Embed Size (px)
Citation preview
Linux et le Temps réel - 15 Octobre 2015 1
www.ciose.fr
Linux et le Temps réelLinux et le Temps réelPartie 1Partie 1
C. CharreyreC. [email protected]@ciose.fr
http://www.ciose.frhttp://www.ciose.frhttps://twitter.com/CIOinfoindushttps://twitter.com/CIOinfoindushttp://fr.slideshare.net/charreyrehttp://fr.slideshare.net/charreyre
Linux et le Temps réel - 15 Octobre 2015 2
www.ciose.fr
Licence
Attribution-Noncommercial-Share Alike 4.0 International
You are free:
to Share - copy and redistribute the material in any medium or format
to Adapt - remix, transform, and build upon the material
The licensor cannot revoke these freedoms as long as you follow the license terms.
Under the following conditions:
Attribution — You must give appropriate credit, provide a link to the license, and indicate if changes were made. You may do so in any reasonable manner, but not in any way that suggests the licensor endorses you or your use.
NonCommercial — You may not use the material for commercial purposes.
ShareAlike — If you remix, transform, or build upon the material, you must distribute your contributions under the same license as the original.
No additional restrictions — You may not apply legal terms or technological measures that legally restrict others from doing anything the license permits.
License text : http://creativecommons.org/licenses/by-nc-sa/4.0/legalcode
Linux et le Temps réel - 15 Octobre 2015 3
www.ciose.fr
CIO en quelques mots
Société d'ingénierie en systèmes embarqués : électronique et logiciel
Au service de nos clients depuis 1990
15 spécialistes en embarqué et temps réel
Expert en Linux embarqué depuis 2000, OpenEmbedded et Yocto depuis 2008
CA annuel : 1 500 000 €
Siège à Saint-Étienne
Agence à Marseille
Agréé CIR
Linux et le Temps réel - 15 Octobre 2015 4
www.ciose.fr
C. Charreyre en quelques mots
Associé au sein de CIO
Responsable des technologies Linux embarqué
Formateur Linux embarqué (avec Captronic et en direct)
30 ans dans l'embarqué et le monde Unix / Linux
Fervent promoteur du logiciel libre
Membre de Medinsoft – Commission Logiciel Libre
Linux et le Temps réel - 15 Octobre 2015 5
www.ciose.fr
Caractéristiques d’unsystème Temps Réel
Principales caractéristiques attendues :Délai de réponse à une IT borné et connuPossibilité d’activer une tâche de manière périodique avec un jitter bornéScheduling basé sur un niveau de priorité fixeGestion fine du temps
Linux et le Temps réel - 15 Octobre 2015 6
www.ciose.fr
Caractéristiques de Linux
Linux est un OS de la classe généraliste (comme Windows)
