Embed Size (px)
DESCRIPTION
Citation preview

Prototypage des systèmes embarqués
Nicolas Dulac 1, Sébastien Boisgérault 2, Bruno Steux 2
1Intempora
2, place Jules Gévelot � 92130 Issy-Les-Moulineaux, France
2CAOR, Centre de Robotique, Mines ParisTech,
60, boulevard Saint Michel � 75272 Paris Cedex 06, France
[email protected] � [email protected] � [email protected]
Depuis plus de dix ans, le pôle �Architecture Logicielle et Systèmes Embarqués� du CAOR développe des plate-formeslogicielles répondant aux besoins des concepteurs de systèmes robotiques mobiles et de systèmes de transport intelligents.Ces activités ont donné lieu en 1998 et 1999 au développement de la technologie RTMaps[3] � pour �Real-Time
Multi-sensor Advanced Prototyping Software� � suivi en octobre 2000, de la création de la société Intempora[7]. Cedéveloppement technologique se prolonge aujourd'hui au travers du projet AROS[1] du CAOR.Récemment, le CAOR a également initié une activité pour la conception d'interfaces homme-machine dédiées aux
systèmes automobiles[5]. Cette activité répond à l'utilisation accrue d'écrans embarqués � notamment sur les véhiculeshaut de gamme et les prototypes � qui viennent compléter ou se substituer aux systèmes d'informations et de contrôleclassiques.
I. RTMaps, histoire d'un transfert technologique réussi
En 1997, Bruno Steux (aujourd'hui enseignant-chercheur au CAOR) et Pierre Coulombeau entament leur thèse auCentre de Robotique sur des systèmes embarqués de perception par fusion de données (détection de lignes blanches,détection d'obstacles par fusion vision + radar, . . . ). Par souci d'e�cacité, et pour pouvoir se consacrer aux recherchesscienti�ques plutôt qu'aux problèmes communs de programmation, ils consacrent une année au développement d'unetechnologie modulaire pour le prototypage rapide d'applications temps-réel multi-capteurs : la technologie RTMaps. En2000, le projet européen CarSense dirigé par FIAT est à la recherche d'un outil permettant l'enregistrement simultanéet synchronisé des données de multpiles capteurs (caméras, lidars, radars, GPS, sonars, . . . ). RTMaps est retenu, et lasociété Intempora est créée a�n de poursuivre le développement de l'outil et d'en assurer sa commercialisation, ceciavec le soutien de l'ANVAR (devenu OSEO) et de ses premiers clients. Aujourd'hui, Intempora compte bon nombre deréférences industrielles prestigieuses en France et à l'étranger, telles que VALEO, RENAULT, PSA, THALES, ICHIKOH(Japon) mais aussi dans le domaine académique l'INRIA, l'INRETS, le LCPC, le SwRI (USA), Q.U.T. (Australie), etc.
Le partenariat fort liant Intempora et le Centre Robotique s'est poursuivi dans le cadre de projets de recherchenationaux et européens tels que PUVAME, REACT et COM2REACT. Aujourd'hui encore, forts de cette expérience,nous travaillons ensemble dans le cadre des projets Edona[4] orienté vers la conception d'IHM embarquées, et AROS[1](Agile Robust Operating Service) � un projet auquel collaborent également VALEO et l'INRIA � visant au développementd'une nouvelle plateforme de développement pour l'embarqué et les systèmes distribués.
II. L'outil RTMaps
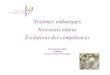
Dans les domaines de la perception et du contrôle embarqués, quece soit en robotique, automobile, ou surveillance, la diversité des tech-nologies à mettre en oeuvre, en terme d'interfaces matérielles et d'al-gorithmes, nécessite l'utilisation d'outils performants et hautementmodulaires.RTMaps permet la mise en oeuvre rapide et l'intégration facile decapteurs hétérogènes et asynchrones (caméras, bus CAN, GPS, li-dars, radars, centrales inertielles, capteurs IP, série, etc.)Le modèle de développement par composants permet d'assurer l'évo-lutivité des applications ainsi que la capitalisation des travaux e�ec-tués. Un SDK (Software Development Kit) en C/C++ permet audéveloppeur d'écrire lui-même ses propres composants et d'y intégrerses algorithmes.Les fonctionnalités de datation précise de chaque échantillon de don-née entrant dans le système, associées à un moteur d'exécution multi-threads, permettent de gérer e�cacement lesproblématiques de la fusion de données.

Les fonctions d'enregistrement et de rejeu temps-réel des �ux de données capteurs permettent d'une part de travaillersur table à l'aide de scénarios de données réelles préalablement enregistrées en se replaçant dans le conditions de fonc-tionnement, et d'autre part la comparaison et la validation des capteurs et algorithmes mis en oeuvre.L'échange de composants (i.e. de briques fonctionnelles) compilés ou non, ainsi que d'enregistrements de données cap-teurs facilite grandement la coopération entre di�érentes équipes en protégeant si nécessaire la propriété intellectuelledes développements.Depuis la version 3, RTMaps dispose de fonctionnalités de distribution multipostes permettant de répartir les applicationssur plusieurs calculateurs, distants ou non.
