Embed Size (px)
Citation preview
PLATEAU TOURNANT A COMMANDE PNEUMATIQUE
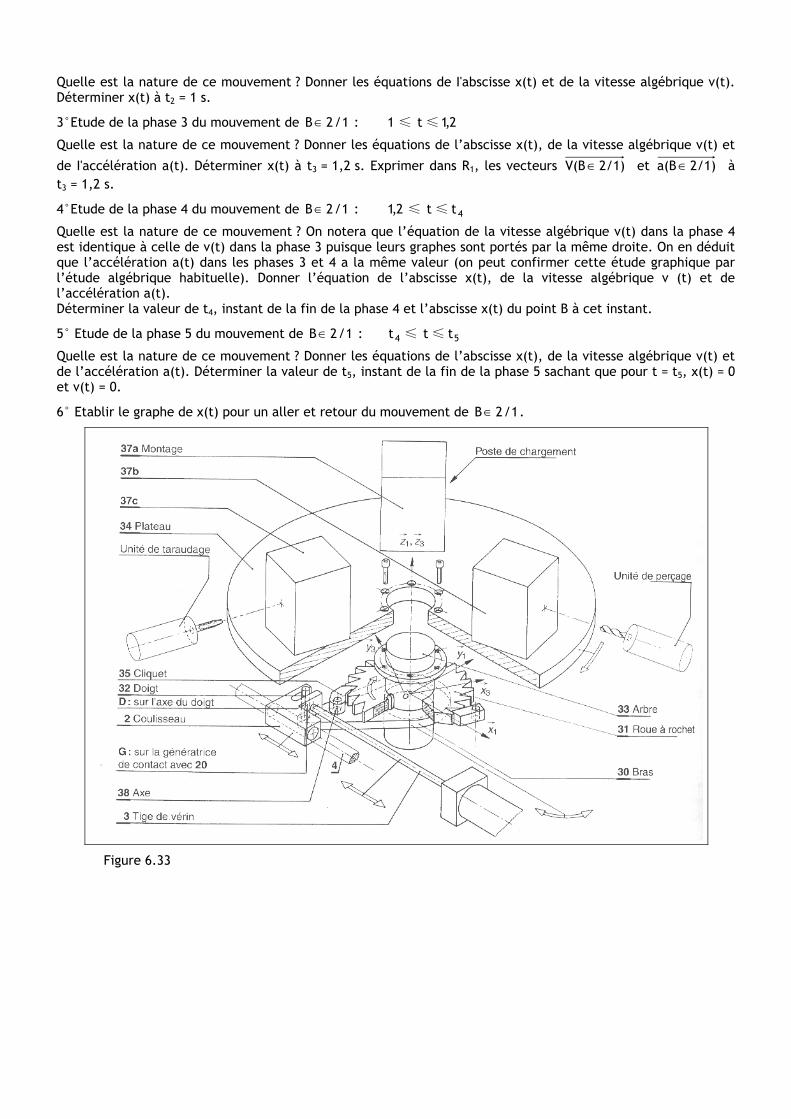
• Mise en situation. La figure 6.33 représente un plateau tournant à commande pneumatique, équipé de trois montages identiques, qui permet un transfert rotatif de la pièce à usiner vers les postes de travail suivants :
- chargement et déchargement de la pièce; - perçage ∅ 4,8; - taraudage M6.
• Fonctionnement (fig. 6.33 et fig. 6.34). Le coulisseau 2 guidé en translation sur le bâti 1, solidaire de la
tige 3 de vérin, déplace par sa rainure un doigt 32 encastré dans le bras 30. Le bras 30, libre en rotation autour de I'arbre 33 du plateau, entraîne, par I'intermédiaire du cliquet 35, une roue à rochet 31, solidaire de l’arbre 33. La rotation de 120° pour changer de poste de travail est obtenue par deux rotations successives de 60° du plateau tournant. La rotation de 50° à 60° est amortie par le vérin, afin de diminuer le choc sur la but6e 12 en fin de course. Les capteurs électriques 15 et 16 permettent le réglage de la course du coulisseau 2.
• Repérage des liaisons. Le plateau tournant est en liaison encastrement avec l’arbre 33.
La roue à rochet 31 est en liaison encastrement avec l’arbre 33.
L’arbre 33 est en liaison pivot d'axe ( )z,O 1r
avec le bâti 1. r
Le bras 30 est en liaison pivot d’axe ( )z,O 1 avec: I'arbre 33.
Le cliquet 35 est en liaison pivot d'axe ( )z,C 1r
avec le bras 30.