Le but principal de l’OS est d’affecter le processeur à tous les process sur une durée moyenne :
Le scheduler privilégie l’avancée de tous les process au détriment du déterminismeTous les process obtiennent le processeur au bout d’un certain tempsIl existe une priorité « temps réel » (sched_setscheduler() avec SCHED_FIFO ou SCHED_RR)
En pratique, elle ne permet pas d’obtenir des performances de temps réel dur
Linux et le Temps réel - 15 Octobre 2015 7
www.ciose.fr
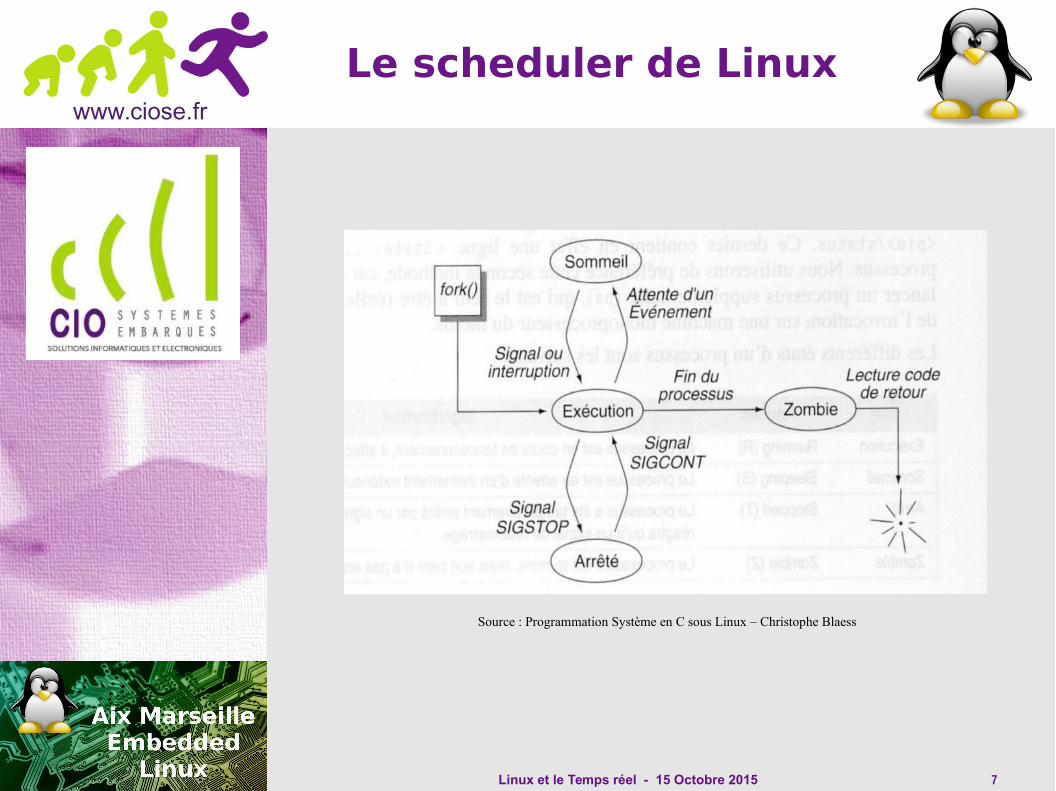
Le scheduler de Linux
Source : Programmation Système en C sous Linux – Christophe Blaess

Linux et le Temps réel - 15 Octobre 2015 8
www.ciose.fr
États d'un processus
Un processus en sommeil attend une ressource ou un événement extérieur
C'est le kernel qui place le processus en sommeil
ex: écriture sur un device lent, le driver met le processus en sommeil puis le rend de nouveau éligible
Deux types de mises en sommeil : interruptible : réveil sur l'arrivée d'un signal
ininterruptible : réveil seulement sur l'arrivée d'une interruption au niveau du kernel (cf ex. ci dessus)
Transitions entre les états Running et Stopped liées aux signaux SIGSTOP et SIGCONT

Linux et le Temps réel - 15 Octobre 2015 9
www.ciose.fr
Fonctionnementmulti tâches - Priorité
Le noyau doit assurer la répartition du processeur entre les différents processus
Les transitions entre états s'effectuent sous le contrôle du noyau
Lorsqu'un processus s'endort, le noyau réattribue immédiatement le processeur à un autre processus en attente
Cependant, cela ne suffit pas pour assurer une bonne répartition du processeur
Le noyau préempte un processus actif pour réattribuer le processeur sur la base des critères d'ordonnancement
Linux est un système multi tâches préemptif
Linux et le Temps réel - 15 Octobre 2015 10
www.ciose.fr
Fonctionnementmulti tâches - Priorité
Un processus préempté passe à l'état Ready
De même un processus à l'état Sleeping qui se réveille passe par l'état Ready, et éventuellement après à l'état Running
Pour élire un processus, Linux se base sur 2 priorités :
valeur statique affectée au processus au démarrage (peut être partiellement modifiée par appel système)
valeur dynamique remise à jour à chaque scheduling du processus, fonction de la priorité statique et autres facteurs
plus le processus utilise le temps CPU imparti, plus sa priorité dynamique baisse et vice versa
plus un processus a une priorité dynamique élevée, plus le processus obtient une tranche de temps longue
mécanisme destiné à établir un temps partagé entre les processus, et à assurer une avancée de tous (classe d'OS généraliste type Windows...)