III. Conception d'Interfaces Homme-Machine pour Automobiles
Notre activité dans la conception d'interfaces homme-machine (IHM) pour automobiles prend sa source dans les besoinsdes systèmes de transport intelligents (STI). Ces systèmes � innovants, variés et porteurs d'informations complexes �doivent pouvoir s'appuyer sur des interfaces homme-machine riches et spéci�ques. Leur processus de conception doitégalement se prêter au prototypage rapide. En�n, à ces besoins viennent s'ajouter des problématiques industrielles,notamment d'interopérabilité et de sécurité.
L'e�ort du CAOR dans ce domaine s'inscrit dans Edona[4],un projet issu de Numatech Automotive, groupe théma-tique du pôle de compétitivité System@atic. Edona/hmiest la déclinaison de cet ensemble � dédié à la productiond'environnements de développement pour les métiers de l'au-tomobile � aux interfaces hommes-machines. Le CAOR y col-labore avec des fournisseurs de technologies � dont Intempora� sous la direction de Visteon.Les contributions du CAOR concernent la modélisation des
IHMs, le développement d'outils de conception ainsi que d'unearchitecture d'exécution favorisant le prototypage rapide.Edona/hmi a adopté un processus de conception dirigé par
les modèles et basé sur des standards existants qui favorisel'interopérabilité. Les modèles d'IHMs sont structurés en troiscouches : graphique, composant et fonctionel.La couche graphique repose sur un graphe de scène 2D, une
collection hiérarchique de noeuds graphiques. Ce modèle estincarné dans un sous-ensemble du format SVG[2], [9] (pour
Scalable Vector Graphics) un standard du W3C très utilisé par les plate-formes mobiles. Ce format est ensuite étendupour que les données graphiques telles que les propriétés géométriques, le contenu en texte, les couleurs ou encore lavisibilité des éléments puissent être désignées comme des signaux dynamiques. L'encapsulation est ensuite assurée par lacouche de composants : seuls les signaux explicitement exposés dans l'interface d'un composant sont visibles en dehorsde sa portée. La hiérarchie des composants est par construction compatible avec la hiérarchie du document graphique.Ce modèle de composant serait toutefois condamné à exposer directement les données graphiques brutes, une stratégiequi ne permettrait pas une modélisation de haut-niveau et une réutilisation satisfaisante des composants. Le modèlecomplet inclut donc également une couche fonctionnelle sous la forme d'un langage synchrone de type �ux de données,un formalisme classique dans les systèmes embarqués et qui se prête à l'analyse par des méthodes formelles.Le support logiciel est crucial pour assurer le succès du modèle Edona/hmi. La plate-forme de prototypage du CAOR
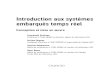
inclut un ensemble d'outils de modélisation, un générateur de composants HMIs ainsi qu'une architecture d'exécutionassociée basée sur Java. Cette plate-forme est spécialisée dans la simulation, le test de composant et le déploiementdans des véhicules prototypes, en particulier dédiés aux systèmes de transports intelligents. La �gure ci-dessus exposeun example de ces applications à travers une interface dédiée au projet LOVe[6], [8] de détection des vulnérables :vitesse et angle de lacet du véhicule, risque de collisions, données de la télémétrie sont representées dans une interfaceEdona/hmi. Cet exemple fait également la démonstration de contrôles (niveau de zoom, a�chage de la détection despiétons) ainsi que de l'intégration de l'interface à un �ux vidéo.
Références
[1] AROS : Agile Robust Operating Service. http://aros.intempora.com.[2] S. Boisgérault, M. O. Abdallah, and J.-M. Temmos. SVG for automotive user interfaces. In SVG Open, Nuremberg, Germany, 2008.
[3] RTMaps a Software Environment for Real-Time Applications Development. PhD thesis, December 2001. Ecole des Mines de Paris.[4] EDONA : Environnements de développement ouverts aux normes de l'automobile. http://www.edona.fr.[5] Contributions du CAOR à Edona/hmi . http://code.google.com/p/edona-hmi/.[6] G. Gate, A. Breheret, and F. Nashashibi. Centralized fusion based algorithm for fast people detection in dense environment. In Proc. of
the IEEE International Conference on Robotics and Automation, Kobe, Japan, May 2009.[7] Intempora. http://www.intempora.com/.[8] LOVe : Logiciel d'Observation des Vulnérables, project website. http://love.univ-bpclermont.fr.[9] Scalable Vector Graphics (SVG) 1.1 speci�cation. W3C recommendation, W3C, January 2003. http://www.w3.org/TR/SVG.