Embed Size (px)
Citation preview
STATIQUE
I) Généralité sur la Mécanique classique :
1) Définition :
- La Mécanique classique est une science ayant pour objet l’étude du mouvement des corps compte
tenu des causes qui entretiennent ces mouvement, en admettant que la masse est conservative et que leurs
vitesse sont faibles devant celle de la lumière (3. 105 𝑘𝑚. 𝑠−1).
Si ce n’est pas le cas, il faudra utiliser la Mécanique relativiste, pour laquelle la masse augmente avec la
vitesse.
- Sciences associés : Résistance des matériaux, Mécanique vibratoire, Mécanique des fluides …
2) Fondement de la Mécanique classique :
La mécanique repose sur l’acceptation de principes. Non démontrés mais qui se vérifient par l’expérience
(énoncés par Copernic, Galilée, Newton en observant le mouvement des étoiles).
Ces principes sont vérifiés dans un référentiel particulier et suivant une chronologie :
- Référentiel absolu :
C’est le référentiel de Copernic dont le centre est le centre de gravité du système solaire et dont les axes
passent par trois étoiles fixes (l’une par rapport à l’autre)
Attention : Approximation de la Mécanique classique car il faudrait prendre le centre de l’Univers.
- Référentiel Galiléen :
Tout repère en translation rectiligne uniforme par rapport au repère de Copernic est dit « Copernic ».
Ainsi en considérant la trajectoire de la Terre (elliptique et grand rayon de courbure) et sa faible vitesse
de rotation (1 tour = 365,25 jours) on considèrera que le repère géocentrique est Galiléen (pour une durée
de quelques jours) ⇒ Repère d’étude.
3) Modélisation des objets :
Définitions :
- Point matériel : entité abstraite qui attribue à un point géométrique une dimension nulle et une masse
finie.
- Solide réel : ensemble de point matériel n’ayant pas de dimensions fixes : il est déformable sous
l’effet d’une force ⇒ étudié en RDM.
- Système matériel : quantité de matière homogène ou non, dont la masse reste constante.
Ex : Une masse fluide.
- Solide parfait : c’est un solide indéformable.
4) Action Mécanique :
La cause du mouvement est l’action mécanique. Cette action mécanique (AM) peut exister à distance ou au
contact. Nous modéliserons les AM à l’aide d’outil vectoriel.
a) Classification :
- A distance : Champ magn. ou champ de pesanteur
Exemple :
Poids :
Dû à l’attraction de la Terre sur un objet
Direction : verticale passant par le centre de gravité (CDG)
Sens : vers le bas
PA : CDG du solide
Intensité : 𝑃 = 𝑚.𝑔
- Au contact :
Ces forces dépendent du contact entre 2 solides. Elles sont difficiles à analyser car les formes des solides
sont diverses et leur surface de contact est non-uniforme en majorité.
Il faut donc effectuer une étude au cas par cas.
b) Modélisation :
1- Hypothèses :
Solides indéformables.
Poids propres de certains solides : négligés devant d’autre (étude au cas par cas).
Solides géométriquement parfaits ⇒ contact uniforme.
Contact sans adhérence (au cas par cas)
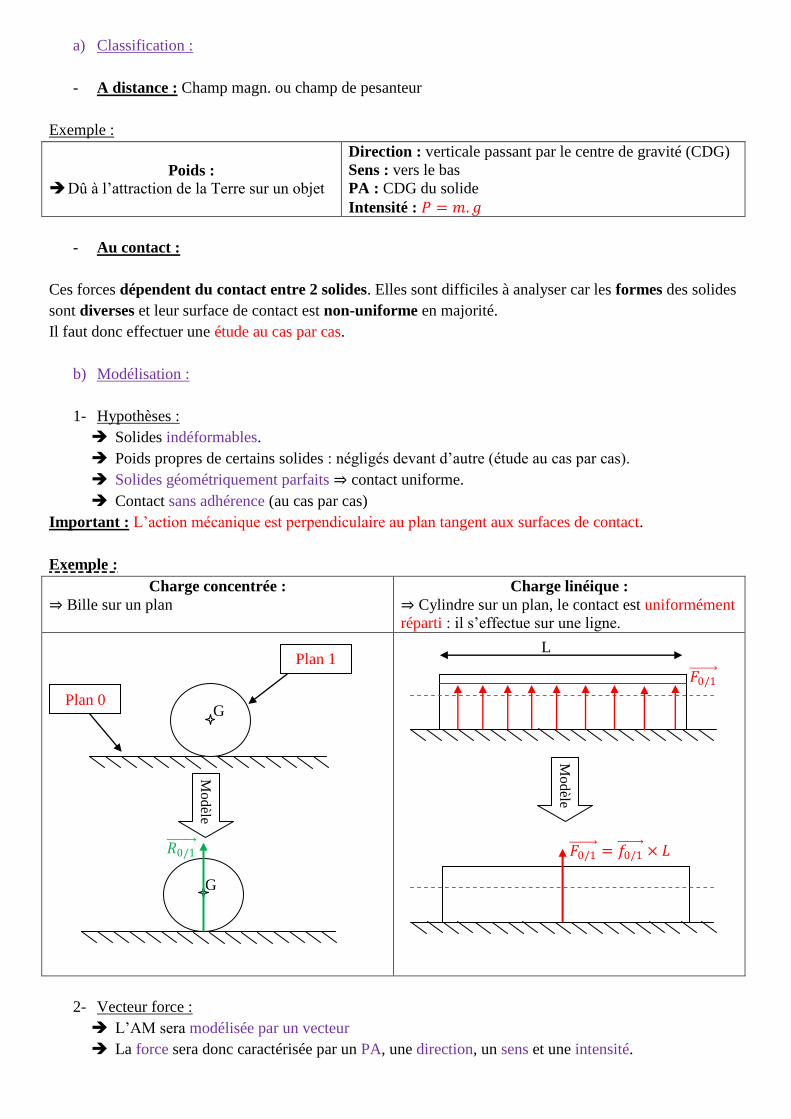
Important : L’action mécanique est perpendiculaire au plan tangent aux surfaces de contact.
Exemple :
Charge concentrée :
⇒ Bille sur un plan
Charge linéique :
⇒ Cylindre sur un plan, le contact est uniformément
réparti : il s’effectue sur une ligne.