Le cliquet anti-retour 43 est en liaison pivot d’axe ( )z,D 1r
avec 1.
La tige de guidage 4 est en liaison encastrement avec 1. Le coulisseau 2 est en liaison glissière avec 4
• Etude du mouvement du coulisseau 2. Soit R )z,y,x,A(= 1111
rrr un repère lié au support 1. On se propose
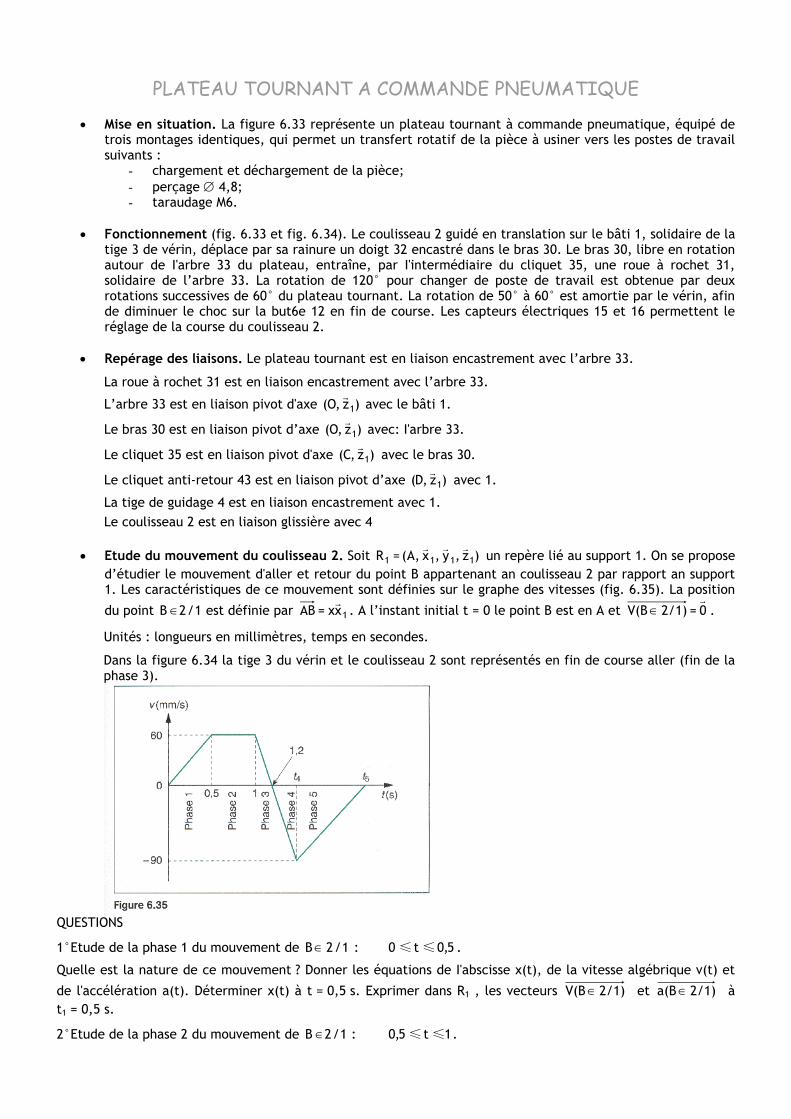
d’étudier le mouvement d'aller et retour du point B appartenant an coulisseau 2 par rapport an support 1. Les caractéristiques de ce mouvement sont définies sur le graphe des vitesses (fig. 6.35). La position
du point est définie par 1/2∈B 1xx=ABr
. A l’instant initial t = 0 le point B est en A et 0 = 2/1) V(Br
∈ .
Unités : longueurs en millimètres, temps en secondes.
Dans la figure 6.34 la tige 3 du vérin et le coulisseau 2 sont représentés en fin de course aller (fin de la phase 3).
QUESTIONS
1°Etude de la phase 1 du mouvement de B : . 1/2∈ 5,0t0 ≤≤
Quelle est la nature de ce mouvement ? Donner les équations de I'abscisse x(t), de la vitesse algébrique v(t) et
de l'accélération a(t). Déterminer x(t) à t = 0,5 s. Exprimer dans R1 , les vecteurs 2/1) V(B∈ et 2/1) a(B∈ à t1 = 0,5 s.
2°Etude de la phase 2 du mouvement de B : . 1/2∈ 1t5,0 ≤≤
Quelle est la nature de ce mouvement ? Donner les équations de I'abscisse x(t) et de la vitesse algébrique v(t). Déterminer x(t) à t2 = 1 s.
