Embed Size (px)
Citation preview

1164 OPTICS LETTERS / Vol. 19, No. 15 / August 1, 1994
Theoretical analysis of a distributed polarimetric sensorwith birefringent optical fibers in noncoherent light
Youssef Belgnaoui and Fransois Picherit
Centre de Physique Mol6culaire Optique et Hertzienne, Centre National de la Recherche Scientifique, UA 283,Universit6 de Bordeaux 1, 33405 Talence, France
Marc Turpin
Laboratoire Central de Recherches, Thomson-CSF, Domaine de Corbeville, 91404 Orsay, France
Received February 15, 1994
We have studied the influence of the angular rotations among four birefringent optical fibers on the performanceof a system of intrinsic sensors in noncoherent light. The results obtained by the Jones formalism show thatangular rotations of the order of 5' are sufficient to yield the visibility required for detection of the parametersof interest. As the angular rotations come closer to 1°, which is experimentally more difficult, the signal hasbetter contrast.
The properties of intrinsically birefringent opticalfibers (and also of optical fibers with induced bire-fringence) have been exploited to make sensors bylow-coherence multiplexing techniques.', The bire-fringence of these fibers varies with temperature,pressure, and other physical parameters, dependingon the fibers' structure and/or conditioning. By con-necting several birefringent optical fibers in series insuch a way as to establish angular rotations amongthe principal axes of each of them, one obtains a sys-tem of quasi-distributed sensors. Each element ofthe sensor is made up of an optical fiber in whicheach wave train emitted by the light source generatestwo wave trains with crossed polarizations. Throughpropagation these two wave trains are decorrelated ifthe optical path difference between the two modes isgreater than the coherence length of the source inthe birefringent fiber.
The detection system is made up of a two-wave in-terferometer (i.e., Michelson or Mach-Zehnder) thatcompensates for the phase delay induced by the sen-sors. Information about the phase delay (path dif-ferences) is directly related to the distance betweenthe sets of fringe, recorded on the interferogram.For this information to be measurable, the couplingpoints (angle of rotation) must be chosen to optimizethe signal-to-noise ratio and eliminate ambiguitiesthat are due to useless fringe systems. The pur-pose of our research is therefore to study the influ-ence of the coupling points on the output signal ofthe detection interferometer and to determine howthese points affect the sensitivity of the system ofdistributed sensors. The object of this Letter is topresent a model applied to a system of four opticalfibers along with the corresponding calculations.
Using the Jones formalisms and the matrices andvectors corresponding to the propagation of a polar-ized light wave in the birefringent optical fibers, wedetermine the transfer function of a sensor systemcontaining four sensing elements (i.e., four birefrin-
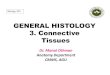
gent fibers). Taking into account the propagation inthe four birefringent fibers as well as in the polariz-ers placed at the input and at the output of the foursensing elements (see Fig. 1), we calculated the theo-retical expression of the detected signal of the outputof the receiving interferometer.
Let us denote by di the optical path difference in-duced by the ith fiber between the light travelingalong the fast axis and that traveling along the slowaxis. Obviously, this path difference di depends onthe length of fiber i, the fiber birefringence, and thevalue if the physical parameter at which the birefrin-gence of this fiber is sensitive. do is the path differ-ence induced between the two arms of the detectioninterferometer.
We also need to know the angular positions of theaxes of the fibers with respect to one another as wellas the angle between the entering light wave andthe axes of the first optical fiber and the angularposition of the axes at the end of the fourth fiberwith respect to the axis of the analyzer. These an-gles are denoted as follows: a, is the angle betweenthe entering polarized wave and the axes of the firstfiber, a, is the angle between the axes of the (i - l)thand the ith fibers (i = 2-4), and A is the angle be-tween the principal axis of the analyzing polarimeterand the axes at the end of the fourth fiber.
Fig. 1. Experimental arrangement of a distributed po-larimetric sensor. O.F.'s, optical fibers.
0146-9592/94/151164-03$6.00/0 © 1994 Optical Society of America