2- Vecteur force :
L’AM sera modélisée par un vecteur
La force sera donc caractérisée par un PA, une direction, un sens et une intensité.
G
Plan 1
Plan 0
Mo
dèle
G
𝑅0/1
Mo
dèle
L
𝐹0/1
𝐹0/1 = 𝑓0/1
× 𝐿
Exemple :
Important : Quelque soit le point d’application sur la ligne d’action (AB), les effets sur le solide sont
identiques, (AB) est aussi appelé le support du vecteur.
3- Modélisation :
L’AM est donc modélisée par un vecteur glissant (ou glisseur). Il est constitué de l’ensemble des
bipoints équipollents appartenant à la même ligne d’action.
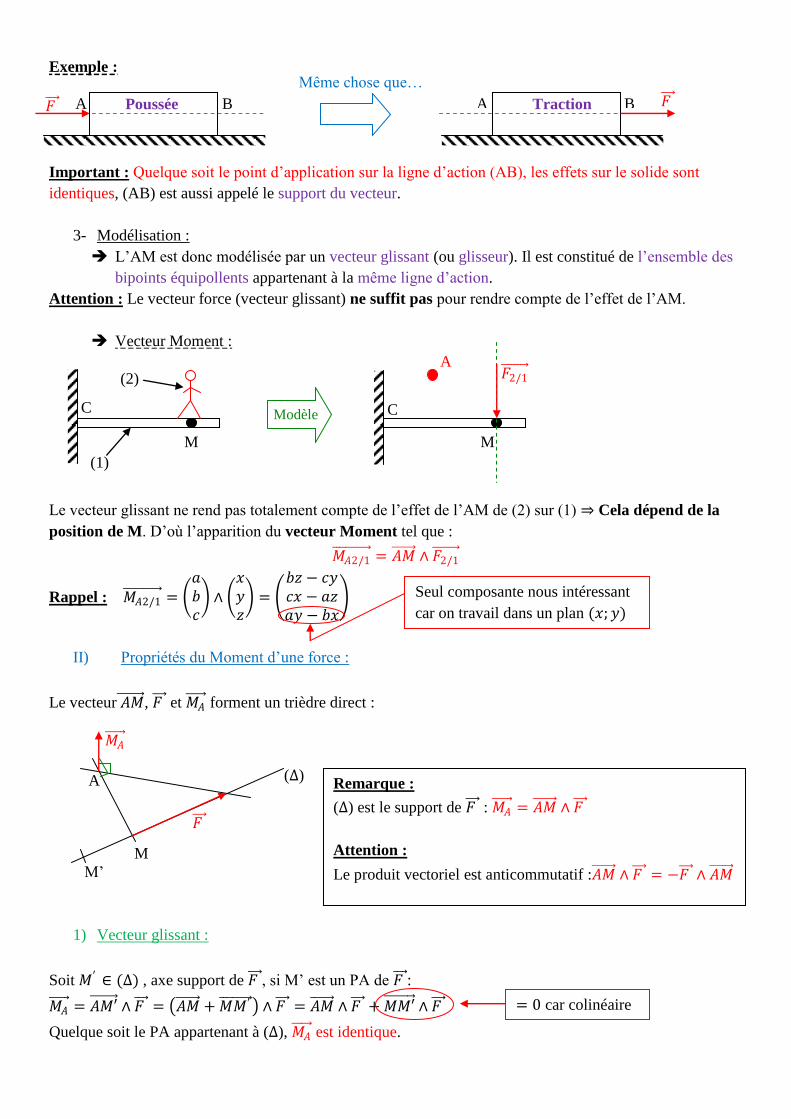
Attention : Le vecteur force (vecteur glissant) ne suffit pas pour rendre compte de l’effet de l’AM.
Vecteur Moment :
Le vecteur glissant ne rend pas totalement compte de l’effet de l’AM de (2) sur (1) ⇒ Cela dépend de la
position de M. D’où l’apparition du vecteur Moment tel que :
𝑀𝐴2/1 = 𝐴𝑀 ∧ 𝐹2/1
Rappel : 𝑀𝐴2/1 =
𝑎𝑏𝑐 ∧
𝑥𝑦𝑧 =
𝑏𝑧 − 𝑐𝑦𝑐𝑥 − 𝑎𝑧𝑎𝑦 − 𝑏𝑥
II) Propriétés du Moment d’une force :
Le vecteur 𝐴𝑀 , 𝐹 et 𝑀𝐴 forment un trièdre direct :
1) Vecteur glissant :
Soit 𝑀′ ∈ (∆) , axe support de 𝐹 , si M’ est un PA de 𝐹 :
𝑀𝐴 = 𝐴𝑀′ ∧ 𝐹 = 𝐴𝑀 + 𝑀𝑀′ ∧ 𝐹 = 𝐴𝑀 ∧ 𝐹 + 𝑀𝑀′ ∧ 𝐹
Quelque soit le PA appartenant à (∆), 𝑀𝐴 est identique.
