Embed Size (px)
Citation preview

Réalisation d'un codeur incrémental à partir d'un moteur pas à pas.
Extrait du PoBot
http://www.pobot.org
Réalisation d'un codeur
incrémental à partir d'un
moteur pas à pas.- Robopedia - Constituants - Les capteurs - Capteurs de position -
Date de mise en ligne : lundi 17 octobre 2005
PoBot
Copyright © PoBot Page 1/3

Réalisation d'un codeur incrémental à partir d'un moteur pas à pas.
Sommaire• Principe• Description du circuit• Schéma du circuit• Pour aller plus loin
Les codeurs incrémentaux sont largement utilisés en robotique pour réaliser des asservissements en vitesse et/ouen position. Mais ils sont relativement couteux, surtout quand une bonne résolution est nécessaire. Une solution àpeu de frais consiste à utiliser un moteur pas à pas de récupération.
Principe
Ces moteurs ont typiquement deux bobinages qui produisent des pulses en quadrature de phase quand l'axe dumoteur est mis en rotation. Les signaux peuvent ainsi être mis en forme pour produire deux trains d'impulsionsdigitaux que l'on lira avec un microcontrôleur comme on le ferait avec tout autre codeur incrémental.
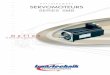
Voici à quoi ressemblent ces signaux (réalisés avec un analyseur logique) :
Signaux en quadrature
Si vous lisez de gauche à droite, l'alternance des niveaux haut et bas sur la phase B par rapport à ceux sur la phaseA est différente que si vous lisez de droite à gauche, donc :
vous connaissez le sens de rotation chacun des fronts d'une des deux phases correspond à un demi-pas de moteur
On obtient ainsi un encodeur d'une précision égale à 2 fois le nombre de pas du moteur. Attention à bien gérer leretour en arrière quand vous êtes au milieu d'un pas (c'est pour ça qu'on n'utilise pas tous les fronts : il vaut mieuxutiliser le front sur phase A et le front sur phase B pour valider le pas en cours, sinon on perd de la précision quandle robot vibre autour de sa position (on incrémente à tord).
Note : choisir un moteur bi-polaire présentant un faible couple de maintien à vide : ainsi il tournera avec moinsd'effort.
<!-- google_ad_client = "ca-pub-6809994141685910"; /* Corps central */ google_ad_slot = "0178404633";google_ad_width = 728; google_ad_height = 90; //--» <script type="text/javascript"src="http://pagead2.googlesyndication.com/pagead/show_ads.js">
Description du circuit
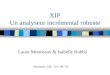
Un double comparateur est utilisé pour produire des signaux carrés à partir des sorties des bobinages. Un fil de
Copyright © PoBot Page 2/3

Réalisation d'un codeur incrémental à partir d'un moteur pas à pas.
chaque bobinage est connecté à une tension de référence valant la moitié de la tension d'alimentation du circuit.
L'autre extrémité des bobinages est connecté via un circuit de limitation courant/tension à l'entrée non-inverseused'un comparateur. Une résistance (voir schéma, R7 & R8) limite le courant de retour dans les diodes de protection(D5-D8) du comparateur contre les pics de tension des bobines.
Les entrées inverseuses sont connectées à la tension de référence alim/2. Un offset est appliqué via R10 et R11 auxentrées inverseuses pour produire une hystérésis.
Note : si l'alimentation est de 5 volts, les sorties sont compatibles TTL.
Ce circuit est suffisamment sensible pour détecter un seul pas, même à basse vitesse. Si les vitesses à mesurer sontvraiment très faibles, il faut prévoir un engrenage pour assurer une vitesse de rotation de l'axe moteur suffisante.
Schéma du circuit
Pour conclure, pensez à relier à la masse la carcasse des moteurs pour éviter de parasiter les comparateurs.
Pour aller plus loin
Cette utilisation est répandue et on en trouve trace dans de nombreux articles (en anglais généralement) sur Internetou dans les magazines. Par exemple : montage de 4QD-TEC [http://www.4qdtec.com/stpen.html].
Copyright © PoBot Page 3/3