-
Sciences de lingnieur
performancesBO-BF Lyce Jacques AmyotAuxerre 29/11/2004 Page 1
sur 5
PERFORMANCES DES SYSTEMES BOUCLES.
I ETUDE DUN PREMIER ORDRE :
1) En boucle ouverte :
La forme canonique de HO(p) est :
o :x Ko est le gain statique de la chane directe (ou gain
statique en boucle ouverte),x W o est la constante de temps de la
chane directe (constante de temps de la boucle
ouverte).
Evaluation de la rapidit du systme :
Cette valuation se fait par lintermdiaire du calcul de t 5%. Ici
: t 5% = 3. W o
Evaluation de lerreur statique du systme pour une entre chelon
unitaire :
Cette valuation se fait par lintermdiaire du calcul de Hs(t) :
fo H
ttstets ))()(lim()(
Daprs le thorme de la valeur finale on peut calculer Hs(t) grce
: 0ppSpEpts
o H ))()(.(lim)(
On trouve : Hs(t) = 1-KoKo tant positif alors : f d dHs t( )
1
2) En boucle ferme :
Exprimons HF(p)en fonction des paramtres de Ho(p) :
)()()(pH1
pHpHo
OF
soit
p1K1
p1K
pH
0
O
0
O
F
.
.)(W
W , soit en rduisant :pK1
KpH00
OF
.
)(W
En mettant HF(p) sous forme canonique il vient : p
K11
K1K
pH
O
0
O
O
F.
)(W
On pose :
x0
0F K1
KK
o KF est appel le gain statique du systme boucl,
x0
0F K1
W W o W F est appel la constante de temps du systme boucl
Finalement on peut crire : p1
KpHF
FF
.
)(W
p1KpH
o
oo
.
)( W
HO(p)E(p) S(p)
HO(p)E(p) S(p)
HF(p)E(p) S(p)
=+-
-
Sciences de lingnieur
performancesBO-BF Lyce Jacques AmyotAuxerre 29/11/2004 Page 2
sur 5
Evaluation de la rapidit du systme :
Cette valuation se fait par lintermdiaire du calcul de t 5%. Ici
: t 5% = 3. W F soit
0
05 K1
3tW .%
Evaluation de lerreur statique du systme pour une entre chelon
unitaire :
Cette valuation se fait par lintermdiaire du calcul de Hs(t)
:
fo H
ttstets ))()(lim()(
Daprs le thorme de la valeur finale on peut calculer Hs(t) grce
:
0ppSpEpts
o H ))()(.(lim)(
On trouve : o
s K11t
H )(
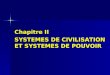
Ko tant positif alors : 0 1d dHs t( )3) Reprsentation graphique
de s(t) dans les cas B.O. et B.F. :
Ces tracs sont raliss pour une entre chelon unitaire, avec K0 =
2 et W 0=1s. Dans le cas de la boucle ferme le retour est considr
comme unitaire.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6 6.5 7 7.5 8 8.5 9 9.5
10-0.25 0.25 0.75 1.25 1.75 2.25 2.75 3.25 3.75 4.25 4.75 5.25 5.75
6.25 6.75 7.25 7.75 8.25 8.75 9.25 9.75 10.25
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
2
2.1
-0.15
-0.05
0.05
0.15
0.25
0.35
0.45
0.55
0.65
0.75
0.85
0.95
1.05
1.15
1.25
1.35
1.45
1.55
1.65
1.75
1.85
1.95
2.05
2.15
FTBF 1ER ORDRE
FTBO 1ER ORDRE
Echelon unitaire
-
Sciences de lingnieur
performancesBO-BF Lyce Jacques AmyotAuxerre 29/11/2004 Page 3
sur 5
4) Conclusions :Le bouclage na pas modifi lordre du systme,Le
bouclage a modifi le gain du systme : KF
-
Sciences de lingnieur
performancesBO-BF Lyce Jacques AmyotAuxerre 29/11/2004 Page 4
sur 5
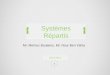
Evaluation de la rapidit du systme :
Grce labaque du temps de rponse rduit utilisable pour les
systmes du second ordre ci-dessous, on value dans les deux cas
tr.Zn:
On peut lire sur labaque :