B A 𝐹
Même chose que…
𝐹 A B Poussée Traction
C
M
(1)
(2)
Modèle
M
C
A 𝐹2/1
Seul composante nous intéressant
car on travail dans un plan (𝑥;𝑦)
M’
(∆)
M
𝐹
𝑀𝐴
Remarque :
(∆) est le support de 𝐹 : 𝑀𝐴 = 𝐴𝑀 ∧ 𝐹
Attention :
Le produit vectoriel est anticommutatif :𝐴𝑀 ∧ 𝐹 = −𝐹 ∧ 𝐴𝑀
A
= 0 car colinéaire
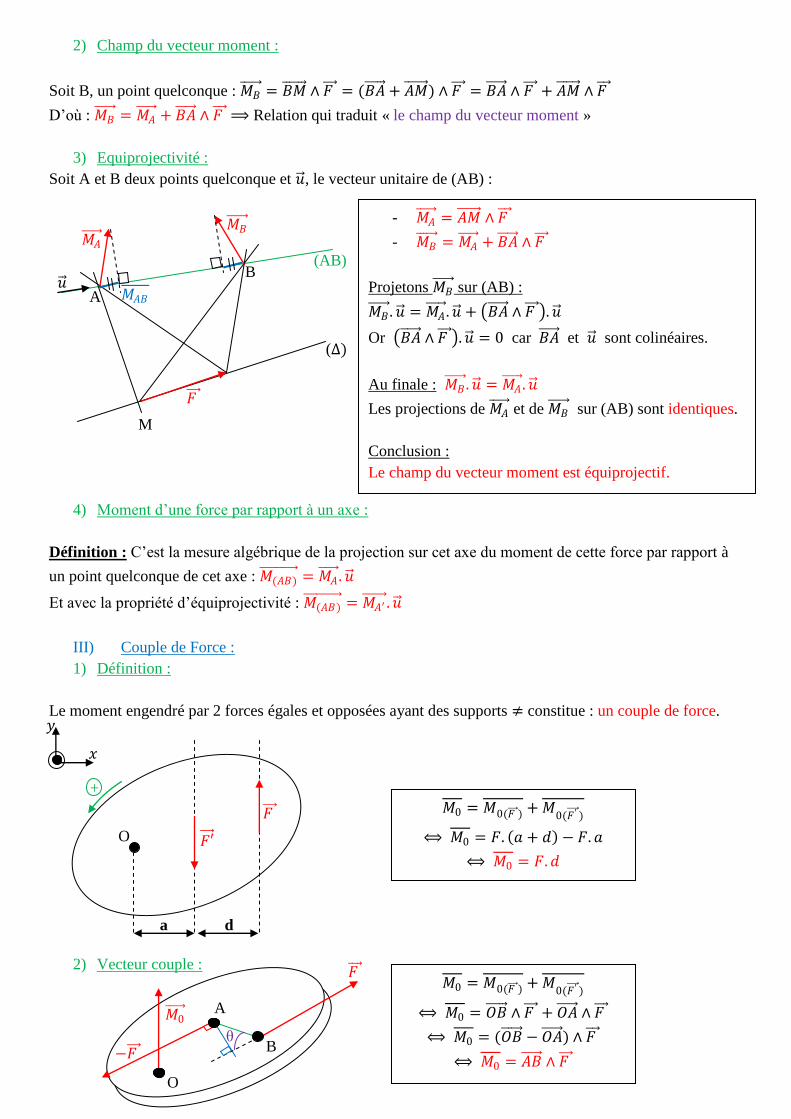
2) Champ du vecteur moment :
Soit B, un point quelconque : 𝑀𝐵 = 𝐵𝑀 ∧ 𝐹 = (𝐵𝐴 + 𝐴𝑀 ) ∧ 𝐹 = 𝐵𝐴 ∧ 𝐹 + 𝐴𝑀 ∧ 𝐹
D’où : 𝑀𝐵 = 𝑀𝐴
+ 𝐵𝐴 ∧ 𝐹 ⟹ Relation qui traduit « le champ du vecteur moment »
3) Equiprojectivité :
Soit A et B deux points quelconque et 𝑢 , le vecteur unitaire de (AB) :
4) Moment d’une force par rapport à un axe :
Définition : C’est la mesure algébrique de la projection sur cet axe du moment de cette force par rapport à
un point quelconque de cet axe : 𝑀(𝐴𝐵) = 𝑀𝐴
. 𝑢
Et avec la propriété d’équiprojectivité : 𝑀(𝐴𝐵) = 𝑀𝐴′
.𝑢
III) Couple de Force :
1) Définition :
Le moment engendré par 2 forces égales et opposées ayant des supports ≠ constitue : un couple de force.
2) Vecteur couple :
- 𝑀𝐴 = 𝐴𝑀 ∧ 𝐹
- 𝑀𝐵 = 𝑀𝐴
+ 𝐵𝐴 ∧ 𝐹
Projetons 𝑀𝐵 sur (AB) :
𝑀𝐵 . 𝑢 = 𝑀𝐴
.𝑢 + 𝐵𝐴 ∧ 𝐹 .𝑢
Or 𝐵𝐴 ∧ 𝐹 .𝑢 = 0 car 𝐵𝐴 et 𝑢 sont colinéaires.
Au finale : 𝑀𝐵 .𝑢 = 𝑀𝐴
. 𝑢
Les projections de 𝑀𝐴 et de 𝑀𝐵
sur (AB) sont identiques.
Conclusion :
Le champ du vecteur moment est équiprojectif.
𝑀0 = 𝑀0(𝐹 ) + 𝑀0(𝐹′ )
⟺ 𝑀0 = 𝐹. 𝑎 + 𝑑 − 𝐹.𝑎
⟺ 𝑀0 = 𝐹.𝑑
𝑀0 = 𝑀0(𝐹 ) + 𝑀0(𝐹′ )
⟺ 𝑀0 = 𝑂𝐵 ∧ 𝐹 + 𝑂𝐴 ∧ 𝐹
⟺ 𝑀0 = (𝑂𝐵 − 𝑂𝐴 ) ∧ 𝐹
⟺ 𝑀0 = 𝐴𝐵 ∧ 𝐹
O
a d
+
𝑥
𝑦
𝐹′
𝐹
M
𝐹
A
B 𝑢
(∆)
(AB)
𝑀𝐴
𝑀𝐵
𝑀𝐴𝐵
A
B θ
O
𝐹
−𝐹
𝑀0

Par suite, le vecteur couple est un invariant quelque soit la position de O, quelque soit ce que l’on cherche.
Et 𝑀0 = 𝑀0 = 𝐴𝐵.𝐹. sin 𝜃 = 𝐹.𝑑
IV) Réduction d’un système de Force ⇒ Notion de résultante :
Remarques :
- 𝑀𝐼𝑒𝑥𝑡 /𝑠 = 0 et 𝑅𝑒𝑥𝑡 /𝑠
≠ 0 Résultante unique.
- 𝑀𝐼𝑒𝑥𝑡 /𝑠 ≠ 0 et 𝑅𝑒𝑥𝑡 /𝑠
= 0 Couple unique.
V) Principe de la mécanique classique :
Rappel : un principe se vérifie par l’expérience mais ne se démontre pas.