Linux et le Temps réel - 15 Octobre 2015 11
www.ciose.fr
Mécanismes d'ordonnancement
3 types d'ordonnancement possibles, définis au niveau du processus :
FIFO
Round Robbin
Other
Ordonnancement FIFO :Principe de file attente
Une liste de processus par priorité statique
Le 1er processus de la file de + haute priorité s'exécute jusqu'à ce qu'il relâche le processeur
Il est alors repoussé en fin de liste
Si aucun autre processus prêt à cette priorité, passage aux priorités moindres
Linux et le Temps réel - 15 Octobre 2015 12
www.ciose.fr
Mécanismes d'ordonnancement
Ordonnancement FIFO (suite) :Dès qu'un processus de priorité supérieure est de nouveau prêt, attribution immédiate du processeur
Type d'ordonnancement le plus égoïste car un processus de plus forte priorité peut mobiliser le processeur en permanence
Linux et le Temps réel - 15 Octobre 2015 13
www.ciose.fr
Mécanismes d'ordonnancement
Ordonnancement Round Robbin :Variante de l'ordonnancement FIFO
Au sein d'un niveau de priorité, chaque processus dispose d'une tranche de temps fixe.
A la fin de celle-ci, il est interrompu, mis dans l'état Prêt, et repoussé à la fin de la liste de ce niveau de priorité
Ceci introduit une notion de partage du temps au sein d'un niveau de priorité
Ordonnancement OtherOrdonnancement par défaut de Linux
Calcul d'une priorité dynamique en fonction de la priorité statique et de la consommation du processeur
Influe sur quantum de temps attribué
