris, 1999. 31. W.P.M.H. Heemels, M.K. Camlibe and J.M. Schumacher, “On event-driven
simulation of electrical circuits with ideal diodes,” Journal européen des systemes automatises, Vol. 35, Iss. 4, pp .467-488. Special issue on hybrid dynamical systems, 2001.

Novembre 2007
108
32. I.A. Hiskens, and M.A. Pai, “Trajectory sensitivity analysis of hybrid systems,” IEEE Transactions on Circuits and Systems – part I : Fundamental theory and applications, vol 47 n°2, February 2000.
33. W. Holderbaum, “Commande des Systèmes à Entrées Booléennes,” Thèse de
Doctorat de l’Université des Sciences et Technologies de Lille, 1999. 34. S. Junco. “Lyapunov Second Method and Feedback Stabilisation Directly on Bond
Graphs,” ICBGM’01, Phoenix, January pp7-11, 2001a. 35. S. Junco, “A Bond Graph Approach to Control Systems Synthesis,” ICBGM’01,
Phoenix, 7-11 Janvier, 2001b. 36. D.C. Karnopp, D.L. Margolis, and R.C. Rosenberg, “System Dynamics,” Third
edition, Wiley-Interscience Publication., 1990. 37. D. Liberzon, and A. S. Morse, “Basic Problems in Stability and Design of
Switched Systems,” IEEE Control Systems Magazine, Vol 9, N°5, pp.59-70, Octobre 1999.
38. F. Lorenz, “Discontinuities in bond graphs : what is required ?,” ICBGM’93, SCS
Multiconference, San Diego, January 17-20, 1993. 39. F. Lorenz, and H. Haffaf, “Combination of discontinuities in bond graphs,”
ICBGM’95 Las Vegas, Nevada, January 15-18, SCS , Vol 27 n°1, pp56-64, 1995. 40 J.J. Martinez Molina, “Commande de l’Inter-distance entre deux Véhicules,” Thèse
de l’INPG, mars 2005 41. B. Maschke, A.J. Van der Schaft, and P.C. Breedveld, “An intrinsic Hamiltonian
formulation of the dynamics of LC-circuits,” IEEE. Trans. On Circuits and
Systems, Vol. 42-2, pp. 73-82, 1995. 42. B. Maschke, and A.J. Van der Schaft, “Note on the dynamics of LC circuits with
elements in excess,” Memorandum nº 1426 of the Faculty of Applied Mathematics of the University of Twente, 18pp, ISBN 0169-2690, January 1998.
43. M. Magos M., C. Valentin, and B.M. Maschke., “From dynamic graphs to
geometric interconnection structures of physical systems with variable topology,” IFAC SSSC symposium on System Structure and Control, pp. 336-341, Oaxaca, Mexique, 2004.

Habilitation à Diriger des Recherches
109
44. M. Mitchell, M.F. Greuel, and R. M. Bass, “Modeling of PWM Converters in Discontinuous Conduction Mode – A Reexamination”, Power Electronics Specialists Conference, 1998. PESC 98 Record. 29th Annual IEEE, pp 615-622, Vol. 1, Fukuoka, Japan, 1998.
45. C. Morvan, H. Cormerais, P.Y. Richard, and J. Buisson, “Sliding mode control of
switching systems with boolean inputs,” presented at IFAC NOLCOS 2004, pp747-752, Stuttgart, Allemagne, 2004a.
46. C. Morvan, H. Cormerais, P.Y. Richard, and J. Buisson, “Extending passivity
based control to DAE systems with boolean inputs,” presented at IFAC NOLCOS 2004, pp375-380, Stuttgart, Allemagne, 2004b.
47. C. Morvan, H. Cormerais, J. Buisson, and P.Y. Richard, “Deriving asymptotic
stability of linear switching physical systems from analysis of bond-graph observability,” presented at IEE IMACS CESA’ 03, Proceedings on CD-ROM 6 pages, Lille (France), 2003a.
48. C. Morvan, H. Cormerais, J. Buisson, and P.Y. Richard, “Bond graph formalism
and linear complementarity problem for hybrid systems with ideal diodes,” presented at IFAC ADHS03 : Analysis and Design of Hybrid Systems, pp247-252, Saint-Malo (France), 2003b.
49. C. Morvan, “Analyse et Commande des Systèmes Physiques à Commutations en
Electronique de Puissance,” Thèse de l’Université de Rennes 1, septembre 2004 50. P.J. Mosterman, “Hybrid dynamic systems : a hybrid bond graph modeling
paradigm and its application in diagnosis,” Thesis, 1997. 51. R. Ortega, A. Loria, P.J. Nicklasson, and H. Sira-Ramirez, “Passivity-Based
Control of Euler-Lagrange Systems,” Mechanical, Electrical and Electronical Applications, Springer, 1998.
52. R. Ortega, A. Van Der Schaft, B. Maschke, and G. Escobar, “Interconnection and
Damping Assignment Passivity-Based Control of Port-Controlled Hamiltonian Systems,” Automatica, Vol. 38, N°4, 2002.
53. P. Peleties, and R.A. DeCarlo, “Asymptotic stability of m-switched systems using
Lyapunov like functions,” Proceedings of the American Control Conference, Boston, MA, pp.1679-1684, 1991