- 1° Loi de Newton :
Si un point est indéfiniment éloigné de tout autre, il est soit immobile, soit en mouvement rectiligne
uniforme :
⟹ Pas de force = pas d’accélération
⟹ Principe d’inertie : 𝐹 = 0
- Principe de la masse :
La définition de la masse est issue de ce principe :
⟹ Le rapport des accélérations respectives prisent par 2 points matériels sous l’action d’une même force est
indépendante de celle-ci : 𝑎1
𝑎2=
𝑚2
𝑚1
- 2° Loi de Newton :
La relation qui lie la masse (𝑚) d’un point matériel et son accélération sous l’action d’une force 𝐹 est :
⟹ Principe de l’indépendance des effets de force : 𝐹 = 𝑚.𝑎 (Relation fondamentale de la dynamique)
Attention : Pour un point matériel en translation rectiligne uniforme (𝑉 = 𝑐𝑠𝑡𝑒), on a une accélération
nulle. Dans ce cas on trouve : 𝐹 = 0
- 3° Loi de Newton :
Lorsque deux points sont en présence, les actions mutuelles qu’ils exercent l’un sur l’autre sont égales et
opposées (à distance et au contact) : 𝐹1/2 = −𝐹2/1
Attention : Cette relation traduit que ces 2 AM ont des normes identiques, sont de sens opposées et leurs
support sont parallèles.
𝑅𝑒𝑥𝑡 /𝑠 = 𝐹𝑖
𝑛
𝑖=1
𝑀𝐼𝑒𝑥𝑡 /𝑠 = 𝑀𝐼𝐹𝑖/𝑠
𝑛
𝑖=1
𝑅𝑒𝑥𝑡 /𝑠
𝑀𝐼𝑒𝑥𝑡 /𝑠
𝐹1
𝐹2
𝐹3
𝐹4
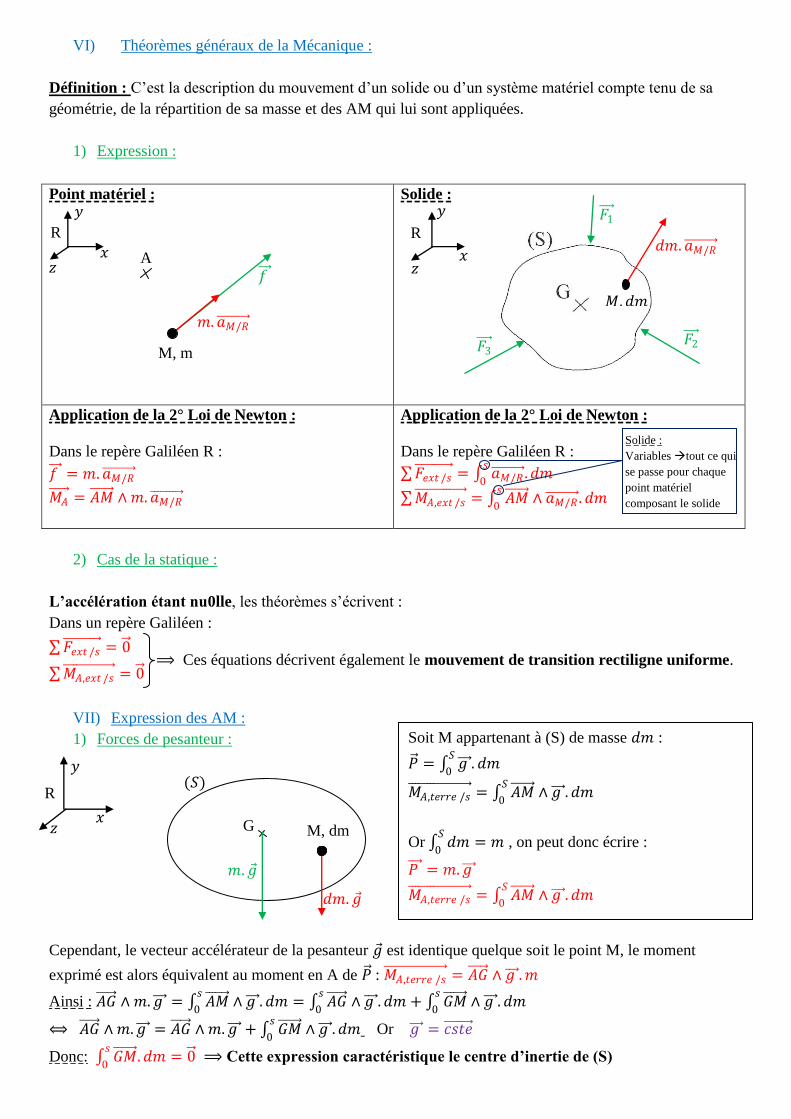
VI) Théorèmes généraux de la Mécanique :
Définition : C’est la description du mouvement d’un solide ou d’un système matériel compte tenu de sa
géométrie, de la répartition de sa masse et des AM qui lui sont appliquées.
1) Expression :
Point matériel :
Solide :
Application de la 2° Loi de Newton :
Dans le repère Galiléen R :
𝑓 = 𝑚.𝑎𝑀/𝑅
𝑀𝐴 = 𝐴𝑀 ∧ 𝑚.𝑎𝑀/𝑅
Application de la 2° Loi de Newton :
Dans le repère Galiléen R :
𝐹𝑒𝑥𝑡 /𝑠 = 𝑎𝑀/𝑅 .𝑑𝑚
𝑠
0
𝑀𝐴,𝑒𝑥𝑡 /𝑠 = 𝐴𝑀 ∧ 𝑎𝑀/𝑅 .𝑑𝑚
𝑠
0
2) Cas de la statique :
L’accélération étant nu0lle, les théorèmes s’écrivent :
Dans un repère Galiléen :
𝐹𝑒𝑥𝑡 /𝑠 = 0
𝑀𝐴,𝑒𝑥𝑡 /𝑠 = 0
⟹ Ces équations décrivent également le mouvement de transition rectiligne uniforme.