Linux et le Temps réel - 15 Octobre 2015 14
www.ciose.fr
Caractéristiques de Linux
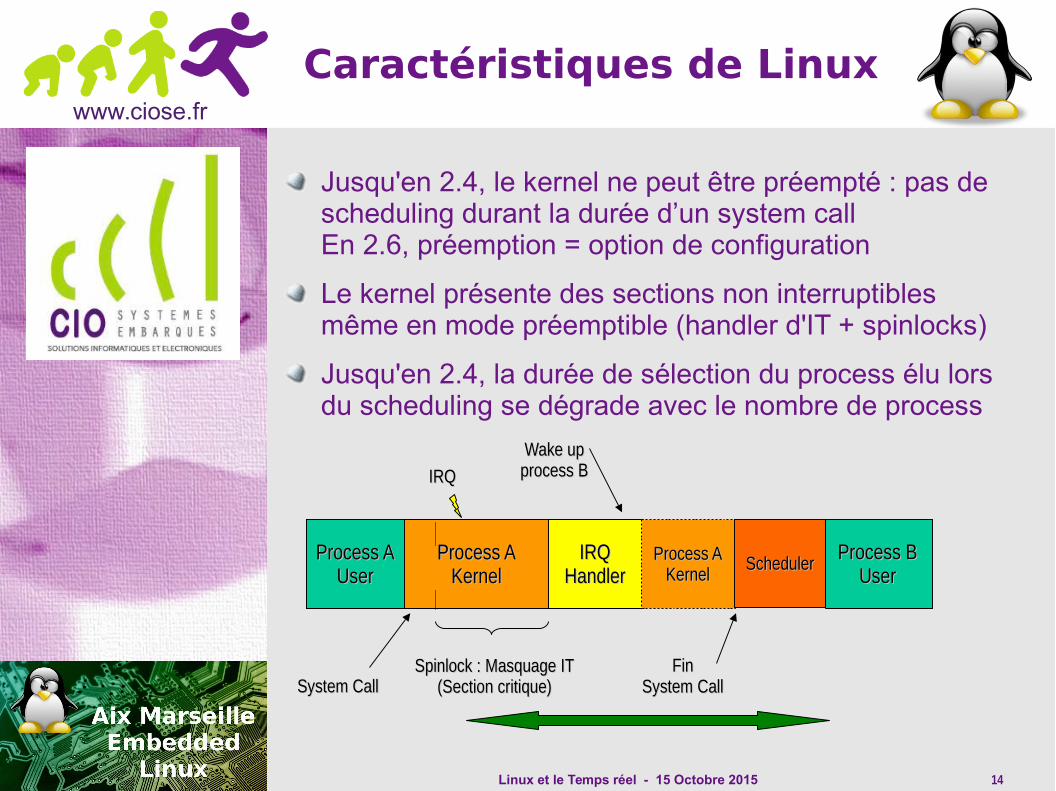
Jusqu'en 2.4, le kernel ne peut être préempté : pas de scheduling durant la durée d’un system callEn 2.6, préemption = option de configuration
Le kernel présente des sections non interruptibles même en mode préemptible (handler d'IT + spinlocks)
Jusqu'en 2.4, la durée de sélection du process élu lors du scheduling se dégrade avec le nombre de process
Process AProcess AUserUser
System CallSystem Call
Process AProcess AKernelKernel
Spinlock : Masquage ITSpinlock : Masquage IT(Section critique)(Section critique)
IRQIRQ
IRQIRQHandlerHandler
Process AProcess AKernelKernel
FinFinSystem CallSystem Call
SchedulerScheduler Process BProcess BUserUser
Wake upWake upprocess Bprocess B
Linux et le Temps réel - 15 Octobre 2015 15
www.ciose.fr
Solutions vers le Temps Réel
Optimisation du code système :Réduction des sections critiques dans le code kernelIntroduction de points de rescheduling dans les systems calls
Création de patches du kernel
Utilisation d’une extension temps réel
Linux et le Temps réel - 15 Octobre 2015 16
www.ciose.fr
Kernel Preemptive patch – Linux 2.4
Kernel preemptive patch : – http://kpreempt.sourceforge.net
Solution MontaVista (commerciale)
Ce patch traite la non préemptabilité du kernel standard
Le patch ne peut rien contre les spinlocks de longue durée présents dans le code kernel (protection des sections critiques)