Novembre 2007
110
54. W. Perruquetti, and J.P. Barbot, “Sliding Mode Control in Engineering,” Control Engineering Series.
55. P.Y. Richard, H. Cormerais, and J. Buisson, “A generic design methodology for
sliding mode control of switched systems,” Journal of Nonlinear Analysis, vol. 65, pp. 1751-1772, 2006.
56. P.Y. Richard, H. Cormerais, C. Morvan, and J. Buisson, “Boolean Sliding Mode
Control of Multilevel Power Converters,” presented at 16th IFAC World Congress, Proceedings on DVD-ROM 6 Pages, Prague, July 2005.
57. P.Y. Richard, C. Morvan, H. Cormerais, and J. Buisson, “Continuous versus
discrete approaches in sliding mode control of switching systems with boolean Inputs modelled in bond graph,” presented at IMAACA 2004, pp13-20, Genoa, Italy, 2004.
58. P. Riedinger, “Contribution à la commande optimale des systèmes dynamiquies
hybrides,” Thèse, Centre de Recherche en Automatique de Nancy, Institut National Polytechnique de Lorraine, Janvier 2000
59. P. Riedinger, C. Iung, and F. Kratz, “Optimal Control for Switching Systems,”
European Journal of Control, Vol.9, pp.445-454, 2003. 60. M. Romero, “Chattering Reduction Techniques in Sliding Modes Control
Implemented in Discrete Time,” International Conference on Integrated Modeling and Analysis in Applied Control and Automation (IMAACA 2004), Genoa, 2004
61. M. Rubensson, B. Lennartson, and S. Petterson, “Convergence to limit cycles in
hybrid systems – an example,” Symposium on large scale systems : theory and apllications, vol I, pp704-709, IFAC, PATRAS, July 1998.
62. H. Sira-Ramirez, R. A. Perez-Moreno, R. Ortega, and M. Garcia-Esteban,
“Passivity-Based Controllers for the Stabilization of DC-to-DC Power Converters,” Automatica, 33(4), pp.499-513, 1997.
63. J.E. Strömberg, J. Top, and U. Söderman, “Variable causality in bond graphs
caused by discret effects,” In Proc. First Int. Conf. on Bond Graph Modeling (ICBGM '93), number 2 in SCS Simulation Series, volume 25, pp 115-119, San Diego, 1993.
64. J.E. Strömberg, “A mode switching modelling philosophy,” Thesis, Linköping
n°353, 1994.

Habilitation à Diriger des Recherches
111
65. C. Sueur, G. Dauphin-Tanguy, “Structural controllability/observability of linear systems represented by bond graphs”, Journal of the Franklin Institute, 326(6), pp 869-883, 1989
66. J. Sun, D.M. Mitchell, M.F. Greuel, P.T. Krein and R. M. Bass, “Averaged
Modeling of PWM Converters Operating in Discontinuous Conduction Mode”, IEEE Transactions on Power Electronics, Vol. 16, July 2001.
67. J. Van Dijk, and P.C. Breedveld, “Simulation of Systems Containing Zero-order
Causal Paths I Classification of Zero-order Causal Paths,” Journal of the Franklin Institute, 328(5/6), 959-979, 1991.
68. C. Valentin, M. Magos, and B.M. Maschke, “Hybrid port Hamiltonian Systems:
from parameterized incidence matrices to hybrid automata,” Nonlinear Analysis, vol. 65, issue 6, p.1106-1122, 2006-a.
69. A.J. Van der Schaft, and B.M. Maschke, “The Hamiltonian formulation of energy
conserving physical systems with ports,” Archiv für Elektronik und
Übertragungstechnik, Vol. 49-5/ 6, pp. 362– 371, 1995. 70. A.J. Van der Schaft, “L2-gain and passivity techniques in nonlinear control”,
Berlin, Springer, 1999.
71. M.A. Wicks, P. Peleties, and R.A. DeCarlo, “Construction of piecewise Lyapunov functions for stabilizing switched systems,” Proceedings of the 33rd Conference on Decision and Control, pp.3492-3497, Lake Buena Vista, FL, Décembre 1994
72. X. Xu, and P.J. Antsaklis, “Optimal Control of Switched Systems via Nonlinear
Optimization Based on Direct Differentiations of Value Functions,” International Journal of Control, 2002a
73. X. Xu, and P.J. Antsaklis, “Optimal Control of Switched Autonomous Systems,”
Proceedings of the 41st IEEE Conference on Decision and Control, pp.4401-4406, Las Vegas, Décembre 2002b.
74. H. Ye, A.N. Michel, and L. Hou, “Stability Theory for Hybrid Dynamical
Systems,” IEEE Transactions on Automatic Control, Vol. 43, N°4, Avril 1998 75. M. Zainea, E. Godoy, H. Cormerais, J. Buisson, and H. Guéguen, “A double
resonance generator simulation using a hybrid approach,” presented at 11th European Conference on Power Electronics and Applications, Dresden (Germany), Proceedings on CD ROM 6 pages, 2005.

Novembre 2007
112
76. M. Zainea, J. Buisson, H. Cormerais, H. Guéguen, and E. Godoy, “Automatic Simulink Model Building for Physical Switching Systems,” presented at 17th IMACS World Congress Scientific Computation, Applied Mathematics and Simulation, Paris (France), Proceedings on CD ROM 6 pages, 2005.
77. J. Zaytoon, “Systèmes dynamiques hybrides,” Hermès Science Publications, Paris,
2001.

Habilitation à Diriger des Recherches
113

Novembre 2007
114