VII) Expression des AM :
1) Forces de pesanteur :
Cependant, le vecteur accélérateur de la pesanteur 𝑔 est identique quelque soit le point M, le moment
exprimé est alors équivalent au moment en A de 𝑃 : 𝑀𝐴,𝑡𝑒𝑟𝑟𝑒 /𝑠 = 𝐴𝐺 ∧ 𝑔 .𝑚
Ainsi : 𝐴𝐺 ∧ 𝑚.𝑔 = 𝐴𝑀 ∧ 𝑔 .𝑑𝑚𝑠
0= 𝐴𝐺 ∧ 𝑔 .𝑑𝑚
𝑠
0+ 𝐺𝑀 ∧ 𝑔 .𝑑𝑚
𝑠
0
⟺ 𝐴𝐺 ∧ 𝑚.𝑔 = 𝐴𝐺 ∧ 𝑚.𝑔 + 𝐺𝑀 ∧ 𝑔 .𝑑𝑚𝑠
0 Or 𝑔 = 𝑐𝑠𝑡𝑒
Donc: 𝐺𝑀 .𝑑𝑚𝑠
0= 0 ⟹ Cette expression caractéristique le centre d’inertie de (S)
M, m
A 𝑥
𝑦
𝑧
R
𝑚. 𝑎𝑀/𝑅
𝑓
𝑥
𝑦
𝑧
R
𝐹1
𝐹2 𝐹3
𝑀,𝑑𝑚
𝑑𝑚.𝑎𝑀/𝑅
Solide :
Variables tout ce qui
se passe pour chaque
point matériel
composant le solide
𝑦
𝑥 𝑧
R
G
(𝑆)
M, dm
𝑚.𝑔
𝑑𝑚.𝑔
Soit M appartenant à (S) de masse 𝑑𝑚 :
𝑃 = 𝑔 . 𝑑𝑚𝑆
0
𝑀𝐴,𝑡𝑒𝑟𝑟𝑒 /𝑠 = 𝐴𝑀 ∧ 𝑔 .𝑑𝑚
𝑆
0
Or 𝑑𝑚 = 𝑚𝑆
0 , on peut donc écrire :
𝑃 = 𝑚.𝑔
𝑀𝐴,𝑡𝑒𝑟𝑟𝑒 /𝑠 = 𝐴𝑀 ∧ 𝑔 .𝑑𝑚
𝑆
0
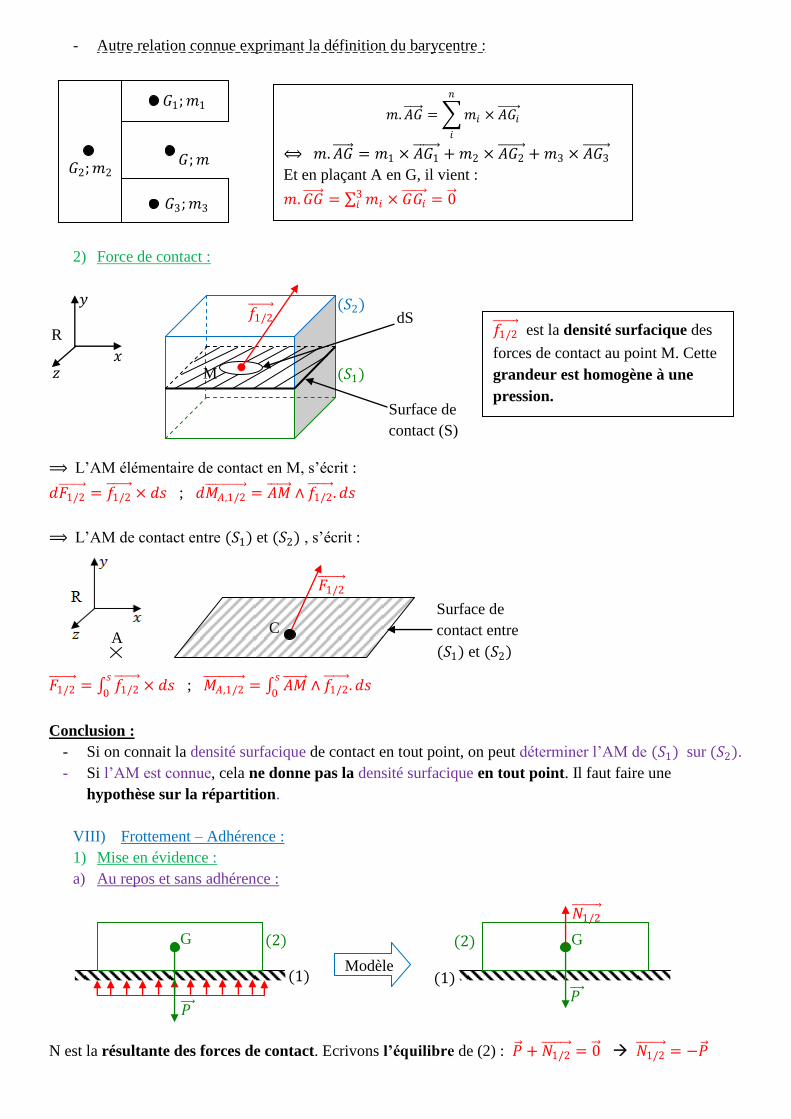
- Autre relation connue exprimant la définition du barycentre :
2) Force de contact :
⟹ L’AM élémentaire de contact en M, s’écrit :
𝑑𝐹1/2 = 𝑓1/2
× 𝑑𝑠 ; 𝑑𝑀𝐴,1/2 = 𝐴𝑀 ∧ 𝑓1/2
.𝑑𝑠
⟹ L’AM de contact entre (𝑆1) et (𝑆2) , s’écrit :
𝐹1/2 = 𝑓1/2
× 𝑑𝑠𝑠
0 ; 𝑀𝐴,1/2
= 𝐴𝑀 ∧ 𝑓1/2 .𝑑𝑠
𝑠
0
Conclusion :
- Si on connait la densité surfacique de contact en tout point, on peut déterminer l’AM de (𝑆1) sur (𝑆2).
- Si l’AM est connue, cela ne donne pas la densité surfacique en tout point. Il faut faire une
hypothèse sur la répartition.
VIII) Frottement – Adhérence :
1) Mise en évidence :
a) Au repos et sans adhérence :
N est la résultante des forces de contact. Ecrivons l’équilibre de (2) : 𝑃 + 𝑁1/2 = 0 𝑁1/2
= −𝑃
𝐺1;𝑚1
𝐺3;𝑚3
𝐺2;𝑚2 𝐺;𝑚
𝑚.𝐴𝐺 = 𝑚𝑖 × 𝐴𝐺𝑖
𝑛
𝑖
⟺ 𝑚.𝐴𝐺 = 𝑚1 × 𝐴𝐺1 + 𝑚2 × 𝐴𝐺2
+ 𝑚3 × 𝐴𝐺3
Et en plaçant A en G, il vient :
𝑚.𝐺𝐺 = 𝑚𝑖 × 𝐺𝐺𝑖 = 0 3𝑖
(𝑆2)
(𝑆1)
dS
Surface de
contact (S)
M
𝑦
𝑥 𝑧
R 𝑓1/2 est la densité surfacique des
forces de contact au point M. Cette
grandeur est homogène à une
pression.