3°Etude de la phase 3 du mouvement de B : 1/2∈ 2,1t1 ≤≤
Quelle est la nature de ce mouvement ? Donner les équations de l’abscisse x(t), de la vitesse algébrique v(t) et
de I'accélération a(t). Déterminer x(t) à t3 = 1,2 s. Exprimer dans R1, les vecteurs 2/1) V(B∈ et 2/1) a(B∈ à t3 = 1,2 s.
4°Etude de la phase 4 du mouvement de B : 1/2∈ 4tt2,1 ≤≤
Quelle est la nature de ce mouvement ? On notera que l’équation de la vitesse algébrique v(t) dans la phase 4 est identique à celle de v(t) dans la phase 3 puisque leurs graphes sont portés par la même droite. On en déduit que l’accélération a(t) dans les phases 3 et 4 a la même valeur (on peut confirmer cette étude graphique par l’étude algébrique habituelle). Donner l’équation de l’abscisse x(t), de la vitesse algébrique v (t) et de l’accélération a(t). Déterminer la valeur de t4, instant de la fin de la phase 4 et l’abscisse x(t) du point B à cet instant.
5° Etude de la phase 5 du mouvement de B : 1/2∈ 54 ttt ≤≤
Quelle est la nature de ce mouvement ? Donner les équations de l’abscisse x(t), de la vitesse algébrique v(t) et de l’accélération a(t). Déterminer la valeur de t5, instant de la fin de la phase 5 sachant que pour t = t5, x(t) = 0 et v(t) = 0.
6° Etablir le graphe de x(t) pour un aller et retour du mouvement de B . 1/2∈
Figure 6.33
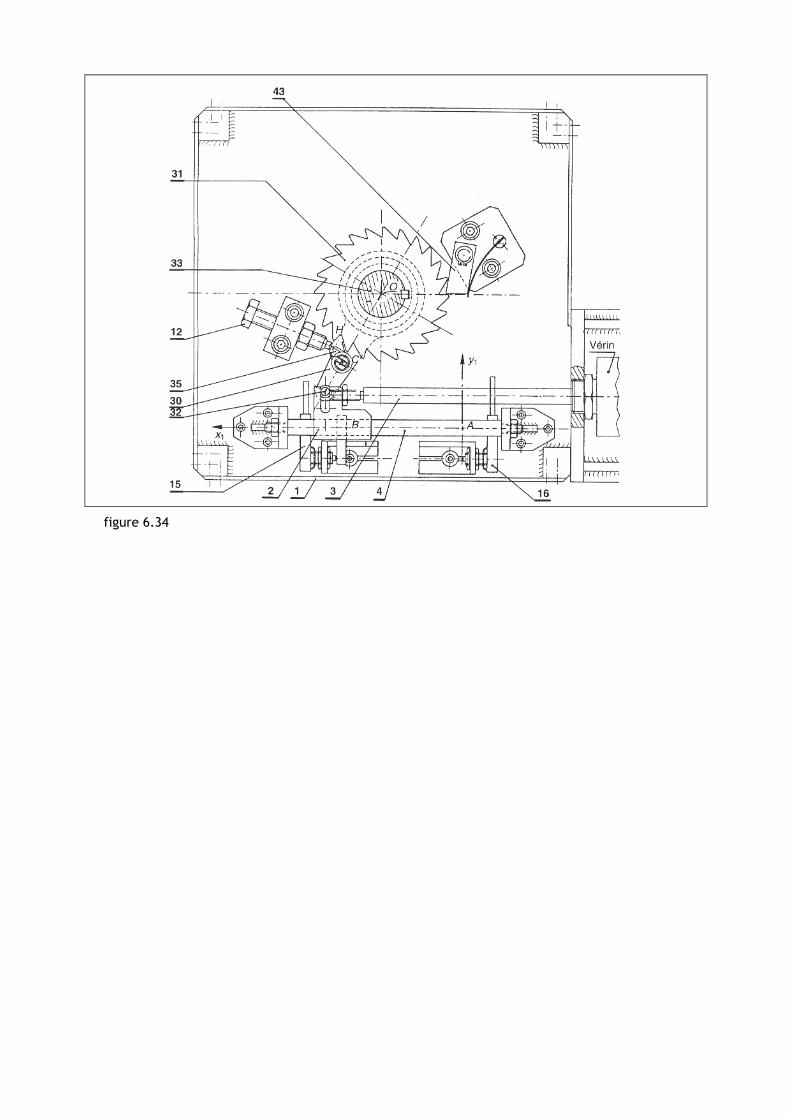
figure 6.34





