Ce qui conduit aux rponses suivantes :
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3 3.2 3.4
3.6 3.8 4 4.2 4.4 4.6 4.8 5 5.20.1 0.3 0.5 0.7 0.9 1.1 1.3 1.5 1.7
1.9 2.1 2.3 2.5 2.7 2.9 3.1 3.3 3.5 3.7 3.9 4.1 4.3 4.5 4.7 4.9
5.1
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6
2.8
3
3.2
-0.1
0.1
0.3
0.5
0.7
0.9
1.1
1.3
1.5
1.7
1.9
2.1
2.3
2.5
2.7
2.9
3.1
3.3
En boucle ouverte :
tr.Zno # 3 donc tr 5% # 1.5 s
En boucle ferme :
tr.ZnF # 8 donc tr 5% # 2 s
tr.Zn
Coefficient damortissement a
FTBF 2me ORDRE
FTBO 2me ORDRE
Echelon unitaire
-
Sciences de lingnieur
performancesBO-BF Lyce Jacques AmyotAuxerre 29/11/2004 Page 5
sur 5
4) Conclusion :Le systme boucl est donc aussi un systme du
second ordre, aF est infrieur ao. Or, pour un systme du second
ordre, cest pour un facteur damortissement de 0,7 que le temps de
rponse est minimum. Aussi, si ao est suprieur 0.7, le bouclage peut
amliorer le temps de rponse, par contre si ao est dj infrieur 0.7,
le bouclage conduit augmenter le temps de rponse 5%.
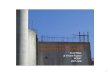
III INFLUENCE DU GAIN SUR LE COMPORTEMENT TEMPOREL :
Les tudes temporelles menes ci -dessus montre limportance du
gain de la chane directe dans ltablissement des performances dun
systme boucl. Cest la raison de la prsence, dans la chane directe
aprs le comparateur, dun gain variable KV que lon pourra ajuster
aux performances attendues du systme. Ce qui donne le schma bloc de
la figure ci-dessus.
Il est important de ne pas confondre le gain statique Ko de
Ho(p), qui est structurel (pour le modifier il faut modifier la
structure du processus commander) avec le gain variable KV, qui est
introduit dans la chane directe.
Nota : Les rsultats prcdents sont transfrables cette tude en
remplaant le gain de la chane directe par le produit du gain
structurel Ko et du gain variable (ajustable) KV.
IV CONCLUSION :
Par rapport aux trois critres de performance : la prcision, la
rapidit et les dpassements, on remarque que linfluence dun gain KV
est positive pour la prcision et la rapidit, ce qui semble conduire
rechercher un gain maximum.Outre que pour un systme du second ordre
une valeur trop importante du gain peut conduire des dpassements
nfastes, on constate par ailleurs que ce choix mne aussi vers
linstabilit. Aussi lors du rglage, il faut toujours rechercher le
gain minimum qui permet dassurer les performances temporelles
souhaites.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6
1.7 1.8 1.9 2 2.1 2.2 2.30.05 0.15 0.25 0.35 0.45 0.55 0.65 0.75
0.85 0.95 1.05 1.15 1.25 1.35 1.45 1.55 1.65 1.75 1.85 1.95 2.05
2.15 2.25
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0.55
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
1.05
1.1
-0.075
-0.025
0.025
0.075
0.125
0.175
0.225
0.275
0.325
0.375
0.425
0.475
0.525
0.575
0.625
0.675
0.725
0.775
0.825
0.875
0.925
0.975
1.025
1.075
HO(p)S(p)E(p)
KV
Kv KF t5% (s)1 0.75 45 0.9375 0.8810 0.9677 0.3615 0.9782 0.2620
0.9836 0.31
KV =1
KV =5
KV =10
KV =20
KV =15
Etude ralise avec a0=5,Z n0=2 rad/s et K0=3