𝑓1/2
Surface de
contact entre
(𝑆1) et (𝑆2)
𝐹1/2
C A
(2) G
(1)
𝑃
Modèle
𝑃
(2)
(1)
G
𝑁1/2
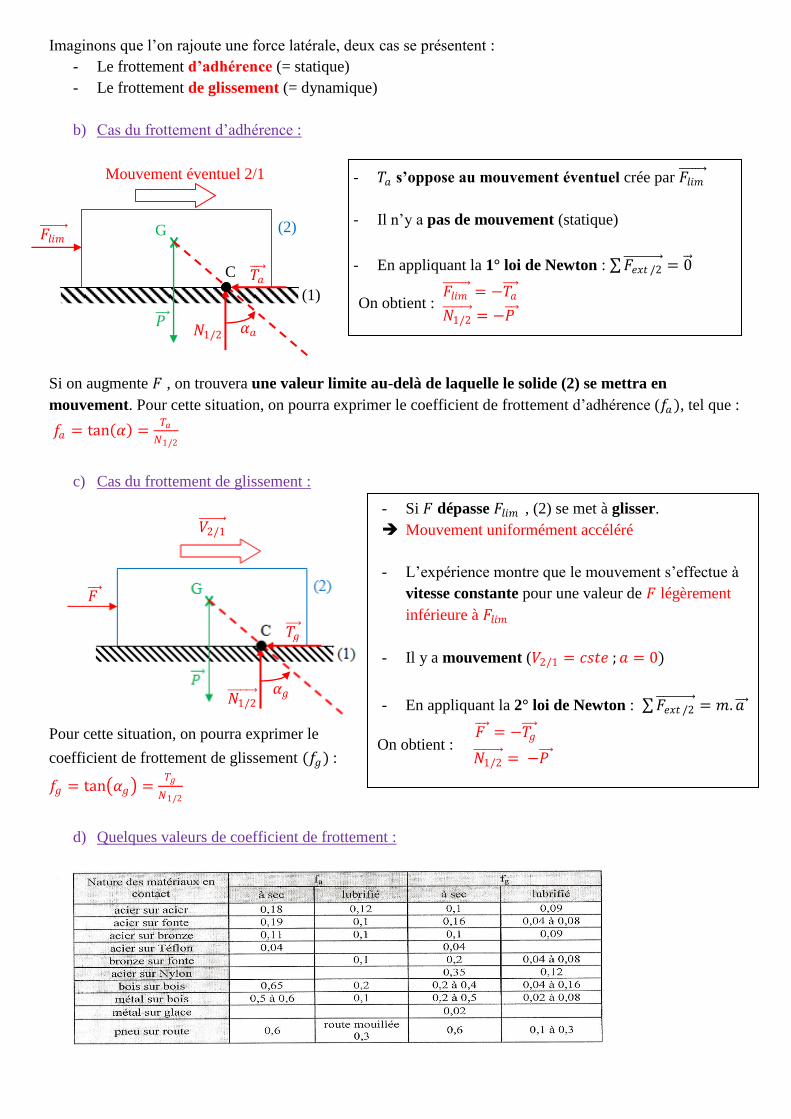
Imaginons que l’on rajoute une force latérale, deux cas se présentent :
- Le frottement d’adhérence (= statique)
- Le frottement de glissement (= dynamique)
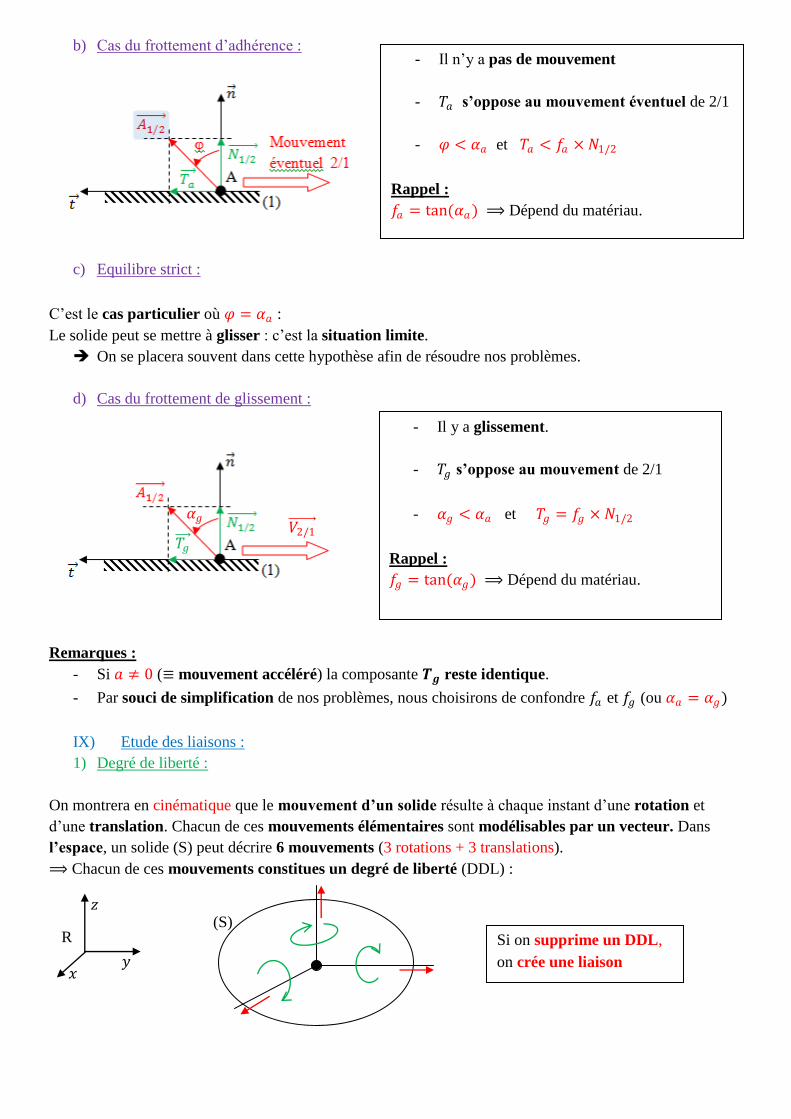
b) Cas du frottement d’adhérence :
Si on augmente 𝐹 , on trouvera une valeur limite au-delà de laquelle le solide (2) se mettra en
mouvement. Pour cette situation, on pourra exprimer le coefficient de frottement d’adhérence (𝑓𝑎), tel que :
𝑓𝑎 = tan 𝛼 =𝑇𝑎
𝑁1/2
c) Cas du frottement de glissement :
Pour cette situation, on pourra exprimer le
coefficient de frottement de glissement (𝑓𝑔) :
𝑓𝑔 = tan 𝛼𝑔 =𝑇𝑔
𝑁1/2
d) Quelques valeurs de coefficient de frottement :
2) Loi de Coulomb :
a)
(2)
C
(1)
G
𝑃
Mouvement éventuel 2/1
𝐹𝑙𝑖𝑚
𝑁1/2
𝑇𝑎
𝛼𝑎
- 𝑇𝑎 s’oppose au mouvement éventuel crée par 𝐹𝑙𝑖𝑚
- Il n’y a pas de mouvement (statique)
- En appliquant la 1° loi de Newton : 𝐹𝑒𝑥𝑡 /2 = 0
On obtient : 𝐹𝑙𝑖𝑚 = −𝑇𝑎
𝑁1/2 = −𝑃
𝐹
𝑉2/1
𝑁1/2
𝛼𝑔
𝑇𝑔
- Si 𝐹 dépasse 𝐹𝑙𝑖𝑚 , (2) se met à glisser.