Linux et le Temps réel - 15 Octobre 2015 17
www.ciose.fr
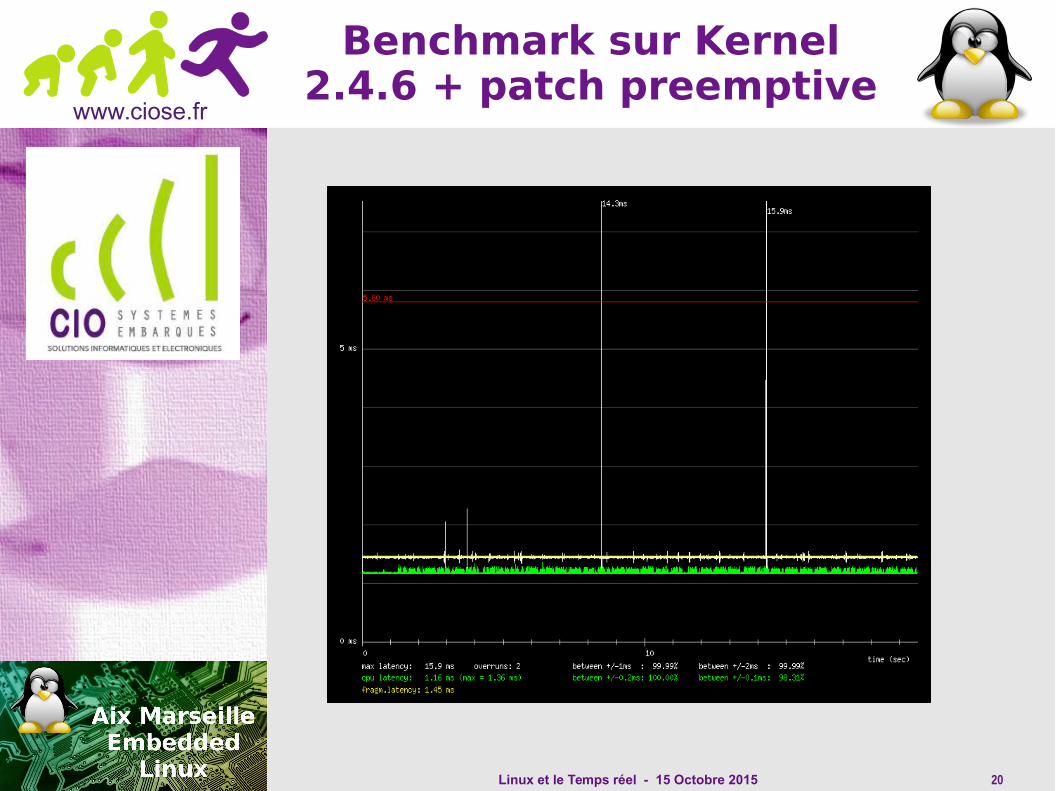
Benchmark du preemptive patch
Résultats du benchmark Audio latency(http://www.gardena.net/benno/linux/audio/) avec et sans patch preemptive kernel
while(1){ time1=my_gettime(); waste 80% of the CPU of the duration of one audio
fragment (noop loop) time2=my_gettime(); write(audio_fd,playbuffer,fragmentsize); time3=my_gettime();}
Linux et le Temps réel - 15 Octobre 2015 18
www.ciose.fr
Benchmark du preemptive patch
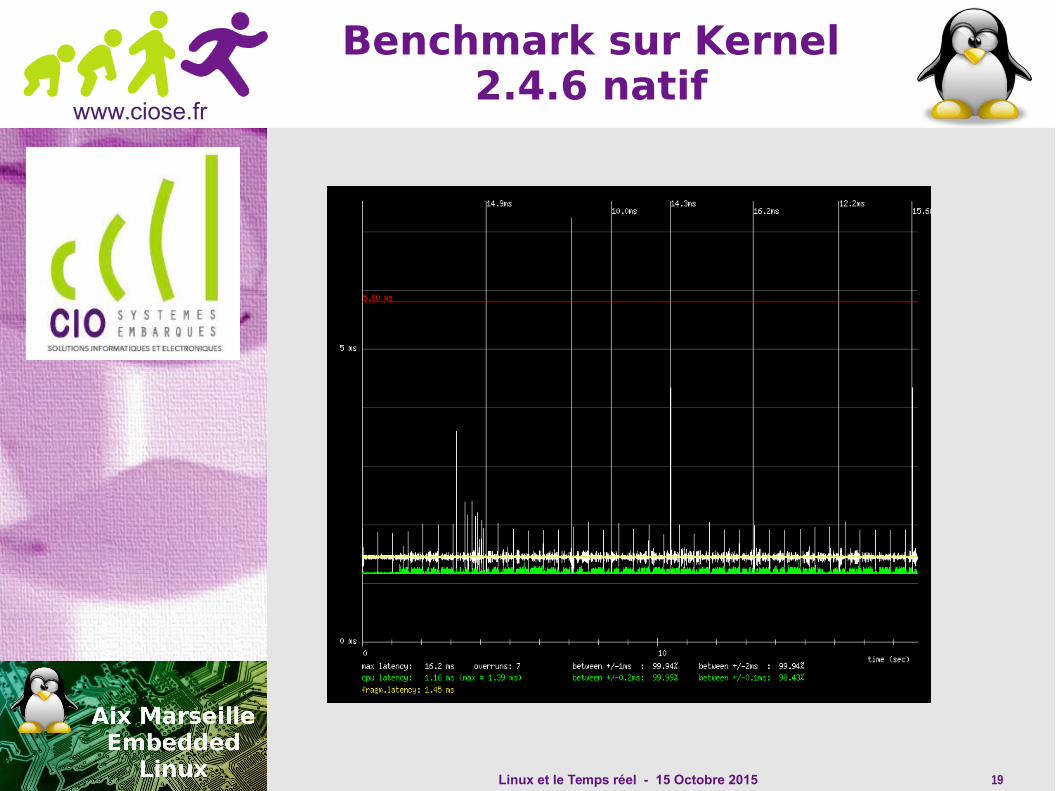
Graphiques pour le cas de test ‘Write disk stress’ :
Mesures de latence de traitement d’échantillons audio sous diverses conditions de stressWrite disk stress consiste à copier un très gros fichier sur le disque durLigne jaune = durée d’un échantillon audioLigne blanche = durée de traitement mesurée = time3 – time1Ligne verte = simulation de traitement calée sur 80% de la durée de l’échantillon = time2 – time1
Linux et le Temps réel - 15 Octobre 2015 19
www.ciose.fr
Benchmark sur Kernel 2.4.6 natif
Linux et le Temps réel - 15 Octobre 2015 20
www.ciose.fr
Benchmark sur Kernel 2.4.6 + patch preemptive
Linux et le Temps réel - 15 Octobre 2015 21
www.ciose.fr
Real Time Scheduler patch – Linux 2.4
Real Time scheduler patchhttp://rtsched.sourceforge.net/ ou
Solution MontaVista (commerciale)
Ces solutions créent un scheduler temps réel efficace au dessus du scheduler Linux.