August 1, 1994 / Vol. 19, No. 15 / OPTICS LETTERS 1165
0.5
1r(do)
0.4
0.3
0.2 -
0.1 -
200 400 000
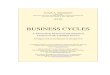
Fig. 2. Theorical interferogram with a1, a2 , a3, and a4equal to 25'. Ir(do) = I(do)/Eo2 is the relative intensityof the interferometric signal.
For a source with coherence length Lcoh, the mathe-matical expression of the signal detected at the detec-tion end of the interferometer is made up of severalterms:
(1) AO cos wodo. exp - (do/Lcoh) 2, which corre-
sponds to the fringe system of maximum intensityobtained when the two arms of the detection inter-ferometer induce a zero path difference (do = 0).The interference fringe of maximum amplitude cor-responds to the zero point of the apparatus. Themaximum amplitude of this fringe system is con-stant regardless of the value of the angles a1, a2, a3,and a4 when the angle A is fixed at 45°. Its value isAO = Eo2/4, where Eo is the electric-field amplitudeof the light wave introduced into the fiber network.
(2) A term depending on angles a1 , a2 , a3 , a 4, and, by means of a sum of products of sines and cosinesbut independent of do. This is a constant term cor-responding to the mean intensity at the output of thedetection interferometer.
(3) Terms of the form Ad cos wod exp -(d/Lcoh)2and Ad cos wo (d + do) exp -[(d + do)/Lcoh] 2 . Ad de-pends on a1, a2, a3, a4 and tL by a product of sinesand cosines. d represents all the possible path dif-ferences that can be induced by the system. d is alinear combination of path differences d1, d2, d3, andd4 such that d = dl,...,d 4,d± + d2,...,d 3 - d4,di +d2 - d3,d2 - d3 - d4,...,di + d2 + d3 + d4. In ourcase of four sensors there are forty such combina-tions. If the path differences di are chosen such thatdi >> Lcoh, these terms will result in fringe systemsof only negligible amplitude (for do Ž 0). They justadd to the noise of the system, except for the particu-lar case in which the elements of one of those combi-nations d cancel each other; then the correspondingamplitude Ad is added to the signal mean intensity.This term does not give interference fringes.
(4) Terms of form Ad cos wo(d - do) exp -[(d -do)/LCOh]2. Each of these terms gives a set of interfer-ence fringes centered around do = d (when the pathdifference between the two arms of the interferom-eter is equal to d). These fringes have their am-
plitude modulated by Ad exp - [(d - do)/LCoh]2 andtherefore have a Gaussian envelope (i.e., the wrap-ping function of the whole fringe system looks like aGaussian). The fringe of maximum intensity is ob-tained for d = do and has an intensity of Ad. As dobecomes larger, fringe systems appear, all centered atdo = d but of different amplitudes (Fig. 2). Becausethere are a large number of possible path differencesd within the system (they are linear combinations ofdifferences di), some of them may almost be equal.In this case, the fringe systems are partially or to-tally superimposed, making the interferogram diffi-cult to interpret. Any condition on the delays di caneliminate simultaneously all the undesirable fringesystem superpositions.
As one can see, the appearance of too large anumber of fringe systems does not make for aneasy determination of the path differences di ofthe four optical fibers. Because the amplitudes Adof all the interference systems are a direct func-tion of the coupling angles, we studied the be-
3000
A,,
2000
1000
8 12D0gre
Fig. 3. Ad4 /Ap as a function of a1 , a2,tween 0.5° and 160.
A,A,
a3, and a4 be-
0 2 4 8 8 10 12 14 18Degrees
Fig. 4. Variations of the visibility of the main fringesystems with respect to the central fringe system (Ad4/Ao)as a function of a1 , a2 , a3 , and a4 between 0.5° and 16'.
I
Todo)
is
0.20

1166 OPTICS LETTERS / Vol. 19, No. 15 / August 1, 1994
I r(d o)
0.4
0.3
0.2
0.1
0.0 . I... .................... ................0 200 d soo
Fig. 5. Theorical interferogram with a,, a2, a3, and a4equal to 5'. Ir(do) = I(do)/EJ is the relative intensity ofthe interferometric signal.
havior of all these fringe systems as a functionof these angles to determine which combinationsof coupling angles will reduce the interferogram toexactly four distinct systems corresponding to thefollowing information-carrying combinations: d4,d3 + d4, d2 + d3 + d4, and d 1+ d2 + d3 + d4. Oncethis situation is obtained, it will be easy to calculatethe path differences di (of sensor i) by simply solvinga set of equations.
To study the behavior of the interferogram as afunction of the coupling angles, we first set the an-gle ,u to 45'. Thus we have equivalent contribu-tions from the electromagnectic-field components ly-ing along the principal axes of the last optical fiberof the system.
Preliminary calculations show that when a1, a2,a3, and a4 have values of less than 25', the am-plitudes of the four systems whose positions withrespect to the central system we chose to detect dom-inate all other interference figures of the interfero-gram. Next, we decided to give the same value to allangles a1 (i = 1-4) and studied the behavior of theinterferogram and that of the amplitudes of all theinterference systems that it contains as these angleswere varied. The amplitude evolution study of allspurious terms as a function of the angles shows thatthe maximum amplitude fringe systems are centeredatd 1 + d2 + d4 , d1 + d3 + d4, d1 + d2 - d4 , and d1 -d3 - d4 for every angular value. The Ap amplitude
of one of those fringe systems is
E 2 .AP = 1° sin 2 a, cos 2
a 2 sin 2a3 sin 2a4 sin 2,u.
Among the four fringe systems that we have selectedto detect, regardless of the value of the angles, thesmallest amplitude is always located at d4. The Ad 4amplitude is given by
Ad 4 = 8° cos 2a1 cos 2a 2 cos 2a3 sin 2a 4 sin 2,u.
We have calculated the extreme amplitude ratio, thatis, Ad4/Ap. Figure 3 shows how this ratio varieswith the angles between 16' and 0.50. The AP am-plitude decreases by 88 dB, whereas Ad4 decreasesby 25 dB.
The main fringe system amplitude is so weak thatthe angles' values are diminished. Figure 4 showsthe main fringe system visibility with regard to thecentral fringe system between 16' and 0.5°. Thiscurve corresponds to the Ad4/Ao ratio evolution withrespect to the angles.
As an example, Fig. 5 shows a simulated interfer-ogram for coupling angles of 5', which correspondsto a power coupling rate of 7.6 X 10-3 on one axis.Four fringe systems appear clearly for the four de-sired interferometer path differences: do = d4, d3 +d4, d2 + d3 + d4, and d1 + d2 + d3 + d4. In thisexample, the amplitude of the useless fringe systemsis smaller than that of the main systems by 36 dB.
In conclusion, one could have thought it necessaryto use very small coupling angles, of the order of 1',which are difficult to realize. Our study shows thatin many experimental cases coupling angles of a fewdegrees give satisfying results and that the uncer-tainty of their value is not critical. We have noticedthat for three and four fibers the ratio Amjn/Ap ispractically the same. The difference consist in themain fringe system visibility attenuation with re-spect to the central fringe system when the numberof fibers increases.
References
1. F. Picherit and J. L. Mineau, Opt. Commun. 79, 295(1990).
2. M. Turpin, M. Brevignon, J. P. LePesant, and 0. Gaou-ditz, presented at Optical Fiber Sensors Conference,1992.
3. V. Gusmeroli and M. Martinelli, Opt. Lett. 14, 1330(1989).