Mouvement uniformément accéléré
- L’expérience montre que le mouvement s’effectue à
vitesse constante pour une valeur de 𝐹 légèrement
inférieure à 𝐹𝑙𝑖𝑚
- Il y a mouvement (𝑉2/1 = 𝑐𝑠𝑡𝑒 ;𝑎 = 0)
- En appliquant la 2° loi de Newton : 𝐹𝑒𝑥𝑡 /2 = 𝑚.𝑎
On obtient : 𝐹 = −𝑇𝑔
𝑁1/2 = −𝑃
𝑛
b) Cas du frottement d’adhérence :
c) Equilibre strict :
C’est le cas particulier où 𝜑 = 𝛼𝑎 :
Le solide peut se mettre à glisser : c’est la situation limite.
On se placera souvent dans cette hypothèse afin de résoudre nos problèmes.
d) Cas du frottement de glissement :
Remarques :
- Si 𝑎 ≠ 0 (≡ mouvement accéléré) la composante 𝑻𝒈 reste identique.
- Par souci de simplification de nos problèmes, nous choisirons de confondre 𝑓𝑎 et 𝑓𝑔 (ou 𝛼𝑎 = 𝛼𝑔)
IX) Etude des liaisons :
1) Degré de liberté :
On montrera en cinématique que le mouvement d’un solide résulte à chaque instant d’une rotation et
d’une translation. Chacun de ces mouvements élémentaires sont modélisables par un vecteur. Dans
l’espace, un solide (S) peut décrire 6 mouvements (3 rotations + 3 translations).
⟹ Chacun de ces mouvements constitues un degré de liberté (DDL) :
- Il n’y a pas de mouvement
- 𝑇𝑎 s’oppose au mouvement éventuel de 2/1
- 𝜑 < 𝛼𝑎 et 𝑇𝑎 < 𝑓𝑎 × 𝑁1/2
Rappel :
𝑓𝑎 = tan(𝛼𝑎) ⟹ Dépend du matériau.
𝑉2/1
𝑇𝑔
𝛼𝑔
- Il y a glissement.
- 𝑇𝑔 s’oppose au mouvement de 2/1
- 𝛼𝑔 < 𝛼𝑎 et 𝑇𝑔 = 𝑓𝑔 × 𝑁1/2
Rappel :
𝑓𝑔 = tan(𝛼𝑔) ⟹ Dépend du matériau.
R
𝑧
𝑦 𝑥
Si on supprime un DDL,
on crée une liaison
(S)
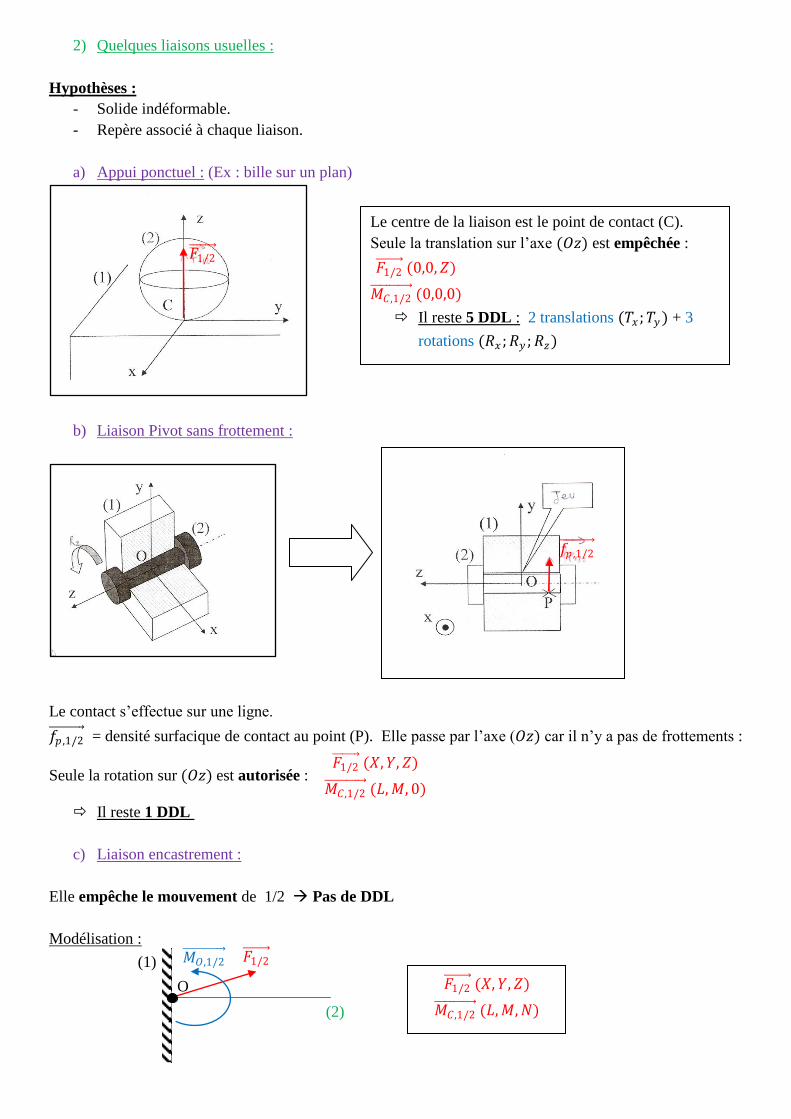
2) Quelques liaisons usuelles :
Hypothèses :
- Solide indéformable.