Le scheduler TR traite les priorités SCHED_RR et SCHED_FIFO et passe la main au scheduler Linux pour les autres cas.
Ce patche traite la dégradation du temps de sélection du process élu du kernel standard (algorithme en O(n))
Ne sert plus sur un kernel 2.6.x qui a un algorithme en O(1)

Linux et le Temps réel - 15 Octobre 2015 22
www.ciose.fr
CONFIG_PREEMPT_RT Patch
Patches précédent dédiées aux vieux kernels (2.4)
Actuellement : linux-rt (CONFIG_PREEMPT_RT patch)
Patch qui est géré dans la branche linux-rt de Ingo Molnar
Applicable sur kernels 2.6.x et 3.x
Suit les versions de kernel vanilla
Rend le kernel presque entièrement préemptible, y compris pour les spinlocks et les handlers d'IRQ
Remplace les spinlocks par des mutexes avec héritage de priorité
Les IRQ handlers deviennent des threads kernel
Voir https://rt.wiki.kernel.org/index.php/Main_Page
Linux et le Temps réel - 15 Octobre 2015 23
www.ciose.fr
CONFIG_PREEMPT_RT Patch
Des inquiétudes sur la soutenabilité (développeurs + funding) jusqu'à Q3 2015
Annonce début Octobre de la création d'un projet RTL (Real Time Linux) sous l'égide de Linux Foundation, basé sur ce patch
Objectif ultime : merge du patch dans le kernel upstream ?
Linux et le Temps réel - 15 Octobre 2015 24
www.ciose.fr
Extensions temps réel
Idée : disposer d’un RTOS en dessous du kernel Linux
Linux tourne comme tâche idle du RTOS
Nécessité de partager le développement entre éléments Real Time et éléments Linux
Des IPC pour échanger entre composants RT et composants Linux
Linux et le Temps réel - 15 Octobre 2015 25
www.ciose.fr
Extensions temps réel
Les principales solutions :RTLinux divisé en 2 produits
RTLinux Free qui relève de la licence GPL et de la licence Open RTLinux Patent License. Ne semble plus téléchargeable.RTLinux Pro qui relève d’une licence commerciale (Wind River)
RTAI et plus récemment Xenomai qui relèvent de la licence GPL
RTAI développé par Institut Polytechnique de Milan https://www.rtai.org/Xenomai (http://www.xenomai.org/) implémente des skins des RTOS traditionnels
Linux et le Temps réel - 15 Octobre 2015 26
www.ciose.fr
Principe de fonctionnement
Application d’un patch sur le kernel pour permettre l'utilisation de l'extension temps réel.
RTOS additionnel sous forme de Kernel Module(s)
Développement de tâches du RTOS sous forme de kernel modules ou de process Linux (LXRT / Xenomai)
Le scheduler Linux ne gère pas les tâches temps réel et ne fonctionne que lorsque le RTOS lui laisse le processeur





