- Repère associé à chaque liaison.
a) Appui ponctuel : (Ex : bille sur un plan)
b) Liaison Pivot sans frottement :
Le contact s’effectue sur une ligne.
𝑓𝑝 ,1/2 = densité surfacique de contact au point (P). Elle passe par l’axe (𝑂𝑧) car il n’y a pas de frottements :
Seule la rotation sur (𝑂𝑧) est autorisée : 𝐹1/2 (𝑋,𝑌,𝑍)
𝑀𝐶,1/2 (𝐿,𝑀, 0)
Il reste 1 DDL
c) Liaison encastrement :
Elle empêche le mouvement de 1/2 Pas de DDL
Modélisation :
O
(2)
(1) 𝐹1/2 𝑀𝑂,1/2
𝐹1/2 (𝑋,𝑌,𝑍)
𝑀𝐶,1/2 (𝐿,𝑀,𝑁)
Le centre de la liaison est le point de contact (C).
Seule la translation sur l’axe (𝑂𝑧) est empêchée :
𝐹1/2 (0,0,𝑍)
𝑀𝐶,1/2 (0,0,0)
Il reste 5 DDL : 2 translations (𝑇𝑥 ;𝑇𝑦) + 3
rotations (𝑅𝑥 ;𝑅𝑦 ;𝑅𝑧)
𝐹1/2
𝑓𝑝 ,1/2
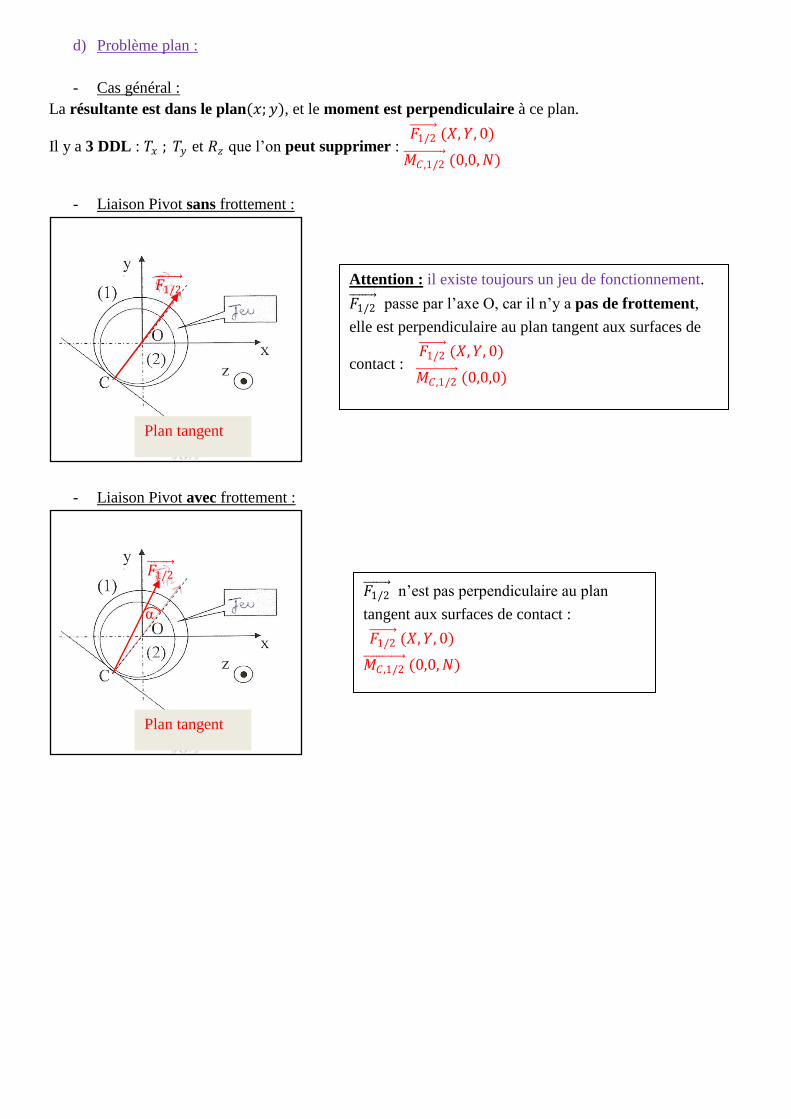
d) Problème plan :
- Cas général :
La résultante est dans le plan(𝑥;𝑦), et le moment est perpendiculaire à ce plan.
Il y a 3 DDL : 𝑇𝑥 ; 𝑇𝑦 et 𝑅𝑧 que l’on peut supprimer : 𝐹1/2 (𝑋,𝑌, 0)
𝑀𝐶 ,1/2 (0,0,𝑁)
- Liaison Pivot sans frottement :
- Liaison Pivot avec frottement :
Attention : il existe toujours un jeu de fonctionnement.
𝐹1/2 passe par l’axe O, car il n’y a pas de frottement,
elle est perpendiculaire au plan tangent aux surfaces de
contact : 𝐹1/2 (𝑋,𝑌, 0)
𝑀𝐶,1/2 (0,0,0)
Plan tangent
𝐹1/2
𝐹1/2 n’est pas perpendiculaire au plan
tangent aux surfaces de contact :
𝐹1/2 (𝑋,𝑌, 0)
𝑀𝐶,1/2 (0,0,𝑁)
Plan tangent
𝐹1/2
α